矩阵微分运算
- 格式:docx
- 大小:78.57 KB
- 文档页数:2
矩阵微积分规则
矩阵微积分是对矩阵进行微积分运算的一种方法,它包括了一系列的规则和定理。
以下是一些常见的矩阵微积分规则:
1. 矩阵加法规则:对于两个相同维度的矩阵A和B,它们的
和用A + B表示,其中每个对应位置上的元素相加。
2. 矩阵标量乘法规则:给定一个矩阵A和一个实数k,矩阵A 乘以k表示每个元素都乘以k。
3. 矩阵乘法规则:对于两个矩阵A和B,它们的乘积用A × B
表示,其中结果矩阵的每个元素都是A的对应行与B的对应
列的乘积之和。
4. 转置规则:给定一个矩阵A,它的转置用A^T表示,即将
A的行和列互换。
5. 矩阵求导规则:对于一个矩阵函数f(X)(其中X是一个矩阵),它的导数用∂f(X)/∂X表示,是一个与X相同维度的矩阵,其中每个元素都是f关于X中对应元素的导数。
6. 行列式规则:对于一个n×n的矩阵A,它的行列式用|A|表示,表示一个数字,它的计算涉及矩阵的元素和它们的代数运算。
7. 逆矩阵规则:对于一个n×n的可逆矩阵A,它的逆矩阵用
A^(-1)表示,满足AA^(-1) = A^(-1)A = I,其中I是单位矩阵。
这些规则是矩阵微积分中常用的一些基本规则,可以用于求导、解方程、计算行列式等各种问题。
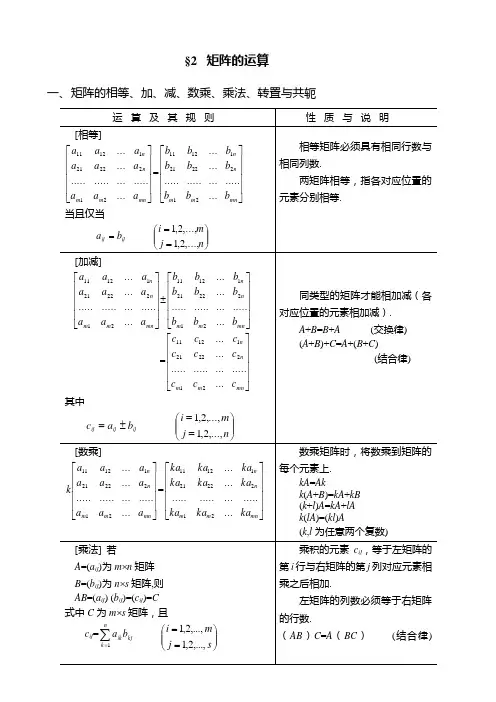
§2 矩阵的运算一、矩阵的相等、加、减、数乘、乘法、转置与共轭(A +B )=A +B (kA )=kA (k 为任意复数) (AB )τ=BA (反序定律)(A 1A 2...A s )=τττ12...A A A s(A k )=(A )k (k 为整数)二、 矩阵的初等变换与初等矩阵设I =⎥⎥⎥⎥⎤⎢⎢⎢⎢⎡10101,称为单位矩阵.用数k(0)乘矩阵的第i 列(或行)初等变换具有性质:1° 任何矩阵(a ij )都可经过有限次初等变换化为对角矩阵(a ij )⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡0001012° 初等变换不改变矩阵的秩.三、 矩阵的微积分假设矩阵A 的元素a ij 都是参数t 的函数,那末1° 矩阵A 的导数定义为⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡==t a t a ta t a t a tat a t a t a A tA mn m m n n d d ...d d d d ............d d ...d d d d d d ...d d d d d d 212222111211同样可定义矩阵的高阶导数. 2° 矩阵A 的积分定义为⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰t a t a ta t at at a t a t a ta t A mn m m n nd ...d d ............d ...d d d ...d d d 212222111211同样可定义矩阵的多重积分.四、 特殊矩阵[零矩阵与零因子] 元素a ij 全为零的矩阵称为零矩阵,记作O =(0)=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡0...00............0 (00)0 (00)零矩阵具有性质:O +A =A +O =A OA =AO =OA +(-A )=O ,-A 称为A 的负矩阵若A ,B 为非零矩阵,即A ≠O ,B ≠O ,而AB =O ,则称矩阵A 为矩阵B 的左零因子,矩阵B 为矩阵A 的右零因子,例如A =⎥⎦⎤⎢⎣⎡--1111,B =⎥⎦⎤⎢⎣⎡--1111 AB =⎥⎦⎤⎢⎣⎡--1111⎥⎦⎤⎢⎣⎡--1111=⎥⎦⎤⎢⎣⎡0000=O[对角矩阵] 主对角线以外的元素都是零(d ij =0,i ≠j )的方阵称为对角矩阵,记作D =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n d d d 0...021=diag(d 1,d 2,...,d n )=[ d 1 d 2 ... d n ] 对角矩阵具有性质: 1° 左乘BDB =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n d d d 0021⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n n n b b b b b b b b b .....................212222111211=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n n n n n n b d b d b d b d b d b d b d b d b d ............... (2)12222221211121111 =)(ij i b d 2° 右乘BBD =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n n n b b b b b b b b b (2)12112111211⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n d d d 0021=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n n n n n n b d bd b d b d b d bd b d b d b d (2211222)22111122111 3° 两个对角矩阵的和、差、积仍为对角矩阵.[数量矩阵] d i =d (i =1,2,...,n )的对角矩阵称为数量矩阵,记作D =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡d d d00 =[d d... d ]显然DB =BD =dB .[单位矩阵] d =1的数量矩阵称为单位矩阵,记作 I =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡10101 =「1 1 ... 1」显然IB =BI =B .[对称矩阵] 满足条件a ij =a ji (i ,j =1,2,...,n )的方阵A =(a ij )称为对称矩阵.例如A =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--423261315 是对称矩阵.对称矩阵具有性质: 若A ,B 都是对称矩阵,则A A=τ,且A -1(使A -1=A -1A =I 的矩阵.详见本节,六),A m (m 为正整数),A +B 仍是对称矩阵.[实对称矩阵]实对称矩阵按其特征值(本节,七)可分为正定矩阵,半正定矩阵、负定矩阵、半负定矩阵和不定矩阵,它们的定义与充分必要条件如下[反对称矩阵] 满足条件⎩⎨⎧-=jiij a a 0 )()(j i j i ≠= (i ,j =1,2,...,n )的方阵A =(a ij )称为反对称矩阵.例如A =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---023201310 是反对称矩阵.反对称矩阵具有性质:1° 若A ,B 都是反对称矩阵,则A τ=-A ,且A -1, A +B 仍是反对称矩阵,A m 为⎩⎨⎧反对称矩阵对称矩阵)()(为奇数为偶数m m2° 任意方阵A 都可分解为一个对称矩阵B =(b ij )与一个反对称矩阵C =(c ij )之和,即A =B +C只需取b ij =21 (a ij +a ji ),c ij =21(a ij -a ji )(i ,j =1,2,...n )[埃尔米特矩阵] 满足条件A τ=A的方阵A 称为埃尔米特矩阵.例如A =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--++-4232231212215i i i i i i 是埃尔米特矩阵.埃尔米特矩阵具有性质:若A ,B 都是埃尔米特矩阵,则1-A ,A +B 仍是埃尔米特矩阵.若A 又是实方阵(即a ij 全为实数),则A 就是对称矩阵.[反埃尔米特矩阵] 满足条件A τ=A -的方阵A 称为反埃尔米特矩阵.例如A =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+--+-05250212210i i i i i i 是反埃尔米特矩阵.反埃尔米特矩阵具有性质: 若A ,B 都是反埃尔米特矩阵,则1-A , A +B 仍是反埃尔米特矩阵.若A 又是实方阵,则A 就是反对称矩阵.[正交矩阵] 满足条件A τ=1-A的方阵A 称为正交矩阵.例如 A =⎥⎦⎤⎢⎣⎡-θθθθcos sin sin cos 是正交矩阵.正交矩阵具有性质:若A =(a ij )和B 都是正交矩阵,则 1° 1-A , AB 仍是正交矩阵. 2° det A =±1.3° ⎩⎨⎧=∑=011n k jk ik a a )()(j i j i ≠=⎩⎨⎧=∑=011n k kj ki a a )()(j i j i ≠=[酉(U )矩阵] 满足条件1-=A A τ的方阵A 称为酉(U )矩阵.例如:A =⎥⎦⎤⎢⎣⎡00i i 是酉矩阵.酉矩阵具有性质:若A =(a ij )和B 都是酉矩阵,则 1° A -1,AB 仍是酉矩阵. 2° det A ∙det A =1.3° 若A 又是实方阵,则A 是正交矩阵.[带型矩阵] 满足条件a ij =0 )(m j i >-的方阵A =(a ij )称为带型矩阵.2m +1称为带宽.一般形式为A =⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡--++++nn mn n n m n n n n m a a a a a a a,,1,11,11,11100[三角矩阵] 满足条件a ij =0 (i >j )的方阵A =(a ij )称为上三角形矩阵,一般形式为A =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n a a a a a a 022211211 满足条件()j i b ij <=0的方阵()ij b B =称为下三角形矩阵,一般形式为B =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n b b b b b b 212221110 三角形矩阵具有性质:1° 任何秩为r 的方阵C 的前r 个顺序的主子式不为0时,C 可表为一个上三角形矩阵A与一个下三角形矩阵B 的乘积,即C =AB2° 上(或下)三角形矩阵的和、差、积及数乘仍是上(或下)三角形矩阵.[分块矩阵] 用水平和垂直虚线将矩阵A 中的元素的阵列分成小块(称为子阵),A 就成为分块矩阵.例如A =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡333231232221131211a a a a a a a a a =⎥⎦⎤⎢⎣⎡22211211B B B B 式中B 11=⎥⎦⎤⎢⎣⎡22211211a a a a,B 12=⎥⎦⎤⎢⎣⎡2313a a B 21=[]3231a a , B 22=[]33a 它们都是A 的子阵. 进行分块矩阵的运算时,可将子阵当作通常矩阵的元素看待.这些运算指加、减、乘法、数乘、转置与共轭等.[分块对角矩阵] 主对角线上的子阵都是方阵,其余子阵都是零矩阵的分块矩阵称为分块对角矩阵.一般形式为A =⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡kkB O B O O O B 2211 分块对角矩阵A 的逆矩阵A -1和A 的行列式可以用下面简单公式求出A -1=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡---1122111KK B OB O Bdet A =det B 11·det B 22·...·det B kk注意,一般分块矩阵的行列式不能用把子阵当作通常矩阵的元素的方法来计算,例如把四阶方阵化为分块矩阵A =⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡44434241343332312423222114131211...........................a a a a a a a a a a a a a a a a =⎥⎦⎤⎢⎣⎡22211211B B B B 一般det A =det B 11·det B 22-det B 21·det B 12不成立(参见§1,二,3中的四阶行列式).五、 相似变换[相似变换] 如果有一非奇异矩阵X (即det X ≠0)使得B =1-X AX那末称矩阵A 与矩阵B 相似,也称A 经相似变换化为B ,记作A ~B .它具有下列性质: 1° A ~A ,AA .2° 若A ~B ,则BA .3° 若A ~C ,B ~C ,则A ~B .4° 1-X (A 1+ A 2+...+ A m )X =1-X A 1X + 1-X A 2X + ...+ 1-X A m X 5° 1-X (A 1 A 2 ...A m )X =1-X A 1 X ·1-X A 2 X ·... ·1-X A m X 6° 1-X A m X =( 1-X AX )m7° 若)(A f 为矩阵A 的多项式,则1-X )(A f X =)(1AX X f -8° 若A ~B ,则A 与B 的秩相同,即rank A =rank B . A 与B 的行列式相同,即det A =det B .A 与B 的迹(定义见本节,七)相同,即tr A =tr B . A 与B 具有相同的特征多项式和特征值(本节,七).[正交变换] 若Q 为正交矩阵(即1-Q =Q τ),则称Q τAQ 为矩阵A 的正交变换,其性质与相似变换类似.特别还有性质: 对称矩阵A 经正交变换后仍是对称矩阵.[旋转变换] 取正交矩阵U 为)(p)(qU pq =(u ij )=)()(11cos sin 11sin cos 11q p ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡θθ-θθ 即u pp =u qq =θcosu pq =-u qp =θsin u ii =1 (i ≠p,q )u ij =0 (i,j ≠p,q;i ≠j ) 这时称B =pq pq AU U τ为A 的旋转变换,称为旋转角,如果A 是对称矩阵,那末B 的元素b ij 与A 的元素a ij 有 如下对应关系:⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=θ+θ=θ-θ=θ-θ+θθ-==θ+θθ+θ=θ+θθ-θ=ijijqj pj qj qj pj pj pq qq pp qp pqqq pq pp qq qq pq pp pp a b a a b a a b a a a b b a a a b a a a b cos sin sin cos )sin (cos cos sin )(cos cos sin 2sin sin cos sin 2cos 222222)其他元素(),(),(q p j q p j ≠≠同时有性质:∑=nj i ija1,2=∑=nj i ij b 1,2∑=ni iia 12∑=≤ni ii b 12 若取旋转角pqpp qq a a a 2cot arc 21-=θ则旋转变换使0==qp pq b b六、 逆矩阵[逆矩阵及其性质] 若方阵A ,B 满足等式AB=BA=I (I 为单位矩阵)则称A 为B 的逆矩阵,或称B 为A 的逆矩阵,记作A=1-B 或B=1-A这时A,B 都称为可逆矩阵(或非奇异矩阵,或满秩矩阵).否则称为不可逆矩阵(或奇异矩阵,或降秩矩阵).可逆矩阵具有性质:1° 若A,B 为可逆矩阵,则AB 仍为可逆矩阵,且111)(---=A B AB (反序定律)一般地,若A 1 ,A 2 ,…,A s 为可逆矩阵,则=-121)(s A A A 11121---A A A s2° 矩阵A 可逆的充分必要条件是:det A ≠0.3° 若矩阵A 可逆,则det 1-A ≠0 且 det 1-A =(det 1)-A11)(--A =A , 111)(---=A a aA (a ≠0)1)(-τA =(1-A )τ,()()11--=A A4° 矩阵A 可逆的充分必要条件是:矩阵A 的特征值全不为零.[伴随矩阵与逆矩阵表达式] 设A ij 为矩阵A =(a ij )的第i 行第j 列元素a ij 的代数余子式,则矩阵A *=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn nnn n A A A A A A A A A (2122212)12111称为矩阵A 的伴随矩阵.若A 为非奇异矩阵,即det A ≠0,则A 的逆矩阵表达式为AA A det *1=-注意,A *的第i 行第j 列元素是A 的第j 行第i 列元素的代数余子式.[对角矩阵的逆矩阵] 对角矩阵D =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n d d d 0...021, d i ≠0 (i =1,2,...,n )的逆矩阵为D -1=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡---112110...0n d d d 显然对角矩阵的逆矩阵仍是对角矩阵.[三角形矩阵的逆矩阵] 三角形矩阵L =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n l l l l l l ...............0...0...21222111, 00=≠ij ii l l )(),...,2,1(i j n i >= 的逆矩阵为1-L =P =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n p p p p pp ...............0...0 (02)1222111 式中iiii l p 1=(i =1,2,...,n )∑-=-=11i jk kj ikiiij p ll p⎪⎪⎭⎫ ⎝⎛+=-=n j i n j ,...,11,...,2,1 0=ij p)(i j >显然非奇异下(上)三角形矩阵的逆矩阵仍是下(上)三角形矩阵.[正定矩阵的逆矩阵] 1° 高斯—若当法正定矩阵A =(a ij )的逆A -1=(b ij )可由下列递推公式求出:)1(11)(1-=k k nnaa, )1(11)1(1)(1,----=k k jk j n aa a, )1(11)1(1)(,1---=k k i k ni a a a)1(11)1(1)1(1)1()(1,1-------=k k jk i k ij k j i aa a a a )2,...,1,,(-=n n j i ij n ij a a =)((k=1,2,...,n )最后得到)(n ijij a b = 式中n 为该正定矩阵A 的阶. 2° 三角阵法 其步骤如下:(1) 把正定矩阵A =(a ij )表示为A =ΛD Λτ式中D 为实的非奇异对角矩阵D =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n d d d 0021为实的非奇异下三角矩阵.Λ=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡λλλλ-1111,2121n n n n是的转置矩阵.d i (i =1,2,...,n )与λij (i =2,...,n;j=1,…,n )由下面递推公式算出:0=ij λ)(i j > 1=λii ),...,2,1(n i =∑-=-=11j k jk ik ij ij x a x λ)1,...,2,1;,...,2(-==i j n ijij ij d x =λ)1,...,2,1;,...,2(-==i j n i∑-=-=11i k ik ik ii i x a d λ),...,2,1(n i =(2)求出D 的逆矩阵1-D =⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡n d d d 11121(3)求出Λ的逆矩阵1-Λ=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡1112121 n n ρρρ 式中⎪⎩⎪⎨⎧=-=∑-=11ii i jk kjik ij ρρλρ ),...,2,1(),...,2,1;1,...,2,1(n i n j j i n j =++=-=(4)求出A 的逆矩阵1-A =(ΛD 1)-τΛ=(1-Λ)τ1-D 1-Λ =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n n n βββββββββ212222112111式中∑==nik kkjki ij d ρρβ ),,2,1;,,2,1(n i i j ==注意,这种方法的好处是避免了求平方根的运算.[分块矩阵的逆矩阵] 设非奇异矩阵A 的分块矩阵为A =⎥⎦⎤⎢⎣⎡22211211B B B B 式中B 11,B 22为方子阵,那末A 的逆矩阵A -1=⎥⎦⎤⎢⎣⎡22211211C C C C由下面公式求出111211211111111212221221211112112111212222)(-------=-=-=-=B B C B C B B C C C B B C B B B B C[初等变换法求逆矩阵] 设1-A =1212222111211...........................-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n n n a a a a a a a a a =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n n n b b b b b b b b b 212222111211=B 对矩阵⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡100010001212222111211 nn n n n n a a a a a a a a a 作一系列行的初等变换,使虚线左边一块矩阵化为单位矩阵,而右边一块单位矩阵就变为A 的逆矩阵B =A -1,即⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n n n b b b b b b b b b212222111211100010001[逆矩阵的近似求法] 设10-A 为矩阵A 的初始近似逆矩阵,可由下列迭代公式求出更精确的逆矩阵:)2(1111---+-=n n n AA I A A (n=0,1,2,...)式中I 为与A 同阶的单位矩阵.[计算机求逆程序的检验矩阵] 用下列n 阶非奇异矩阵及其逆矩阵,来检验大矩阵求逆的计算程序.A =⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡++-+------+-++222210221211210002112100002112122100021222n n n n n n1-A =⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡--------n n n n n n n n n n n n n13211432341223111221七、 特征值与特征矢量[特征值与特征矢量] 对n 阶方阵A =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n n n a a a a a a a a a 212222111211 和n 维非零列矢量α=(a 1,a 2,...,a n )τ如果有一个数λ,使得A α=λα则称λ为矩阵A 的特征值(特征根),α为矩阵A 的特征值λ所对应的特征矢量. 矩阵A 的所有特征值中绝对值最大的一个称为A 的第一特征值.[特征矩阵特征多项式特征方程] n 阶方阵A =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡nn n n n n a a a a a a a a a 212222111211 的特征矩阵定义为=-I A λ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---λλλnn n n n n a a a a a aa a a212222111211 式中I 为n 阶单位矩阵.行列式|A -λI |称为矩阵A 的特征多项式,记作()=|-A λI |方程()=0称为矩阵A 的特征方程.[矩阵的迹与谱] n 阶方阵A 的主对角线上各元素之和称为A 的迹,记作∑==ni ii a A 1tr特征方程()=0的n 个根1,2,...,n 就是矩阵A 的n 个特征值.集合{1,2,...,n }称为矩阵A 的谱,记作ch A .线性齐次方程组0)(=-αλI A i的非零解便是矩阵A 的特征值i 所对应的特征矢量.[特征值与特征矢量的性质]1° 设1,2,...,n 为n 阶方阵A 的n 个特征值,则A k 的特征值为k n k k λλλ,,,21 (k 为正整数). A 的逆矩阵A -1的特征值为11211,,,---n λλλ .A 的伴随矩阵A *的特征值为A A A n 11211,,,---λλλ .2° n 阶方阵A 的n 个特征值之和等于A 的迹,矩阵A 的n 个特征值之积等于A 的行列式,即1+2+...+n =a 11+a 22+...+a nn12...n =A由此可以推出矩阵可逆的另一充分必要条件是:A 的所有特征值都不为零. 3° 若i 是特征方程的k 重根,则对应于i 的线性无关的特征矢量的个数不大于k .当i 为单根时,对应于i 的线性无关特征矢量只有一个.4° 矩阵A 的不同特征值所对应的特征矢量线性无关.若n 阶方阵A 对应于特征值1,2,...,s 的线性无关的特征矢量分别有k 1,k 2,...,k s个,则这∑=s i i k 1个特征矢量线性无关,且n k si i ≤∑=1.5° 实对称矩阵的特征值都是实数,并且有 n 个线性无关(而且是正交)的特征矢量. 6° 矩阵的特征值在相似变换下保持不变,特别,A τ与A 具有相同的特征值.[求第一特征值的迭代法] 在实际问题中,往往不要求算出矩阵A 的全部特征值,只需算出第一特征值,用迭代法计算如下:⎩⎨⎧=λ=α++b αα)0()1()1(1)(k k k A )2,1,0( =k 假定当ε<-+)1()(m m αα时,可以认为(k ) ≈(m +1),那末迭代到m k =即可.这时)1(1+m λ为矩阵A 的第一特征值的近似值,(m +1)为所对应的特征矢量.[求实对称矩阵的雅可比法] 设n 阶实对称矩阵A =(a ij )的特征值是1,2,...,n ,则必存在一正交矩阵Q ,使得Q τAQ =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡λλλn 0021为对角矩阵.正交矩阵Q 可用一系列旋转矩阵的积来逼近:Q =∏pq U式中)()(11cos sin 11sin cos 11)()()(q p u U q p ij pq⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-==θθθθ取pqpp qq a a a 2cot arc 21-=θ因为在这种旋转变换下,消去了矩阵中位于第p 行第q 列(p ≠q )交点上的元素(见本节,五),而矩阵所有元素的平方和保持不变,而且对角线上的元素的平方和增大,因而非对角线元素的平方和随之减小,因此,当旋转次数足够大时,可使非对角线元素的绝对值足够小.对于预先给定的精度>0,如果|a ij |<(i ≠j ),则可认为a ij ≈0.于是得到求矩阵A 的特征值与特征矢量的具体迭代方法.1° 按以下递推公式求特征值1,2,...,n :⎪⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎪⎨⎧+=θ=⎪⎪⎩⎪⎪⎨⎧<+->-+=θ=⎪⎩⎪⎨⎧<ςς++ς-≥ςς++ς=θ=-=θ=ς--2221212)()()(1sin )0(11)0(112tan )0()1()0()1(tan 22cot k k k k k k k k k kk k k k k k k k pq k pp k qq k t t s t t t t t t v t a a a⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧===≠≠=≠-+=≠+-=+=-=+++++),2,1(),,2,1,(),,,()()()()()1()1()()()()1()()()()1()()()1()()()1( k n j i a a q p j q p i a a q j a a s a a p j a a s a a a t a a a t a a ij ij kijk ijk qj k k pj k k qj k qj k pj k k qj k k pj k pj k pqk k qq k qq k pqk k pp k pp υυ假定当)()(j i a m ij ≠<ε时,可以认为0)(≈m ij a ,则迭代到1-=m k 即可.而取)(m iia 作为i的近似值:),,2,1(n i a miii =≈λ2° 求特征矢量 从1°有m m m m U U AU U U U 1111-- τττ=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n λλλ0021记P m =U 1…U m-1U m则AP m = P m ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n λλλ0021所以P m 为特征矢量矩阵.P m 由下列递推公式算出:)1,,2,1(),,2,1,(),,2,1(),()()()1()()1()()()()1()()()()1(-=⎪⎪⎪⎩⎪⎪⎪⎨⎧===≠=-+=+-=+++m k n j i u u n i q p j u u u u s u u u u s u u ijij k ijk ij k iq k k ip k k iq k iq k ip k k iq k k ip k ip υυ最后得到 )()(m ij m u P =即 τ),,,()()(2)(1)(m ni m i m i m i u u u u =为对应于特征值i 的特征矢量的近似值.[求对称三对角矩阵特征值的方法]1° 相似变换法 设A 为n 阶对称三对角矩阵:A =⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡--n n n d e e d e e d e e d 113222111(1)经过相似变换1211211)(U U U I t A U U U A n k k n k --+-=τττ式中I 为单位矩阵,t k 为适当选定的常数,U i 为雅可比旋转矩阵:)1()(1111)1()(+⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-=+i i c s s c U i i ii i iiτi U 为U i 的转置矩阵.又A 1=A ,A k +1与k k t A -I 相似,且A m 与∑-=-111m j j I t A 相似.因此,若A m 的特征值为),,2,1()(n i m i =λ,则A 1的特征值i (i=1,2,...,n )为∑-=+=11)(m j j m ii t λλ(i =1,2,…,n )假定当),,2,1()(n i e m i =<ε时,可认为0)(≈m i e ,那末可适当选择s i ,c i ,使得当m 充分大时,A m 在该精度下化为对角线矩阵;其特征值),,2,1()()(n i d m i m i =≈λ.)(m i d (i=1,2,...,n )可由下列递推公式算出:()())1,,2,1;1,2,,2,1(,)]([)(//g ])()[(0,,)(1)(1)1(1)(1)(1)1(1)(1)(1)1(1)()()(1)()()(1)1(1)(1)()()()()(1)()()(1)(1)()(1)(1(k)1)()(1(k)1212)(2)(1)(1)()(-=--=⎪⎩⎪⎨⎧===-++=--=====+==-=+++++++++++++++++++++m k n n i q s e q c d r s e t d s g c s h d g s t d c q r e s r q c q c h e c c q rs c t d q k k k k k k k i k i k i k k i k i k i k i k i k i k i k i k i k k i k i k i k i k i k i k i k i k i k i k i i k i k i i k ik i k i k nk n k k n k nt k 的选择对收敛速度影响较大,取t k 为二阶矩阵⎥⎦⎤⎢⎣⎡)(2)(1)(1)(1k k k k d e e d 的接近于)(1k d 的那个特征值,即t k =⎪⎩⎪⎨⎧≥ββ++β-<ββ+-β-)0()1/()0()1/(2)(1)(12)(1)(1k k k k e d e d式中 )(1)(1)(22k k k e d d -=β 2° 二分法 设A 为n 阶对称三对角矩阵(如(1)式),对任意,设序列q 1()=d 1-q i ()=),,2()()(121n i q e d i i i =----λλ中q i ()<0的个数为N ()(在这些关系式中,对于某些i ,如果q i -1()=0,则只需用适当小的数代替即可),则N ()等于矩阵A 的小于的特征值的个数.假定矩阵A 的第k 个特征值k (1≤2≤… ≤k ≤…≤n )在区间[u ,υ]中,令21υ+=u r ,当N (r 1)≥k 时,则k ∈[u , r 1];当N (r 1)<k 时,则k ∈[ r 1,v ];…依此类推,m步之后,k 包含在宽度为mu2-υ的区间中.m 充分大时,便可得到所求的特征值.八、 矩阵多项式与最小多项式[矩阵多项式] 设i a (i=1,2,...,n )为某一数域(实数域或复数域)中的数,A 为这个数域上的n 阶方阵,则表示式f (A )=a 0I+a 1A+...+a n A n称为矩阵A 的多项式,式中I 为n 阶单位矩阵.如果矩阵A 使得f (A )=O那末称A为多项式f(λ)=a0λ+ a1λ+ ...+a nλn的根.[哈密顿-凯莱定理] 任一方阵都是它的特征多项式的根.[最小多项式及其性质] 以矩阵A为根的非零多项式f(λ)中,存在首项系数为1次数最低的多项式(λ),它就称为矩阵A的最小多项式.最小多项式具有性质:1°任一方阵仅有一个最小多项式;2°任一以A为根的多项式f(λ)都可被A的最小多项式(λ)所整除.特别,任一方阵的最小多项式可整除其特征多项式;3°方阵A的特征多项式的根都是A的最小多项式的根:4°相似矩阵具有相同的特征多项式和最小多项式.。

矩阵运算律偏导数矩阵运算律在微积分中有着重要的应用,特别是在偏导数的计算中。
偏导数是多元函数在某一点上关于某个变量的导数,它在矩阵运算中也有着特殊的性质和规律。
首先,我们来看矩阵的加法和数乘运算。
设A和B是同型矩阵,即具有相同的行数和列数。
那么对于任意实数k,有以下运算律成立:1. A + B = B + A.这是矩阵加法的交换律,即矩阵的加法满足交换律。
2. (A + B) + C = A + (B + C)。
这是矩阵加法的结合律,即矩阵的加法满足结合律。
3. k(A + B) = kA + kB.这是矩阵数乘的分配律,即数与矩阵相乘的运算满足分配律。
接下来,我们来看矩阵的乘法运算。
设A是m×n矩阵,B是n×p矩阵,那么有以下运算律成立:1. A(BC) = (AB)C.这是矩阵乘法的结合律,即矩阵的乘法满足结合律。
2. A(B + C) = AB + AC.这是矩阵乘法对矩阵加法的分配律,即矩阵乘法对矩阵加法满足分配律。
在微积分中,我们经常需要对多元函数进行偏导数的计算。
偏导数的计算也可以利用矩阵运算律来简化和优化。
设函数f(x)是一个n元函数,即f:R^n→R,那么f的偏导数可以表示为一个n维列向量,记作∇f(x)。
对于任意实数k和n元函数f(x),有以下运算律成立:1. ∇(kf) = k∇f.这是偏导数与数乘的运算律,即偏导数与数乘运算满足数乘的运算律。
2. ∇(f + g) = ∇f + ∇g.这是偏导数与函数加法的运算律,即偏导数与函数加法满足加法的运算律。
通过矩阵运算律和偏导数的运算律,我们可以更加方便地进行多元函数的偏导数计算,简化运算步骤,提高计算效率。
这些运算律的理解和应用对于理解微积分和矩阵运算有着重要的意义,也为实际问题的求解提供了有力的数学工具。

矩阵分析主讲教师:张艳霞矩阵理论的应用微分方程、概率与统计、优化、信号处理、控制工程、经济理论等等。
工程经济理论等等如需更深入地学习和了解在自己专业的应用,可如需更深入地学习和了解在自己专业的应用可参考:《矩阵分析与应用》,张贤达著,清华大学出版社;《Matrix Analysis for Scientists & Engineers》:Alan J. Laub,SIAM.第章第一章线性空间和线性变换线性空间的基本概念及其性质线性空间的基底,维数, 坐标变换线性空间的基底维数线性空间的子空间,交与和线性映射及其值域、核线性变换及其矩阵表示矩阵(线性变换)的特征值与特征向量矩阵的可对角化条件第一节第节线性空间一:线性空间的定义与例子线性间的义定义设是一个非空的集合,是一个数域,V F 在集合中定义两种代数运算,一种是加法运算,来表示另种是运算用来表示V 用来表示; 另一种是数乘运算, 用来表示, +i并且这两种运算满足下列八条运算律:(1)加法交换律αββα+=+(2)加法结合律()()αβγαβγ++=++(3)零元素: 在中存在一个元素,使得对于V 0任意的都有V α∈0αα+=(4)负元素: 对于中的任意元素都存在一V α个元素使得β0αβ+=(5)i =1αα(6)()()k l kl αα=(7)()k l k l ααα+=+(8)()k k k αβαβ+=+为数域F 称这样的上的线性空间。
V例1全体实函数集合构成实数域上的线性空间。
R 例2复数域上的全体型矩阵构成的集C m n ×合为上的线性空间。
m n × C C 例3实数域上全体次数小于或等于的多项式R n 集合构成实数域上的线性空间;1[]n R x +R 实数域上全体次数等于的多项式集合不构成实数域上的线性空间;R n R二:线性空间的基本概念及其性质定义:线性组合;线性表出;线性相关;线性无关;向量组的极大线性无关组;向量组的秩向量组的极大线性无关组向量组的秩R例1实数域上的函数空间中,函数组2x x1,cos,cos2是线性相关的函数组。
矩阵的变换与运算矩阵的乘法与逆矩阵矩阵的变换与运算:矩阵的乘法与逆矩阵矩阵在数学中扮演着重要的角色,它可以用于描述线性变换或者表示线性系统的方程组。
本文将讨论矩阵的变换与运算,重点介绍矩阵的乘法与逆矩阵两个关键概念。
一、矩阵的乘法(Matrix Multiplication)矩阵的乘法是矩阵运算中的一种基本运算,表示为A * B,其中A 和B分别为两个矩阵。
在进行矩阵乘法时,需要满足乘法的条件:A 矩阵的列数等于B矩阵的行数。
矩阵乘法的计算方法是将A矩阵的每一行与B矩阵的每一列进行内积运算,并将结果填入一个新的矩阵C中。
具体计算过程如下:C[i][j] = A[i][1]*B[1][j] + A[i][2]*B[2][j] + ... + A[i][n]*B[n][j]其中,C[i][j]表示矩阵C中第i行第j列的元素,A[i][k]表示矩阵A 中第i行第k列的元素,B[k][j]表示矩阵B中第k行第j列的元素。
矩阵乘法的重要性在于可以描述线性变换的复合效果,同时也有利于解决线性方程组。
在实际应用中,矩阵乘法广泛运用于计算机图形学、信号处理、最优化等领域。
二、逆矩阵(Inverse Matrix)逆矩阵是指对于一个可逆矩阵A,存在一个矩阵B,使得A * B = B * A = I,其中I为单位矩阵。
逆矩阵的存在与否与矩阵的行列式密切相关。
判断矩阵A是否可逆的条件是行列式不等于零,即|A| ≠ 0。
若矩阵A可逆,则可以通过一系列行变换将其转化为单位矩阵,对应的变换矩阵为逆矩阵。
逆矩阵的计算可以使用伴随矩阵法或者初等行变换法。
例如,对于一个2x2的矩阵A:A = [a b][c d]若|A| ≠ 0,即ad - bc ≠ 0,则A的逆矩阵存在,并可表示为:A^-1 = 1/(ad - bc) * [d -b][-c a]逆矩阵的应用广泛,例如求解线性方程组、计算矩阵的行列式与秩、求解微分方程等。
三、矩阵的变换(Matrix Transformation)矩阵的变换是指通过矩阵的乘法,对向量进行线性变换。
摘要在常微分方程中,介绍了解常系数线性微分方程组的消元法,它是解常系数线性微分方程组的最初等的方法,适用于知函数较少的小型微分方程组。
对于未知函数较多时,用消元法则会非常不便,为此应寻求更为有效的方法。
在掌握线性代数的知识后,用矩阵法解常系数线性齐次微分方程组较为方便。
关键词:基解矩阵特征方程特征值特征向量AbstractIn the ordinary differential equation, introduced that understood often the coefficient linear simultaneous differential equation's elimination, it is the solution often the coefficient linear simultaneous differential equation's most primary method, is suitable in knows the function few small simultaneous differential equation. Are many when regarding the unknown function, will be inconvenient with the elimination, for this reason should seek a more effective method. After grasping the linear algebra the knowledge, the coefficient linearity homogeneous simultaneous differential equation is often more convenient with the matrix technique solution.Keywords: basic solution of matrix characteristic equation eigenvalue Characteristic vector第一章:矩阵指数A引言已知常系数线性微分方程组:⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧+++=+++=+++=n nn n n n nn n n xa x a x a dtdx x a x a x a dtdx x a x a x a dt dx (22112222121212121111)(1) 的求解方法,通常可以用消元法将方程组化为一元的高阶微分方程:0 (111)111=+++--x b dtx d b dt x d n n n nn 来求解。
线阵卫星遥感影像外方位元素对偶四元数求解法余岸竹;姜挺;龚辉;郭文月;江刚武【摘要】基于对偶四元数可统一描述位置与姿态的特点,提出了利用对偶四元数求解线阵卫星遥感影像外方位元素的方法.该方法使用对偶四元数的实部描述传感器的姿态,并利用对偶部和实部共同描述成像传感器的位置.通过对位置和姿态的内插建立了基于对偶四元数的外方位元素模型.为减少运算,将球面线性插值进行化简,进而建立了基于线性插值的成像几何模型.为求解外方位元素,首先对共线条件方程进行了线性化,然后通过矩阵微分运算推导了线元素的虚拟观测方程,并根据误差传播定律确定其权值,最终采用具有约束条件的参数平差法求解外方位元素.试验结果表明本文方法正确可靠,与采用欧拉角和单位四元数的外方位元素求解方法相比,有更高的参数解算精度,同时也表明了准确的初值和虚拟观测方程对外方位元素求解的必要性.%According to the characteristics that dual quaternion can describe the position and orientation simultaneously,a method using dual quaternion to calculate the exterior orientation parameters for satellite linear array images is proposed.In this method the real part of dual quaternion is used to represent attitude of the sensor,and both the real part and the dual part are used to represent the position of the sensor.The model describing exterior parameters is established by interpolating the position and attitude. To reduce calculation,the simplified spherical linear interpolation algorithm is proposed,and the geometric model is established.In order to calculate the exterior parameters,the collinear equation is linearized at first.Then the virtual observation equations for position parameters are deduced according to the theory of matrixderivative,and the weight of the equation is calculated using error propagation principle.The exterior orientation parameters are calculated iteratively using parameter adjustment with constraints atlast.Experimental results indicate that the proposed method is reliable and correct,and the precision of parameter estimation is higher than traditional methods using Euler angles or unit quaternion. The necessity of accuracy initial values and virtual observation equations for calculating exterior parameters is also revealed.【期刊名称】《测绘学报》【年(卷),期】2016(045)002【总页数】9页(P186-193,198)【关键词】对偶四元数;线阵遥感影像;虚拟观测方程;外方位元素;单位四元数【作者】余岸竹;姜挺;龚辉;郭文月;江刚武【作者单位】信息工程大学地理空间信息学院,河南郑州 450052;信息工程大学地理空间信息学院,河南郑州 450052;西安测绘研究所,陕西西安 710054;信息工程大学地理空间信息学院,河南郑州 450052;信息工程大学地理空间信息学院,河南郑州 450052【正文语种】中文【中图分类】P236空间后方交会是卫星摄影测量几何处理中的重要环节,是卫星遥感影像几何定位、区域网平差和自检校光束法平差等计算的关键步骤,其基本思想是利用合适的外方位元素模型描述成像传感器的位置与姿态,建立线阵影像的成像几何模型,对共线条件方程进行线性化后迭代求解外方位元素。
微积分学(Calculus,拉丁语意为用来计数的小石头)是研究极限、微分学、积分学和无穷级数等的一个数学分支,并成为了现代大学教育的重要组成部分。
微积分学基本定理指出,微分和积分互为逆运算,这也是两种理论被统一成微积分学的原因。
我们可以以两者中任意一者为起点来讨论微积分学,但是在教学中一般会先引入微分学。
在更深的数学领域中,高等微积分学通常被称为分析学,并被定义为研究函数的科学,是现代数学的主要分支之一。
早在古代,人们就会积分思想,如阿基米德用积分法算出了球的表面积,中国古代数学家刘微运用割元法求出圆周率3.1416,这也是用正多边形逼近圆,任何求出近似圆周率。
割圆法也是积分思想。
我们最伟大的古代数学家(现在是华罗庚)祖冲之也是利用积分算出了圆周率后7位数。
和球的体积。
但是正正系统提出微积分的是牛顿和莱布尼茨,他们为谁先发明微积分挣得头破血流。
牛顿是三大数学家之一,也是第一位划时代的物理学家,晚年从事神学和炼金学,它创立了整个经典力学体系和几何光学,这几乎成为了整个中学的必修部分,初中的力学和光学默认为几何光学,力学默认为简单的经典力学。
高中开始正式学习经典力学。
这里有一个非常之大的错误就是初中里为了方便或简单,用平均速率来代替平均速度,也就是速度公式v=x/t在初中里用速率公式v=s/t代替。
速度和速率一个是矢量,一个是标量,这里差距巨大,不知道编写初中课本(人教版是这样)的编者是学历太低,还是别有用心?这里我们讲微积分,之所以提起这个事情,就是为了突出一个名词——平均速度。
牛顿发明微积分(暂且认为是他和莱布尼茨共同发明的)的目的是为了研究物理学,因为微积分能解决很多普通数学不能解决的物体,如求曲边梯形面积。
实际上,我们初中是速度公式是速率公式,即v=s/t高中的速度公式实际上是平均速度公式,即v=△x/△t这里的△念德耳塔,表示变化率,这里当然不是用△去乘x了,△x是一个整体,就像汉字一样。

习 题 七A 组1.填空题(1)向量组(1,1,0,1),(1,2,3,0),(2,3,3,1)--生成的向量空间的维数是 . 解 2.(2)设全体三阶上三角形矩阵构成的线性空间为V ,则它的维数是 . 解 6.(3)次数不超过2的多项式的全体构成线性空间[]2P x ,其中的元素2()1f x x x =++在基1,1,(1)(2)x x x ---下的坐标是 .解 T (3,4,1).(4)设1231010,1,1110⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪=== ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭ααα是向量空间3V 的一个基,则向量111⎛⎫ ⎪= ⎪ ⎪⎝⎭α在该基下的坐标是 .解 T111,,222⎛⎫⎪⎝⎭.(5)二维向量空间2R 中从基1211,01⎛⎫⎛⎫== ⎪ ⎪-⎝⎭⎝⎭αα到另一个基1211,12⎛⎫⎛⎫== ⎪ ⎪⎝⎭⎝⎭ββ的过渡矩阵是 .解 2312⎛⎫⎪--⎝⎭.(6)三维向量空间中的线性变换(,,)(,,)T x y z x y x y z =+-在标准基1(1,0,0)=e ,2(0,1,0)=e ,3(0,0,1)=e 下对应的矩阵是 .解 110110001⎛⎫ ⎪- ⎪ ⎪⎝⎭.2. 选择题(1)下列说法中正确的是 . (A )任何线性空间中一定含有零向量;(B )由r 个向量生成的子空间一定是r 维的;(C )次数为n 的全体多项式对于多项式的加法和数乘构成线性空间;(D )在n 维向量空间V 中,所有分量等于1的全体向量的集合构成V 的子空间. (2)下列说法中错误的是 .(A )若向量空间V 中任何向量都可以由向量组12,,,n ααα线性表示,则12,,,n ααα是V 的一个基;(B )若n 维向量空间V 中任何向量都可以由向量组12,,,n ααα线性表示,则12,,,n ααα是V 的一个基;(C )若1n -维向量空间V 中任何向量都可以由向量组12,,,n ααα线性表示,则12,,,n ααα不是V 的一个基;(D )n 维向量空间V 的任一个基必定含有n 个向量.(3) 下列3维向量的集合中, 是3R 的子空间. (A ){}123123123(,,)0;,,x x x x x x x x x ⋅⋅≤∈R ; (B ){}222123123123(,,)1;,,x x x x x x x x x ++=∈R ; (C ){}123123123(,,);,,x x x x x x x x x ==∈R ; (D ){}123123123(,,);,,x x x x x x x x x ≥≥∈R . (4)在2V 中,下列向量集合构成子空间的是 . (A )(0,0),(0,1),(1,0)组成的集合; (B )(0,0)组成的集合;(C )所有形如(,1)x 的向量组成的集合; (D )满足1x y +=的所有(,)x y 组成的集合. (5)2V 的下列变换 不是线性变换. (A )(,)(0,0)T x y =;(B )(,)(,)T x y ax by cx dy =++,,,,a b c d 是实数; (C )(,)(,1)T x y x y =+; (D )(,)(0,)T x y x y =-.解 (1)A ; (2)A ; (3)C ; (4)B ;(5)C . 3.验证:(1)主对角线上元素之和等于0的2阶矩阵的全体1S ;(2)2阶对称矩阵的全体2S ,对于矩阵的加法和乘数运算构成线性空间,并写出每个空间的一个基.解 (1)任取11,S S ∈∈A B ,,ac be d af b ⎛⎫⎛⎫== ⎪ ⎪--⎝⎭⎝⎭A B ,其中,,,,,a b c d e f 表示任意实数,则对于任意的,k λ∈R ,有线性运算的封闭性成立:1ka bkc e k S kd fka b λλλλλ++⎛⎫+=∈⎪+--⎝⎭A B .1S 的一个基是100100,,010010⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪-⎝⎭⎝⎭⎝⎭. (2)任取22,S S ∈∈A B ,对于任意的,k λ∈R ,都满足运算成立:T T T 2()k k k S λλλ+=+=+∈A B A B A B .2S 的一个基是100001,,000110⎛⎫⎛⎫⎛⎫⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭.4.验证:与向量T (0,1,0)不平行的全体3维数组向量,对于数组向量的加法和乘数运算不构成线性空间.证明 与向量T (0,1,0)不平行的全体3维数组向量的集合记作V ,T T (1,1,1),(1,0,1)V ==∈αβ,但T(0,1,0)V -=∉αβ,所以V 不是线性空间.5.设U 是线性空间V 的一个子空间,证明:若U 与V 的维数相等,则U =V . 证明 设12,,,r ααα是U 的一个基,因为U V ⊆,所以12,,,r V ∈ααα.对于任意的V ∈α,必定可被12,,,r ααα线性表示,否则与“U 与V 的维数相等”矛盾.由α的任意性知V U ⊆,从而U =V .6. 判断22⨯R的下列子集是否构成子空间,说明理由.(1) 110,,0a W a b c b c ⎧⎫⎛⎫⎪⎪=∈⎨⎬ ⎪⎝⎭⎪⎪⎩⎭R ; (2) 100,,,00a b W a b c a b c c ⎧⎫⎛⎫⎪⎪=++=∈⎨⎬ ⎪⎝⎭⎪⎪⎩⎭R . 解 (1)不构成.由于1100000W ⎛⎫==∈ ⎪⎝⎭A B 但 1200000W ⎛⎫+=∉ ⎪⎝⎭A B ,即1W 对矩阵加法不封闭.(2) 构成.任取1122221200,0000a b a b W W c c ⎛⎫⎛⎫=∈=∈ ⎪⎪⎝⎭⎝⎭A B , 有1112220,0a b c a b c ++=++=,121212000a a b bc c ++⎛⎫+= ⎪+⎝⎭A B . 于是1212120a a b b c c +++++=,1212212000a a b bW c c ++⎛⎫+=∈ ⎪+⎝⎭A B . 对任意k ∈R ,111000ka kb k kc ⎛⎫= ⎪⎝⎭A ,1110ka kb kc ++=,所以2k W ∈A .2W 对矩阵加法和数乘运算封闭,所以2W 构成子空间.7. 判断22⨯R的下列子集是否构成子空间,说明理由.(1)由所有行列式为零的矩阵所组成的集合1W ; (2)由所有满足2=A A 的矩阵组成的集合2W . 解 (1) 不构成.取10,00⎛⎫=⎪⎝⎭A 0001⎛⎫= ⎪⎝⎭B ,1,W ∈A B ,但是10,1,01⎛⎫+=+= ⎪⎝⎭A B A B 因此1W +∉A B ,加法不封闭.(2) 不构成.取单位矩阵1001⎛⎫= ⎪⎝⎭E ,2=E E ,2W ∈E ,但2(2)42=≠E E E ,所以22W ∉E ,数乘不封闭.8. 在3R 中求向量T (2,7,6)=-α在基T T T123(2,0,1),(1,3,2),(2,1,1)=-==-ααα下的坐标. 解 设所求坐标为T123(,,)x x x ,则1232312322270362x x x x x x x x --⎛⎫⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪=++ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪-⎝⎭⎝⎭⎝⎭⎝⎭, 解得T T 123(,,)(1,2,1)x x x =-. 9.3R 中两个基为T T T 123(1,1,1),(1,0,1),(1,0,1)==-=ααα;T T T 123(1,2,1),(2,3,4),(3,4,5)===βββ,求由基123,,ααα到基123,,βββ的过渡矩阵. 解 设123123(,,)(,,)=P βββααα,则1123123(,,)(,,)-=P αααβββ1111123234100234011111145100-⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪==-- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪--⎝⎭⎝⎭⎝⎭.10.在3R 中,取两个基T T T 123(1,0,0),(0,1,0),(0,0,1)===e e e ;T T T 123(1,0,0),(1,1,0),(1,1,1)===ααα,(1)求由基123,,e e e 到基123,,ααα的过渡矩阵;(2)已知由基123,,ααα到基123,,βββ的过渡矩阵为110011001-⎛⎫⎪=- ⎪ ⎪⎝⎭A ,求123,,βββ; (3)已知α在基123,,βββ下的坐标为T (1,2,3),求α在基123,,ααα下的坐标.解 (1)因为123123111(,,)(,,)011001⎛⎫⎪= ⎪ ⎪⎝⎭e e e ααα,所以基123,,e e e 到基123,,ααα的过渡矩阵为111011001⎛⎫⎪= ⎪ ⎪⎝⎭P .(2)由于123123*********(,,)(,,)011011010001001001-⎛⎫⎛⎫⎛⎫ ⎪⎪ ⎪==-= ⎪⎪ ⎪ ⎪⎪ ⎪⎝⎭⎝⎭⎝⎭A βββααα,故 T T T 123(1,0,0),(0,1,0),(0,0,1)===βββ.(3)设α在基123,,ααα下的坐标为T 123(,,)x x x ,则有112323(,,)x x x ⎛⎫⎪= ⎪ ⎪⎝⎭αααα,又12312311(,,)2(,,)233⎛⎫⎛⎫ ⎪ ⎪== ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭A αβββααα,从而123111011201121300133x x x --⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫⎪ ⎪ ⎪⎪ ⎪==-=- ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭A . 11.在3R 中取两个基T T 11T T 22T T33T T 44(1,0,0,0),(2,1,1,1),(0,1,0,0),(0,3,1,0),(0,0,1,0),(5,3,2,1),(0,0,0,1),(6,6,1,3).⎧⎧==-⎪⎪==⎪⎪⎨⎨==⎪⎪⎪⎪==⎩⎩e e e e αααα (1)求前一个基到后一个基的过渡矩阵;(2)求向量T 1234(,,,)x x x x 在后一个基下的坐标; (3)求在两个基下有相同坐标的向量.解 (1) 因为123412342561336(,,,)(,,,)11211013⎛⎫ ⎪⎪= ⎪- ⎪⎝⎭e e e e αααα,所以前一个基到后一个基的过渡矩阵为2056133611211013⎛⎫ ⎪⎪= ⎪- ⎪ ⎪⎝⎭A . (2) 设向量T 1234(,,,)x x x x 在后一个基下的坐标为T1234(,,,)y y y y ,则1112221234333444(,,,)x y y x y y x y y x y y ⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪== ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭A αααα,所以,11112221333444256133611211013y x x y x x y x x y x x --⎛⎫⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪== ⎪ ⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭A 123412927331129231900182773926x x x x --⎛⎫⎛⎫ ⎪ ⎪-- ⎪⎪= ⎪⎪- ⎪ ⎪ ⎪⎪--⎝⎭⎝⎭. (3) 设向量T 1234(,,,)x x x x =α在两个基下有相同的坐标,则112212343344(,,,)x x x x x x x x ⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪== ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭e e e e E α,112212343344(,,,)x x x xx x x x ⎛⎫⎛⎫⎪ ⎪ ⎪ ⎪== ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭A ααααα,所以 1234()x x x x ⎛⎫⎪ ⎪-= ⎪ ⎪ ⎪⎝⎭A E 0,解得T (1,1,1,1),k k =-∈R α. 12.说明xOy 平面上变换x x T y y ⎛⎫⎛⎫= ⎪ ⎪⎝⎭⎝⎭A 的几何意义,其中(1) 1001-⎛⎫=⎪⎝⎭A ; (2) 0001⎛⎫= ⎪⎝⎭A ;(3) 0110⎛⎫=⎪⎝⎭A ; (4) 0110⎛⎫= ⎪-⎝⎭A .解 (1)1001x x x x T y y y y --⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫=== ⎪ ⎪⎪⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭A ,关于y 轴对称;(2)00001x x x T y y y y ⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫=== ⎪ ⎪⎪⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭A ,投影到y 轴;(3)0110x x x y T y y y x ⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫=== ⎪ ⎪ ⎪⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭A ,关于直线y x =对称;(4)0110x x x y T y y y x ⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫=== ⎪ ⎪ ⎪⎪ ⎪--⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭A ,顺时针旋转90.13.n 阶对称矩阵的全体V 对于矩阵的线性运算构成一个(1)2n n +维线性空间.给定n 阶矩阵P ,以A 表示V 中的任一元素,变换T ()T =A P AP称为合同变换.证明合同变换T 是V 中的线性变换.证明 设,V ∈A B ,k ∈R ,则T T ,==A A B B ,所以T ()+=+A B A B ,T ()k k =A A .从而+A B 与k A 是对称矩阵.又因为T T T ()()()()T T T +=+=+=+A B P A B P P AP P BP A B ,T T ()()()T k k k kT ===A P A P P AP A ,所以T 是V 中的线性变换.14.设3R 中123,,ααα是一个基,且线性变换T 在此基下的矩阵为460350361⎛⎫⎪=-- ⎪ ⎪--⎝⎭A ,(1)证明123312,,2-++-+αααααα也是3R 的一个基; (2)求线性变换T 在此基下的矩阵.证明 (1)令112323312,,2=-++==-+βαααβαβαα,可解得1123,=--αβββ 212322=--αβββ, 32=αβ,这说明了123,,ααα和123,,βββ可以相互线性表示,从而它们等价,所以123,,βββ是3R 的一个基.(2)设线性变换T 在基123,,βββ下的矩阵是B ,并设从基123,,ααα到基123,,βββ的过渡矩阵是P ,则1-=B P AP ,由条件知102101110--⎛⎫ ⎪= ⎪ ⎪⎝⎭P ,得1120121110-⎛⎫⎪=-- ⎪ ⎪--⎝⎭P ,从而 1200010001--⎛⎫⎪== ⎪ ⎪⎝⎭B P AP .15.函数集合{}23210210(),,xV a x a x a e a a a ==++∈R α对于函数的线性运算构成三维线性空间.在3V 中取一个基2123,,x x x x e xe e ===ααα,求微分运算D 在这个基下的矩阵. 解 因为21123()220x x D x e xe =+=++αααα, 2123()0x x D e xe =+=++αααα,3123()00x D e ==++αααα,所以微分运算D 在这个基下的矩阵为100210011⎛⎫ ⎪⎪ ⎪⎝⎭.16.二阶对称矩阵的全体12312323,,x x V x x x x x ⎧⎫⎛⎫⎪⎪==∈⎨⎬⎪⎝⎭⎪⎪⎩⎭R A 对于矩阵的线性运算构成三维线性空间.在3V 中取一个基123100100,,001001⎛⎫⎛⎫⎛⎫===⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭A A A ,在3V 中定义合同变换1011()1101T ⎛⎫⎛⎫= ⎪ ⎪⎝⎭⎝⎭A A ,求T 在基123,,A A A 下的矩阵.解 因为11123101110101111()110111000111T ⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫====++ ⎪ ⎪ ⎪⎪⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭A A A A A ,2223101110011101()2110111100112T ⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫====+ ⎪ ⎪ ⎪⎪⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭A A A A ,333101110001100()110111010101T ⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫==== ⎪ ⎪ ⎪⎪⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭A A A ,123123100((),(),())(,,)110121T T T ⎛⎫ ⎪= ⎪ ⎪⎝⎭A A A A A A ,所以T 在基123,,A A A 下的矩阵为100110121⎛⎫⎪⎪ ⎪⎝⎭.17.设A 是一个正定矩阵,向量1212(,,,),(,,,)n n x x x y y y ==αβ.在nR 中定义内积 [],αβ为[]T ,=A αβαβ.证明在这个定义之下,n R 是一个Euclid 空间.证明 按定义证明满足以下四条性质即可. (1)对称性 [][]T T T T T T ,(),=====A A A A αβαβαββαβαβα.(2)线性加性 [][][]TT T ,(),,+=+=+=+A A A αβγαβγαγβγαγβγ.(3)线性齐性 [][]T T ,()(),k k k k ===A A αβαβαβαβ.(4)非负性 由于A 是正定矩阵,所以[]T ,=A αααα是个正定二次型,从而[],0≥αα,当且仅当=0α时[],0=αα.18.设V 是一个n 维Euclid 空间,≠0α是V 中一固定向量,证明:[]{}1,0,V V ==∈x x αx 是V的一个子空间.证明 因为1V ∈0,所以1V 非空.再证1V 对两种运算封闭.任给121,V ∈x x ,即[][]12,0,,0==x αx α,根据V 的线性加性有[][][]1212,,,+=+=x x αx αx α000+=,从而可知121V +∈x x .另一方面,由[][]11,,0k k ==x αx α可知,11k V ∈x .此即证得[]{}1,0,V V ==∈x x αx 是V 的一个子空间.B 组1.求二阶矩阵构成的线性空间22⨯R中元素0123⎛⎫= ⎪-⎝⎭A 在基10111⎛⎫= ⎪⎝⎭G ,21011⎛⎫= ⎪⎝⎭G ,31101⎛⎫= ⎪⎝⎭G ,41110⎛⎫= ⎪⎝⎭G 下的坐标.解 设11223344k k k k =+++A G G G G ,则234134124123 0,1, 2, 3,k k k k k k k k k k k k ++=⎧⎪++=⎪⎨++=⎪⎪++=-⎩ 解得12340,1,2,3k k k k ==-=-=,所求坐标为T (0,1,2,3)--. 2.在二阶矩阵构成的线性空间22⨯R 中,(1)求基123410010000,,,00001001⎛⎫⎛⎫⎛⎫⎛⎫==== ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭E E E E到基123421035366,,,11102113⎛⎫⎛⎫⎛⎫⎛⎫==== ⎪ ⎪ ⎪ ⎪-⎝⎭⎝⎭⎝⎭⎝⎭F F F F的过渡矩阵;(2)分别求向量11122122a a a a ⎛⎫=⎪⎝⎭M 在基1234,,,E E E E 和基1234,,,F F F F 下的坐标; (3)求一个非零向量A ,使得A 在这两个基下的坐标相等. 解 (1)因为112342=+-+F E E E E , 21234030=+++F E E E E , 31234532=+++F E E E E , 41234663=+++F E E E E ,即1234123420561336(,,,)(,,,)11211013⎛⎫ ⎪⎪= ⎪- ⎪ ⎪⎝⎭F F F F E E E E , 所以,基1234,,,E E E E 到基1234,,,F F F F 的过渡矩阵为2056133611211013⎛⎫ ⎪⎪= ⎪- ⎪ ⎪⎝⎭P . (2)显然11121111222132242122a a a a a a a a ⎛⎫==+++⎪⎝⎭M E E E E ,得到M 在基1234,,,E E E E 下的坐标为T 11122122(,,,)a a a a .设M 在基1234,,,F F F F 下的坐标为T 1234(,,,)y y y y ,则111212342122(,,,)a a a a ⎛⎫ ⎪ ⎪= ⎪ ⎪ ⎪⎝⎭M E E E E 1122123412343344(,,,)(,,,)y y y y y y y y ⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪== ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭F F F F E E E E P , 得111112121213212142222411119391412327932712003371126279327y a a y a a y a a y a a -⎛⎫-- ⎪ ⎪⎛⎫⎛⎫⎛⎫⎪-- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪== ⎪ ⎪ ⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭ ⎪ ⎪-- ⎪⎝⎭P 1112212211122122112211122122411193914123279327123371126279327a a a a a a a a a a a a a a ⎛⎫+-- ⎪ ⎪ ⎪+-- ⎪= ⎪ ⎪- ⎪ ⎪ ⎪--++ ⎪⎝⎭.(3)解方程111221221111122122122111222211122122411193914123279327123371126279327a a a a a a a a a a a a a a a a a a ⎛⎫+-- ⎪ ⎪⎛⎫⎪+-- ⎪ ⎪ ⎪= ⎪ ⎪ ⎪- ⎪ ⎪ ⎪⎝⎭⎪ ⎪--++ ⎪⎝⎭,得11122122a a a a ===-,所以11,011k k ⎛⎫=≠ ⎪-⎝⎭A .3. 设T 是四维线性空间V 的线性变换,T 在V 的基1234,,,αααα下的矩阵为1222265200120026----⎛⎫ ⎪⎪= ⎪-- ⎪ ⎪⎝⎭A 求T 在V 的基11212323434,,,==-+=-+=-+βαβααβααβαα下的矩阵.解 12341234(,,,)(,,,)=P ββββαααα,其中1100011000110001-⎛⎫ ⎪-⎪= ⎪- ⎪ ⎪⎝⎭P , 所求矩阵11300240000130024-⎛⎫ ⎪ ⎪== ⎪ ⎪ ⎪⎝⎭B P AP . 4. 设12,,,n ααα是n R 的一个基.(1) 证明11212312,,,,n ++++++ααααααααα也是n R 的一个基;(2) 求由基12,,,n ααα到基11212312,,,,n ++++++ααααααααα的过渡矩阵;(3) 求向量α在基12,,,n ααα下的坐标T 12(,,,)n x x x 和在基1α,12+αα,123++ααα,,12n +++ααα下的坐标T 12(,,,)n y y y 间的变换公式.解 (1) 因为()()1121231212111011,,,,,,,001n n ⎛⎫⎪⎪++++++= ⎪⎪⎝⎭αααααααααααα,所以111011001⎛⎫⎪⎪= ⎪ ⎪ ⎪⎝⎭P ,10=≠P ,P 可逆,从而向量组1α,12+αα,123++ααα,,12n +++ααα与向量组12,,,n ααα等价,而12,,,n ααα是n R 的一个基,所以1α,12+αα,123++ααα,,12n +++ααα也是n R 的一个基.(2) 由基12,,,n ααα到基1α,12+αα,123++ααα,,12n +++ααα的过渡矩阵为111011001⎛⎫⎪⎪= ⎪ ⎪ ⎪⎝⎭P . (3) 坐标变换公式为11111222211100000110001110010001100011000100001100001n n n n y x x x y x x x y x x x ---⎛⎫⎪- ⎪⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪===⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪⎪⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭- ⎪ ⎪⎝⎭P . 5. 设12,,,n ααα是V 的一个基,且()()1212,,,,,,n n =A βββααα,证明12,,,n βββ是V的一个基的充分必要条件是矩阵A 为可逆矩阵.证明 由于12,,,n ααα线性无关,注意到()()112211221212,,,,,,n n n n n n k k kkk k k k k ⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪+++== ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭A ββββββααα,可得12,,,n βββ是V 的一个基⇔12,,,n βββ线性无关⇔1122n n k k k +++=0βββ时,必定有120n k k k ====⇔()1212,,,0n n k kk ⎛⎫ ⎪ ⎪= ⎪ ⎪⎝⎭A ααα时,必定有120n k k k ====⇔12n k k k ⎛⎫ ⎪ ⎪= ⎪ ⎪ ⎪⎝⎭A 0时,必定有120n k k k ====⇔齐次线性方程组=Ax 0只有零解 ⇔0≠A ⇔A 是可逆矩阵.6. 设12,V V 是线性空间V 的两个不同的子空间,且1V V ≠,2V V ≠,证明在V 中存在向量α,使得12,V V ∉∉αα同时成立.证明 由于1V V ≠,2V V ≠,于是在V 中存在向量,αβ,使得12,V V ∉∉αβ成立. 若2V ∉α,则α即为所求. 若2V ∈α,则对任意数k ,有2k V +∉αβ.否则,由于2V ∈α和2k V +∈αβ,可得2()k k V +-=∈αβαβ,与假设矛盾.于是,取12k k ≠,则11k V +∈αβ与21k V +∈αβ不能同时成立,否则12121()()()k k k k V +-+=-∈αβαβα,有1V ∈α,矛盾.故11k V +∉αβ与21k V +∉αβ至少有一个成立,不妨设11k V +∉αβ,又12k V +∉αβ,因此1k +αβ即为所求. 7. 设12,,,n ααα与12,,,n βββ是n 维线性空间V 的两个基,证明(1)在两组基下坐标完全相同的全体向量的集合1V 是V 的子空间; (2)设基12,,,n ααα到基12,,,n βββ的过渡矩阵是P ,若()R r -=E P ,则1dim V n r =-;(3)若V 中的每个向量在这两个基下的坐标完全相同,则1122,,,n n ===αβαβαβ.证明 (1)设1,V ∈αβ,即11221122n n n n x x x x x x =+++=+++ααααβββ, 11221122n n n n y y y y y y =+++=+++βαααβββ.则111222111222()()()()()()n n n n n n x y x y x y x y x y x y +=++++++=++++++αβαααβββ,1122n n k kx kx kx =+++αααα1122n n kx kx kx =+++βββ,即+αβ,k α在这两个基下的坐标也完全相同,于是1V +∈αβ,1k V ∈α,从而1V 是V 的子空间.(2)设α是1V 中任一向量,则12112212(,,,)n n n n x xx x x x ⎛⎫ ⎪ ⎪=+++= ⎪ ⎪⎝⎭ααααααα,12112212(,,,)n n n n x xx x x x ⎛⎫ ⎪ ⎪=+++= ⎪ ⎪⎝⎭αββββββ1212(,,,)n n x xx ⎛⎫ ⎪ ⎪= ⎪ ⎪⎝⎭P ααα.于是,α在两个基下的坐标存在关系=x Px ,T 12(,,,)n x x x =x ,即()-=E P x 0.由于()R r -=E P ,故此齐次线性方程组的解向量的全体构成n r -维空间,从而α的全体即1V 的维数是n r -. (3)i α(1,2,,)i n =在基12,,,n ααα下的坐标为T (0,0,,0,1,0,,0)(第i 个分量为1,余皆为0),即11100100i i i i n -+=++++++αααααα, 1,2,,i n =.而由条件,i α(1,2,,)i n =在基12,,,n βββ下的坐标也是T (0,0,,0,1,0,,0),即11100100i i i i n -+=++++++αβββββ,1,2,,i n =,从而有i i =αβ,1,2,,i n =.。
《moore-penrose逆矩阵的微分》导读:在线性代数中,矩阵具有广泛的应用,而其中的逆矩阵更是一个重要的概念。
moore-penrose逆矩阵是一种特殊的逆矩阵,它在实际问题中有着重要的应用。
本文将围绕moore-penrose逆矩阵的微分展开讨论,希望通过对该主题的深度探究,让读者能够更深刻地理解这一概念。
一、moore-penrose逆矩阵概述moore-penrose逆矩阵,又称广义逆矩阵,是矩阵论中的一个重要概念。
对于任意一个矩阵A,其moore-penrose逆矩阵记作A⁺。
与普通逆矩阵不同,moore-penrose逆矩阵具有良好的性质,即使矩阵不是方阵,也存在moore-penrose逆矩阵。
二、moore-penrose逆矩阵的微分应用在实际问题中,我们经常需要对矩阵进行微分运算,而moore-penrose逆矩阵的微分在其中发挥着重要作用。
对于一个矩阵函数f(X),其中X是一个矩阵变量,我们希望求出f(X)对X的导数。
这就涉及到了对moore-penrose逆矩阵的微分运算。
具体来说,对于一个矩阵函数f(X),其导数可以表示为:∂f/∂X = lim(ΔX→0) [f(X+ΔX) - f(X)] / ΔX在这个公式中,对moore-penrose逆矩阵的微分运算就是其中的关键部分。
对于不同类型的矩阵函数,moore-penrose逆矩阵的微分表现出不同的性质,这需要我们对moore-penrose逆矩阵的微分进行深入的研究和探讨。
三、moore-penrose逆矩阵的微分研究现状moore-penrose逆矩阵的微分在数学和工程领域都有着重要的应用。
目前,关于moore-penrose逆矩阵的微分的研究已经取得了一定的成果,例如在最优控制、信号处理、统计估计等领域都有着丰富的应用。
然而,moore-penrose逆矩阵的微分仍然存在许多未解决的问题。
在非线性优化问题中,如何有效地计算moore-penrose逆矩阵的微分仍然是一个挑战。
习题习题判别下列变换是否线性变换?(1)设是线性空间中的一个固定向量,(Ⅰ),,解:当时,显然是的线性变换;当时,有,,则,即此时不是的线性变换。
(Ⅱ),;解:当时,显然是的线性变换;当时,有,,则,即此时不是的线性变换。
(2)在中,(Ⅰ),解:不是的线性变换。
因对于,有,,所以。
(Ⅱ);解:是的线性变换。
设,其中,,则有,。
(3)在中,(Ⅰ),解:是的线性变换:设,则,,。
(Ⅱ),其中是中的固定数;解:是的线性变换:设,则,,。
(4)把复数域看作复数域上的线性空间,,其中是的共轭复数;解:不是线性变换。
因为取,时,有,,即。
(5)在中,设与是其中的两个固定的矩阵,,。
解:是的线性变换。
对,,有,。
习题在中,取直角坐标系,以表示空间绕轴由轴向方向旋转900的变换,以表示空间绕轴由轴向方向旋转900的变换,以表示空间绕轴由轴向方向旋转900的变换。
证明(表示恒等变换),,;并说明是否成立。
证明:在中任取一个向量,则根据,及的定义可知:,,;,,;,,,即,故。
因为,,所以。
因为,,所以。
因为,,所以。
习题在中,,,证明。
证明:在中任取一多项式,有。
所以。
习题设,是上的线性变换。
若,证明。
证明:用数学归纳法证明。
当时,有命题成立。
假设等式对成立,即。
下面证明等式对也成立。
因有,即等式对也成立,从而对任意自然数都成立。
习题证明(1)若是上的可逆线性变换,则的逆变换唯一;(2)若,是上的可逆线性变换,则也是可逆线性变换,且。
证明:(1)设都是的逆变换,则有,。
进而。
即的逆变换唯一。
(2)因,都是上的可逆线性变换,则有,同理有由定义知是可逆线性变换,为逆变换,有唯一性得。
习题设是上的线性变换,向量,且,,,都不是零向量,但。
证明,,,线性无关。
证明:设,依次用可得,得,而,故;同理有:,得,即得;依次类推可得,即得,进而得。
有定义知,,,线性无关。
习题设是上的线性变换,证明是可逆线性变换的充要条件为既是单射线性变换又是满射线性变换,即是一一变换。
微分算子法微分是数学中的一种基本运算,在计算机视觉、自然语言处理、机器学习等领域中有着广泛的应用。
微分算子是一种对函数进行微分的操作符,它是一种线性映射,它接受一个函数并返回它的导数。
在这篇文章中,我们将介绍微分算子及其应用,包括在图像处理中使用的Sobel算子、在自然语言处理中使用的差分算子等。
微分微分是一种基本的数学运算,它是求解函数的变化率的方法。
它通常用符号dy/dx表示。
微分算子是一种对函数进行微分的操作符。
微分的本质是求解函数在一个点处的导数,导数表示函数在这个点附近的变化率。
如果函数在某个点的导数是正的,这意味着函数在这个点附近是上升的。
如果导数是负的,这意味着函数在这个点附近是下降的。
如果导数接近于零,这意味着函数在这个点附近是平稳的。
微分算子是一种对函数进行微分的操作符,它是一种线性映射,它接受一个函数并返回它的导数。
在图像处理中,我们可以使用微分算子来检测像素值的变化,这些变化可能代表着图像中的边缘。
微分算子之所以能够检测到边缘,是因为边缘处的像素值陡然变化,这导致了函数在这个位置的导数的值非常大。
1. 差分算子差分算子是一种顺序差分运算,它可以用来检测一维信号中的变化。
在自然语言处理中,差分算子可以用来检测文本中的单词或词组的出现和排列顺序的变化。
在图像处理中,我们可以使用一维差分算子来分析像素值的变化。
例如,我们可以通过计算某一行或某一列像素值之间的差异来检测边缘。
2. Sobel算子Sobel算子是一种二维微分算子,它可以用来检测图像中的边缘。
Sobel算子的原理是计算图像中每个像素位置的梯度向量。
梯度向量指向图像中像素值变化最大的方向,从而帮助我们找到边缘。
Sobel算子将图像滤波并计算每个像素位置处的梯度向量。
它利用两个矩阵(分别为x 和y方向上的)来计算梯度。
这些矩阵可以根据不同的需求自定义。
图像中每个像素的梯度向量的大小和方向可以通过这些矩阵计算得出。
3. Laplace算子Laplace算子是一种二维微分算子,它可以用来检测图像中的边缘和角点。
数学中的微积分与线性代数在数学领域中,微积分和线性代数是两个重要的分支。
它们分别研究了函数的变化率和向量空间的性质。
本文将对微积分和线性代数的概念、应用和相互关系进行探讨。
一、微积分微积分是研究函数变化率和积分的数学分支。
它主要包括导数和积分两个方面。
导数是函数在某一点的变化率。
对于给定的函数,我们可以通过计算导数来确定其在任意点上的斜率。
这有助于我们理解函数的变化规律,并且在很多实际问题中具有广泛的应用。
例如,在物理学中,导数可以描述一个物体的运动状态;在经济学中,导数可以解释市场需求和供应之间的关系。
积分是导数的逆运算,它可以用来计算曲线下面积或者函数的累加效果。
通过积分,我们可以计算出函数在特定区间上的总变化量,并且在统计学和经济学等领域具有广泛的应用。
例如,在统计学中,积分可以帮助我们计算出概率密度函数下的概率;在经济学中,积分可以用来确定市场需求曲线下的总需求量。
微积分与实际问题的联系紧密,它为我们提供了一套强大的工具来解决变化和积累的数学模型。
二、线性代数线性代数是研究向量空间和线性变换的数学分支。
它主要包括向量、矩阵和线性方程组等概念。
向量是一个有方向和大小的量,它可以用来表示物理量或者其他事物的属性。
向量可以进行加法和数乘运算,而这些运算规则组成了向量空间的基本性质。
线性代数通过研究向量空间的性质,帮助我们理解和描述现实世界中的复杂关系。
矩阵是由数值组成的矩形阵列,它可以表示线性变换和多个变量之间的关系。
矩阵运算以及矩阵的特征值和特征向量等概念在线性代数中扮演着重要的角色。
例如,在计算机图形学中,矩阵可以用来进行坐标变换和图像处理。
线性方程组是由多个线性方程组成的方程组,它是线性代数中的基本问题之一。
通过解线性方程组,我们可以确定未知量的值,并且在工程学和物理学等领域中具有广泛的应用。
例如,在电路分析中,线性方程组可以帮助我们计算电流和电压之间的关系。
线性代数为我们提供了一种强大的工具来描述和解决多变量之间的关系,它在现代科学和工程技术中具有广泛的应用。
矩阵在高等代数中的应用今天,矩阵在很多学科中都被广泛使用,其中最重要的是高等代数,矩阵有着重要的地位和作用,并成为高等代数学科的基础。
首先,矩阵可以用来表示向量。
向量空间是由线性组合的向量所组成的集合,而矩阵可以用来表示从集合中的任意一个向量到另一个集合的映射,具体表示方式往往会以矩阵形式表现。
更具体地讲,矩阵可以表示向量空间中的线性变换,来描述两个向量空间之间的关系,从而可以拓展线性变换的知识。
其次,矩阵也可以用来表示线性方程组。
当求解线性方程组时,通常需要将其转换为矩阵形式,对矩阵进行行列式求解,来解决线性方程组的求解问题,以求得其解析解。
而将方程组写成矩阵形式又叫做矩阵形式的方程,这就是线性方程组的理论基础,没有矩阵,就不可能求解复杂的线性方程组,也就没有可能进行更深入的求解,这也是矩阵在高等代数中有重要作用的重要原因。
此外,矩阵也用来表示多项式,也就是多项式的矩阵表示法。
多项式表示法中,矩阵可以用来表示一元多项式或多元多项式。
同样的,矩阵也被广泛应用于多项式的运算研究,包括多项式的加减乘法,以及多项式的乘方等操作,可以更加便捷的求解这些操作的结果。
再者,矩阵也可以用来表示可微分函数。
通常,矩阵依赖于可微分函数在不同方向上的运算,可以用矩阵的形式来自动的求解这些可微分函数的极值点或函数的一阶导数,也可以用矩阵的形式来表示多元高次可微分函数,这也是矩阵在高等代数中可以用来解决复杂问题的优点。
最后,矩阵也可以用来表示复变函数,因此也可以用矩阵来求解复变函数的运算结果,扩展复变函数的分析研究,以及推导复变函数的区域性等特点,也是矩阵在高等代数中的应用。
总的来说,矩阵在高等代数中有着重要的作用,有了矩阵的存在,对高等代数的推导有着巨大的帮助,这就是它在高等代数中的重要性。
矩阵数学矩阵是数学中的一个基本概念,它是由数个数按照一定规律排列组合而成的一种数学结构。
矩阵理论在现代数学以及物理、工程等学科中都有着广泛的应用。
在本文中,我们将深入探讨矩阵以及相关的数学知识,以期加深对矩阵及其应用的理解。
一、矩阵的基本概念我们首先要了解矩阵的基本概念。
在数学中,我们把由m行n列的数排成一个m×n的矩阵,称之为“m行n列的矩阵”。
通常,我们用大写字母来表示矩阵,用小写字母来表示矩阵中的元素。
例如,一个矩阵A可以表示为:[A11 A12 A13 (1)A21 A22 A23 (2)…Am1 Am2 Am3…Amn]在矩阵中,每个元素都有一个唯一的位置,可以通过坐标(行,列)来进行表示。
例如,在上述矩阵中,元素A23表示的是第2行第3列的元素。
二、矩阵的运算规则在数学中,我们可以对矩阵进行加、减、乘、转置等运算。
其中,加、减运算是指同一位置的元素分别相加、相减,矩阵的大小必须相同;乘运算是指将第一个矩阵的每一行分别与第二个矩阵的每一列进行乘法运算,然后将结果相加得到新的矩阵;转置运算则是将矩阵的行列互换。
这些运算规则的应用十分广泛,例如在线性代数、微积分、概率论等学科中都有着应用。
三、矩阵的应用矩阵作为数学中的一种重要的数学结构,其应用十分广泛。
例如,在物理学中,我们可以通过使用矩阵的乘法运算来计算光的传播过程,其中矩阵表示的是介质的折射率和几何构型等信息;在机器学习中,矩阵则可以用来表示多个变量的关系,进而实现模型的构建和预测。
总之,矩阵是数学中的一个基本概念,它广泛应用于现代数学、物理、工程等学科,并且在科技发展中扮演着重要的角色。
我们可以通过深入学习相关的矩阵理论以及应用,来更好地理解矩阵及其在现代科技中的重要性。