节点控制器说明书
- 格式:doc
- 大小:1.04 MB
- 文档页数:10
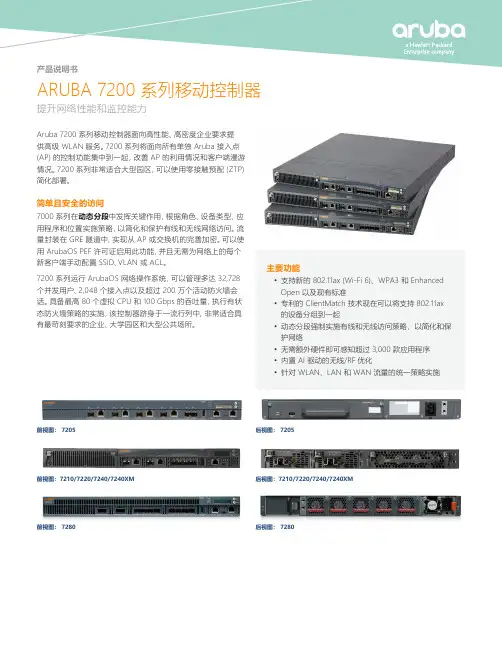
Aruba 7200 系列移动控制器面向高性能、高密度企业要求提供高级 WLAN 服务。
7200 系列将面向所有单独 Aruba 接入点 (AP) 的控制功能集中到一起,改善 AP 的利用情况和客户端漫游情况。
7200 系列非常适合大型园区,可以使用零接触预配 (ZTP) 简化部署。
简单且安全的访问7000 系列在动态分段中发挥关键作用,根据角色、设备类型、应用程序和位置实施策略,以简化和保护有线和无线网络访问。
流量封装在 GRE 隧道中,实现从 AP 或交换机的完善加密。
可以使用 ArubaOS PEF 许可证启用此功能,并且无需为网络上的每个新客户端手动配置 SSID、VLAN 或 ACL。
7200 系列运行 ArubaOS 网络操作系统,可以管理多达 32,728 个并发用户、2,048 个接入点以及超过 200 万个活动防火墙会话。
具备最高 80 个虚拟 CPU 和 100 Gbps 的吞吐量,执行有状态防火墙策略的实施,该控制器跻身于一流行列中,非常适合具有最苛刻要求的企业、大学园区和大型公共场所。
ARUBA 7200 系列移动控制器提升网络性能和监控能力前视图: 7205后视图: 7205后视图:7210/7220/7240/7240XM前视图:7210/7220/7240/7240XM 后视图: 7280前视图: 7280主要功能• 支持新的 802.11ax (Wi-Fi 6)、WPA3 和 Enhanced Open 以及现有标准• 专利的 ClientMatch 技术现在可以将支持 802.11ax 的设备分组到一起• 动态分段强制实施有线和无线访问策略,以简化和保护网络• 无需额外硬件即可感知超过 3,000 款应用程序• 内置 AI 驱动的无线/RF 优化• 针对 WLAN、LAN 和 WAN 流量的统一策略实施不会中断的关键任务型网络Aruba 独有的专利无线技术基于 AI 驱动的机器学习算法,直接集成到 ArubaOS 中。
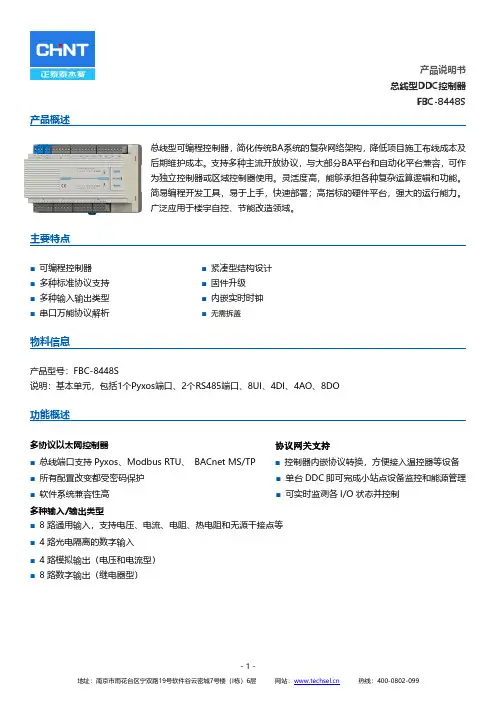
总线型DDC控制器FBC-8448S 产品概述总线型可编程控制器,简化传统BA系统的复杂网络架构,降低项目施工布线成本及后期维护成本。
支持多种主流开放协议,与大部分BA平台和自动化平台兼容,可作为独立控制器或区域控制器使用。
灵活度高,能够承担各种复杂运算逻辑和功能。
简易编程开发工具,易于上手,快速部署;高指标的硬件平台,强大的运行能力。
广泛应用于楼宇自控、节能改造领域。
主要特点■可编程控制器■紧凑型结构设计■多种标准协议支持■固件升级■多种输入输出类型■内嵌实时时钟■串口万能协议解析■无需拆盖物料信息产品型号:FBC-8448S说明:基本单元,包括1个Pyxos端口、2个RS485端口、8UI、4DI、4AO、8DO功能概述多协议以太网控制器协议网关支持■总线端口支持Pyxos、Modbus RTU、BACnet MS/TP■控制器内嵌协议转换,方便接入温控器等设备■所有配置改变都受密码保护■单台DDC即可完成小站点设备监控和能源管理■软件系统兼容性高■可实时监测各I/O状态并控制多种输入/输出类型■8路通用输入,支持电压、电流、电阻、热电阻和无源干接点等■4路光电隔离的数字输入■4路模拟输出(电压和电流型)■8路数字输出(继电器型)FBC-8448S技术参数FBC-8448S端口说明请按设备外壳接线端子引脚定义指示接线,接线端子引脚定义如下表所示。
接线前请切断电路以防触电,设备上电前检查供电是否在要求电压范围之内,供电不能超过此范围,否则容易烧坏模块。
安装和放置时应避免阳光直射,需防潮,不能受雨淋。
接线引脚定义表:PBUS功能说明指示灯说明DI1~DI4:4路开关量输入状态指示灯,有信号输入时指示灯亮DO1~DO8:8路开关量输出状态指示灯,有信号输出时指示灯亮TX1~TX2:RS485通讯发送状态指示灯(有数据发送时闪烁)RX1~RX2:RS485通讯接收状态指示灯(接收到数据时闪烁)RUN:设备运行指示灯,正常运行时闪烁PWR:电源指示灯(常亮)ERR:通讯异常状态指示灯(接收到非法数据时常亮,直至收到正确数据时灭)RST:默认配置状态指示灯,正常运行状态为灭,进入默认配置状态后快速闪烁按键说明PIN:预留控制器远程固件升级功能SVC(预留):进入默认配置按键,长按5秒设备进入默认配置状态总线型DDC控制器拨码及地址设置说明拨码开关定义:此型号未设置拨码功能。
一.系统介绍JB-QG-LD128EⅡ火灾报警控制器(联动型)(以下简称LD128EⅡ)是我公司最新研制成功的二总线智能化控制器。
它可以联接我公司生产的LD3000E系列智能探测器和LD6800E系列总线联动模块。
本火灾报警控制器适用标准为中华人民共和国国家标准《火灾报警控制器通用技术条件》(GB4717—93)和《消防联动控制设备通用技术条件》(GB16806—1997)。
0.1设计方式LD128EⅡ采用稳定、可靠的嵌入式控制部件及DCS的设计方式,保证系统长时间正常运行。
通过驱动板可方便地扩充探测回路。
同样,在系统的设计时充分考虑了在多机联网时的应用,采用对等式无主从的网络构架,在任何一台主机上均可以看到其它主机的信息,可实现主机之间的冗余和备份。
网络采用CAN(Control Area Networks)Bus(现场局域控制总线)方式,特别适合于消防、自动控制等工业领域,具有通讯稳定可靠,高抗干扰等特性。
0.2主要功能0.2.1操作界面LD128EⅡ使用大屏幕彩色TFT液晶作为显示的主要部件,集报警和联动的显示和操作为一身。
多窗口显示,互不影响和覆盖,大大方便使用人员操作。
全图形化的界面和不同设备和功能图标化的显示方式,更加直观,体现以人为本的设计理念。
0.2.2平面图显示可以显示各类单体建筑及建筑群的消防平面图,平面图数量不限。
在发生火警后,可以在平面图上显示报警控制器的位置。
0.2.3报警及操作记录可以贮存2000条报警、命令和人员操作记录。
关机后继续保存,不能被修改和删除,为事故分析提供了可靠的依据。
0.2.4二次编址每个设备均可以输入8个汉字,以表示具体位置。
除此之外,可以设定楼层号、房间号及房间名称。
使编址更方便,清晰。
0.2.5双语显示可以通过设置灵活切换中、英文语种并进行显示,方便在各地使用。
0.2.6119报警引导在火灾发生时,值班人员在拨打119过程中,往往因为情况紧急,不能清晰简明地将报警情况做出说明。
易福门3120控制器说明书
1、易福门控制器CAN参数:通讯周期
在某些应用中,可在此处设置由主站生成的SYNC报文的监控时刻。
请注意,此时刻要大于主站的SYNC时刻。
要通过实验确定**佳值。
在大多数情况下,进行节点监控有检测信号或节点维护足以。
2、易福门控制器CAN参数:无初始化
假如启用此选项,主站会很快运转节点,而不传输装备SDO,不过,会生成SDO数据并存储在控制器中。
3、易福门控制器CAN参数:节点ID
节点ID用于清晰标识CAN模块,并与介于1到127之间的模块集上的编号对应。
此ID以十进制方式输入,并在添加新的模块后主动添加1。
4、易福门控制器CAN参数:节点维护/检测信号设置
根据您能够挑选的装置:
[nodeguarding]和(lifetimefactor]要设置一项
要设置[heartbeat].
假如都设置,则只执行检测信号。
主张:为从那时起总线负载**低的当时装置运用检测信号功能。
5、易福门控制器CAN参数:创建SDO
假如启用此选项,则会为通讯目标生成SDO。

网络控制器使用说明书文件版本:V0.04功能特点●采用高性能工业级32位处理器;●支持继电器输出、开关量输入、模拟量输入(4~20mA);●开关量输入支持干接点通断开端量信号采集和湿节点高低电平信号采集;●支持以太网、2G、4G、Cat-1等多种通信方式(同时支持一种);●支持socket连接远程服务器,支持TCP Client;●具有1路RS485接口,可支持标准modbus RTU通讯协议;●RS485接口进行光耦隔离,保证设备可靠性;●通信波特率:2400,4800,9600,19200,38400(可以通过软件修改,默认9600);●可以设置1-254个设备地址,默认地址为201;●可通过云端或本地RS485接口进行配置;●支持小程序扫码控制,操作简单;●可通过RS485接口采集传感器数据并主动上报,最多支持24路传感器接入;●支持最多8路本地逻辑控制;●支持连接服务器地址配置;●支持本地逻辑控制功能,本机资源可进行联动控制;●采用工业级接线端子,适合现场应用;●多个指示灯显示工作状态;●宽电压DC7~36V输入●电源具有良好的过流、过压、防反接保护等功能。
目录网络控制器使用说明书 (1)功能特点 (1)一、快速入门 (3)1.1测试设备准备 (3)1.2简单使用 (3)二、产品概述 (4)2.1产品简介 (4)2.2设备基本参数 (4)2.3硬件描述 (7)2.3.1接口描述 (7)2.3.2尺寸描述 (8)三、接线说明 (9)3.1继电器输出(DO)接线 (9)3.1.1交流接线 (9)3.1.2直流接线 (10)3.2开关量输入(DI)接线 (11)3.3模拟量输入(AI,4~20mA)接线 (12)3.4RS485接口接线 (13)四、寄存器列表 (14)4.1参数寄存器列表 (14)4.1.1采集传感器数据存储规则说明 (16)4.1.2设备各种时间间隔参数说明 (16)4.1.3本地逻辑模式说明 (17)4.2状态寄存器列表 (17)4.2.1关于状态寄存器使用说明 (18)4.2.2关于主动上报协议说明 (18)软件配置说明 (19)5.1上位机软件配置说明 (19)5.2服务器配置说明 (21)5.2.1ZZ-IO222-2G服务器配置说明 (21)5.2.2ZZ-IO222-4G服务器配置说明 (21)5.2.3ZZ-IO222-J45服务器配置说明 (21)五、云端平台使用说明 (22)6.1小智物联云使用说明 (22)6.2沃田智联平台使用说明 (22)七、质保售后 (22)八、免责声明 (22)一、快速入门本章是针对ZZ-IO222网络控制器系列产品的快速入门介绍,建议用户系统的阅读本章并按照指示操作一遍,将会对模块产品有一个系统的认识,用户也可以根据需要选择你感兴趣的章节阅读。
PR-MC-*-4G多功能控制器用户手册Ver2.0目录第1章产品简介 (3)1.1产品概述 (3)1.2功能特点 (3)1.3主要参数 (3)1.4产品选型 (4)第2章硬件连接 (4)2.1设备安装前检查 (4)2.2设备安装及维护 (5)2.2.1接线前后注意事项 (5)2.2.2接线说明 (5)2.3安装方式 (6)2.4设备安装注意事项 (6)2.5设备维护与保养 (6)2.6常见问题及解决方法 (6)第3章接入云平台 (7)3.1上传节点设置及说明 (7)3.2设置举例 (7)3.3继电器操作说明 (7)3.4手机APP控制继电器说明 (8)3.5本地端控制 (8)第1章产品简介1.1产品概述PR-MC-*-4G多功能控制器是一款集成多路继电器的控制器。
本地端7寸触摸屏,多路开关量输出可用于各类场合的即时控制,可控制小于10A-250VAC/30VDC的设备,若控制大型设备,再连接中间继电器即可。
本产品即支持本地端手动控制,也可以充分利用已架设好的通讯网络连接至我司云平台,可通过电脑登录云平台及手机APP实现远距离的继电器控制,实现各类设备的集中控制,可大大减少施工量,减少施工成本和维护成本。
同时多功能控制器采用壁挂安装,使用方便。
广泛应用于:家居智能开关控制、酒店智能开关、宾馆智能电器控制、商场智能开关、公司厂房智能开关、网吧定时管理、卡拉OK计时控制、物联网、工控设备、测试设备电源控制、路灯管理、智能管理,集中电源管理等。
1.2功能特点⏹7寸触摸屏,中文展示,界面操作简洁;⏹4G(全网通)数据上传,减少施工成本和维护成本;⏹断电后自动断开继电器;⏹支持设备端手动控制,同时支持平台手动,自动、定时等控制方式;⏹自动条件,可联动同平台所有采集类设备;⏹支持我司提供的多款免费软件平台、用户也可以自己开发平台;⏹交流220V供电、可常年工作于室外。
1.3主要参数供电电压220VAC,50Hz功耗20W通信方式4G通信工作环境工作温度:-10℃~﹢50℃工作环境湿度:10%RH~85%RH继电器带载能力30V/10A-DC、255V/10A-AC 设备尺寸360*300*125(单位:mm)整体尺寸:360*300*125(单位:毫米1.4产品选型PR-公司代号MC-多功能控制器R08-8路无源继电器R16-16路无源继电器4G4G上传第2章硬件连接2.1设备安装前检查设备清单:⏹主设备1台;⏹合格证、保修卡等;⏹膨胀螺栓2个;⏹4G天线。
控制器的负载均衡说明书一、引言控制器是一种关键的设备,用于管理和控制网络中的流量和通信。
随着网络使用的增加,对控制器的负载能力提出了更高的要求。
负载均衡成为解决这一问题的有效策略,本说明书将详细介绍控制器的负载均衡机制。
二、负载均衡原理1. 概述负载均衡旨在实现对控制器负载的均匀分配,从而提高其处理能力和效率。
通过将请求分发到多个控制器节点,负载均衡可以确保每个节点的工作负担相对平衡,最大程度地发挥整个系统的性能。
2. 负载均衡算法(1)轮询算法:按照顺序将请求分发给每个控制器节点,保证每个节点获得相同数量的请求,适用于负载均衡需求相对简单的场景。
(2)加权轮询算法:根据控制器节点的处理能力和性能指标给节点分配不同的权重,使性能更强的节点能够处理更多的请求,适用于负载均衡需求较为复杂的场景。
(3)最少链接算法:将请求分发给当前连接数最少的节点,以达到负载均衡的效果,适用于在短时间内节点连接数波动较大的场景。
(4)哈希算法:根据请求的某个特征值(如源IP地址、目的IP地址等)进行哈希计算,将请求分发给特定的节点,保证相同特征值的请求都被发送到同一节点,适用于需要保持会话一致性的场景。
三、负载均衡实施1. 网络架构设计在设计网络架构时,应注意将多个控制器节点合理布置在网络拓扑中,确保节点之间的通信畅通,避免单点故障。
2. 负载均衡策略配置根据具体需求,选择合适的负载均衡算法,并对控制器节点进行相应的配置。
可以通过配置文件或命令行方式进行配置,确保负载均衡策略的灵活性。
3. 监控与调优定期监控控制器节点的负载情况,及时发现并处理负载过重的节点。
根据实际情况,进行负载均衡策略的调整和优化,以提高系统的整体性能。
四、案例分析以某大型云计算中心的控制器部署为例,采用负载均衡策略后,控制器的负载能力提高了50%以上,大大提升了云计算平台的性能和稳定性。
五、总结本说明书介绍了控制器的负载均衡机制及其实施方法。
通过合理配置负载均衡策略,并进行监控和调优,可以提升控制器的负载能力,保证网络系统的正常运行和高效性能。
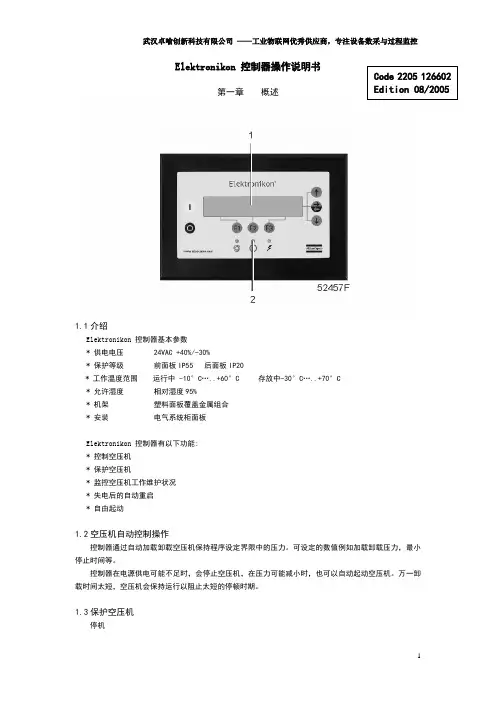
Elektronikon控制器操作说明书Array第一章概述1.1介绍Elektronikon控制器基本参数* 供电电压 24VAC +40%/-30%* 保护等级前面板IP55 后面板IP20* 工作温度范围运行中 -10°C…..+60°C 存放中-30°C…..+70°C* 允许湿度相对湿度95%* 机架塑料面板覆盖金属组合* 安装电气系统柜面板Elektronikon控制器有以下功能:* 控制空压机* 保护空压机* 监控空压机工作维护状况* 失电后的自动重启* 自由起动1.2空压机自动控制操作控制器通过自动加载卸载空压机保持程序设定界限中的压力。
可设定的数值例如加载卸载压力,最小停止时间等。
控制器在电源供电可能不足时,会停止空压机,在压力可能减小时,也可以自动起动空压机。
万一卸载时间太短,空压机会保持运行以阻止太短的停顿时期。
1.3保护空压机停机几个传感器提供给空压机进行检测。
假若这些测量值超出了控制器设定的停机警戒线,空压机将被停下。
同时屏幕1将会立即显示停机消息,以及报警灯2将会闪动。
停机报警停机报警警戒线是可设定的,低于最低停机警戒线的报警届限。
假若传感器测量值超出了控制器设定的停机报警警戒线,屏幕1将会立即显示报警消息,以及报警灯2将会闪动。
报警信息会很快随着报警条件的消失而消失。
失电后的自动重启控制器固化了空压机失电后的自动重启功能,根据需要设置将该功能激活。
自由起动给予起动命令后(通过控制器自动起动或是手动起动),进入自由起动操作。
第二章控制面板表一:控制面板操作第三章功能键功能键功能键1用途:* 手动加载卸荷空压机* 响应或程序设定* 主机过载,停机,维护信息,急停状态复位* 存取控制器收集的数据功能键功能的改变取决于屏幕菜单。
它最普通的功能列于下表。
表二:功能键功能第四章滚动键滚动键1可以在显示中进行滚动操作。
只要在屏幕中最右侧可以见到向下的箭头指示,就可以利用同样符号的滚动键查看下一个项目。
戴尔™ UPS 本地节点管理器®安装及配置用户指南说明说明:说明表示的是能帮助您更好的利用您计算机的重要信息。
____________________本文件所含信息如有更改,恕不另行通知。
© 2013 Dell Inc. 保留所有权利。
严禁在无 Dell Inc. 书面许可的情况下以任何方式对这些资料进行复制。
本文中使用到的商标: Dell及 Dell 标志是 Dell Inc. 的商标; Hyper-V、Microsoft、Windows、Internet Explorer、Windows Server、Windows 7、Windows XP 及 Windows Vista 为微软公司在美国及/或其他国家的商标或注册商标; Internet Explorer 是微软公司的注册商标;Firefox 是 Mozilla 基金会的注册商标; Linux 是 Linus Torvalds 公司的注册商标; Red Hat 是 Red Hat, Inc.的注册商标; Fedora 是 Red Hat, Inc 的注册商标;Safari 是苹果公司的注册商标; Ubuntu 是岛商肯诺有限公司的注册商标; VMware、ESX 及ESXi 是 VMware, Inc.公司的商标或注册商标; Mandriva 是 Mandriva S.A. 的注册商标; Novell是 Novell, Inc. 公司的注册商标以及 openSUSE 及 SUSE 是 Novell, Inc. 公司的注册商标;Xen、XenServer、XenCenter 及 XenMotion 是 Citrix Inc. 公司的注册商标或商标; Debian 是 Software in the Public Interest, Inc. (SPI) 公司的注册商标;Google 及Chrome 是谷歌公司的商标或注册商标;GNOME 是 GNOME 基金会的商标;Opera 是 Opera Software ASA 公司的商标; GNU 是自由软件基金会的注册商标。
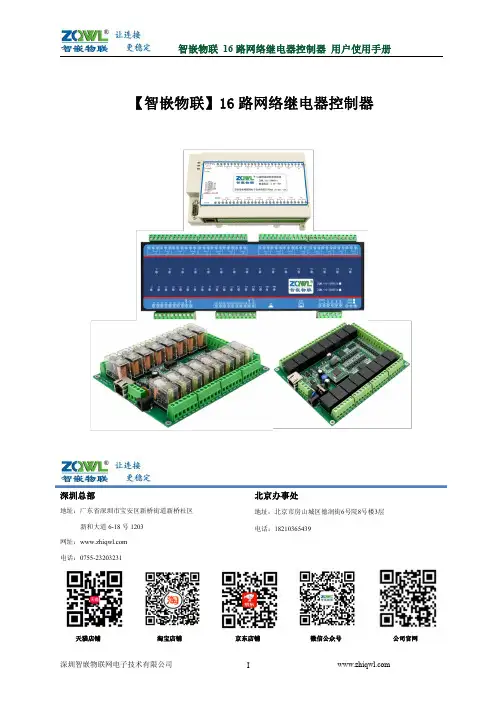
【智嵌物联】16路网络继电器控制器深圳总部地址:广东省深圳市宝安区新桥街道新桥社区新和大道6-18号1203网址: 电话:*************北京办事处地址:北京市房山城区德润街6号院8号楼3层电话:182****5439天猫店铺淘宝店铺京东店铺微信公众号公司官网修订历史版本日期原因V1.02021.06.27更新word样式、增加高级功能章节V1.12021.12.151、增加ASCII控制指令2、增加modbus功能码0x103、增加脉冲计数介绍4、增加设备间的一对一联动控制配置方法目录1.关于手册 (1)1.1命名规则 (1)1.2本手册适用型号 (2)1.3相关产品资料下载 (2)2.产品快速入门 (3)2.1功能特点 (3)2.2硬件准备 (3)2.3使用配置软件控制 (4)2.4使用网络调试助手控制 (8)3.产品规格 (9)3.1电气参数 (9)3.2工作环境参数 (9)3.3EMC防护等级 (9)3.4继电器规格 (9)3.5数字量输入参数 (10)3.6通信参数 (10)4.硬件接口及机械尺寸 (11)4.1产品接口布局 (11)4.1.1ZQWL-IO-1BX1C16、ZQWL-IO-2BX1C16接口布局 (11)4.1.2ZQWL-IO-1BXRC16、ZQWL-IO-2BXRC16接口布局 (12)4.1.3ZQWL-IO-1CNRC16、ZQWL-IO-2CNRC16、ZQWL-IO-1CN1C16、ZQWL-IO-2CN1C16 (13)4.1.4ZQWL-IO-1DXRC16、ZQWL-IO-1DX1C16、ZQWL-IO-2DXRC16、ZQWL-IO-2DX1C16 (14)4.2设备开关量输入 (14)4.3设备继电器输出接线 (16)4.4指示灯 (16)5.模块参数配置 (18)5.1智嵌网络IO配置软件 (18)5.2网页参数配置 (19)6.设备的高级功能 (23)6.1心跳包 (23)6.1.1心跳包 (23)6.1.2注册包 (23)6.2设备级联控制 (23)6.3设备DI输入状态自动上报 (24)6.4设备DI输入与DO输出联动 (24)6.5设备与设备之间联动 (25)6.6延时断开控制 (25)6.7定时控制 (26)6.8串口服务器功能 (26)7.模块通讯协议 (28)7.1自定义协议 (28)7.1.1控制指令 (28)7.1.2配置指令 (30)7.2ASCII控制协议 (32)7.2.1设置DO继电器输出状态 (32)7.2.2设置单路DO继电器状态 (32)7.2.3设置DO继电器延时断开时间 (33)7.2.4只读取DI状态 (33)7.2.5只读DO继电器状态 (34)7.2.6DI的脉冲计数值清零 (34)7.2.7只读DI的脉冲计数值 (35)7.3Modbus rtu协议 (35)7.4Modbus rtu指令码举例 (37)7.5Modbus TCP协议 (41)8.恢复出厂设置以及固件升级 (42)8.1恢复出厂设置 (42)8.2模块固件升级 (42)9.应用案例 (43)9.1网络IO控制器接入智嵌云控演示 (43)9.2网络IO控制器设备间一对一联动控制配置方法 (49)常见故障处理 (53)销售网络 (54)1.关于手册1.1命名规则智嵌物联继电器控制设备的命名规则如图 1.1所示。
Catalog Number: 700-1482-00Physical SpecificationsEnvironmental Specifications*All dimensions are millimeters.•Manages commands and responses from the user's Host Controller to QuickStick ® or MagneMover ® LITE Systems.•Coordinates vehicle (puck) movements.•Tracks errors in the system.•Programs and configures each motor.•Supports 12 motor communication points.•IP20 (IEC 60529) ingress protection rating.•Digital I/O (16 bits in/16 bits out) available for user supplied external devices such as E-stops and Light Stacks.•Serial I/O available for user supplied external devices.•CE Certified, UL Recognized.•19” rack mounting kit available.Dimensions *:260.0W x 207.7L x 87.3H Ambient Temperature:0°C to 50°C [32°F to 122°F]Weight:3.6kg [8.0lb]Relative Humidity:85% max, non-condensingPower Rating:22 - 30VDC, 20W (DC Power Jack, 2.0mm Coax, Male).Network:Standard 10/100/1000 BaseTx, full duplex, Ethernet (RJ-45, Female, IP67).Console:For connection of user-supplied terminal for setting the IP address (DE-9, Male).RS-232: 2 ports for connection to user-supplied devices (DE-9, Male).RS-422:12 ports for connection to MagneMotion linear synchronous motors (M8, Nano-Mizer, 4-Pin, Male).Digital I/O:16 optically isolated digital input bits and 16 optically isolated digital output bits (Spring Cage Clamp).Input: 3 - 24VDC (user supplied)Output: 5 - 35VDC (user supplied).250 UNC 2B .310 max 4XMounting HolesNetworkRS-422RS-232DC InNode Controller NC-12Rockwell Automation SupportUse the following resources to access support information.Documentation FeedbackY our comments will help us serve your documentation needs better. If you have any suggestions on how to improve this document, complete the How Are W e Doing? form at /idc/groups/literature/documents/du/ra-du002_-en-e.pdf .Technical Support CenterKnowledgebase Articles, How-to Videos, FAQs, Chat, User Forums, and Product Notification Updates.https:///Local Technical Support Phone Numbers Locate the phone number for your country./global/support/get-support-now.page Direct Dial Codes Find the Direct Dial Code for your product. Use the code to route your call directly to a technical support engineer./global/support/direct-dial.page Literature LibraryInstallation Instructions, Manuals, Brochures, and Technical Data./global/literature-library/overview.page Product Compatibility and Download Center (PCDC)Get help determining how products interact, check features and capabilities, and find associated firmware./global/support/pcdc.pageRockwell Otomasyon Ticaret A.Ş., Kar Plaza İş Merkezi E Blok Kat:6 34752 İçerenköy, İstanbul, T el: +90 (216) 5698400Rockwell Automation maintains current product environmental information is on its website at /rockwellautomation/about-us/sustainability-ethics/product-environmental-compliance.page .Product certificates are located in the Rockwell Automation Literature Library: /global/literature-library/overview.page Allen-Bradley, Rockwell Software, and Rockwell Automation are trademarks of Rockwell Automation, Inc.Trademarks not belonging to Rockwell Automation are property of their respective companies.Copyright © 2013–2016 MagneMotion, A Rockwell Automation Company. All Rights Reserved.139 Barnum Road, Devens, MA 01434, USA +1 978-757-9100Publication MMI-TD016E-EN-P - December 2016DIR 990000518Supersedes MMI-990000518 Rev. D。
EPEC控制器CANOPEN使用说明本CANOPEN采用的标准的CAN数据格式,11位的ID,有效数据长8个字节,8个字节。
CAN ID,DLC,D0,D1,D2,D3,D4,D5,D6,D7我们将这样一组CANOPEN数据叫做一路PDO。
利用CANOPEN组成的网络是一个主从网络,将控制器节点号最小的控制器设置为MASTER,其他的设置为SLA VE,因为控制器的节点号越小,其优先级越高。
如果一个控制器不虚拟节点往总线上发送数据,那么初始化结束后,本控制器往总线上发送4路TPDO:(CANOPEN_START_INIT 、CANOPEN_END_INIT)第一路PDO数据的ID为0X180+控制器的节点号第二路PDO数据的ID为0X280+控制器的节点号第三路PDO数据的ID为0X380+控制器的节点号第四路PDO数据的ID为0X480+控制器的节点号如果是再虚拟一个节点号发送数据,则发送的4路TPDO为:(CANOPEN_ADD_TRANSMIT_NODE_ID)第一路PDO数据的ID为0X180+虚拟控制器的节点号第二路PDO数据的ID为0X280+虚拟控制器的节点号第三路PDO数据的ID为0X380+虚拟控制器的节点号第四路PDO数据的ID为0X480+虚拟控制器的节点号如果是再虚拟一个节点号发送莫一路数据,则发送的PDO为:(CANOPEN_ADD_TRANSMIT_PDO)如果是虚拟第一路PDO数据的ID为0X180+虚拟控制器的节点号如果是虚拟第二路PDO数据的ID为0X280+虚拟控制器的节点号如果是虚拟第三路PDO数据的ID为0X380+虚拟控制器的节点号如果是虚拟第四路PDO数据的ID为0X480+虚拟控制器的节点号假设现在有三个控制器通过CANOPEN总线相连:控制器4 控制器7 控制器104号控制器CANOPEN初始化程序为:4号控制器发送4路PDO数据,发送的数据分别为第1路PDO,ID为0X184,发送%QW200~%QW203地址里的数据第2路PDO,ID为0X284,发送%QW204~%QW207地址里的数据第3路PDO,ID为0X384,发送%QW208~%QW211地址里的数据第4路PDO,ID为0X484,发送%QW212~%QW215地址里的数据4号控制器接收7号控制器发送的4路PDO数据和10号控制器发送的4路PDO数据%IW200~%IW203地址保存7号控制器发送的第1路PDO(ID=0X187)%IW204~%IW207地址保存7号控制器发送的第2路PDO(ID=0X287)%IW208~%IW211地址保存7号控制器发送的第3路PDO(ID=0X387)%IW212~%IW215地址保存7号控制器发送的第4路PDO(ID=0X487)%IW216~%IW219地址保存10号控制器发送的第1路PDO(ID=0X18A)%IW220~%IW223地址保存10号控制器发送的第2路PDO(ID=0X28A)%IW224~%IW227地址保存10号控制器发送的第3路PDO(ID=0X38A)%IW228~%IW231地址保存10号控制器发送的第4路PDO(ID=0X48A)7号控制器CANOPEN初始化程序为:7号控制器发送4路PDO数据,发送的数据分别为第1路PDO,ID为0X187,发送%QW200~%QW203地址里的数据第2路PDO,ID为0X287,发送%QW204~%QW207地址里的数据第3路PDO,ID为0X387,发送%QW208~%QW211地址里的数据第4路PDO,ID为0X487,发送%QW212~%QW215地址里的数据7号控制器接收4号控制器发送的4路PDO数据和10号控制器发送的4路PDO数据%IW200~%IW203地址保存4号控制器发送的第1路PDO(ID=0X184)%IW204~%IW207地址保存4号控制器发送的第2路PDO(ID=0X284)%IW208~%IW211地址保存4号控制器发送的第3路PDO(ID=0X384)%IW212~%IW215地址保存4号控制器发送的第4路PDO(ID=0X484)%IW216~%IW219地址保存10号控制器发送的第1路PDO(ID=0X18A)%IW220~%IW223地址保存10号控制器发送的第2路PDO(ID=0X28A)%IW224~%IW227地址保存10号控制器发送的第3路PDO(ID=0X38A)%IW228~%IW231地址保存10号控制器发送的第4路PDO(ID=0X48A)10号控制器CANOPEN初始化程序为:10号控制器发送4路PDO数据,发送的数据分别为第1路PDO,ID为0X18A,发送%QW200~%QW203地址里的数据第2路PDO,ID为0X28A,发送%QW204~%QW207地址里的数据第3路PDO,ID为0X38A,发送%QW208~%QW211地址里的数据第4路PDO,ID为0X48A,发送%QW212~%QW215地址里的数据10号控制器接收4号控制器发送的4路PDO数据和7号控制器发送的4路PDO数据%IW200~%IW203地址保存4号控制器发送的第1路PDO(ID=0X184)%IW204~%IW207地址保存4号控制器发送的第2路PDO(ID=0X284)%IW208~%IW211地址保存4号控制器发送的第3路PDO(ID=0X384)%IW212~%IW215地址保存4号控制器发送的第4路PDO(ID=0X484)%IW216~%IW219地址保存7号控制器发送的第1路PDO(ID=0X187)%IW220~%IW223地址保存7号控制器发送的第2路PDO(ID=0X287)%IW224~%IW227地址保存7号控制器发送的第3路PDO(ID=0X387)%IW228~%IW231地址保存7号控制器发送的第4路PDO(ID=0X487)如果数据没有改变,则控制器每隔300毫秒发送一次数据,如果数据改变了,则控制器会马上将改变的数据发送到总线上。
车位引导系统节点控制器说明书产品型号和外观如有变更,请以现场实物为准。
在不影响产品功能说明的情况下,本说明书同样适用。
如需了解详细变更情况,请与本公司联系。
本说明书版权归本公司所有,本公司对此手册保留最终解释权。
2013年9月出版 2013年9月第1次印刷警告■本设备只能由专业人员进行安装和维护。
■不能对本设备进行各种擅自改装或加装。
■设备在使用中应提供正确的额定电压。
■在设备通电前,应首先保证线路连接正确,其箱体、门、盖子等部件应恢复原位。
■对因不遵守本手册说明而引起的设备损坏,厂家不承担任何责任。
触电危险■在进行设备接线时请确保电源断开。
在带电时连接各部件可能引起点击,从而导致设备永久性损毁,人员受伤甚至死亡。
■按照国家、地区和当地的规定给设备接地。
接地失效可能导致设备通讯不稳定,人员受伤甚至死亡。
目录一、系统概述┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈11、系统简介┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈12、系统结构图┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈1二、功能介绍┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈21、产品概述┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈22、产品功能┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈2三、技术规格参数┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈2四、外观和尺寸┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈31、产品外观图┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈32、产品安装图┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈3五、安装与接线┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈41、接线说明┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈42、注意事项┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈5六、操作说明┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈51、状态指示灯功能说明┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈52、拨码地址设置说明┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈5七、常见故障及处理┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈6一、系统概述1、系统简介停车引导系统是一套可用于室内外停车场车位引导系统。
控制器通讯协议说明书注意事项:本文将详细说明控制器通讯协议的相关知识和技术要点,重点介绍控制器通讯协议在工业自动化环境下的应用和实践。
本文涵盖了常见的控制器通讯协议、通讯模式和通讯接口,同时还探讨了控制器通讯协议在不同场景下的优缺点和使用限制。
此外,本文还提供了一些实用的技术建议和应用案例,旨在帮助读者更好地理解和应用控制器通讯协议。
1.控制器通讯协议简介控制器通讯协议是一种用于实现控制器之间或者控制器和PC之间的数据交换协议,其目的是在不同的控制器系统中实现信息共享和互操作性。
常见的控制器通讯协议有Modbus、CAN、Profibus、Ethernet、DeviceNet、HART、AS-i等。
每种控制器通讯协议都有其特定的通讯模式和通讯接口。
2.控制器通讯协议的通讯模式控制器通讯协议的通讯模式可以分为两种:点对点通讯和总线通讯。
点对点通讯是指两个节点之间直接建立通信连接,每一个节点都有唯一的地址,比如RS232、RS422/485等。
总线通讯是指多个节点通过同一条总线完成通信,每个节点都可以向总线发布数据或者接收数据,比如CAN、Ethernet、Profibus、DeviceNet等。
3.控制器通讯协议的通讯接口控制器通讯协议的通讯接口可以分为两种:硬件接口和软件接口。
硬件接口通常使用物理接口来连接设备,比如串口、网口、USB等。
软件接口通常使用软件API接口来实现数据交换,比如Modbus TCP、Modbus RTU等。
4.常见控制器通讯协议的特点和应用场景4.1 ModbusModbus是一种常用的串行通信协议,常用于工业自动化领域的设备之间的通信。
Modbus协议采用基于请求/响应的通讯方式,支持点对点和总线通讯,支持多种不同的传输媒介。
Modbus协议的应用广泛,包括远程监控、传感器网络、机器人控制等。
4.2 CANCAN是一种通用的总线协议,广泛应用于汽车电子、机器人控制、工业控制等领域。
ARM版遥控闭锁控制器(YKBSKZQ-1)调试说明书1.ARM版遥控闭锁控制器注意:本部分说明针对arm版遥控闭锁装置,新增以太网接口,多屏联网规约,单总线短路检测,通过主机硬节点控制总解锁/总闭锁,具体内容见详述。
ARM版遥控闭锁控制器用于接受防误主机下达的解/闭锁命令,控制相应的遥控闭锁继电器进行解/闭锁操作。
主要用于集中组屏的安装的场所。
硬件版本为UT0301-1101V3.00主机增加了对多屏联网规约的转发功能和接收集控主站解闭锁功能。
可应用于集控站。
系统原理图如图1所示。
图1:遥控闭锁集控站方式应用图在集控站正常工作是,集控主站以网络式通过遥控闭锁控制器转与集控子站通信,子站如果接收到主站的解/闭锁命令,子站通过串口或网络向遥控闭锁控制器发送解/闭锁命令,从而实现控制闭锁继电器;如果子站异常(不在线等)时,主站可直接以网络方式与遥控闭锁控制器通信,实现控制遥控闭锁继电器。
本设置适用于硬件版本为UT0301-1101V3.00主机、UT0301-1201V3.00从机。
使用UT2000-5FV3.0编译器进行数据配置。
使用UT2000-5FV3.0编译器接遥控闭锁控制器COM1口进行主机程序和配置数据的下载。
下载时UT2000-5FV3.0串口波特率设为576000,使用5f编程电缆。
装置端子图如如2所示。
图2:ARM版遥控闭锁控制器端子图功耗:ARM版遥控闭锁控制器连同所带的继电器的最大功耗为150W端口说明COM1为调试口,用于下载程序及组态、跟踪调试;COM2为RS232口,COM3为RS422口,COM2和COM3都为与监控通信端口;COM4为485级联端口。
CAN口目前没有用到。
与编译器的端口对应关系及规约配置可参考下表:1.3UT2000-5FV3.0从站设备配置说明本项配置决定系统使用几台遥控闭锁控制器(根据现场情况决定使用台数)。
具体配置可参考图3。
图3:从站设备配置图说明:如果系统只使用一台遥控闭锁控制器,则遥控闭锁设备板数配置为4×1;如果n台遥控闭锁控制器级联使用(1台为主机,n﹣1台为从机),则遥控闭锁设备板数配置为4×n。
Compact GuardLogix 5370 控制器产品目录号 1769-L30ERMS 、1769-L33ERMS 、1769-L33ERMOS 、1769-L36ERMS 、1769-L36ERMOS 、1769-L37ERMOS用户手册原版说明书的中文译本重要用户须知在安装、配置、操作或维护设备之前,请仔细阅读本文档及“其他资源”部分列出的文档,了解设备的安装、配置和操作信息。
用户需要了解安装和接线说明以及所有适用规范、法律和标准的相关要求。
安装、调节、投入使用、操作、装配、拆卸和维护等活动均要求由经过适当培训的人员遵照适用法规执行。
如果未按制造商指定的方式使用设备,则设备提供的保护功能可能会受到影响。
任何情况下,对于因使用或操作本设备造成的任何间接或连带损失,罗克韦尔自动化有限公司概不负责。
本手册中的示例和图表仅供说明之用。
由于任何具体的安装都存在很多差异和要求,罗克韦尔自动化公司对于依据这些示例和图表进行的实际应用不承担任何责任和义务。
对于因使用本手册中所述信息、电路、设备或软件而引起的专利问题,罗克韦尔自动化有限公司不承担任何责任。
未经罗克韦尔自动化有限公司的书面许可,不得复制本手册的全部或部分内容。
在整本手册中,我们在必要的地方做以下注释,以提醒您注意相关的安全事宜。
标签可能位于设备表面或内部,以提供特定警示。
警告:用于标识在危险环境下可能导致爆炸,进而导致人员伤亡、物品损坏或经济损失的操作或情况。
注意: 用于标识可能导致人员伤亡、物品损坏或经济损失的操作或情况。
注意符号可帮助您确定危险、避免危害并了解可能的后果。
重要事项用于标识对成功应用和了解本产品有重要作用的信息。
电击危险:位于设备 (例如,驱动器或电机) 表面或内部的标签,提醒相关人员可能存在危险电压。
灼伤危险: 位于设备 (例如,驱动器或电机) 表面或内部的标签,提醒相关人员表面可能存在高温危险。
弧闪危险:位于设备 (例如,电机控制中心) 表面或内部的标签,提醒人们可能出现闪弧。
车位引导系统节点控制器说明书
产品型号和外观如有变更,请以现场实物为准。
在不影响产品功能说明的情况下,本说明书同样适用。
如需了解详细变更情况,请与本公司联系。
本说明书版权归本公司所有,本公司对此手册保留最终解释权。
2013年9月出版 2013年9月第1次印刷
警告
■本设备只能由专业人员进行安装和维护。
■不能对本设备进行各种擅自改装或加装。
■设备在使用中应提供正确的额定电压。
■在设备通电前,应首先保证线路连接正确,其箱体、门、盖子等部件应恢复原位。
■对因不遵守本手册说明而引起的设备损坏,厂家不承担任何责任。
触电危险
■在进行设备接线时请确保电源断开。
在带电时连接各部件可能引起点击,从而导致设备永久性损毁,人员受伤
甚至死亡。
■按照国家、地区和当地的规定给设备接地。
接地失效可能导致设备通讯不稳定,人员受伤甚至死亡。
目录
一、系统概述┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈1
1、系统简介┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈1
2、系统结构图┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈1
二、功能介绍┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈2
1、产品概述┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈2
2、产品功能┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈2
三、技术规格参数┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈2
四、外观和尺寸┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈3
1、产品外观图┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈3
2、产品安装图┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈3
五、安装与接线┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈4
1、接线说明┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈4
2、注意事项┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈5
六、操作说明┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈5
1、状态指示灯功能说明┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈5
2、拨码地址设置说明┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈5
七、常见故障及处理┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈6
一、系统概述
1、系统简介
停车引导系统是一套可用于室内外停车场车位引导系统。
系统使用超声波探测器检测车
位状态。
节点控制器通过C-MBUS 通讯方式轮询采集其总线下各超声波探测器检测的信息,并传输至中央控制器。
由中控器统计各区域的剩余车位数量,实时更新室内信息屏发布相关的引导信息,进行停车引导,各车位上方的车位指示灯根据超声波探测器的探测结果切换指示状态,进行人性化停车引导。
2、系统结构图
图
1.1 停车引导系统结构
C-MBUS
总线 C-MBUS
C-MBUS 计算机
C-MBUS
C -M B U S 总线
C -M B U S 总线
C-MBUS 红绿灯 节点控制器 #64 红绿灯 红绿灯 超声波探测器 #64 超声波探测器 #1
节点控制器 #1
车位引导屏
#64
超声波探测器 #64 车位引导屏 #1 超声波探测器 #1 中央控制器 串口 红绿灯
二、功能介绍
1、产品概述
节点控制器是专门用于对超声波探测器进行数据采集的装置。
它具有实时巡检探测器状态的功能。
节点控制器通过C-MBUS总线上传信息,并接受中央控制器命令等功能,是停车场引导系统中一个重要的设备。
2、产品功能
三、技术规格参数
四、外观和尺寸
1、产品外观图
暂无机箱实物图
图4.1产品外观图2、产品安装图
图4.2产品安装图
五、安装与接线
1、接线说明
图5.1 接线原理图
2、注意事项
(1)节点控制器为标准的C-MBUS通讯信号,要求采用RVS2×0.5mm²以上规格双绞线,越粗越好,无需屏蔽,任意布线,通讯线不分正负极,采用与中央控制器和探头就近原则,距离越近通信效果越好;
(2)节点控制器采用DC24V/4.5A 蜂窝电源,同时给其总线下探头供电,电源线采用RVS2×1.0mm²以上规格护套线
(3)节点控制器有两路功能一样的下行信号接口,两路接口最多共能连接64个探头,且所有探头地址不能重复,建议每路下行接口各接32个探测器
(4)节点控制器有一路上行信号,要求采用RVS2×0.5mm²以上规格双绞线连接中央控制器(5)避免安装在阳光直射,潮湿多油污的环境。
六、操作说明
1、双色LED点阵显示功能说明
图6.1双色LED点阵原理图
图6.2双色LED点阵实物图
每一个LED点对应一个探头状态, LED点阵图上编号对应地址编号相同的探头
LED状态说明:
绿灯常亮无车
红灯常亮有车
绿灯闪烁通信异常
红灯闪烁探测异常
2、拨码地址设置说明
安装时,要注意查看是否已近设置好地址,其有效地址范围是00﹣63号,8P拨码开关的1﹣6位.每位所对应的权值依次为1、2、4、8、16、32,当某位开关置于“ON”端时,
表示为“1”,反之为“0”。
节点控制器的地址就等于每个位的加权和(即各位开关的值先乘以相应的权值然后再相加)。
例如下图拨码开关设置的地址为:0×1+0×2+1×4+0×8+0×16+0×32=4。
图6.3拨码地址设置图
七、常见故障及处理
常见现象分析与解决方法备注
板子不工作检查电压供给是否有异常,检测板上LED红灯是否工作
LED点阵所有绿
灯闪烁
检测下行通信线连接是否短路或短路
上述问题经检查后无法解决,请与本公司客户服务工程师联系,请勿自行拆卸产品,防止损坏。