第七章模糊控制应用实例
- 格式:ppt
- 大小:808.50 KB
- 文档页数:42
模糊控制应用实例模糊控制是一种基于模糊逻辑的控制方法,它能够处理模糊的输入和输出,使得控制系统具有更好的鲁棒性和适应性。
下面将介绍一个模糊控制的应用实例。
某工厂的生产线上有一台机器人,它需要根据生产线上的物品进行分类和分拣。
由于生产线上的物品形状、颜色、大小等特征存在一定的模糊性,传统的控制方法很难实现准确的分类和分拣。
因此,工厂决定采用模糊控制方法来解决这个问题。
首先,需要对机器人的控制系统进行建模。
假设机器人的控制系统包括三个输入变量和一个输出变量。
其中,三个输入变量分别为物品的大小、颜色和形状,输出变量为机器人的动作,包括分类和分拣两种动作。
接下来,需要确定输入变量和输出变量的模糊集合和模糊规则。
假设物品的大小、颜色和形状分别属于三个模糊集合:小、中、大;红、绿、蓝;圆、方、三角。
输出变量也分别属于两个模糊集合:分类、分拣。
根据这些模糊集合,可以确定一些模糊规则,例如:如果物品大小为小且颜色为红且形状为圆,则机器人动作为分类;如果物品大小为中且颜色为绿且形状为方,则机器人动作为分拣;如果物品大小为大且颜色为蓝且形状为三角,则机器人动作为分类。
最后,需要进行模糊推理和模糊控制。
当机器人接收到一个物品时,它会根据物品的大小、颜色和形状,将它们映射到对应的模糊集合中。
然后,根据模糊规则进行模糊推理,得到机器人的动作。
最后,根据机器人的动作,控制机器人进行分类或分拣。
通过模糊控制方法,机器人可以更准确地分类和分拣物品,提高生产效率和质量。
同时,模糊控制方法还具有较好的鲁棒性和适应性,能够应对物品特征的变化和噪声的干扰。
总之,模糊控制是一种有效的控制方法,它能够处理模糊的输入和输出,使得控制系统具有更好的鲁棒性和适应性。
在工业生产、交通运输、医疗健康等领域都有广泛的应用。
模糊控制的应用实例与分析本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.March模糊控制的应用学院实验学院专业电子信息工程姓名指导教师日期 2011 年 9 月 20 日在自动控制中,包括经典理论和现代控制理论中有一个共同的特点,即控制器的综合设计都要建立在被控对象准确的数学模型(如微分方程等)的基础上,但是在实际工业生产中,很多系统的影响因素很多,十分复杂。
建立精确的数学模型特别困难,甚至是不可能的。
这种情况下,模糊控制的诞生就显得意义重大,模糊控制不用建立数学模型,根据实际系统的输入输出的结果数据,参考现场操作人员的运行经验,就可对系统进行实时控制。
模糊控制实际上是一种非线性控制,从属于智能控制的范畴。
现代控制系统中的的控制能方便地解决工业领域常见的非线性、时变、在滞后、强耦合、变结构、结束条件苛刻等复杂问题。
可编程控制器以其高可靠性、编程方便、耐恶劣环境、功能强大等特性很好地解决了工业控制领域普遍关心的可靠、安全、灵活、方便、经济等问题,这两者的结合,可在实际工程中广泛应用。
所谓模糊控制,其定义是是以模糊数学作为理论基础,以人的控制经验作为控制的知识模型,以模糊集合、模糊语言变量以及模糊逻辑推理作为控制算法的一种控制。
模糊控制具有以下突出特点:(1)模糊控制是一种基于规则的控制,它直接采用语言型控制规则,出发点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用(2)由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数学模型难以获取,动态特性不易掌握或变化非常显著的对象非常适用。
(3)基于模型的控制算法及系统设计方法,由于出发点和性能指标的不同,容易导致较大差异;但一个系统语言控制规则却具有相对的独立性,利用这些控制规律间的模糊连接,容易找到折中的选择,使控制效果优于常规控制器。

模糊控制应用实例1. 引言模糊控制是一种基于模糊逻辑的控制方法,它能够处理不确定性和模糊性问题。
本文将介绍模糊控制的应用实例,包括模糊控制在机器人导航、温度控制和交通信号灯控制等方面的应用。
2. 模糊控制在机器人导航中的应用2.1 模糊控制器设计在机器人导航中,模糊控制可以用于控制机器人的运动路径。
首先,需要设计一个模糊控制器,该控制器包括输入和输出变量以及一组模糊规则。
输入变量可以是机器人与障碍物的距离、机器人当前的角度等。
输出变量通常是机器人的速度和转向角度。
2.2 模糊控制器实现在机器人导航中,可以使用传感器来获取机器人与障碍物的距离和机器人当前的角度。
这些信息可以作为输入变量输入到模糊控制器中。
模糊控制器根据一组模糊规则来计算机器人的速度和转向角度,然后将其作为输出变量输出给机器人的控制系统。
2.3 模糊控制器优势相比于传统的控制方法,模糊控制在机器人导航中具有一定的优势。
首先,模糊控制能够处理不确定性和模糊性问题,使得机器人能够更好地适应复杂的环境。
其次,模糊控制可以通过调整模糊规则和输入变量的权重来优化机器人的导航性能。
最后,模糊控制可以很容易地与其他控制方法结合使用,以实现更高级的导航功能。
3. 模糊控制在温度控制中的应用3.1 温度控制系统在温度控制中,模糊控制可以用于调节加热器或制冷器的功率,以维持目标温度。
温度控制系统通常包括一个温度传感器、一个控制器和一个执行器。
温度传感器用于测量当前的温度,控制器根据温度的变化来调整执行器的功率。
3.2 模糊控制器设计在温度控制中,需要设计一个模糊控制器来根据当前的温度误差和误差变化率来调整执行器的功率。
模糊控制器的输入变量可以是温度误差和误差变化率,输出变量可以是执行器的功率。
通过选择适当的模糊规则和调整输入变量的权重,可以实现温度的稳定控制。
3.3 模糊控制器实现在温度控制中,可以使用一个模糊控制器来计算执行器的功率。
模糊控制器根据一组模糊规则来决定执行器的功率大小,然后将其输出给执行器。


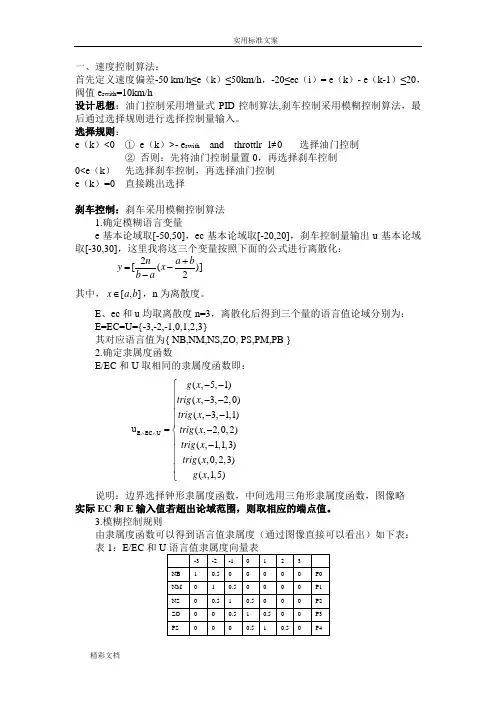
一、速度控制算法:首先定义速度偏差-50 km/h ≤e (k )≤50km/h ,-20≤ec (i )= e (k )- e (k-1)≤20,阀值e swith =10km/h设计思想:油门控制采用增量式PID 控制算法,刹车控制采用模糊控制算法,最后通过选择规则进行选择控制量输入。
选择规则:e (k )<0 ① e (k )>- e swith and throttlr_1≠0 选择油门控制② 否则:先将油门控制量置0,再选择刹车控制 0<e (k ) 先选择刹车控制,再选择油门控制e (k )=0 直接跳出选择刹车控制:刹车采用模糊控制算法1.确定模糊语言变量e 基本论域取[-50,50],ec 基本论域取[-20,20],刹车控制量输出u 基本论域取[-30,30],这里我将这三个变量按照下面的公式进行离散化:)]2(2[ba x ab n y +--= 其中,],[b a x ∈,n 为离散度。
E 、ec 和u 均取离散度n=3,离散化后得到三个量的语言值论域分别为:E=EC=U={-3,-2,-1,0,1,2,3}其对应语言值为{ NB,NM,NS,ZO, PS,PM,PB } 2.确定隶属度函数E/EC 和U 取相同的隶属度函数即:E E CU (,5,1)(,3,2,0)(,3,1,1)u (,2,0,2)(,1,1,3)(,0,2,3)(,1,5)g x trig x trig x trig x trig x trig x g x ∧∧--⎧⎪--⎪⎪--⎪=-⎨⎪-⎪⎪⎪⎩说明:边界选择钟形隶属度函数,中间选用三角形隶属度函数,图像略实际EC 和E 输入值若超出论域范围,则取相应的端点值。
3.模糊控制规则由隶属度函数可以得到语言值隶属度(通过图像直接可以看出)如下表: 表1:E/EC 和3.模糊推理由模糊规则表3可以知道输入E 与EC 和输出U 的模糊关系,这里我取两个例子做模糊推理如下:if (E is NB) and (EC is NM) then (U is PB) 那么他的模糊关系子矩阵为:1211U EC E R R R R ⨯⨯=其中,711)0,,0,5.0,1(0⨯== P R E ,即表1中NB 对应行向量,同理可以得到,712)0,,0,5.0,1,0(1⨯== P R EC , 711)0,,0,5.0,1(0⨯== P R U77210000000000005.05.00005.010)0,,0,5.0,1,0()0,,0,5.0,1(⨯⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⨯=⨯TEC E R R 49121)0,,0,5.0,5.0,0,0,0,0,0,5.0,1,0(⨯= EC E R7491211000000005.05.00005.0100000)0,,0,5.0,1()0,,5.0,1,0(⨯⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⨯=⨯= TU EC E R R Rif (E is NVB or NB) and (EC is NVB) then (U is PVB)1112U EC E R R R R ⨯⨯= 结果略按此法可得到27个关系子矩阵,对所有子矩阵取并集得到模糊关系矩阵如下:)27,,2,1(21 ==i R R R R i 由R 可以得到模拟量输出为:()U E EC R =⨯4.去模糊化由上面得到的模拟量输出为1×7的模糊向量,每一行的行元素(u (z ij ))对应相应的离散变量z j ,则可通过加权平均法公式解模糊:)21,,2,1()()(21021===∑∑==j i zu z zu u i iji jij从而得到实际刹车控制量的精确值u 。
模糊控制实际应用研究模糊控制是一种基于模糊逻辑的控制方法,它可以在模糊的环境中进行决策和控制,其核心思想就是用人类的经验和语言来描述系统。
在实际应用中,模糊控制被广泛应用于各种领域,比如工业控制、智能交通、机器人控制、医疗、金融等。
本文将从几个方面介绍模糊控制在实际应用中的研究进展和应用案例。
一、工业控制在工业生产中,模糊控制被广泛应用于生产流程控制、机器人控制、自适应控制等方面。
其中,以炼油、化工、冶金等高危行业为代表的控制系统,风险高、控制难度大,传统控制方法难以适应。
而模糊控制正是满足了这种场景下的特殊需要。
例如,对于温度、压力等参数的控制,传统控制方法需要传感器读取实时数据,根据PID算法进行计算和调整,但是这样的调节方法需要不断地“试错”,耗费时间和人力。
相比之下,模糊控制的优势就体现出来了。
它不需要提前确定具体的输入量、输出量以及参数,只需要用文字传达控制要求,系统便可以自动地“学习”调节方法,从而提供最优的控制方案。
二、智能交通随着城市化进程的加速,城市交通越来越拥堵,安全问题也愈发凸显。
智能交通系统就是为了解决城市交通压力和安全问题而出现的。
模糊控制在智能交通系统中也起到了重要的作用。
首先,模糊控制可以对交通信号灯进行控制,提高交通流量,并降低交通拥堵。
其次,模糊控制可以结合路况、气象等不同因素,对车辆行驶速度进行控制,提高整个道路网络的通行效率,从而减轻交通拥堵的程度。
最后,模糊控制还可以根据路段交通的实时情况,对城市路网进行动态优化,从而使整个交通系统更加智能化、高效化。
三、机器人控制机器人技术是当代科技领域的一个热点,而机器人控制是机器人技术中的一个重要分支。
机器人控制的核心是对机器人进行快速、准确的控制,以达到预期的效果。
模糊控制在机器人控制中的应用也非常广泛。
比如在工业机器人的控制中,可以通过模糊控制对机器人的运动和运行参数进行灵活控制,从而实现自适应控制。
同时,模糊控制也可以应用于机器人的智能决策中,使其能够自主化地进行决策和行动。
自动化控制系统中的模糊控制技术应用案例分析摘要:自动化控制系统在各个领域中起着至关重要的作用,而模糊控制技术作为一种重要的控制方法,具有适应性强、可靠性高等特点,广泛应用于各种实际问题中。
本文通过分析两个实际案例,探讨了模糊控制技术在自动化控制系统中的应用。
1. 引言自动化控制系统是指利用计算机和现代控制技术对工业过程、机械设备等进行监测、控制和优化的系统。
模糊控制技术作为一种基于模糊逻辑的控制方法,具有适应性强、抗干扰能力好等优点,被广泛应用于自动化控制系统中。
2. 模糊控制技术基本原理模糊控制技术的基本原理是将模糊集合理论引入到控制系统中,通过设计模糊规则集合和模糊推理机制,实现对系统的控制。
模糊控制系统主要由模糊化、模糊推理和解模糊三个部分组成。
3. 应用案例一:自动驾驶汽车的模糊控制自动驾驶汽车的模糊控制是近年来自动化领域的热点研究之一。
在自动驾驶汽车中,模糊控制技术可以用于实现车辆的路径规划和操控。
通过使用激光雷达等传感器获取周围环境信息,将信息输入到模糊控制系统中进行处理,计算出车辆应该采取的行驶方向和速度。
在路径规划方面,模糊控制系统可以根据当前位置和目标位置之间的距离进行判断,并结合交通规则、路况等因素,确定车辆的行驶路径。
在操控方面,模糊控制系统可以根据车辆与前方障碍物的距离、速度等信息,计算出合适的减速或转向指令,实现安全和平稳的行驶。
4. 应用案例二:温度控制系统中的模糊控制温度控制是很多工业生产过程中的常见问题,而模糊控制技术可以在这方面发挥重要的作用。
在温度控制系统中,通过模糊控制技术可以实现对温度的精确控制,提高生产过程的稳定性和效率。
以热处理工业过程为例,对于不同的热处理设备和工件,模糊控制系统可以根据设备和工件的特性,设定合适的温度范围和控制要求。
然后,通过温度传感器获取实时温度信息,将其输入到模糊控制系统中进行处理。
模糊控制系统会根据温度与设定值之间的差异,计算出合适的加热或冷却指令,控制加热或冷却装置的工作状态,使温度保持在设定范围内。
模糊控制应用实例模糊控制在自动驾驶中的应用实例自动驾驶技术是近年来备受关注的热门话题,它的出现旨在解决驾驶过程中的安全问题,并提高驾驶的便利性和舒适度。
而模糊控制作为自动驾驶技术中的重要一环,有着广泛的应用。
本文将以自动驾驶中的模糊控制为例,探讨其应用实例。
在自动驾驶的过程中,模糊控制被用来处理传感器数据,并作出相应的决策。
以自动驾驶汽车的转向控制为例,模糊控制可以根据车辆的位置、速度、前方障碍物等数据,决定车辆的转向角度,以保证车辆在道路上行驶的安全性和稳定性。
模糊控制通过模糊化处理将传感器数据转化为模糊集合。
例如,车辆的位置可以被模糊化为"靠左"、"靠右"、"居中"等模糊集合,车辆的速度可以被模糊化为"缓慢"、"中等"、"快速"等模糊集合。
然后,利用一系列的模糊规则来推导出车辆转向角度的模糊集合。
例如,如果车辆靠左,并且速度较快,那么转向角度可能是"向右转";如果车辆居中,并且速度较慢,那么转向角度可能是"保持直行"。
最后,通过去模糊化处理将模糊集合转化为具体的转向角度。
在自动驾驶中,模糊控制的应用不仅限于转向控制,还包括加速控制、制动控制等。
例如,在车辆的加速控制中,模糊控制可以根据车辆的加速度和前方障碍物的距离,决定车辆的加速度大小,以保证车辆在道路上的安全跟随。
同样,在车辆的制动控制中,模糊控制可以根据车辆的速度和前方障碍物的距离,决定车辆的制动力大小,以保证车辆在紧急情况下的安全停车。
除了在自动驾驶中的应用,模糊控制还广泛应用于其他领域。
例如,在温控系统中,模糊控制可以根据室内温度和设定温度,决定空调的制冷或制热强度,以保持室内的舒适温度。
在机器人的路径规划中,模糊控制可以根据环境的复杂性和机器人的速度,决定机器人的行走路径,以避免障碍物的碰撞。