第3章角度测量(全站仪)
- 格式:ppt
- 大小:1.73 MB
- 文档页数:24
全站仪测角度步骤详细全站仪具有角测量、距离(斜距、平距、高差)测量、三维坐标测量、导线测量、交会定点测量和放样测量等多种用途。
内置专用软件后,功能还可进一步拓展。
全站仪的基本操作与使用方法:1)水平角测量(1)按角度测量键,使全站仪处于角度测量模式,照准第一个目标A。
(2)设置A方向的水平度盘读数为0°00/00〃。
(3)照准第二个目标B,此时显示的水平度盘读数即为两方向间的水平夹角。
2)距离测量(1)设置棱镜常数测距前须将棱镜常数输入仪器中,仪器会自动对所测距离进行改正。
(2)设置大气改正值或气温、气压值光在大气中的传播速度会随大气的温度和气压而变化,15°C和760mmHg是仪器设置的一个标准值,此时的大气改正为0ppm。
实测时,可输入温度和气压值,全站仪会自动计算大气改正值(也可直接输入大气改正值),并对测距结果进行改正。
(4)距离测量照准目标棱镜中心,按测距键,距离测量开始,测距完成时显示斜距、平距、高差。
全站仪的测距模式有精测模式、跟踪模式、粗测模式三种。
精测模式是最常用的测距模式,测量时间约2.5S,最小显示单位1mm;跟踪模式,常用于跟踪移动目标或放样时连续测距,最小显示一般为1cm,每次测距时间约0.3S;粗测模式,测量时间约0.7S,最小显示单位1cm或1mm。
在距离测量或坐标测量时,可按测距模式(MODE)键选择不同的测距模式。
应注意,有些型号的全站仪在距离测量时不能设定仪器高和棱镜高,显示的高差值是全站仪横轴中心与棱镜中心的高差。
3)坐标测量(1)设定测站点的三维坐标。
(2)设定后视点的坐标或设定后视方向的水平度盘读数为其方位角。
当设定后视点的坐标时,全站仪会自动计算后视方向的方位角,并设定后视方向的水平度盘读数为其方位角。
(3)设置棱镜常数。
(4)设置大气改正值或气温、气压值。
(6)照准目标棱镜,按坐标测量键,全站仪开始测距并计算显示测点的三维坐标。
全站仪的数据通讯全站仪的的数据通讯是指全站仪与电子计算机之间进行的双向数据交换。
第3章经纬仪及其角度测量3.1 角度测量原理角度测量是测量工作的重要内容之一。
角度测量的目的是测定地面点连线之间的空间位置关系,以此来确定点的平面坐标和高程,它包括水平角测量和竖直角测量,所采用的仪器为光学经纬仪、电子经纬仪和全站仪等。
本章重点介绍光学经纬仪及其角度测量方法。
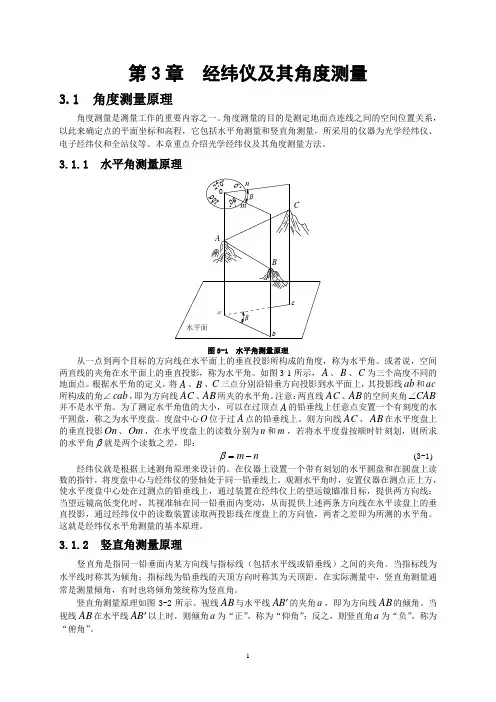
3.1.1 水平角测量原理图3-1 水平角测量原理从一点到两个目标的方向线在水平面上的垂直投影所构成的角度,称为水平角。
或者说,空间两直线的夹角在水平面上的垂直投影,称为水平角。
如图3-1所示,A、B、C为三个高度不同的地面点。
根据水平角的定义,将A、B、C三点分别沿铅垂方向投影到水平面上,其投影线ab和ac∠所构成的角∠cab,即为方向线AC、AB所夹的水平角。
注意:两直线AC、AB的空间夹角CAB 并不是水平角。
为了测定水平角值的大小,可以在过顶点A的铅垂线上任意点安置一个有刻度的水平圆盘,称之为水平度盘。
度盘中心O位于过A点的铅垂线上。
则方向线AC、AB在水平度盘上的垂直投影On、Om,在水平度盘上的读数分别为n和m,若将水平度盘按顺时针刻划,则所求的水平角β就是两个读数之差,即:β(3-1)=nm-经纬仪就是根据上述测角原理来设计的。
在仪器上设置一个带有刻划的水平圆盘和在圆盘上读数的指针,将度盘中心与经纬仪的竖轴处于同一铅垂线上。
观测水平角时,安置仪器在测点正上方,使水平度盘中心处在过测点的铅垂线上,通过装置在经纬仪上的望远镜瞄准目标,提供两方向线;当望远镜高低变化时,其视准轴在同一铅垂面内变动,从而提供上述两条方向线在水平读盘上的垂直投影,通过经纬仪中的读数装置读取两投影线在度盘上的方向值,两者之差即为所测的水平角。
这就是经纬仪水平角测量的基本原理。
3.1.2 竖直角测量原理竖直角是指同一铅垂面内某方向线与指标线(包括水平线或铅垂线)之间的夹角。
当指标线为水平线时称其为倾角;指标线为铅垂线的天顶方向时称其为天顶距。
全站仪角度测量步骤全站仪是一种测量仪器,可以用于进行角度测量。
以下是全站仪角度测量的步骤:1.准备工作首先,需要确保全站仪的电量充足,并且仪器的各项功能正常。
同时,需要检查三脚架及测量杆等设备是否完好,并确保仪器的水平调准。
2.安装全站仪将全站仪安装在三脚架上,通过调整螺丝和水平器,使仪器水平放置。
同时,还要确保仪器能够在360度范围内旋转自由。
3.定点校准将全站仪对准参考点,然后使用调节螺丝进行微调,使仪器指向准确。
通过观察仪器上的视觉显示器可以确定仪器是否对准。
4.设置测量模式在全站仪的界面中,选择角度测量模式。
根据需要选择水平角、垂直角或倾斜角的测量模式。
通常可以在全站仪上选择自动或手动测量模式。
5.角度测量在选择好测量模式后,开始进行角度测量。
全站仪会发送一束激光到目标点,然后接收来自目标点的反射光。
通过测量反射光与仪器位置的角度差,可以得到目标点的角度。
6.存储和记录数据每次测量完成后,将数据存储在全站仪的内存中或直接上传到计算机上。
确保记录测量的时间、日期、测量点等相关信息,以备后续分析和处理。
7.再次校准在进行下一次角度测量之前,需要再次校准全站仪。
可以选择不同的参考点,以确保仪器的准确性。
8.数据处理和分析将测量数据导入计算机,使用相应的软件进行处理和分析。
可以进行数据的图表展示、计算测量点之间的距离和角度,以及制作测量结果的报告。
9.定期维护全站仪是一种精密的测量仪器,需要进行定期维护和校准,以保证其准确性和稳定性。
应该注意仪器的使用方式、存放条件和清洁方法,在使用后进行及时的维修和保养。
全站仪角度测量步骤主要包括准备工作、安装全站仪、定点校准、设置测量模式、角度测量、存储和记录数据、再次校准、数据处理和分析以及定期维护等内容。
通过这些步骤的科学操作,可以获得准确而可靠的角度测量结果。
全站仪角度测量的方法与步骤
一、水平角测量
1. 按角度测量键,使全站仪处于角度测量模式,照准第一个目标A。
2. 设置A方向的水平度盘读数为0°00′00″。
3. 照准第二个目标B,此时显示的水平度盘读数即为两方向间的水平夹角。
二、竖直角测量
1. 竖直角测量可在角度测量模式下进行,将望远镜对准目标,按下竖直角测量键,仪器显示屏上即显示出竖直角。
2. 若要计算某两点间的高差,则先测出两点的竖直角,再用三角函数计算出两点间的高差。
全站仪是一种集光、机、电为一体的高技术测量仪器,是集水平角、竖直角、距离(斜距、平距)、高差测量功能于一体的测绘仪器系统。
因其一次安置仪器就可完成该测站上全部测量工作,所以称之为全站仪。
广泛用于地上大型建筑和地下隧道施工等精密工程测量或变形监测领域。
角度测量全站仪计算公式全站仪是一种用于测量地面和建筑物的仪器,它可以测量水平角度和垂直角度。
在使用全站仪进行角度测量时,需要使用一些计算公式来准确地计算出测量结果。
本文将介绍一些常用的角度测量全站仪计算公式,并对其进行详细解释。
1. 水平角度计算公式。
在使用全站仪进行水平角度测量时,需要使用以下计算公式:水平角度 = 初始角度 + 观测角度。
其中,初始角度是全站仪的初始位置角度,观测角度是通过全站仪测量得到的角度。
通过这个公式,可以计算出任意位置的水平角度。
2. 垂直角度计算公式。
在使用全站仪进行垂直角度测量时,需要使用以下计算公式:垂直角度 = 初始角度 + 观测角度。
与水平角度计算公式类似,垂直角度的计算也是将初始角度和观测角度相加得到最终的角度值。
3. 角度差计算公式。
在实际测量中,有时需要计算两个角度之间的差值,这时可以使用以下计算公式:角度差 = 角度1 角度2。
通过这个公式,可以计算出两个角度之间的差值,从而得到更精确的测量结果。
4. 角度平均值计算公式。
在进行多次角度测量后,有时需要计算这些测量结果的平均值,这时可以使用以下计算公式:角度平均值 = (角度1 + 角度2 + ... + 角度n) / n。
通过这个公式,可以计算出多次角度测量结果的平均值,从而得到更准确的测量结果。
5. 角度误差计算公式。
在测量过程中,可能会出现一些误差,需要对这些误差进行计算和修正。
对于角度测量误差,可以使用以下计算公式:角度误差 = |测量角度真实角度|。
通过这个公式,可以计算出测量角度与真实角度之间的误差值,从而对测量结果进行修正和调整。
总结。
全站仪是一种非常重要的测量仪器,它可以帮助我们准确地测量地面和建筑物的角度。
在使用全站仪进行角度测量时,需要使用一些计算公式来计算和修正测量结果。
本文介绍了一些常用的角度测量全站仪计算公式,并对其进行了详细的解释。
希望这些内容能够帮助大家更好地理解和应用全站仪的角度测量功能。
全站仪角度测量原理全站仪是一种测量仪器,主要用于测量地面上的地形、建筑物、道路等工程物体的位置和角度。
全站仪通过测量地面上的参考点的位置信息和仪器自身的角度信息来确定目标物体的位置和角度。
全站仪的角度测量原理是基于光学和电子测量的组合。
在全站仪中,角度测量是通过转台和角度传感器相结合来实现的。
转台是一个旋转的平台,安装在仪器顶部。
转台上面装有一束光,并且能够在水平和垂直方向上旋转。
角度传感器则安装在转台上,用于测量旋转角度。
角度传感器可以是光学角度传感器或电子角度传感器。
当全站仪需要进行角度测量时,转台上的光束会发射出去,并被反射回来。
全站仪通过测量光束的角度偏移来计算出目标点的角度信息。
在这过程中,全站仪会使用一种叫做回避接收器的装置,用于接收反射的光束。
具体而言,全站仪会通过旋转转台来扫描整个水平和垂直方向。
当光束遇到目标点时,反射回来,并被回避接收器接收。
回避接收器会将接收到的光束转化为电信号,并传输给测量仪器。
测量仪器会通过计算光束的角度偏移来确定目标点与仪器之间的角度。
值得注意的是,全站仪在角度测量的过程中需要考虑一些误差因素。
例如,由于大气折射的影响,光束在传输过程中有可能产生折射误差。
此外,仪器本身的精度和稳定性也会对角度测量的结果产生一定的影响。
为了提高测量的准确性,全站仪通常会采用一些误差补偿的方法,如空间三角测量法和闭环水平测量法。
总结起来,全站仪的角度测量原理是基于光学和电子测量的组合。
通过旋转转台和角度传感器相结合,全站仪可以测量目标点的角度信息。
在角度测量过程中,需要考虑误差因素,并采用一些误差补偿的方法提高测量的准确性。
通过全站仪的角度测量,可以准确确定工程物体的角度位置,为工程测量提供重要的数据支持。
全站仪测量中的角度测量与调整方法详解全站仪(Total Station)是一种高精度的测量仪器,广泛应用于土木工程和建筑工程中。
它能够同时测量水平角、垂直角和斜距,被称为“三角测量仪”。
角度测量是全站仪的核心功能之一,它对于保证测量数据的准确性和可靠性至关重要。
本文将详细介绍全站仪中的角度测量与调整方法。
一、角度测量原理角度测量的原理基于全站仪内置的光电测角系统。
全站仪通过发射一束可见光激光器,然后由目标物体反射回来,通过接收器接收到反射光,并通过光电探测器将光信号转化为电信号。
根据电信号的变化,可以计算出目标物体与全站仪之间的角度。
二、角度测量误差在实际测量中,角度测量误差是无法避免的。
常见的角度测量误差包括系统误差和随机误差。
系统误差是由仪器制造和仪器调试过程中的偏差引起的,如仪器的非正交性和刻度盘的零位误差等。
随机误差是由环境条件和人为操作引起的,如大气折射、测量人员稳定性等。
为了减小误差,需要进行角度测量的调整。
三、角度测量调整方法1. 零位偏差调整为保证角度的准确性,需要调整全站仪的零位偏差。
零位偏差是指刻度盘的零位与水平或垂直位置之间的偏差。
调整零位偏差的方法是利用标准角度进行对比测量,然后调整仪器的零位值,使其与标准角度一致。
2. 非正交性调整全站仪的非正交性是指水平轴和垂直轴之间的角度差异。
通过对一组已知角度进行测量,可以计算出水平轴和垂直轴之间的角度差异,并对全站仪进行调整,使其满足正交性。
3. 角度降解及磁力调整在实际测量中,全站仪常常会受到外部磁场的干扰,导致角度测量精度下降。
为了消除磁场对角度测量的影响,需要进行角度降解和磁力调整。
角度降解是指将全站仪所受到的外部磁场干扰分解成水平和垂直两个方向的力,并通过调整磁力平衡器来消除其影响。
4. 大气折射调整大气折射是指光线在经过大气层时由于大气密度变化而发生的折射现象。
大气折射会引起角度测量误差,尤其是在测量距离较长的情况下。
第三章角度测量单选题1、经纬仪水平度盘调平用(B)。
A.微倾螺旋B.脚螺旋C.微动螺旋D.轴座固定螺旋2、目前国产DJ6级光学经纬仪度盘分划值是(A)。
A.1°和30′B.2°和1°C.30′和15′D.2°和4°3、水平角的角值范围是(C)。
A. 00~1800B. -900~+900C. 00~3600D. -1800~+18004、DJ6经纬仪的测量精度通常要(D)DJ2经纬仪的测量精度。
A.等于B.高于C.接近于D.低于5、光学经纬仪有DJ1、DJ2、DJ6多种型号,数字下标1、2、6表示( A )中误差的值。
A.水平角测量一测回角度B.竖直方向测量一测回方向C.竖直角测量一测回角度D.水平方向测量一测回方向6、地面上两相交直线的水平角是(B)的夹角。
A.这两条直线的实际;B.这两条直线在水平面的投影线C.这两条直线在同一竖直上的投影D.这两条直线在某一倾斜面的投影线7、通过经纬仪竖轴的同一竖直面内不同高度的点在水平度盘上读取的读数是(D)。
A.点位越高,读数越大B.不相同C.点位越高,读数越小D.相同8、当经纬仪竖轴与目标点在同一竖面时,不同高度的水平度盘读数(A)。
A.相等B.不相等C.有时不相等D.不能确定9、经纬仪横轴不垂直竖轴时,望远镜旋转视准面为(B)。
A.铅锤面B.倾斜面C.竖直面D.水平面10、测水平角时,水平度盘与指标的运动关系是(A)。
A.水平度盘不动,指标动B.指标不动,水平度盘动C.水平度盘和指标都动D.指标和水平度盘都不动11、观测水平角时,照准不同方向的目标,应如何旋转照准部?(A)A.盘左顺时针,盘右逆时针方向B.盘左逆时针,盘右顺时针方向C.总是顺时针方向D.总是逆时针方向12、观测水平角时,盘左应(A)方向转动照准部。
A. 顺时针B. 由下而上C. 逆时针D. 由上而下13、经纬仪安置时,管水准器的作用是使仪器的( C )。