理论力学:第13章 虚位移原理及分析力学基础
- 格式:pdf
- 大小:489.34 KB
- 文档页数:10
第13章 虚位移原理及分析力学基础也称虚功原理。
在固体力学、结构力学中应用较多。
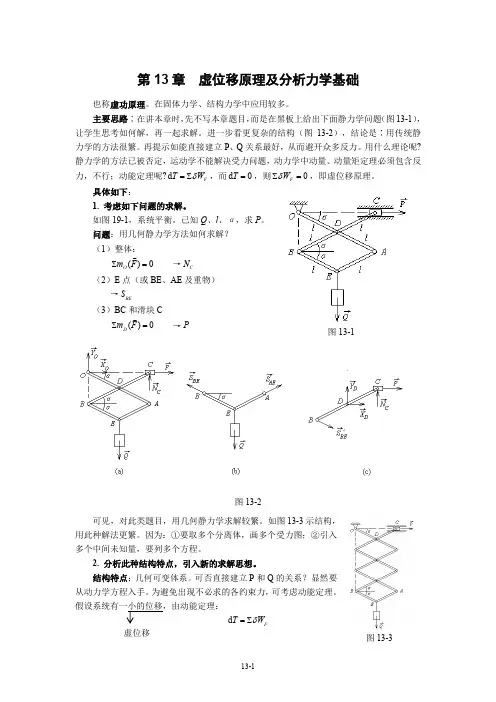
主要思路∶在讲本章时,先不写本章题目,而是在黑板上给出下面静力学问题(图13-1),让学生思考如何解,再一起求解。
进一步看更复杂的结构(图13-2),结论是∶用传统静力学的方法很繁。
再提示如能直接建立P 、Q 关系最好,从而避开众多反力。
用什么理论呢?静力学的方法已被否定,运动学不能解决受力问题,动力学中动量、动量矩定理必须包含反力,不行;动能定理呢?d F T W δ=∑,而d 0T =,则0F W δ∑=,即虚位移原理。
具体如下:1. 考虑如下问题的求解。
如图19-1,系统平衡。
已知Q 、l 、α,求P 。
问题:用几何静力学方法如何求解? (1)整体:()0O m F ∑=→C N (2)E 点(或BE 、AE 及重物)→BE S(3)BC 和滑块C()0D m F ∑=→P图13-2可见,对此类题目,用几何静力学求解较繁。
如图13-3示结构,用此种解法更繁。
因为:①要取多个分离体,画多个受力图;②引入多个中间未知量,要列多个方程。
2. 分析此种结构特点,引入新的求解思想。
结构特点:几何可变体系。
可否直接建立P 和Q 的关系?显然要从动力学方程入手。
为避免出现不必求的各约束力,可考虑动能定理。
假设系统有一小的位移,由动能定理:d F T W δ=∑图13-1图13-3虚位移由于系统平衡,动能无变化,d 0T =,则0F W δ∑= → 虚功方程此方程中只包含P 和Q ,故建立了简单的方程,可求P 。
此便是虚位移原理的思想。
严格建立虚位移原理,需有诸多基本概念。
13.1 约束 约束的运动学分类静力学中讲的约束——约束的力的性质(约束的力的方面),用约束力表示,常指物体; 此处讲的约束——约束的运动的性质(约束的运动的方面),用约束方程表示,指限制条件。
一、 约束和约束方程自由质点系:运动不受任何限制。
非自由质点系:运动受到限制——约束。

第十三章 虚位移原理一、目的要求1. 束方程、理想 束和虚位移有清楚的 ,并会利用几何法、分析法和虚速度法找系 内各点虚位移之 的关系。
2.能正确地运用虚位移原理求解物系统的均衡 。
3. 自由度和广 坐 有初步的理解。
4.会用分析法和几何法 算广 力。
二、基本内容1.基本观点束、虚位移、虚功、虚位移原理、自由度和广 坐 。
2.主要公式:( 1)虚功W F r x x y y z z( 2)虚功方程(虚位移原理)nF ir i 01)几何法i 1 n ( x i x iy i y i z i z i ) 0 2)分析法i 1 ( 3)广 力的 算1)分析法n x i y i z iQ k i 1 X i q k Y i q k Z i q k k 1,2, , N2)几何法n W k i 1 Q k( 4)广 力表示的均衡条件Q 1=Q 2=⋯ =Q N =0 N 系 的自由度数三、要点和 点1.要点 ( 1)虚位移、理想 束的观点( 2) 用虚位移原理求解物系统的均衡( 3) 点系自由度数的判断及广 力的 算2. 点找虚位移之 的关系四、教课提示 q k ( 1) 清虚位移原理解决什么 ,以及 什么要学 本章内容。
( 2) 束、 束主程只作 介 ,熟 找虚位移之 关系的几何法、虚速度法与分析法,划分虚位移与 位移、虚功与 功。
( 3) 清虚功方程的几何与分析表达式,频频 例 明其解 特色, 特别注意方程中各符号确实定。
( 4) 用虚位移原理解 是以 点系整体 研究 象。
(5)讲清广义坐标、广义力与直角坐标、一般力的关系。
2.例题P298~305,P308~311,如例 13-1 ,13-2 ,13-3 ,13-4 ,13-5 ,13-6 ,13-7 包含了求均衡地点、主动力之间的关系、拘束反力(偶)的计算和内力的计算等各样静力问题。
3.作业:P313~316,习题 13-1 ,13-3 ,13-6 ,13-7 ,13-11 ,13-12 ,13-13 ,13-14 ,13-16 ,13-19 。

如何理解理论力学中的虚位移原理?在理论力学的广阔领域中,虚位移原理是一个极其重要的概念,它为解决力学问题提供了一种独特而有效的方法。
然而,对于许多初学者来说,理解虚位移原理可能会感到有些困惑。
那么,让我们一起来揭开它神秘的面纱,深入探讨如何理解这一重要原理。
首先,我们来明确一下什么是虚位移。
虚位移并不是实际发生的位移,而是在某一瞬时,质点或质点系在约束许可的条件下,设想的无限小位移。
它是一种假想的、符合约束条件的位移。
为了更好地理解,我们可以想象一个被绳子悬挂着的小球。
在某一时刻,如果我们假设小球可以在不破坏绳子约束的情况下有一个微小的位移,这个微小的位移就是虚位移。
那么,虚位移原理到底说了什么呢?简单来说,虚位移原理指出:对于一个受理想约束的质点系,其平衡的充分必要条件是,作用于质点系的所有主动力在任何虚位移上所做的虚功之和等于零。
这听起来可能有点抽象,让我们通过一个具体的例子来解释。
假设我们有一个由两个质点通过一根轻质刚性杆连接的系统,放在光滑的水平面上。
质点 A 受到一个水平向右的力 F₁,质点 B 受到一个水平向左的力 F₂。
如果这个系统处于平衡状态,根据虚位移原理,我们可以假设质点 A 有一个向右的虚位移δr₁,质点 B 有一个向左的虚位移δr₂。
由于杆是刚性的,所以两个质点的虚位移之间存在一定的关系。
那么,主动力 F₁和 F₂在相应的虚位移上所做的虚功之和F₁·δr₁ F₂·δr₂就等于零。
虚位移原理的重要性在于它为解决静力学问题提供了一种统一的方法,避免了分别对每个物体进行受力分析和列平衡方程的繁琐过程。
通过虚位移原理,我们可以直接从系统的整体出发,找到力与虚位移之间的关系,从而快速确定系统是否平衡以及未知力的大小。
理解虚位移原理还需要注意一些关键的要点。
首先是理想约束的概念。
理想约束是指约束力在虚位移上所做的虚功之和为零的约束。
常见的理想约束包括光滑接触面、光滑铰链、不可伸长的绳索等。
虚位移原理虚位移原理提供了静力学问题的一种全新的解法,它还是分析力学的基础。
虚位移原理是设计用来消除平衡方程中的约束力,主要是用来求解平衡系统的主动力之间的关系或平衡位置。
另外,通过解除约束,将内力或约束力转化为主动力,则虚位移原理也可用来求解内力和约束力,而且这比以前的列平衡方程的常规方法更有效。
一、力的功元功:力在微小位移上所做的功称为元功。
其数学表达式为:t d W v F ∙=δ或r F d W ∙=δ,其中v 和r d 分别为力F 作用点的速度和微小位移。
变力在曲线路径上做的功可以用曲线积分计算。
等效力系做功定理: 等效力系在刚体的位移上所做的功相等。
即:若},,{},,{11m P P F F n =,则∑∑===mj jn i i P W F W 11)()(。
在计算力的功时,为计算方便,可以利用上述定理。
例如:图4-1(a)所示鼓轮上缠绕有柔索,在力F (大小和方向不变)作用下在地面上纯滚动。
计算在轮心沿直线移动S 距离过程中力F 所做的功。
(a) (b) 图4-1由于力F 的作用点的位移不易计算,我们可将F 平移到轮心,同时附加一力偶M (其力偶矩的大小为=M Fr ,如图4-1b 所示)以保持力系等效,即},{}{M F F =。
新的力系},{M F 在轮心沿直线移动S 距离过程中所作的功较易计算:ϕθM FS W +=cos ,其中:ϕ为圆盘轮心移动S 距离时,圆盘转动的角度,即RS =ϕ,于是上式可写成cos SW FS Fr R θ=+⋅ 它等于在轮心沿直线位移S 距离过程中力F 所做的功。
返回主目录二、约束及其分类约束:对质点或质点系运动所加的限制。
如某质点被限制在固定曲面上运动,则该质点就是受到了约束。
约束体对被约束体的运动是通过力的作用(称为约束力)来加以限制的,但是约束与受力是应区别对待的两个不同概念,这可以通过下面的例子来区分.(a)(b) (c)图4-2对图4-2中所示的系统:在(a)中,质点A 被固定在刚性杆上并球铰链连接接在固定点o 。
第13章 虚位移原理及分析力学基础也称虚功原理。
在固体力学、结构力学中应用较多。
主要思路∶在讲本章时,先不写本章题目,而是在黑板上给出下面静力学问题(图13-1),让学生思考如何解,再一起求解。
进一步看更复杂的结构(图13-2),结论是∶用传统静力学的方法很繁。
再提示如能直接建立P 、Q 关系最好,从而避开众多反力。
用什么理论呢?静力学的方法已被否定,运动学不能解决受力问题,动力学中动量、动量矩定理必须包含反力,不行;动能定理呢?d F T W δ=∑,而d 0T =,则0F W δ∑=,即虚位移原理。
具体如下:1. 考虑如下问题的求解。
如图19-1,系统平衡。
已知Q 、l 、α,求P 。
问题:用几何静力学方法如何求解? (1)整体:()0O m F ∑=→C N (2)E 点(或BE 、AE 及重物)→BE S(3)BC 和滑块C()0D m F ∑=→P图13-2可见,对此类题目,用几何静力学求解较繁。
如图13-3示结构,用此种解法更繁。
因为:①要取多个分离体,画多个受力图;②引入多个中间未知量,要列多个方程。
2. 分析此种结构特点,引入新的求解思想。
结构特点:几何可变体系。
可否直接建立P 和Q 的关系?显然要从动力学方程入手。
为避免出现不必求的各约束力,可考虑动能定理。
假设系统有一小的位移,由动能定理:d F T W δ=∑图13-1图13-3虚位移由于系统平衡,动能无变化,d 0T =,则0F W δ∑= → 虚功方程此方程中只包含P 和Q ,故建立了简单的方程,可求P 。
此便是虚位移原理的思想。
严格建立虚位移原理,需有诸多基本概念。
13.1 约束 约束的运动学分类静力学中讲的约束——约束的力的性质(约束的力的方面),用约束力表示,常指物体; 此处讲的约束——约束的运动的性质(约束的运动的方面),用约束方程表示,指限制条件。
一、 约束和约束方程自由质点系:运动不受任何限制。
非自由质点系:运动受到限制——约束。
这种限制条件用数学方程表示即约束方程。
二、 约束的运动学分类从三方面理解:概念、实例和约束方程。
常有以下分类方法: 1. 几何约束和运动约束几何约束——只限制质点或质点系在空间的位置,约束方程为位置坐标的代数方程(不含位置坐标的导数); 单摆:222x y l += 曲柄连杆机构:222222,()()A A B A B A B x y r y x x y y l +==-+-=运动约束——除位移方面的限制外,还有速度或角速度方面的限制,约束方程为位置坐标的微分方程(或速度、角速度及位置坐标的代数方程,显含位置坐标的导数)。
滚子纯滚动:,O O y r v r ω== 2. 定常约束和非定常约束定常约束——约束方程中显含时间t ;(如前) 非定常约束——约束方程中不显含时间t 。
变摆长单摆:22200()x y l v t +=- 3. 完整约束和非完整约束完整约束——约束方程中不包含坐标对时间的导数,或虽包含,但可积(转换为有限形式);(如前)非完整约束——约束方程中包含坐标对时间的导数,且不可积。
二质点追踪问题:A B A A B A yy y xx x -=- 4. 双面约束(固执约束)和单面约束(非固执约束)双面约束(固执约束)——不仅能限制质点沿某一方向的运动,还能限制相反方向的运动,约束方程为等式方程; 如前单摆、曲柄连杆机构中的滑块。
单面约束(非固执约束)——只能限制质点沿某一方向的运动,约束方程为不等式方程。
绳连单摆:222x y l +≤此处只讨论完整、定常、几何、双面约束(或具有双面约束性质的单面约束),其约束方程可用含各质点直角坐标的代数方程表示。
13.2 自由度 广义坐标一、 自由度具有完整约束的质点系,确定其位置的独立坐标数,称为自由度或自由度数。
自由度的计算: 1. 以质点作为基本单元质点系有n 个质点,s 个约束,则自由度k=3n-s (空间)或k=2n-s (平面) 2. 以刚体作为基本单元刚体系有N 个刚体,s 个约束,则自由度k=6N-s (空间)或k=3N-s (平面) 注:包含质点和刚体的质点系的自由度,可结合两种算法计算。
实用方法:对自由度较少的质点系,可按下述方法确定:固定质点系中任意质点或刚体的任一方向的运动,若其他质点和刚体都不会运动,则自由度为1;固定质点系中任意质点或刚体的任二方向的运动,若其他质点和刚体都不会运动,则自由度为2;依次类推。
二、 广义坐标确定质系位置的独立参变量,称为广义坐标。
可为任意坐标,如直角坐标和非直角坐标。
完整约束下,广义坐标数=自由度数目。
引入广义坐标的意义:用直角坐标和约束方程确定质点系的运动: 3n 个坐标:i i i x y z ,,,1,2,,i n = s 个约束方程:(,,)0i i i i f x y z =,1,2,,j s = 若用广义坐标表示:只有k=3n-s 个广义坐标:1,2,,3h q h k n s ==- , 所有直角坐标可用广义坐标表示: 121212(,,,)(,,,) 1,2,,(,,,)i i k i i k ii k x x q q q y y q q q i n z z q q q =⎧⎪==⎨⎪=⎩ 或12(,,,) 1,2,,i i k r r q q q i n ==13.3 虚位移 虚功一、 虚位移在给定位置上,质点或质点系在约束所容许的条件下可能发生的任何无限小位移,称为质点或质点系的虚位移。
虚位移与实位移的比较:虚位移实位移1. 为约束所容许 1. 为约束所容许2. 总为无限小2. 可以是有限值3. 只与约束条件有关,与力、时间、初条无关,是一个纯粹的几何概念 3. 除与约束条件有关外,尚与力、时间、初条有关4. 一个位置下可以有几组虚位移4. 一个位置下,所能实现的实位移只有一组5. 定常约束中,实位移是虚位移中的一组;非定常约束中,实位移可不同于虚位移(应加实例及图) 二、 虚位移的求法 1. 解析法(变分法)12(,,,) 1,2,,i i k r r q q q i n ==则1 1,2,,k i i h i hr r q i n q δδ=∂==∂∑(13-6)一般写直角坐标系下坐标的变分,求质点沿直角坐标轴方向的虚位移,注意求出的是代数量。
注:虚位移对应数学上的变分(等时变分)——与时间无关,实位移对应数学上的微分——与时间有关。
例:曲柄连杆机构 cos ,sin A A x r y r φφ==,sin ,cos A A x r y r δφδφδφδφ=-=sin sin r l φθ=,cos cos r l φδφθδθ=,cos cos r l φδθδφθ=cos cos B x r l φθ=+,sin sin (sin cos tan )B x rl r δφδφθδθφφθδφ=--=-+例1 (13-3)双摆解:写出A A B B x y x y 、、、(用12φφ、表示),求变分。
2. 几何法(运动分析法) 例 2 曲柄连杆机构 选ϕ为广义坐标。
OA 杆:A r OA δδφ=⋅ AB 瞬心在I :ABr r AIBIδδδθ==所以,B A BI BIr r OA AI AIδδδφ==⋅ 三、 虚功力在虚位移上所做的功称为虚功。
力:cos W F r F r X x Y y Z z δδδθδδδ=⋅==++或 ()P W m F δδφ= ()P m F 指力F对轴或瞬心P 之矩,特别对刚体此式常用 力偶:W m δδφ=例3 (补)曲柄连杆机构,求各主动力之虚功。
解1:几何法 设系统虚位移如图。
力偶M :M W M δδφ= 力F :F B W F r δδ=-力G :()cos 2F I lW m G G δδθθδθ=-=-解2:变分法建立图示坐标系。
选ϕ为广义坐标。
力偶M : M W M δδϕ= 力F :cos cos B x r l φθ=+ 而sin sin r l φθ=cos cos r l ϕδϕθδθ=cos cos r l ϕδθδϕθ=sin sin (sin cos tan )B x r l r δϕδϕθδθϕϕθδϕ=--=-+(sin cos tan )F B W F x Fr δδϕϕθδϕ==-+ 力G :sin sin 2C ly r φθ=-cos cos cos 22C l ry r δϕδϕθδθϕδϕ=-=cos 2G C rW G y G δδϕδϕ=-=-例: 求摩擦力的虚功。
F W F r δδ=-⋅ F W F r δδ=-⋅提问:是否正确——摩擦力与虚位移无关! 正确解法:解1:设物块虚位移沿斜面向下,则摩擦力向上。
摩擦力虚功: 解2:设物块虚位移沿斜面向上,则摩擦力向下。
摩擦力虚功:解:设物块虚位移沿斜面向上 ,则摩擦力虚功F W F r δδ=⋅13.4 理想约束动能定理中曾提过,此处给出更严格的定义。
约束力在任何虚位移中所做的虚功为零,称此约束为理想约束。
即满足:0N W δ∑=事实上,大多数约束为理想约束。
13.5 虚位移原理具有完整、双面、定常、理想约束的质点系,在给定位置保持平衡的充要条件是,所有作用于质点系上的主动力在任何虚位移上所做的虚功之和为零。
即0F W δ∑=用虚位移原理可求两类问题:一、 求主动力或平衡条件(位置)——对几何可变体系例1 本章开头例子(典型例题) 如图,系统平衡。
已知Q 、l 、α ,求P 。
分析:由几何法找“运动”关系比较难,而结构规则,故用解析法较方便。
解:选α 为广义坐标,建立坐标系如图。
虚功方程:Σ0F W δ=C E P x Q y δδ⋅+⋅= (1) 而2cos ,3sin C E x l y l αα==2sin ,3cos C E x l y l δαδαδαδα=-⋅=⋅代入方程(1),得 (2sin )3cos 0P l Q l αδααδα⋅-⋅+⋅⋅=3cot 2P Q α=例2:(书例13-4)已知Q 、l 、k ,弹簧原长为l 。
求平衡时θ。
(以方程给出)分析:本题与上一题结构类似,只是增加一弹簧。
对有弹簧的题目,需要先将弹簧去掉,代之以弹性力,弹簧力视为常主动力。
lll l ll解:去掉弹簧,代之以弹簧力。
选θ 为广义坐标,建立坐标系如图。
弹簧力为(2cos )(2cos 1)F k l l kl θθ=-=-虚功方程:Σ0F W δ=0H E Q y F x δδ-⋅-⋅= (1) 而3sin ,2cos H E y l x l θθ==3cos ,2sin H E y l x l δθδθδθδθ=⋅=-⋅ 代入虚功方程(1),3cos 2sin 0Q l F l θδθθδθ-⋅⋅+⋅⋅=2(2cos 1)tan 3Q kl θα=- 例3:(补充老书例17-2)图示机构。