船舶减摇装置
- 格式:pdf
- 大小:208.26 KB
- 文档页数:3
船用减摇装置原理船用减摇装置是一种用于减少船舶在海上航行时的摇晃和颠簸的装置。
它通过一系列的物理原理和工程设计来实现这一目标。
船舶在海上航行时容易受到风浪的影响,造成船体的摇晃,给船上的人员和货物带来不便和危险。
因此,船用减摇装置的设计和应用对于提高船舶的航行稳定性和舒适性至关重要。
船用减摇装置的原理是基于减少船舶受到外部力的影响,从而减少船体的摇晃。
其主要原理包括抗摇力原理、阻尼原理和控制原理。
抗摇力原理是通过向船体施加一个与船舶受到的摇晃力相反的力来抵消船体的摇晃。
船体的摇晃力是由于外部的风力和浪力引起的,通过船用减摇装置产生的抗摇力可以减小或抵消这些外部力,从而减少船体的摇晃。
抗摇力可以通过安装在船舶侧面的减摇翼、减摇板或减摇球等装置来产生。
阻尼原理是通过增加船舶的摇晃阻尼来减少船体的摇晃。
船体的摇晃是由于外部力的作用下,船体的摇晃频率接近其固有频率而产生的。
通过在船舶上安装减摇装置,可以增加船舶的摇晃阻尼,使其固有频率与外部力的频率不匹配,从而减少船体的摇晃。
阻尼可以通过液压系统、摇摆阻尼器或摇摆阻尼球等装置来实现。
控制原理是通过自动控制船用减摇装置的工作来实现船体的稳定。
通过监测船舶的运动状态和外部环境的变化,控制系统可以根据预设的参数和算法来自动调整船用减摇装置的工作状态,以达到减少船体摇晃的效果。
控制原理可以通过传感器、控制算法和执行器等组成的控制系统来实现。
船用减摇装置的原理是基于抗摇力、阻尼和控制原理来减少船舶在海上航行时的摇晃和颠簸。
通过合理的工程设计和装置安装,船舶的航行稳定性和舒适性可以得到显著改善。
船用减摇装置的应用对于提高船舶的航行安全性和舒适性具有重要意义,对于船舶行业的发展和航海技术的进步有着积极的促进作用。
船用减摇装置原理船舶在航行过程中会受到海浪的影响,从而产生摇晃的运动,这种摇晃会给船舶和船员带来很大的安全隐患。
为了解决这个问题,船舶上通常会安装减摇装置,以减小船体的摇晃幅度,提高船舶的稳定性和航行安全性。
船用减摇装置的原理主要包括水动力原理和控制原理两个方面。
水动力原理是指利用水的力量来抵消船舶的摇晃运动。
船用减摇装置通常由一个或多个减摇槽组成,这些减摇槽位于船舶的两侧,沿船体纵向分布。
当船舶受到侧向波浪的作用时,水会穿过减摇槽,形成与波浪相位相反的力,从而产生一个与船舶摇晃方向相反的力矩。
这样,船舶受到的摇摆力矩就会减小,从而减小了船体的摇晃幅度。
控制原理是指通过一系列的控制系统来实时监测船体的摇晃情况,并根据监测结果调整减摇装置的工作状态。
控制系统通常由传感器、计算机和执行机构组成。
传感器用于感知船体的摇晃情况,如倾斜角度、加速度等;计算机用于处理传感器采集到的数据,并根据一定的控制算法计算出减摇装置的工作状态;执行机构则根据计算机的指令,调整减摇装置的工作参数,如减摇槽的开启程度、开启时间等。
船用减摇装置的工作过程可以简单概括为以下几个步骤:1. 传感器感知船体的摇晃情况,将采集到的数据发送给计算机;2. 计算机根据传感器采集到的数据,通过控制算法计算出减摇装置的工作状态;3. 执行机构根据计算机的指令,调整减摇装置的工作参数;4. 减摇装置开始工作,水流通过减摇槽产生与船体摇晃方向相反的力,从而减小船体的摇晃幅度;5. 一段时间后,计算机重新采集船体的摇晃情况,并根据新的数据调整减摇装置的工作状态;6. 重复以上步骤,不断监测和调整减摇装置的工作状态,以保持船体的稳定性。
船用减摇装置通过水动力原理和控制原理的相互配合,能够有效减小船体的摇晃幅度,提高船舶的稳定性和航行安全性。
目前,船用减摇装置已广泛应用于各类大型船舶,如客船、油轮、货船等。
在未来,随着技术的不断发展,船用减摇装置的性能将进一步提升,为航行中的船舶提供更加稳定和安全的环境。
减摇水舱原理减摇水舱是一种用于船舶减小摇晃幅度的装置,其原理是通过水的质量和运动来抵消船舶的摇摆力,从而减少船舶在海上的晃动,提高航行的稳定性和乘坐的舒适度。
减摇水舱的工作原理可以简单地描述为:当船舶在海上遇到波浪冲击时,船体会受到波浪力的作用而产生摇摆。
为了减小这种摇晃幅度,减摇水舱通过在船体内部安装特殊的水箱来实现。
这些水箱位于船舶的两侧,可以通过泵将水从一侧的水箱抽出,然后通过管道将水注入到另一侧的水箱中。
水的运动过程中会产生反作用力,这种反作用力可以抵消船体的摇摆力,达到减小船体摇晃幅度的目的。
具体来说,在船舶遇到波浪冲击时,船体受到的摇晃力会产生一个向一侧的力矩。
为了抵消这个力矩,减摇水舱会将一侧的水箱内的水抽出,使得该侧的水箱减重,同时将抽出的水通过管道注入到另一侧的水箱中,使得该侧的水箱增重。
这样一来,船舶的重心会发生变化,产生一个与船体摇摆方向相反的力矩。
通过控制水的流动速度和流量,可以调节反作用力的大小,从而减小船体的摇晃幅度。
减摇水舱的设计和控制需要考虑多个因素,如船舶的尺寸、载重量、船体结构等。
在实际应用中,减摇水舱通常是由一套自动控制系统来控制的,该系统可以根据船舶的运行状态和海况自动调节水的流动速度和流量,以达到最佳的减摇效果。
减摇水舱的优点是可以有效地减小船舶的摇晃幅度,提高航行的稳定性和乘坐的舒适度。
特别是在恶劣的海况下,减摇水舱可以显著降低船舶的摇晃,保证船员和乘客的安全和舒适。
此外,减摇水舱的运行和控制相对简单,可以很好地适应不同类型的船舶。
然而,减摇水舱也存在一些局限性。
首先,其安装和维护成本较高,需要耗费一定的人力和物力资源。
其次,减摇水舱对船体结构的要求较高,需要在设计船舶时就充分考虑减摇水舱的安装和布局。
此外,在极端恶劣的海况下,减摇水舱也可能无法完全消除船体的摇晃。
减摇水舱是一种通过水的质量和运动来减小船舶摇晃幅度的装置。
其原理是通过控制水的流动来产生反作用力,以抵消船体的摇晃力,提高航行的稳定性和乘坐的舒适度。
游艇陀螺仪减摇仪原理答案:游艇陀螺仪减摇仪的原理主要是基于陀螺效应,通过利用陀螺的角动量进行减摇。
这种装置内部装有重型飞轮,依靠飞轮的角动量(动量矩)与进动效应进行减摇。
角动量是衡量陀螺减摇能力的关键指标,直接关系到减摇效果。
相比其他类型的减摇装置,减摇陀螺具有以下优点:减摇效果好,可达80%-95%;不受航速的影响,航行、停泊状态都可减摇;适装性好,船舱、甲板、居中、偏置都可装;没有伸出船体的附件,工作时不影响航速;允许安装多台,联合工作,适配更大船型。
因此,减摇陀螺成为中小型船艇的首选减摇方案,现已成为引航艇、海事巡逻艇等船的标配。
延伸:一、陀螺仪的工作原理陀螺仪是一种能够感知和保持方向的装置,其工作原理基于陀螺效应。
当陀螺被旋转时,它会在空间中保持方向不变,不受外部力的干扰。
因此,如果将陀螺仪装置安装到一个运动的物体上,它可以被用来感知该物体的运动状态。
二、减摇仪的构成和工作流程减摇仪就是利用陀螺仪来感知游艇在海上的状态,并通过控制机械装置来抵消不良的晃动和颠簸。
减摇仪由陀螺传感器、控制电路和驱动单元组成。
它通过感知游艇的晃动状态来控制陀螺仪旋转速度和角度,从而减少游艇的晃动和颠簸。
三、减摇仪减轻游艇晃动和颠簸的原理在海上航行时,游艇容易受到波浪、风浪等外部环境因素的影响,导致晃动和颠簸。
而减摇仪通过感知游艇晃动状态,将这些信号传输给控制电路,并控制驱动单元来调整陀螺仪的旋转速度和角度。
由于陀螺效应的作用,减摇仪所产生的反作用力可以抵消游艇的晃动和颠簸,使得游艇行驶更加平稳。
四、减摇仪的应用前景目前,减摇仪已经成为许多游艇和船只的标配装置。
它能够大大提高游艇的航行舒适性,减轻乘客的晕船感。
同时,减摇仪还为游艇的安全性和稳定性提供了重要保障,避免了极端天气条件下的风险。
减摇装置介绍近百余年来,人们一直致力于研究减缓船舶摇摆的措施。
世界各国先后研究了近百种不同形式的减摇装置。
但目前世界上广泛采用的仅是减摇水舱、舭龙骨和减摇鳍,其中居垄断地位的是减摇鳍,其减摇效果最佳。
下面分别对上述三种减摇装置进行介绍。
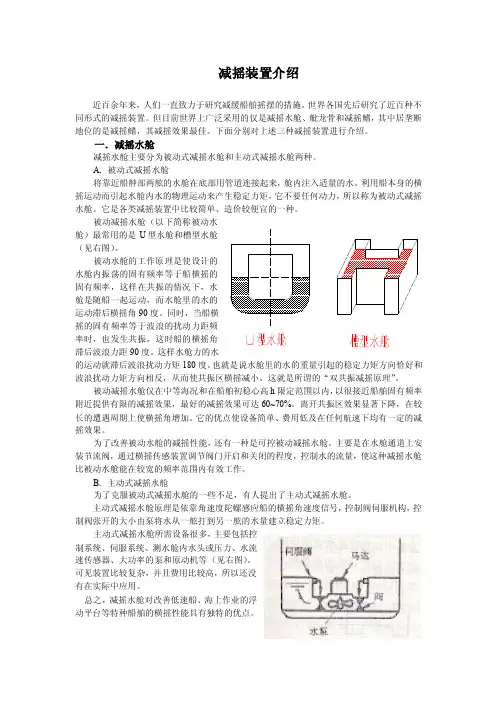
一.减摇水舱减摇水舱主要分为被动式减摇水舱和主动式减摇水舱两种。
A.被动式减摇水舱将靠近船舯部两舷的水舱在底部用管道连接起来,舱内注入适量的水。
利用船本身的横摇运动而引起水舱内水的物理运动来产生稳定力矩。
它不要任何动力,所以称为被动式减摇水舱。
它是各类减摇装置中比较简单、造价较便宜的一种。
被动减摇水舱(以下简称被动水舱)最常用的是U型水舱和槽型水舱(见右图)。
被动水舱的工作原理是使设计的水舱内振荡的固有频率等于船横摇的固有频率,这样在共振的情况下,水舱是随船一起运动,而水舱里的水的运动滞后横摇角90度。
同时,当船横摇的固有频率等于波浪的扰动力距频率时,也发生共振,这时船的横摇角滞后波浪力距90度。
这样水舱力的水的运动就滞后波浪扰动力矩180度。
也就是说水舱里的水的重量引起的稳定力矩方向恰好和波浪扰动力矩方向相反,从而使共振区横摇减小。
这就是所谓的“双共振减摇原理”。
被动减摇水舱仅在中等海况和在船舶初稳心高h限定范围以内,以很接近船舶固有频率附近提供有限的减摇效果,最好的减摇效果可达60~70%。
离开共振区效果显著下降,在较长的遭遇周期上使横摇角增加。
它的优点使设备简单、费用低及在任何航速下均有一定的减摇效果。
为了改善被动水舱的减摇性能,还有一种是可控被动减摇水舱。
主要是在水舱通道上安装节流阀,通过横摇传感装置调节阀门开启和关闭的程度,控制水的流量,使这种减摇水舱比被动水舱能在较宽的频率范围内有效工作。
B.主动式减摇水舱为了克服被动式减摇水舱的一些不足,有人提出了主动式减摇水舱。
主动式减摇水舱原理是依靠角速度陀螺感应船的横摇角速度信号,控制阀伺服机构,控制阀张开的大小由泵将水从一舷打到另一舷的水量建立稳定力矩。
减摇原理的三种形式及对应的减摇装置嘿,朋友们!今天咱们聊聊一个可能你没听过但又超有意思的话题——减摇原理!你可能会想,减摇这俩字跟我有什么关系?别急,听我慢慢道来。
无论你是在海上航行,还是坐在游轮上,摇晃的感觉总是让人恼火。
可这个减摇原理,就像个聪明的小帮手,能让我们在波涛汹涌的海面上保持一份平静。
现在,就让咱们深入探讨一下这三种减摇的形式,还有它们各自的神器装置吧!1. 主动减摇系统说到主动减摇系统,想象一下你在海上,船身随着浪潮上下摇摆,简直就像在坐过山车。
但是,这种主动减摇系统就像一位勇敢的骑士,随时准备出手相助。
它通过传感器实时监测船体的运动,利用机械装置,比如油压或电动装置,来调整船体的姿态,减少摇晃。
这种方式的好处是反应迅速,简直就是海上飞毛腿,瞬间就能让你感觉像在平坦的道路上行驶。
不过呢,话说回来,主动系统可不便宜,安装和维护成本都让人皱眉。
不过嘛,钱花得值,能让你舒舒服服的在海上玩乐,心情自然就好啦。
1.1 舵机系统在这个主动减摇的大家庭里,舵机系统可是个不可或缺的角色。
它通过控制舵叶的角度,来抵消船体的摇晃。
就像在骑自行车时用力转动把手,瞬间就能调整方向。
舵机的反应速度极快,简直就像那让人眼花缭乱的魔术表演,令你在波涛中安然无恙!1.2 自动控制装置自动控制装置呢,就像一位技术宅高手,时时刻刻盯着船的状态,确保一切正常。
它通过复杂的算法,分析船体的运动数据,然后自动调节减摇装置,让你觉得就像在进行一场无声的舞蹈,优雅而自如。
2. 被动减摇系统接下来咱们聊聊被动减摇系统。
这个系统就像老派的智慧,依靠船体的设计和重心的布局来减少摇晃。
想象一下,船的底部设计成特殊的形状,像个流线型的飞鱼,能有效抵御海浪的侵袭。
这种方式省心又省钱,不用太多的科技含量,大家都能接受。
2.1 阻尼器被动减摇里,阻尼器就像一位安静的守护者。
它能吸收船体运动时产生的能量,减少摇晃。
你可以想象成在舞会上,那个总是站在角落却默默支持你的人,虽不显眼,但却是你最可靠的后盾!2.2 减摇鳍减摇鳍就更有趣了,像个翅膀,伸出水面,帮助船只抵抗波浪。
减摇陀螺原理减摇陀螺是一种常见的自动稳定装置,它广泛应用于飞机、船舶、导弹等领域。
它的原理是通过陀螺效应来实现自动稳定。
本文将从陀螺效应的定义、减摇陀螺的工作原理以及应用等方面进行探讨。
我们来了解一下陀螺效应的含义。
陀螺效应是指当一个陀螺体受到外力作用时,其自转轴会发生改变。
这是由于陀螺体的自转产生了一个力矩,使其自转轴发生偏离的结果。
根据陀螺效应的原理,我们可以设计出一种装置,利用陀螺效应实现自动稳定。
减摇陀螺就是利用陀螺效应来实现船舶减摇的装置。
在船舶行驶过程中,由于波浪的作用,船体会不断晃动,给乘客和货物带来不便。
减摇陀螺的出现就是为了解决这个问题。
它通过利用陀螺效应来产生一个反作用力,使船体保持平稳。
减摇陀螺的工作原理可以简单地概括为以下几个步骤。
首先,陀螺体开始自转,产生一个自转轴。
当船体晃动时,减摇陀螺会感应到这种晃动,并产生一个相反方向的力矩。
这个力矩会使陀螺体自转轴发生偏离,并产生一个反作用力,使船体产生一个与晃动相反的力。
通过不断的调整反作用力的大小和方向,减摇陀螺可以使船体保持平稳,减少晃动。
减摇陀螺的应用非常广泛。
在船舶上,减摇陀螺可以使船体保持平稳,提高航行的舒适性和安全性。
在飞机上,减摇陀螺可以帮助飞行员稳定飞行,减少飞行过程中的晃动。
在导弹上,减摇陀螺可以使导弹保持稳定的飞行轨迹,提高打击精度。
除了船舶、飞机和导弹,减摇陀螺还有其他一些应用。
在摄影和摄像领域,减摇陀螺可以帮助摄影师和摄像师拍摄更加稳定的画面。
在激光加工和精密加工领域,减摇陀螺可以提高加工的精度和稳定性。
在医疗设备中,减摇陀螺可以帮助医生进行更加精确的手术操作。
减摇陀螺是一种利用陀螺效应来实现自动稳定的装置。
它通过感应船体或飞机的晃动,并产生相反方向的力矩,使船体或飞机保持平稳。
减摇陀螺的应用非常广泛,可以提高航行和飞行的舒适性和安全性,同时也可以应用于其他领域,提高工作的精度和稳定性。
希望通过本文的介绍,读者对减摇陀螺的原理有更加深入的了解。
船用减摇装置原理导语:船舶在行驶中会受到波浪的冲击,产生摇摆现象,给航行带来不安全因素。
为了解决这个问题,船舶上通常会安装减摇装置,它能够有效地减小船体的摇摆,提高船舶的稳定性。
本文将介绍船用减摇装置的原理及其工作机制。
一、船用减摇装置的原理概述船用减摇装置是一种能够抑制船舶摇摆的设备,它基于控制系统的原理,在船体上固定一些装置,通过自动调节装置的运动状态,实现对船体的减摇作用。
二、船用减摇装置的工作机制1. 传感器检测船体的摇摆状态船用减摇装置首先需要通过传感器来检测船体的摇摆状态。
传感器通常安装在船舶的船体上,能够实时感知船体的倾斜角度、角速度等参数。
2. 控制系统分析船体的运动状态传感器将检测到的数据传输给控制系统,控制系统会根据这些数据分析船体的运动状态,并根据预设的减摇策略做出相应的调整。
3. 控制船用减摇装置的动作根据控制系统的分析结果,船用减摇装置会做出相应的动作。
船用减摇装置通常由液压系统或电动机驱动,通过改变装置的运动状态来产生减摇作用。
4. 减小船体的摇摆船用减摇装置的动作可以改变船体的重心位置或者产生抗摇力,从而减小船体的摇摆。
这些动作可以通过调节装置的位置、角度或者力的大小来实现。
5. 实时调节船用减摇装置的参数船用减摇装置通常具有自动控制功能,能够根据船体的摇摆情况实时调节装置的参数。
通过不断地监测和调整,船用减摇装置能够保持船体的稳定性,提高船舶的航行安全性。
三、船用减摇装置的分类根据减摇装置的工作原理和结构特点,船用减摇装置可以分为以下几类:1. 船体球astern船体球astern是一种常见的船用减摇装置,它由一系列球形物体组成,通过改变球体的位置和重量分布来实现减摇作用。
船体球astern的优点是结构简单,安装方便,适用于各种类型的船舶。
2. 液压式减摇装置液压式减摇装置是利用液压系统产生力来减小船体的摇摆。
它通常由液压缸、液压泵、控制阀等组成,能够通过改变液压系统的工作状态来产生抗摇力。
4.减摇水舱4.1 概述在船舶横摇减摇领域,减摇鳍是最常用且减摇效果最好的主动式减摇装置,但是传统减摇鳍的减摇能力与船舶航速有关;在低航速或零航速情况下,传统减摇鳍基本没有减摇效果;减摇水舱是另一种减摇装置,其在全航速下都能起到减摇效果,并且能够抗船舶横倾,破冰作业及其倾斜试验等;减摇水舱结构简单、造价低廉,便于维护保养,但是需要占用一定的甲板面积,因此常见于渡轮、集装箱船、科学考察船、抢险船、巡逻船、海洋救生船等。
4.2减摇水舱的发展现代意义上的减摇水舱的研究可以追溯到1860年,但是首次把水舱作为固定的减摇设备是1880年装于英国皇家海军潜艇“Inflexible ”号上。
这些早期采用的水舱为被动式平面减摇水舱,通过阻尼隔壁增加水舱阻尼特性。
从设计水平来看,这类水舱对水舱的减摇原理已经有相当的见解,但是,这类水舱由于占用空间大、噪声高等原因,而被废弃不用。
此后,И.Г.布勃诺夫、霍特、C .O.马卡洛夫等人先后对利用水舱减摇问题进行了研究[18]。
真正使减摇水舱发展成为一种实用的减摇装置的是德国人佛拉姆(Frahm ),他于1911年成功地提出了被动式U 型减摇水舱[1],现在它已成为船舶的基本减摇装置之一,其结构型式如图4.1所示。
部分充水的两舷边舱,相互间由连通水道相沟通,两舷边舱上面部分由空气连通道相连接,大量的水在船舶横摇运动作用下从一舷边舱流到另一舷边舱,由于水舱内水的重量及其惯性作用产生稳定U 型水舱又称为佛拉姆水舱[19]。
图4.1 U 型减摇水舱 图4.2 槽型水舱被动式U 型减摇水舱调谐于单一频率,在有限的波浪频率范围内能有效地减摇,当偏离这些波浪频率时,不但不能起减摇作用,有时还可能引起增摇现象。
因此,1934年德国的西门子公司在佛拉姆水舱设计的基础上,设计出一种主动式U 型水舱[1]。
该水舱通过鼓风机驱动舱内水的流动产生与扰动力矩具有180 相位差的稳定力矩。
主动式水舱可以使水舱能够在更宽的波浪频率范围内具有减摇效果,但是水舱内大量流体的“快速改变”问题,在技术实现上存在一定的困难,需要消耗的能量很大,在经济上很不合算。
intering减摇装置原理在大海上航行的船只,有时候会像个调皮的孩子一样晃来晃去。
这可不好玩,会让人晕头转向,还可能影响货物的安全。
所以呢,聪明的人类就发明了减摇装置,来让船只乖乖听话,稳定前行。
那这减摇装置到底是咋工作的呢?其实啊,就像是给船只找了个平衡大师!咱们先来说说被动式减摇装置。
这就好比给船只穿上了一件能自动调整平衡的“神奇外套”。
比如说常见的舭龙骨,它就像船只的小翅膀一样,长在船的两侧。
当船开始摇晃的时候,水流经过这小翅膀,就会产生一种阻力,就像有人轻轻地拉住了船,不让它晃得太厉害。
还有一种被动式的,叫做减摇水舱。
这就有点像船肚子里的小游泳池。
当船往一边倾斜的时候,水就会从一边跑到另一边,利用水的流动产生的力量来抵消摇晃的力量。
你看,是不是很巧妙?接下来,咱们再聊聊主动式减摇装置。
这可就更厉害了,就像是给船只请了个超级智能的保镖!比如说主动式减摇鳍,它能根据船的摇晃情况,自动调整角度和位置。
就好像它能感知到船的心思,然后迅速做出反应,把船给稳住。
还有一种主动式的是减摇陀螺,它就像一个高速旋转的大轮子,利用自身的旋转产生的力量来对抗船只的摇晃。
你想想看,船只在大海上航行,有了这些减摇装置的帮忙,是不是就像有了一双稳定的大手在扶着它,让它能够更加平稳地前进,不再那么摇摇晃晃啦?其实啊,减摇装置的原理说起来好像挺简单,但要真正实现让船只稳稳当当的,背后可是有无数科学家和工程师们的努力和智慧呢!他们不断地研究、改进,就是为了让我们在海上航行的时候能够更加安全、舒适。
所以说,当我们享受着平稳的海上之旅时,可别忘了感谢这些神奇的减摇装置,还有那些为了它们付出心血的人们哟!怎么样,朋友,这下你对减摇装置的原理是不是有了更清楚的认识啦?。
舭龙骨概述在船体舭部列板外侧,沿船长方向并垂直于舭列板安装的纵向构件被称为舭龙骨。
舭龙骨是最常用、最简单的减摇装置。
舭龙骨在任何情况下都有效,在近似共振状态下减摇效果最明显1。
舭龙骨因其结构简单、造价低、维护方便、效能较好而得到广泛应用,几乎每艘船舶都装有舭龙骨。
根据船型特点,设计舭龙骨的形状和尺寸,其长度一般为船长的1/4到1/2,宽度一般为0.3m~1.2m。
通常位于主船体中部水线以下,沿流线布置,并且尽量与舭部外板垂直。
原理影响横摇振幅的因素是问有周期和阻尼。
前者要求尽可能避开共振区,但固有周期不能随意增大,特别在不规则波中,各种频率的成分波都有,很难完全避开共振。
后者的作用是降低共振摇幅,但一般船型的裸体本身横摇阻尼是比较小的,因此减缓横摇的主要方法是依靠减摇装置。
2船体横摇阻尼可分为兴波阻尼,旋涡阻尼和摩擦阻尼三种。
并认为摩擦阻尼所占的比例很小可以忽略。
在小角度横摇(<6°)时,认为是以兴波阻尼为主,随着横摇幅度的增大,旋涡阻尼成分逐渐加大,并认为横摇引起的旋涡阻尼与横摇角速度的平方成比例(即非线性的阻尼)。
在中等横播下,旋涡阻尼至少与兴波阻尼有同一数量级。
舭龙骨减摇的原理1.加装舭龙骨本身,增加了旋涡阻尼。
(大小取决于舭龙骨面积、相对水流速度)2.舭龙骨影响了船体压力分布,在邻近的船体上产生增压区和减压区,所产生的合力起附加阻尼作用。
(取决于船型)1陈以芬. 对大方形系数船舶设置舭龙骨的看法_陈以芬[J]. 船舶工程, 1981, 卷缺失(5): 29-32.3. 舭龙骨扰动船体周围的水,引起船的横摇附加质量惯性矩增加,从而增大横摇周期 3。
减摇作用的大小由舭龙骨的形状、安装位置、尺寸大小等决定。
多采用经验公式来计算:舭龙骨总阻尼力经验公式:234.0M θr S B B =(t*m )其中B S ——两舷舭龙骨总面积(m 2)θ ——横摇角速度(rad/s )r ——横摇轴心Gx 至舭龙骨中心线的距离(m )舭龙骨提供的横摇附加质量惯性矩经验公式:22lb r J B ρπ≈∆l ——舭龙骨长度b——舭龙骨宽度结构由于舭龙骨远离船体梁的中和轴,受到很大的总纵弯曲应力,因此在结构上必须让舭龙骨不参与船体的总纵弯曲,从而避免在舭龙骨损坏的情况下影响到船体的主要结构。