adams约束与载荷的施加与修改
- 格式:doc
- 大小:4.11 MB
- 文档页数:16

ANSYS和ADAMS柔性仿真详细步骤解析步骤1:建立模型首先需要建立汽车悬挂系统的模型,包括车轮、悬架、车体等组成部分。
可以使用ANSYS的建模工具进行几何建模,也可以导入CAD模型进行后续处理。
步骤2:定义模型属性在ANSYS中,需要为模型定义材料属性、约束条件和加载条件。
对于悬挂系统,材料属性可以定义弹簧、阻尼器和悬挂臂的材料特性;约束条件可以设置车体和地面间的边界条件,例如固支或可移动支撑;加载条件可以设置车轮的载荷和运动。
步骤3:网格划分接下来需要对模型进行网格划分,将模型离散成小的单元,这些单元可以是三角形、四边形或立方体等形式。
网格划分的精细程度直接影响到仿真的准确性和计算速度。
步骤4:设置运动学和约束在ANSYS中,可以设置模型的运动学和约束条件,即定义汽车悬挂系统中各个部件的运动关系和限制。
例如,可以设置车轮的旋转和转向运动以及悬挂臂的运动自由度。
这些设置可以通过定义关节、连接、驱动器等方式来实现。
步骤5:施加载荷在ANSYS中,可以施加各种静态和动态的载荷,模拟实际工作条件下的受力情况。
例如,可以施加车轮产生的垂直载荷、离心力、横向力等。
载荷可以施加在车轮、悬挂臂或车体上,可以是静态的或随时间变化的。
步骤6:求解模型设置好加载条件后,可以开始求解模型并进行分析。
ANSYS会根据模型的几何形状、材料特性、约束条件和加载条件等参数进行计算,得到模型在各种受力情况下的应力、变形、振动等结果。
求解模型可能需要较长的计算时间,特别是对于复杂的模型。
步骤7:分析结果在求解完成后,可以对模型的分析结果进行后处理和可视化。
ANSYS提供了各种图形和数据输出选项,可以将结果以图像、表格或动画的形式展现出来。
在分析结果中,可以观察汽车悬挂系统各个部件的受力、变形、振动等情况,从而评估其性能和安全性。
ADAMS是一种基于多体动力学的仿真软件,能够模拟和分析多体系统的运动、受力、碰撞等特性。
这里以汽车悬挂系统为例进行详细解析。
上机实验三约束与载荷的施加与修改一、上机目的通过本次上机:1.掌握adams中旋转副、移动副、圆柱副、固定副等简单约束的施加和基本操作和绘制方法;2.掌握adams齿轮副、凸轮副等复杂约束的施加的操作和绘制方法;3.掌握adams运动约束的施加和基本操作和绘制方法;4.学会使用浮动菜单进行约束的修改操作。
5.掌握ADAMS载荷:单向力、单向力矩、组合力、组合力矩、混合力)、柔性力(弹簧力)等的施加和修改的基本操作和基本方法。
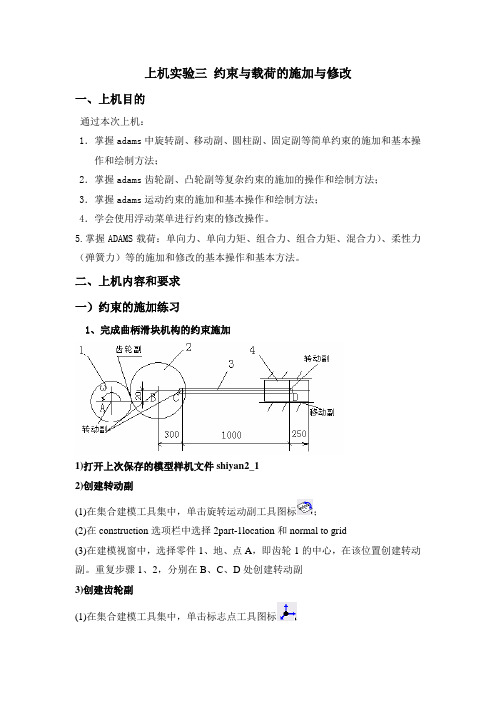
二、上机内容和要求一)约束的施加练习1、完成曲柄滑块机构的约束施加1)打开上次保存的模型样机文件shiyan2_12)创建转动副(1)在集合建模工具集中,单击旋转运动副工具图标;(2)在construction选项栏中选择2part-1location和normal to grid(3)在建模视窗中,选择零件1、地、点A,即齿轮1的中心,在该位置创建转动副。
重复步骤1、2,分别在B、C、D处创建转动副3)创建齿轮副(1)在集合建模工具集中,单击标志点工具图标(2)在主工具箱的选项栏中选择add to ground和global XZ(3)在建模视窗中,选择点(齿轮1与齿轮2)的交接附近,然后在该点创建标志点(4)在集合建模工具集中,单击齿轮运动副工具图标(5)在对话框中,鼠标放在选项栏join name中,点击右键——browse浏览约束,输入A、B处的铰链名;在velocity marker中,点击右键——browse浏览标志点,输入刚创建的标志点名,点击OK,实现创建齿轮副4)创建滑动副(1)在集合建模工具集中,单击滑动运动副工具图标;(2)在construction选项栏中选择2part-1location和pick feature(3)在建模视窗中,选择依次滑块4、地(4)选择点D下部某点作为移动副位置(5)移动鼠标使箭头水平,点击鼠标,生成移动副5)设置齿轮1的运动速度(1)在集合建模工具集中,单击旋转运动工具图标;(2)在speed文本框中输入60 r,定义转动速度为60rad/s(3)在建模视窗中,选择齿轮1上的转动副,创建运动约束6)修改约束(1)打开B 处的约束修改对话框:鼠标放在B上的铰链副joint上,单击右键—浮动菜单modify,打开运动修改对话框,使其约束由转动副变为圆柱副(2)打开齿轮1上的运动约束修改对话框,修改齿轮1的运动为往复运动:鼠标放在齿轮1上的运动副motion上,单击右键—浮动菜单modify,打开运动修改对话框,点击funcction(time)右侧的图标,打开编辑器对话框,在define a runtime function中输入:step(time,0,0,10,60)+step(time,10,60,20,-60)。

<EDEMMBD案例02>EDEM-Adams本案例包括以下⼏部分:1. 介绍2. 前提3. 问题描述4. 设置5. 求解6. 后处理1-介绍本案例EDEM-Adams耦合的⽅法,实现颗粒与⼏何体相互作⽤。
案例重点:Adams View⼏何体运动设置;Adams Co-Simulation Interface (ACSI)耦合EDEM计算。
2-前提本案例假定⽤户熟悉Windows软件界⾯风格,并对EDEM界⾯和Adams较为熟悉。
EDEM版本2018,Adams版本2018。
3-问题描述在翻⽃汽车卸料过程中,翻⽃(TIPPER)出⼝处于关闭状态,当物料撞击出⼝时,出⼝仓门(door)⾃动打开。
4-设置步骤⼀:确保EDEM软件中的运动⼏何名称与Adams中的⼀致,只是为了后⾯设置的⽅便,两软件统⼀⼏何体名称。
步骤⼆:前期⼯作,EDEM中已经⽣成了⼀定的颗粒,过程不再赘述,可以参考之前的类似案例。
Adams中添加了约束、运动和载荷,添加过程参考Adams其他案例。
步骤三:为了让EDEM中真实的颗粒对⼏何体作⽤⼒可以传递过来,需要在Adams中添加作⽤⼒(Applied Forces)。
因此,在Adams中对翻⽃(TIPPER)、仓门(door)、俩个液压杆(cylinder1\2)添加组合⼒(General Force),由六个沿地⾯坐标⽅向的⼒和⼒矩构成。
添加作⽤⼒:在Adams view中,点击菜单栏中的组合⼒按钮,在软件底部会有提⽰步骤,按照步骤选择TIPPER和ground,然后选择翻⽃的质⼼。
重复添加对其他部件的作⽤⼒施加。
步骤四:上⼀步只是建⽴了作⽤⼒关系,还没有具体的⼒的⼤⼩。
双击左侧树状菜单的GForce,弹出窗⼝。
Force Name是⾃动添加的,如果发现作⽤⼒添加错了,需要删掉重新添加,所以Name后的序号会发⽣改变,但是不影响后续计算。
具体设置参照图⽚:Define Using:SubroutineUser Parameters:0.0Routine:ACSI_Adams::重复修改其他部件的GForce步骤五:导出Adams设置,File>Export,弹出窗⼝,File type选择Adams Solver Dataset。


ADAMS相关参数设置1.ADAMS机械建模模块主要是进行标签定义,需要定义运动副和运动约束以及载荷的施加。
此模块需要在PROE建模时指定建立。
仿真分析模块,主要是定义仿真输出,进行动力学仿真求解分析。
仿真结果分析模块,主要是进行仿真结果显示,并定义仿真结果曲线的输出。
ADAMS仿真求解四个求解模块:ADAMS:MultiBodyDynamicsProcedure模块是进行动力学分析模块。
ADAMS:MultiBodyKinematicsProcedure模块是进行运动学分析模块。
ADAMS:MultiBodyStaticProcedure模块是进行静力学分析模块。
ADAMS:MultiBodyTransientProcedure模块是进瞬态分析模块。
2.抽象标签定义进行动力学分析,标签需要进行刚体定义。
标签定义没确定如何集成3.约束定义在proe_mechanism模块中进行定义。
4.材料定义材料定义:需要定义相关材料的密度等物理属性。
ADAMS的材料定义主要是密度的定义。
因为在多体动力学分析时,我们现在主要考虑的都是刚体,所以每个部件的质量定义是必须的。
5.Marker点定义载荷定义:内部热源、初始温度、外界温度边界、轨道参数等的定义。
6.边界条件定义载荷定义:内部热源、初始温度、外界温度边界、轨道参数等的定义。
7.仿真计算条件定义一、时间步长的定义编辑“ADAMS: Multi Body Kinematics Procedure”任务,主要是修改动力分析的工作时间和时间步长,并将ADAMS分析环境添加至分析任务,具体操作过程如下图所示。
二、ADAMS求解模块的定义此项主要是ADAMS求解器的单位定义。
在运用ADAMS求解时,为了与PROE联合,单位需要采用“MMKS”,即mm、kg、N、s及degree,具体设置如下图所示:注:ADAMS与PROE兼容的格式是*.x_t格式的几何文件,所以输入、输出最好采用此格式的文件。
《ADAMS入门详解与实例》读书报告专业:机械工程及自动化任课教师:黄亚宇姓名:林世伟学号: 200810301328班级:机自083千斤顶运动仿真模拟一、修改模型各项参数1.启动ADAMS/View,在弹出的欢迎对话框中选择导入文件(import a file),将千斤顶的文件v1.x_t文件复制到ADAMS文件目录下,之后确认单击OK,在弹出的导入文件对话框中,在文件类型(file type)中选择parasolid格式的文件,在file to read 后面的框中单击鼠标右键,单击browser,之后在弹出的对话框中选择要导入的文件v1.x_t,之后选择model name,在之后的框中单击右键,选择model——create,在弹出的对话框中修改模型名称,这里默认也可,单击OK,将模型导入ADAMS,如图1图12.设置单位和重力方向,由于导入的parasolid格式的文件默认单位是米制,所以要给导入的模型设置单位,在下拉菜单中选择settings,在下拉菜单中选择units即单位,在弹出的对话框中将length长度的单位设置为millimeter,其余默认即可,之后单击OK如图2。
图2 图3又由于导入的模型并不是按照ADAMS默认的重力方向建模,由图可知,此模型的重力方向为沿着Z轴,所以在seetings中选择gravity即重力,在弹出的对话框中勾选gravity即显示重力,点击+z由于在ADAMS中重力加速度方向与实际相反,所以此处为正值如图3。
至此,单位及重力加速度设置完毕。
设置模型材料,在任意一个构件上单击右键,在弹出的菜单中选择part分,在之后选择modify,即弹出对话框,由图可知,此模型虽然赋予了材料,但是数值太小,所以要重新赋予材料属性,首先将Category项设置为Mass Properties,之后在density mass by 后的选项框中选择Geometry and Material Type,再在Material Type的输入框中单击鼠标右键,在弹出的菜单中选则Material——Guesses——steel即设置材料为刚,单击OK按钮后,此构件的材料属性就定义成功,在构件上产生了一个质心坐标系。
上机实验三约束与载荷的施加与修改一、上机目的通过本次上机:1.掌握adams中旋转副、移动副、圆柱副、固定副等简单约束的施加和基本操作和绘制方法;2.掌握adams齿轮副、凸轮副等复杂约束的施加的操作和绘制方法;3.掌握adams运动约束的施加和基本操作和绘制方法;4.学会使用浮动菜单进行约束的修改操作。
5.掌握ADAMS载荷:单向力、单向力矩、组合力、组合力矩、混合力)、柔性力(弹簧力)等的施加和修改的基本操作和基本方法。
二、上机内容和要求一)约束的施加练习1、完成曲柄滑块机构的约束施加1)打开上次保存的模型样机文件shiyan2_12)创建转动副(1)在集合建模工具集中,单击旋转运动副工具图标;(2)在construction选项栏中选择2part-1location和normaltogrid(3)在建模视窗中,选择零件1、地、点A,即齿轮1的中心,在该位置创建转动副。
重复步骤1、2,分别在B、C、D处创建转动副3)创建齿轮副(1)在集合建模工具集中,单击标志点工具图标(2)在主工具箱的选项栏中选择addtoground和globalXZ(3)在建模视窗中,选择点(齿轮1与齿轮2)的交接附近,然后在该点创建标志点(4)在集合建模工具集中,单击齿轮运动副工具图标(5)在对话框中,鼠标放在选项栏joinname中,点击右键——browse浏览约束,输入A、B处的铰链名;在velocitymarker中,点击右键——browse浏览标志点,输入刚创建的标志点名,点击OK,实现创建齿轮副4)创建滑动副(1)在集合建模工具集中,单击滑动运动副工具图标;(2)在construction选项栏中选择2part-1location和pickfeature(3)在建模视窗中,选择依次滑块4、地(4)选择点D下部某点作为移动副位置(5)移动鼠标使箭头水平,点击鼠标,生成移动副5)设置齿轮1的运动速度(1)在集合建模工具集中,单击旋转运动工具图标;(2)在speed文本框中输入60r,定义转动速度为60rad/s(3)在建模视窗中,选择齿轮1上的转动副,创建运动约束6)修改约束(1)打开B处的约束修改对话框:鼠标放在B上的铰链副joint上,单击右键—浮动菜单modify,打开运动修改对话框,使其约束由转动副变为圆柱副(2)打开齿轮1上的运动约束修改对话框,修改齿轮1的运动为往复运动:鼠标放在齿轮1上的运动副motion上,单击右键—浮动菜单modify,打开运动修改对话框,点击funcction(time)右侧的图标,打开编辑器对话框,在define aruntimefunction中输入:step(time,0,0,10,60)+step(time,10,60,20,-60)。
7)保存文件为shiyan3_1,在E:\jiben06\20063377目录中,退出adams/view2、完成凸轮机构的约束施加(1)、打开上次保存的模型样机文件shiyan2_2(2)、创建转动副1)在集合建模工具集中,单击旋转运动副工具图标;2)在construction选项栏中选择2part-1location和nomalgrid3)在建模视窗中,选择零件1、地,点A,即圆柱1的中心,在该位置创建转动副(3)、创建移动副1)在集合建模工具集中,单击滑动运动副工具图标;2)在construction选项栏中选择2part-1location和pickfeature3)在建模视窗中,依次选择滑块2、支座4)选择点圆柱滑块轴线上一点作为运动副位置5)移动鼠标使箭头垂直,点击鼠标,生成移动副(4)、创建凸轮副1)在集合建模工具集中,单击点-线凸轮运动副工具图标;2)在选项栏point-curve中选择curse3)在建模视窗中,依次选择圆柱滑块顶点、齿轮1圆线,完成创建凸轮(5)、创建固定副1)在集合建模工具集中,单击锁工具图标;2)在construction选项栏中选择2part-1location和nomalgrid3)在建模视窗中,依次选择支座、地,在某一位置点击右键完成支座的固定5、设置圆柱1的运动速度1)在集合建模工具集中,单击旋转运动工具图标;2)在speed文本框中输入80r,定义转动速度为80rad/s3)在建模视窗中,选择圆柱1上的转动副,创建运动约束4)保存文件为shiyan3_2,在E:\jiben06\20063377目录中,退出adams/view 二)载荷的施加与修改练习1、按图示要求施加载荷1)施加驱动力(1)重新打开文件shiyan3_1,在主工具箱中,右键单击图标,打开下一级力工具集按钮,单击施加单向力矩工具图标;(2)在选项栏value中,选择constant输入值500N(3)在建模视窗中,依次选择圆柱1、A点,完成创建施加单向驱动力矩2)施加单向变力F(1)在主工具箱中,右键单击图标,打开下一级力工具集按钮,单击施加单向力工具图标;(2)在选项栏value 中,选择c ustom(3)在建模视窗中,依次选择滑块、E 点,完成创建施加单向力(4)把鼠标放在E 点力附近,点击右键——modify 打开修改力对话框,点击function 右侧的图标,打开编辑器对话框,在definearuntimefunction 中,定义力F (time,⋯)=(SIGN(1000,-VX(点)),点处输入力所在滑块上 的一个标记,是力作用的I 点。
I 点复制方法:鼠标放在力F 附近,点击右键,通过快捷菜单,选择F ORCE_1 ——info ——拷贝其中I 标记点即可。
(5)单击ok,退出力修改对话框(6)保存文件shiyan3_3在E :\jiben06\20063377目录中,退出adams 3)施加作用力(1)在主工具箱中,右键单击图标,打开下一级力工具集按钮,单击施加 单向力工具图标;(2)在选项栏v alue 中,选择c onstant 输入值200N ,construction 中选择p ickfeature ; (3)在建模视窗中,依次选择滑块、D 点,完成创建施加单向作用力。
2、施加弹簧力弹簧的质量刚度系数为200N/s,阻尼系数C=30kg/s。
1)重新打开文件shiyan3_2,在集合建模工具集中,单击施加弹簧力工具图标;2)在选项栏中分别选中K、C,并输入K、C的值3)在建模视窗中,依次选择圆柱滑块底部中心点A、支座内B点,完成创建弹簧力4)保存文件shiyan3_4在E:\jiben06\20063377目录中,退出adams三)练习起重机的建模和仿真,如下图所示。
1)启动ADAMS6.运行ADAMS,选择createanewmodel;7.modalname中命名为lift_mecha;8.确认gravity文本框中是earthnormal(-globalY),units文本框中是MKS;ok9.选择setting——workinggrid,在打开的参数设置中,设置size在X和Y方向均为20m,spacing在X和Y方向均为1m;ok10.通过缩放按钮,使窗口显示所有栅格,单击F4打开坐标窗口。
2)建模1.查看左下角的坐标系为XY平面2.选择setting——icons下的newsize图标单位为13.在工具图标中,选择实体建模按钮中的box按钮4.设置实体参数;OngroundLength:12Height:4Depth:85.鼠标点击屏幕上中心坐标处,建立基座部分6.继续box建立Mount座架部件,设置参数:NewpartLength:3Height:3Depth:3.5设置完毕,在基座右上角建立座架Mount部件7.左键点击立体视角按钮,查看模型,座架Mount不在基座中间,调整座架到基座中间部位:①右键选择主工具箱中的position按钮图标中的move按钮②在打开的参数设置对话框中选择Vector,Distance项中输入3m,实现Mount移至基座中间位置③设置完毕,选择座架实体,移动方向箭头按Z轴方向,Distance项中输入2.25m,完成座架的移动右键选择座架,在快捷菜单中选择rename,命名为Mount11.选择setting—workinggrid打开栅格设置对话框,在setlocation中,选择pick 选择Mount.cm座架质心,并选择X轴和Y轴方向,选择完毕,栅格位于座架中心选择主工具箱中的视角按钮,观察视图将spacing—workinggrid,设置spacing中X和Y均为0.512.选择圆柱实体绘图按钮,设置参数:NewpartLength:10mRadius:1m选择座架的中心点,点击左侧确定轴肩方向,建立轴肩,单击三维视图按钮,观察视图13.继续圆柱工具,绘制悬臂①设置参数:NewpartLength:13mRadius:0.5m②选择Mount.cm作为创建点,方向同轴肩,建立悬臂③右键选择新建的悬臂,在快捷菜单中选择part_4——Rename,命名为boom④选择悬臂,移动方向沿X轴负向,实现悬臂的向左移动:1)右键选择工具箱中的position按钮中的move按钮2)在打开的参数对话框中,选择vector,distance中输入2m,点击悬臂,实现移动⑤右键点击实体建模按钮,在弹出的下一级菜单中选择导圆角工具,设置圆角半径为1.5m⑥左键选择座架上侧的两条边,点击右键,完成倒角14.选择box按钮图标,创建铲斗①设置参数:NewpartLength:4.5Height:3.0Depth:4.0②选择悬臂左侧中心点,命名为bucket,建立铲斗③右键选择position按钮下一级按钮move按钮④在打开的参数对话框中,选择vector,distance中输入2.25m,选择铲斗,移动方向沿全部坐标系X轴负方向,实现铲斗的横向移动⑤在主工具箱中,选择三维视图按钮,察看铲斗⑥继续选择move按钮,设置参数中选择vector,distance中输入2.0m,选择铲斗,移动方向沿全部坐标系Z轴负方向,实现铲斗的纵向移动⑦移动完毕,选择主工具箱中的渲染按钮render,察看三维实体效果,再次选择render按钮,实体图则以线框显示⑧右键点击实体建模按钮,再弹出的下一级按钮中选择倒角工具,在打开的参数设置对话框中,设置倒角Width为 1.5m,⑨选择铲斗下侧的两条边,完毕单击右键,完成倒角⑩右键选择实体建模工具按钮,再下一级按钮中选择Hollow按钮,在打开的参数设置对话框中设置参数Thickness为0.25m选择铲斗为挖空对象,铲斗上平面为工作平面,完毕点击右键挖空铲斗3)添加约束,根据图示关系,添加链接①在主工具箱中,选择转动副,下方的参数设置对话框中,设置参数2bod ——1loc和pickfeature②选择基座和座架,然后选择座架中心Mount.cm,旋转轴沿y轴正向,建立座架与基座的转动副③继续用转动副按钮,建立轴肩与座架间的转动副,设置参数为2bod——1loc 和Normaltogrid,选择轴肩和座架,再选择座架中心点,建立转动副④继续用转动副按钮,建立铲斗与悬臂间的转动副,设置参数为2bod——1loc 和Normaltogrid,选择铲斗与悬臂,再选择铲斗下侧中心点,建立转动副⑤选择主工具箱中的平动副,设置参数2bod——1loc和pickfeature,选择悬臂与轴肩,再选择悬臂中心标记点,移动方向沿X轴正方向,建立悬臂和轴肩间的平动副⑥右键点击窗口右下角的Information信息按钮,选择约束按钮,观察是否按要求施加约束,关闭信息窗口⑦检查完毕,选择仿真按钮,对系统进行仿真,观察系统在重力作用下的运动4)添加运动①选择主工具箱中的旋转运动按钮,右键点击座架中心标记点,在弹出的选择窗口中,选择JOINT_mount_ground,给座驾与基座的转动副添加转动运动②选择俯视图按钮,观察旋转运动副的箭头图标③右键点击该运动,在弹出的快捷菜单中选择motion_mount_ground——modify在修改对话框中,修改function项为360d*time④重复上述动作,在轴肩和座架之间建立旋转运动Motion_shoulder_ground,⑤右键点击该运动,在弹出的快捷菜单中选择motion_shoulder_ground——modify在修改对话框中,修改function项为-STEP(time,0,0,0.10,30d)⑥重复上述动作,在铲斗和悬臂之间建立旋转运动Motion_bucket_boom⑦设置运动函数为45d*(1-cos(360d*time))⑧右键点击主工具箱中旋转运动按钮,选择下一级平行运动按钮,点击悬臂中心平动副,在悬臂和座架间建立平行运动⑨设置平行运动函数为STEP(time,0.8,0,1,5)⑩选择主工具箱中的仿真按钮,设置仿真参数ENDTime:1;Steps:100,进行仿真5)铲斗施加载荷(1)在主工具箱中,右键单击图标,打开下一级力工具集按钮,单击施加单向力工具图标;(2)在选项栏依次选择spacefixed;constant输入值2000N,construction中选择pickfeature;(3)在建模视窗中,依次选择铲斗、铲斗质点,箭头向下,完成创建施加铲斗单向作用力。