注塑机双肘杆合模装置的设计
- 格式:doc
- 大小:25.00 KB
- 文档页数:3

双曲肘合模机构原理嘿,朋友们!今天咱来唠唠双曲肘合模机构原理。
你看啊,这双曲肘合模机构就像是一个特别厉害的大力士!它的工作原理呢,其实并不复杂,但却超级重要。
想象一下,它就像一个经验老到的武林高手,每一个动作都精准无比。
它的肘节部分啊,就像是高手的关节,灵活又有力。
当它开始工作的时候,就仿佛是高手在施展绝世武功,那力量的传递和转换,真的是太神奇啦!在注塑机里呀,双曲肘合模机构可是起着至关重要的作用呢。
它要把模具紧紧地合在一起,就好像是给模具一个温暖又有力的拥抱,让它们严丝合缝,这样才能生产出完美的塑料制品呀。
它是怎么做到的呢?就像是拔河比赛一样,两边一起用力,互相配合。
双曲肘合模机构的各个部件协同工作,把力量从这边传到那边,再从那边传到这边,来来回回,就把模具合得牢牢的啦。
这其中的巧妙之处,真的让人惊叹不已啊!要是没有它,那注塑机可就没法好好工作啦,那我们生活中的好多塑料制品说不定就没法出现了呢,那该多可惜呀!而且哦,这双曲肘合模机构还特别耐用呢。
就像一个身经百战的战士,不管遇到什么困难,都能坚强地应对。
它能承受很大的压力和力量,长时间地工作也不会轻易出问题。
它的稳定性也是杠杠的!不会轻易地晃动或者出故障,就像是一座稳稳的大山,给人一种特别可靠的感觉。
咱再想想,要是双曲肘合模机构不稳定,那生产出来的塑料制品不就质量参差不齐啦?那可不行呀,我们要的是高质量的产品呀!总之呢,双曲肘合模机构原理虽然看似复杂,但只要我们仔细去了解,就会发现它真的很有趣,也很重要。
它就像是注塑机的心脏一样,为整个生产过程提供着强大的动力和支持。
所以啊,我们可不能小瞧了它,要好好地爱护它、利用它,让它为我们的生活创造出更多更美好的东西呀!这双曲肘合模机构,真的是太了不起啦!原创不易,请尊重原创,谢谢!。
合模装置的设计2肘杆式合模装置是利用各种形式的肘杆机构,在合模时,使合模系统形成预应力,进而对模具实现锁紧的一种合模装置。
例如图13所示的单曲肘机构,当压力油进入油缸的活塞杆端,使活塞下移,从而带动肘杆机构并推动模板向前运动。
当运动至图(13-2a)所示状态时,即模具的分型面刚接触,而肘杆机构尚未成一线排列时,动模板将受到变形阻力的作用,只有在合模油缸的工作油继续升压,并足以克服系统的变形阻力,才能使肘杆成为图(13b)所示的一线排列。
此时,合模系统因发生弹性变形(△lp)而对模具实现预紧,此预紧力pcm即为合模力。
当肘杆机构伸直并对模具实现预紧后,即使工作油的压力卸去,只要合模系统保持着原变形,其合模力是不会随之改变的。
在模具合紧后,如所有受力构件都遵守胡克定律以及不考虑接触点处的非线性变形,则受拉力作用的构件(即拉杆)的变形应为:△lp=3.2调模装置的选择在注塑机合模部分的技术参数中,存有最小模厚和最轻模厚。
调模装置就是用作调节移动模板和前紧固模板之间的距离,以适应环境不必的模具厚度。
对于液压――曲肘式合模装置来说,调模装置也就是调整再分模力的装置。
对调模装置的要求是调模要方便,便于操作;轴向位移准确、灵活、受力均匀;安全可靠,调节行程应有限位和过载保护措施。
目前,使用的调模装置形式很多,常见的几种形式有:1将颤抖模板设计成与两块女团出来的板,其厚度(h)调节器。
2将肘杆设计成长度可调的形式。
3将整个肘杆机构设计成轴向边线可移动的结构。
本次设计选用形式1的调模装置,其结构如图3-7。
此结构的动模板是由左、右两块并用螺纹方式连接起来,通过旋动调节螺母,使动模板厚度b发生变化,从而实现模具高度和合模力的调整。
其特点是调模比较方便,但增加了模板和机器的长度,此式多用于中小型机器上。
图3-7调模装置3.3挖空装置的设计为了取出模内制品,在各类的合模装置上均需设置顶出装置。
顶出装置设计是否完善,将对制品质量和产量都有较大影响。
注塑机设计中的合模机构设计案例综述目录1.1合模装置简述 (1)1.2合模类型的确定 (1)1.3肘杆机构设计方案 (2)1.1.1 肘杆机构的运动分析 (2)各个肘杆受力 (3)1.1.2 肘杆机构力的放大倍 (4)1.1.3 机构变形力及其与机构移模力之间的关系计算 (4)1.4对合模装置进行工况分析 (6)(1)合模油缸负载 (6)(2)顶出油缸负载 (6)(3)油缸几何尺寸的确定 (6)1.5顶出装置 (7)(3)力量足够,速度适中。
(7)(1)机械顶出 (7)(2)液压顶出 (7)1.6主要零件的设计校核 (7)1.6.1 模板强度计算 (7)1.6.2 拉杆的设计与校核 (10)1.6.3 拉杆螺母 (11)1.7调模装置 (12)1.7.1 调模装置的结构选择 (12)1.7.2 链条的设计计算 (12)1.1合模装置简述合模装置可以保证模具的开合和闭合,并且可以使注塑成型的制成品从模具上被顶出脱落。
所以,合模装置决定着制成品的质量。
一个合格的合模装置,对力、速度和安装模具等方面有很高的要求1.2合模类型的确定合模部分是注塑机系统的重要组成部分,一般是由定模具、动模具,和顶出装置组成的。
定模具与料筒相连是固定不动的。
动模具依靠电机带动,在注射进行的过程中,先由动模具与定模具相结合形成密闭的模具腔室,然后注射融化的物料进入腔室中在高压的作用下形成成品雏形。
然后经过保温降压、降温保压等一系列过程形成成品。
合模装置大致可以分为三种而每一种又能够分成多种形式。
一个好的和睦合模装置需要有一定的硬度和刚度保证在注射过程中自身不会被损坏并且要保证有良好的密闭性保证在高压下融化的物料不会沿着缝隙溢出。
模具装着还要有相当的路程来使得定模具可以来回运动。
在运动过程与注射过程相互配合。
即在动模具开始的行动时速度要快,然后再注射过程中的速度要缓慢,而后脱模时速度要快,形成快慢快的运动行进形式。
1.3肘杆机构设计方案 1.1.1 肘杆机构的运动分析(1)肘杆机构尺寸的确定 ①定L2为430mm 。
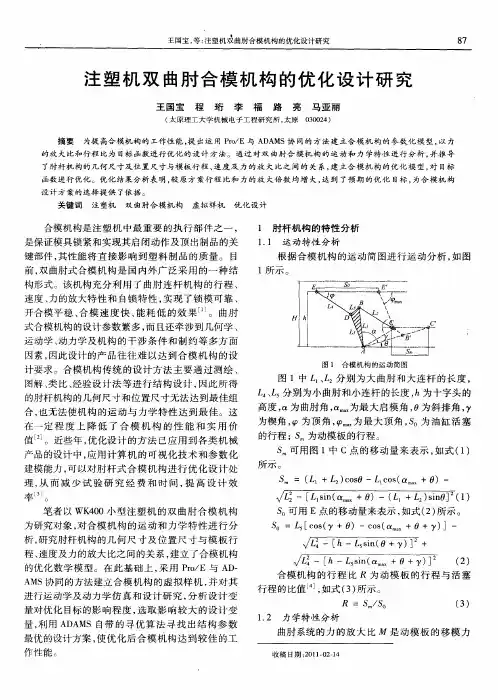
注塑机双肘杆合模装置的设计摘要:注塑机合模装置是保证成型模具可靠的闭紧和实现模具启闭动作及顶出制品的部件。
其性能好坏,直接关系到成型制品的质量和数量。
一个比较完善的合模装置,必须满足在规定的注射量范围内,对力、速度、安装模具与取出制品时空间位置的要求。
本文就当前国内外中小型注塑机使用最广泛的双肘杆合模装置的设计进行讨论。
关键词:注塑机合模装置双肘杆设计1.引言注塑成型之所以能够高速发展,其重要原因是性能优异螺杆式注射装置的出现;而合模装置则相反,成了注射成型机发展过程中急需解决的一个重要问题。
为了提高机器的加工能力和效率,而需发展相应的合模装置,实现其大合模力、高速、低能耗、安全可靠、结构简单和重量轻等方面的要求。
目前合模装置在结构类型上,也远比注射装置多。
2.肘杆式合模装置的工作原理肘杆式合模装置是利用各种形式的肘杆机构,在合模时,使合模系统形成预应力,进而对模具实现锁紧的一种合模装置。
如图1所示,为对称五孔斜排列双曲肘机构的简图,其工作原理:当压力油进入移模油缸的后端,使活塞前移,从而带动肘杆机构并推动模板向前移动;当动模板继续移动,直至模具的分型面刚刚接触,而肘杆机构尚未成一线排列时,动模板将受到变形阻力的作用;当移模油缸为克服变形阻力而继续升压后,最终合模机构和模具便克服系统的变形阻力,使肘杆成为如图所示的一线排列。
此时,合模系统因发生弹性变形()而对模具实现预紧,此预紧力即为合模力。
当肘杆机构伸直并对模具实现预紧后,即使工作油的压力卸去,只要合模系统保持着原变形,其合模力是不会随之改变的,此时机构实现自锁。
3.肘杆式合模装置的运动分析式中XCmax为闭模最终位置,XXmin闭模启始位置,λ为前、后肘杆的长度比(L1/L2).从上式可知,肘杆机构的行程是随λ(/ )或增大而增加。
可是,后连杆是由模板尺寸所决定,一般均不超过1/2V(模板高度)。
而肘杆的起始角(或)也受到附加运动条件的限制。


1080T注塑机合模结构优化与设计******************************************************摘要:最近几年,我们国家的各个行业都在发展,我们国家的经济也在提高。
所以,有关部门也加强了对与之有关的机器装备的研发,以适应行业发展的需要,从而推动了我们的现代化社会的稳步发展。
在行业发展中,注射成型设备所占的比例很大,它有很多的优势,对于塑胶产品的制造可以实现高产量,高效率,并且制造费用低廉;对于具有高精度的塑胶产品,可以利用模具的设计、制造,以及对注塑机的准确的运行与合理的使用,来达到模具的成形操作等方面的需求,进而为各个行业的发展,提供高品质的塑胶产品,这就凸显了注塑机在行业发展过程中的重要性。
关键词:注塑机;合模装置;结构;优化引言:注塑机,又被称为注射机;不管是对热塑性树脂,或者对热固性树脂,再加上对塑料制品的制造模具,都可以一次完成具有复杂结构、满足一定尺寸公差的塑料产品,它属于工业生产中的一种主要的机械设备。
其中,合模机构是组成注射成型设备的一个重要工作部件,它起着对开启、锁定、闭合等作用;在合模机构锁模的时候,两模具已经出现了接触,在此情况下,由于驱动系统持续地对合模机构进行动力,导致了整个合模系统的弹性变形,进而形成了一个夹紧力,为模具提供了足够的锁模力。
一、合模装置在注塑机中的作用在注射过程中,合模设备的工作过程,是注射过程中,合模注入、保压冷却、预塑化、产品脱落等工作过程中的一个关键步骤。
合模成形工作的优劣也是决定注塑产品的重要环节,在此工序中,一组成形模结合的坚实可靠性,模启动结合的弹性,以及成品制件脱模、取出的方便安全性,都要通过合模装置中准确、可靠的动作来确保。
注塑机合模装置结构分析模具合模装置有很多种,在塑胶产品生产中,模具合模装置主要有两种:曲柄式合模装置和全液压直接压力合模装置。
(一)曲臂型模具夹紧机构根据曲柄连杆式机械合模设备的传动模式,其传动模式分为两种,一种是由液压传动模式带动的水力曲柄连杆式和由伺服电动机带动的电子曲柄连杆。
双曲肘合模装置动力学计算的实验论证在双曲肘合模装置中,样品被放置在两个束缚臂之间,其中一个束缚臂连接到一个固定的支撑点,另一个束缚臂连接到一个可移动的夹具。
通过改变夹具的位置,可以施加不同大小的力来加载样品。
1.将样品安装在双曲肘合模装置上,并确保样品与装置的接触良好。
2.开始加载样品,记录夹具位置的初始值,并在每个加载级别上记录夹具位置的变化。
3.使用合适的测量设备(如位移传感器或应变计)测量夹具位置的变化,并记录所得到的数据。
4.根据加载级别的大小计算应变,并将其与夹具位置的变化相对应。
5.绘制应变-额定位移曲线,并利用曲线的斜率确定装置的刚度。
接下来,我们将进行加载多个样品的实验,以研究材料的塑性行为。
具体步骤如下:1.准备多个相同尺寸和形状的样品,并确保它们都安装在相同的双曲肘合模装置上。
2.分别加载每个样品,记录夹具位置的变化以及与之相关的应变。
3.根据加载级别和样品的初始尺寸计算应力,并将其与应变相对应。
4.绘制应力–应变曲线,并观察材料的塑性行为。
最后,我们将进行疲劳测试实验,以研究材料的寿命。
1.准备一个样品,并将其安装在双曲肘合模装置上。
2.开始进行循环加载实验,每次加载后记录夹具位置的变化和所施加的力。
3.根据加载级别计算应变,并将其与夹具位置的变化相对应。
4.当样品出现裂纹或损坏时停止实验,并记录样品的循环次数。
5.利用获取的数据绘制应力-循环次数曲线。
6.根据应力-循环次数曲线,计算出材料的循环寿命。
通过进行以上实验,我们可以通过双曲肘合模装置来测量材料的动力学性质。
这将有助于我们更好地理解材料在应力-应变关系下的行为,从而为工程设计和材料选择提供依据。
注塑机双曲肘合模机构的设计1摘要注塑机关键是合模机构部分。
合模机构是注塑机最重要的机械部件,注塑机的合模机构形式很多,常用的机构主要可分三种:全液压式,液压-机械式,电子机械式。
液压机械合模机构是目前使用最为普遍的合模机构。
液压机械合模机构通常有移模液压缸和曲肘连杆两部分串联而成,习惯上也称为肘杆式合模机构。
在开合模过程中,这种机构能实现慢-快-慢的运动过程,提高了合模速度,节约了能耗并提高了效率[1]。
关键词:合模机构;双曲肘;开合模;液压2Design Of Clamping Machanism For Plastic Injection MachineStudent:Teacher:Abstract: Clamping mechanism is the Key part of the Injection molding machine. Clamping mechanism is the most important component of Injection molding machine, Clamping mechanism has many forms, but commonly used can be divided into three types: hydrostatic transmission, hydraulic-mechanical and electronic mechanical. Hydraulic mechanical is most widely used now. hydraulic-mechanical Clamping mechanism is always consist of Hydraulic cylinder and song cubits connecting rod. It also be called Cubits long pole type shut the mould institutions.In the process of combining a model , this mechanism can achieve slow -fast-slow ‘s speed movement process; improve the speed of spotting and it also can save energy consumption and Improve efficiency.Keyword: Clamping Mechanism; Hyperbolic cubits; Spotting; Hydraulic3目录摘要 (1)关键字 (1)1 前言 (1)1.1 液压技术的发展趋势 (1)1.2 注塑机的现状与发展 (2)1.3 研究意义 (3)1.4 国内外研究现状 (3)2 锁模装置 (4)3 合模装置的形式 (5)3.1 液压式合模装置 (5)3.1.1 直压式合模装置 (5)3.1.2 增压式合模装置 (6)3.1.3 稳压式合模装置 (6)3.1.4 充液式合模装置 (7)3.2 液压-机械式合模装置 (7)3.2.1 单曲肘合模装置 (7)3.2.2 双曲肘合模装置 (7)3.3 电动机械式合模装置 (8)3.4 液压式合模机构与液压-机械式合模机构的对比 (9)3.5 方案的确定 (10)4 各种可能方案的形成 (10)5 PT80B注塑机的设计参数 (11)6 铰链尺寸的确定 (12)7 铰链的受力分析 (13)47.1 L1的受力分析 (13)7.2 L2的受力分析 (14)7.3 L3的受力分析 (14)8 机械保险装置 (15)9 锁模装置中关键受力部件的强度校核 (15)9.1 关键受力部件的强度校核 (15)9.1.1 机铰部分强度校核 (15)9.1.2 四根拉杆 (16)9.1.3 大锁轴、小锁轴 (16)9.1.4 模板 (19)9.1.5 顶出活塞杆 (19)9.1.6 主/副顶出杆 (19)10 结论 (20)参考文献 (20)致谢 (20)51 前言1.1 液压技术的发展趋势液压传动作为一种传动方式,由于具备功率密度高,结构小巧,配置灵活,组装方便,可靠耐用等独到的特点,已成功地用于一切需要中等以上功率输出,且需对运动过程进行灵活控制和调节的地方,是现代化传动与控制的关键技术之。
文章编号:1005-2895(2001)04-0033-03XS -ZY -120A 塑料注射成型机合模装置的设计高秀兰 (宝鸡文理学院机械工程系,陕西宝鸡721007) 摘 要:介绍了XS -Z Y -120A 型塑料注射成型机合模装置的设计,主要包括其主要功能结构、工作原理、模板距离调节机构、推出机构及其液压系统,并分析了其优缺点。
关 键 词:塑料注射机;液压—单曲肘合模装置;推出机构中图分类号:T Q 320.66+2 文献标识码:B收稿日期:2001-07-02作者简介:高秀兰(1965-),女,陕西扶风县人,宝鸡文理学院讲师,工学学士,主要研究方向为机械设计,CA D/CA M.1 引 言在塑料注射成型机中,合模装置的设计是否合理,关系到成型模具能否可靠地闭锁、开启;方便、可靠地取出塑料制品;以及塑料注射成型机生产率的提高。
可见,合模装置的设计在塑料注射成型机的设计中占据着比较重要的地位。
2 XS -ZY -120A 型塑料注射成型机的工作原理注射成型机的示意图如图1所示。
注射成型机的注射过程由三个阶段组成:呈粒状的塑料原料被输送机送到料斗9中,再落入料斗出口处的螺杆8内,然后被螺杆连续均匀地向前输送。
螺杆在输送物料的过程中,逐渐压实物料,并在料筒外加热和螺杆剪切热的作用下,将物料加热到粘流态。
粘流态的塑料被螺杆推送到螺杆头部积聚,压力逐渐升高。
当此压力升高到一定值时,压力阀换向,注射油缸11的活塞退回,带动螺杆后退,对螺杆头部物料进行计量。
螺杆退回到一定位置,其头部的熔料增多到所需的注射量时,限位开关动作,使螺杆停止后退和转动,预塑完毕。
同时,合模机构在合模油缸的推动下移动动模5使模具闭合,整个注射座也前移,使喷嘴对准模具的主浇道口。
然后,注射油缸切换,带动螺杆按要求的注射压力和注射速度将熔料注入到模腔内。
注射完毕,就完成了第一阶段工作。
第二阶段是保压。
在熔料充满模腔后,螺杆仍然不图1 注射成型机示意图1-顶杆固定板 2-顶出底板 3-动模安装板4-顶杆 5-动模 6-定模 7-定模安装板8-螺杆 9-料斗 10-电机 11-注射油缸停地转动,不断向模腔内补充制品冷却收缩所需要的物料,保持熔料一定的压力,防止模腔中熔料可能产生的反流。
注塑机双肘杆合模装置的设计
摘要:注塑机合模装置是保证成型模具可靠的闭紧和实现模具启闭动作及顶出制品的部件。
其性能好坏,直接关系到成型制品的质量和数量。
一个比较完善的合模装置,必须满足在规定的注射量范围内,对力、速度、安装模具与取出制品时空间位置的要求。
本文就当前国内外中小型注塑机使用最广泛的双肘杆合模装置的设计进行讨论。
关键词:注塑机合模装置双肘杆设计
1.引言
注塑成型之所以能够高速发展,其重要原因是性能优异螺杆式注射装置的出现;而合模装置则相反,成了注射成型机发展过程中急需解决的一个重要问题。
为了提高机器的加工能力和效率,而需发展相应的合模装置,实现其大合模力、高速、低能耗、安全可靠、结构简单和重量轻等方面的要求。
目前合模装置在结构类型上,也远比注射装置多。
2.肘杆式合模装置的工作原理
肘杆式合模装置是利用各种形式的肘杆机构,在合模时,使合模系统形成预应力,进而对模具实现锁紧的一种合模装置。
如图1所示,为对称五孔斜排列双曲肘机构的简图,其工作原理:当压力油进入移模油缸的后端,使活塞前移,从而带动肘杆机构并推动模板向前移动;当动模板继续移动,直至模具的分型面刚刚接触,而肘杆机构尚未成一线排列时,动模板将受到变形阻力的作用;当移模油缸为克服变形阻力而继续升压后,最终合模机构和模具便克服系统的变形阻力,使肘杆成为如图所示的一线排列。
此时,合模系统因发生弹性变形()而对模具实现预紧,此预紧力即为合模力。
当肘杆机构伸直并对模具实现预紧后,即使工作油的压力卸去,只要合模系统保持着原变形,其合模力是不会随之改变的,此时机构实现自锁。
3.肘杆式合模装置的运动分析
式中XCmax为闭模最终位置,XXmin闭模启始位置,λ为前、后肘杆的长度比(L1/L2).
从上式可知,肘杆机构的行程是随λ(/ )或增大而增加。
可是,后连杆是由模板尺寸所决定,一般均不超过1/2V(模板高度)。
而肘杆的起始角(或)也受到附加运动条件的限制。
在实际结构设计中,应尽可能缩短前连杆的长度,一般λ(L1/L2)取值在0.7-0.85之间,这样可以避免动模板运动时产生过大的垂直分力而增加摩擦。
双肘杆合模机构的模板运动速度从合模开始到结束始终是变化的,机构的模
板速度图可用解析法或图解法做出工程中多用简捷的图解法。
如图2所示,从合模开始,速度由零很快上升到最高速度,以后又逐渐减慢,终止时速度为零,合模力则迅速上升到锁模的最大值。
这正好符合模装置的要求。
同样,开模过程中模板的运动速度也是变化的,但与上述相反。
这就是双肘杆机构的运动特性,也是肘杆机构最突出的优点。
4.肘杆机构力的放大能力
对称排列的双肘杆合模机构,具有较大力的放大特性,以力的放大倍数表示机构在合模过程中的移模力与油缸推力之间的关系。
双曲肘机构力的放大倍数
从上式可以看出,机构力的放大倍数随减小及和角的增加而增大。
而动模板的速度则相反,随的增大和角的减小而增大。
因此,机构的力的放大和速度之间的关系是相互矛盾的。
在设计时要根据具体条件,试用多种结构方案,在同一方案中又经多组参数的试算,再经结构设计的比较,才能最后选定一个比较合适的肘杆机构。
一般情况下,力的放大倍数取值在20-40之间。
在双曲肘设计时,如若结构允许,应尽可能的缩短中间杆(推力杆)的长度和后连杆两孔的距离。
后连杆夹角通常取70°~90°。
这样设计的肘杆系统具有比较合适的开模力和整个机构的外形尺寸。
杆长比一般等于0.75~0.85,角在合紧位置时为75°~85°。
目前肘杆的布置,在合模力较大的双曲肘机构上,经常采用对称斜排列形式,倾斜角一般取为4°~6°。
这样可以在略加大后模板尺寸的情况下,得到较大的模板行程,而对力的放大和移模速度的特性不会产生明显的变化。
5.合模机构对能耗的影响
目前由于注塑机在注射装置上普遍采用了螺杆式,所以在注射参数接近的情况下,其能耗也是较接近的。
因此,合模装置在很大程度上决定着机器的总能耗。
肘杆机构因具有力的放大作用,使用的油缸直径远小于液压式,其合模力又是以机构预变形来实现,即使卸去油泵动力,也能锁紧模具。
液压式则因工作周期大和工作油需要量大,用于工作油发热,漏损,压缩和保持合模力等方面的能耗远大于肘杆式。
例如合模力为600吨力左右的机器,肘杆式合模的机器总功率约为120~140千瓦(工作油量在500升左右);直压式机器总功率却为170~180千瓦(工作油量2500升左右)。
结语:
塑料注射成型机是将热塑性塑料或热固性塑料制成各种塑料制件的主要成型设备。
随着现代工业和尖端科技的发展,塑料制件愈来愈广泛地应用到各个领域;其中注射成型制件占有相当大的比例。
螺杆式注射装置,至今仍几乎被一致公认为是当前性能最优越的注射装置,几十年来结构上没有发生多少变化;而合
模装置在结构上尚存在许多有待改进的问题,先进合模装置的研制,是注射成型技术进一步发展的重要课题。
本文就五孔斜排列双曲肘合模装置的设计进行讨论,具有一定的现实意义。
参考文献:
[1]北京化工学院、天津轻工学院主编《塑料成型机械》中国轻工业出版社1982.1
[2]《常见机构的原理与应用》本书编写组。
机械工业出版社1978.10
[3]黄灿军.注塑机合模装置的技术及研究进展[J].广东塑料,2012(21):146-148.。