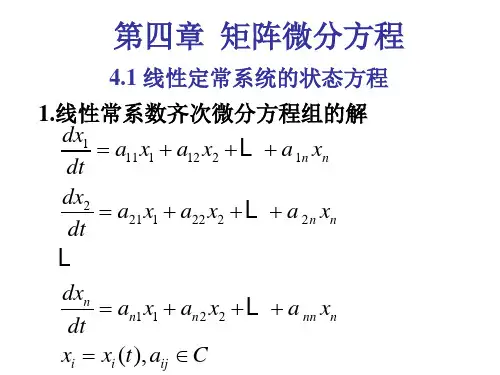
矩阵微分方法
- 格式:pdf
- 大小:155.31 KB
- 文档页数:21
微分变换法构建雅可比矩阵
微分变换法是一种用于构建雅可比矩阵的方法,雅可比矩阵在
数学和物理学中有着广泛的应用。
雅可比矩阵是一个矩阵,其元素
由一个向量值函数的偏导数组成。
在微分变换法中,我们可以利用
偏导数的概念来构建雅可比矩阵。
首先,我们需要明确一个向量值函数。
假设我们有一个向量值
函数f(x) = [f1(x), f2(x), ..., fn(x)],其中fi(x)表示函数f
在第i个分量上的取值。
现在,我们想要构建雅可比矩阵J,其元
素由函数f的偏导数组成。
为了构建雅可比矩阵,我们需要计算函数f的每个分量对于自
变量x的偏导数。
具体来说,雅可比矩阵J的第i行第j列的元素
是函数fi对于xj的偏导数。
换句话说,J的第i行是函数f在第i
个分量上对所有自变量的偏导数构成的向量。
通过微分变换法,我们可以逐个计算每个分量对于自变量的偏
导数,然后将这些偏导数组成的向量作为雅可比矩阵的一行。
最终,我们就可以得到完整的雅可比矩阵J。
需要注意的是,构建雅可比矩阵时需要对函数f进行偏导数的计算,这可能涉及到一些复杂的数学运算和求导规则。
此外,雅可比矩阵在优化问题、微分方程求解、机器学习等领域有着重要的应用,因此构建雅可比矩阵的方法也具有很高的实用价值。
总之,微分变换法是一种用于构建雅可比矩阵的方法,通过计算向量值函数对自变量的偏导数,我们可以得到雅可比矩阵,从而在数学建模和实际问题求解中发挥重要作用。
题目:深入探讨ode45算法在求解矩阵形式常微分方程中的应用在数学和工程学领域中,常微分方程是一个非常重要的概念,它描述了自然界和工程学中许多现象的动态过程。
矩阵形式的常微分方程更是在控制论、动力学等领域中应用广泛,但是由于其更为复杂的形式,如何高效地求解成为了一个挑战。
本文将围绕ode45算法在求解矩阵形式常微分方程中的应用展开讨论。
1. 常微分方程的矩阵形式让我们简单回顾一下常微分方程的矩阵形式。
在控制论和动力学中,经常会遇到如下形式的矩阵微分方程:\[ \frac{d\mathbf{x}}{dt} = \mathbf{A}\mathbf{x} \]其中,\( \mathbf{x} \) 为状态向量,\( \mathbf{A} \) 为系统矩阵。
这种形式的常微分方程描述了一个系统中状态变量随时间的演化规律。
2. ode45算法简介ode45算法是MATLAB中用于求解常微分方程初值问题的函数,它采用的是一种自适应步长的Runge-Kutta法。
它能够有效地处理各种类型的常微分方程,包括刚才所述的矩阵形式常微分方程。
3. ode45算法在求解矩阵形式常微分方程中的应用在实际工程和科学计算中,常常会遇到需要求解矩阵形式常微分方程的问题。
需要注意的是,对于这类问题,我们需要重新定义ode45算法中的函数。
具体来说,我们需要将原始的矩阵形式常微分方程转化为一个向量形式的常微分方程,并在ODE函数中对其进行处理。
这一步骤需要一定的技巧和理解,但是一旦完成,就可以利用ode45算法高效地求解矩阵形式的常微分方程了。
4. 个人观点与总结在实际工程中,矩阵形式的常微分方程求解往往是一个复杂而又重要的问题。
ode45算法作为MATLAB中的一个强大工具,为我们提供了一种高效求解矩阵形式常微分方程的途径。
通过对ode45算法的灵活运用,我们可以更好地理解和分析系统的动态行为,为工程实践提供有力支持。
本文深入探讨了ode45算法在求解矩阵形式常微分方程中的应用,希望对读者在工程实践中遇到类似问题时能够提供帮助。
二重积分的矩阵微积分和线性代数一、二重积分的基本概念和计算方法二重积分是微积分中的一种重要工具,主要用来计算平面上某个区域内的函数值的总和。
它的基本概念是将一个二元函数在平面上的一个区域内作为被积函数,然后将该区域划分成无数个小块,每个小块对应一个微小的面积ΔS,然后将全域划分成无数个小块,每个小块对应一个微小的面积ΔS,然后对每个小块上函数值与面积的乘积f(x,y)ΔS进行求和,从而得到二重积分的结果。
在计算二重积分的过程中,需要使用到一些基本的计算方法和技巧。
例如,可以采用极坐标系的方法来简化问题;也可以采用换元法来进行变量替换,以简化被积函数的表达式。
此外,还需要灵活运用积分的性质和定理,如线性性、累次积分等。
二、二重积分在矩阵微积分中的应用矩阵微积分是一门重要的数学分支,在计算机科学、控制工程、物理学、统计学等领域都有广泛的应用。
矩阵微积分与二重积分的联系,在于二重积分可以看作是矩阵微积分中“积分”的一种特殊形式,即对多元连续函数进行积分的方式。
具体来说,可以将函数f(x,y)表示为一个矩阵M=[f(x,y)],然后将平面上的某个区域看作一个矩形,其边界由四条参数曲线x=x0,x=x1,y=y0和y=y1组成。
那么,此时的二重积分就可以看作是对矩阵M在该区域上的积分,即:∬Rf(x,y)dxdy = ∫∫DMdV其中DM表示矩阵M在该区域上的微小面积,dV表示该微小面积的体积元素。
这种矩阵微积分的方法可以广泛应用于信号处理、图像处理等领域,并且具有较强的数学基础和理论基础。
三、二重积分在线性代数中的应用线性代数是一门研究向量空间和线性变换的数学分支,对于形状学、几何学与编程设计等领域有着广泛的应用。
二重积分在线性代数中的应用,主要体现在它可以用来描述和计算某个函数在向量空间内的投影和内积。
例如,如果将二元函数f(x,y)表示为一个向量v=[f(x,y)],那么在某个区域R上的二重积分就可以看作是向量v在该区域上的投影,即:∬Rf(x,y)dxdy = <v,u>其中u表示在该区域上的一组基向量,通过一些变量替换和基变换的方式,可以将该二元函数转换成标准形式,从而方便计算。
方向余弦矩阵的微分方程求解方向余弦矩阵是描述刚体在空间中姿态变化的重要工具,它可以将刚体的旋转转化为矩阵运算。
在机器人学、航空航天等领域中,方向余弦矩阵的微分方程求解对于姿态控制和导航非常关键。
姿态是刚体相对于参考坐标系的方向,它可以由方向余弦矩阵表示。
方向余弦矩阵是一个3×3的矩阵,其中的元素描述了刚体在空间中的旋转关系。
我们假设刚体的初始姿态为单位阵,即方向余弦矩阵为单位矩阵。
刚体的姿态变化可以由方向余弦矩阵的微分方程描述。
假设刚体在空间中绕着某个轴进行旋转,我们可以通过微分方程来求解方向余弦矩阵的变化。
我们定义一个表示刚体角速度的向量ω,在刚体坐标系下表示为[ωx, ωy, ωz],其中ωx、ωy、ωz分别表示绕x轴、y轴、z轴的角速度。
刚体的角速度向量可以通过方向余弦矩阵与角速度在参考坐标系下的表示之间的关系计算得到。
然后,我们可以得到方向余弦矩阵的微分方程:dC/dt = Cω_hat其中,dC/dt表示方向余弦矩阵的微分,C表示方向余弦矩阵,ω_hat表示角速度向量的斜对称矩阵。
方向余弦矩阵的微分方程描述了刚体姿态的变化速率与角速度的关系。
通过求解方向余弦矩阵的微分方程,我们可以得到刚体姿态的变化规律。
在实际应用中,可以利用数值求解方法,如欧拉法、龙格-库塔法等,来求解微分方程的数值解。
方向余弦矩阵的微分方程求解对于姿态控制和导航具有重要意义。
它可以帮助我们理解刚体在空间中的旋转规律,并为机器人、航空器等的姿态控制提供基础。
对于航天器的导航来说,方向余弦矩阵的微分方程求解可以帮助我们准确地预测航天器的姿态变化,从而实现精确的导航和定位。
方向余弦矩阵的微分方程求解是研究刚体姿态变化的重要内容。
通过求解微分方程,可以揭示刚体姿态的变化规律,并为姿态控制和导航提供理论支持。
在实际应用中,我们可以利用数值求解方法来求解微分方程,从而实现对刚体姿态的精确控制和导航。
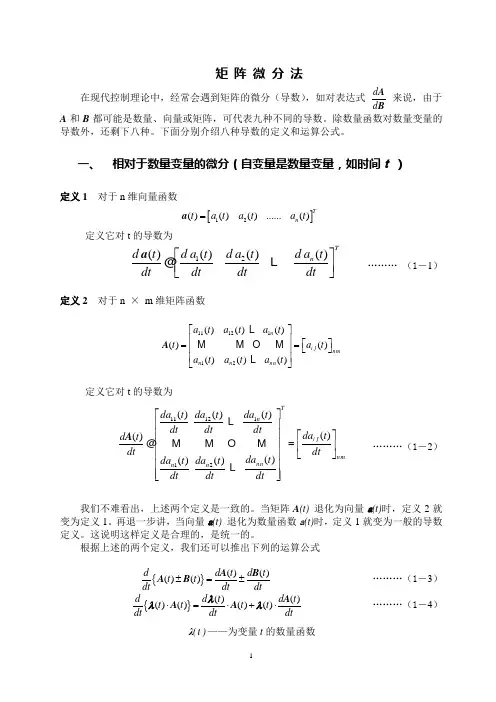
矩 阵 微 分 法在现代控制理论中,经常会遇到矩阵的微分(导数),如对表达式d d AB来说,由于A 和B 都可能是数量、向量或矩阵,可代表九种不同的导数。
除数量函数对数量变量的导数外,还剩下八种。
下面分别介绍八种导数的定义和运算公式。
一、 相对于数量变量的微分(自变量是数量变量,如时间t )定义1 对于n 维向量函数[]12()()()......()Tn t a t a t a t = a定义它对t 的导数为12()()()()Tn d a t d a t d a t d t dt dtdt dt ⎡⎤⎢⎥⎣⎦a ……… (1-1)定义2 对于n × m 维矩阵函数1112112()()()()()()()()n i j nm n n nn a t a t a t t a t a t a t a t ⎡⎤⎢⎥⎡⎤= =⎢⎥⎣⎦⎢⎥ ⎣⎦A定义它对t 的导数为1111212()()()()()()()()Tn i j n m n nn n da t da t da t dt dt dt da t d t dt dt da t da t da t dt dt dt ⎡⎤ ⎢⎥⎢⎥⎡⎤ =⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥ ⎢⎥⎣⎦ A ………(1-2)我们不难看出,上述两个定义是一致的。
当矩阵A (t) 退化为向量a (t)时,定义2就变为定义1。
再退一步讲,当向量a (t) 退化为数量函数a (t)时,定义1就变为一般的导数定义。
这说明这样定义是合理的,是统一的。
根据上述的两个定义,我们还可以推出下列的运算公式{}()()()()d d t d t t t dt dt dt ±=±A B A B ………(1-3) {}()()()()()()d d t d t t t t t dt dt dt⋅=⋅+⋅A A A λλλ ………(1-4) (t )λ——为变量t 的数量函数{}()()()()()()d d t d t t t t t dt dt dt⋅=⋅+⋅A B A B B A ………(1-5) 这些公式都很容易证明,现证明最后一式(1-5),设矩阵A (t) 和B (t) 分别为n ×m 和m ×l 矩阵证:11121112()()()()()()()()()T n T n n nm n a t a t a t t t a t a t a t t ⎡⎤⎡⎤ ⎢⎥⎢⎥= = ⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦a A a[]111211212()()()()()()()()()()m m m b t b t b t t t t t b t b t b t ⎡⎤ ⎢⎥= = ⎢⎥⎢⎥ ⎣⎦B b b b1111()()()()()()()()()()()()T TTi j n T T n n t t t t t t t t t t t t ⎡⎤ ⎢⎥⎡⎤⋅= =⋅⎢⎥⎣⎦⎢⎥⎣⎦a b a b A B a b a b a b从而根据矩阵导数定义2,有[]()()()()()()()()()()()()Ti j n T j Ti j i n d d t t t t dt dtd t d t d t d t t t t t dtdt dt dt ⎡⎤⋅=⋅⎣⎦⎡⎤ =⋅+⋅=⋅+⋅⎢⎥⎣⎦A B a b b a A B b a B A证毕例1:求T X A X 对t 的导数,其中1()()n x t x t ⎡⎤⎢⎥= ⎢⎥⎢⎥⎣⎦ X 1111n n n n a a a a ⎡⎤⎢⎥= ⎢⎥⎢⎥⎣⎦A —— 对称常系数矩阵 解()[]()2d d d dt dt dtd d d dt dt dt ⋅⋅⋅=⋅+⋅ =⋅+⋅⋅ =⋅⋅+⋅⋅⋅⋅+⋅⋅ =+ = T X A X X A X A X X X A XA X X X A XA X X A X X A X X A X X AXX AX X AX T TT T T T T T T T T T +=()即2T T d ()dt=X A X X A X ………(1-6) 注:T XA X 和T X A X 都是数量函数且A 为对称阵,它们等于自己的转置。
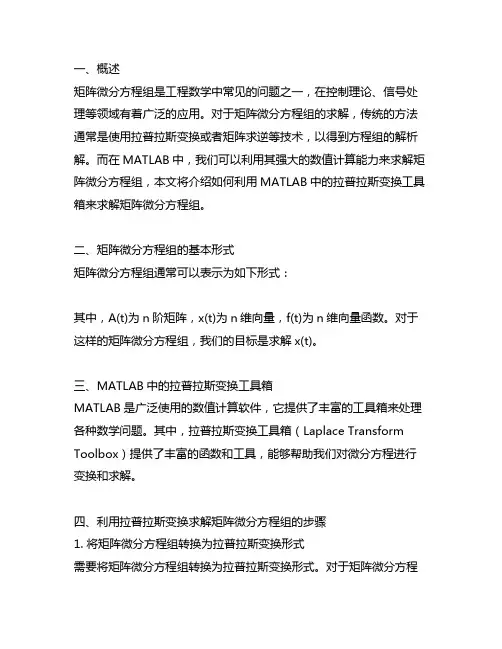
一、概述矩阵微分方程组是工程数学中常见的问题之一,在控制理论、信号处理等领域有着广泛的应用。
对于矩阵微分方程组的求解,传统的方法通常是使用拉普拉斯变换或者矩阵求逆等技术,以得到方程组的解析解。
而在MATLAB中,我们可以利用其强大的数值计算能力来求解矩阵微分方程组,本文将介绍如何利用MATLAB中的拉普拉斯变换工具箱来求解矩阵微分方程组。
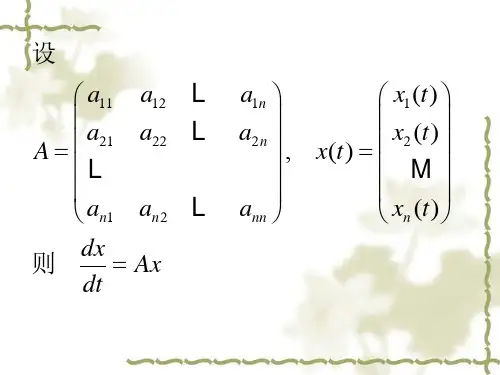
二、矩阵微分方程组的基本形式矩阵微分方程组通常可以表示为如下形式:其中,A(t)为n阶矩阵,x(t)为n维向量,f(t)为n维向量函数。
对于这样的矩阵微分方程组,我们的目标是求解x(t)。
三、MATLAB中的拉普拉斯变换工具箱MATLAB是广泛使用的数值计算软件,它提供了丰富的工具箱来处理各种数学问题。
其中,拉普拉斯变换工具箱(Laplace Transform Toolbox)提供了丰富的函数和工具,能够帮助我们对微分方程进行变换和求解。
四、利用拉普拉斯变换求解矩阵微分方程组的步骤1. 将矩阵微分方程组转换为拉普拉斯变换形式需要将矩阵微分方程组转换为拉普拉斯变换形式。
对于矩阵微分方程组,我们可以利用拉普拉斯变换的线性性质来进行变换,得到矩阵X(s)的表达式。
2. 求解拉普拉斯变换后的代数方程接下来,我们需要对拉普拉斯变换后的代数方程进行求解,得到矩阵X(s)的表达式。
3. 对结果进行拉普拉斯逆变换我们需要对求解得到的矩阵X(s)的表达式进行拉普拉斯逆变换,得到最终的解x(t)。
五、实例演示下面,我们通过一个具体的矩阵微分方程组来演示如何利用MATLAB 的拉普拉斯变换工具箱来求解。
假设我们有如下的矩阵微分方程组:A(t) = [1 2; 3 4],x(t) = [x1(t); x2(t)],f(t) = [t; 1]我们首先需要将矩阵微分方程组转换为拉普拉斯变换形式,然后求解得到矩阵X(s)的表达式。
对结果进行拉普拉斯逆变换,得到最终的解x(t)。
```matlabsyms s t;A = [1 2; 3 4];f = [t; 1];X = inv(s*eye(2) - A)*f;x = ilaplace(X, s, t);disp(x);```运行上述代码,我们可以得到矩阵微分方程组的解x(t)的表达式。
向量和矩阵的微分
向量和矩阵的微分是数学中的一个重要概念,它们在很多领域中都有广泛的应用。
向量和矩阵的微分可以分为两种类型:
1.一阶微分:对于一个向量和一个矩阵,一阶微分是指对于它们的每个元
素,求其微分值。
一阶微分的公式为:
∂²u/∂x² = ∂²u/∂x + ∂²v/∂x²
其中,u和v是向量和矩阵,x是自变量。
2.二阶微分:对于一个向量和一个矩阵,二阶微分是指对于它们的每个元
素,求其微分值的平方。
二阶微分的公式为:
∂²u/∂x²^2 = ∂²u/∂x² + ∂²v/∂x²^2
其中,u和v是向量和矩阵,x是自变量。
需要注意的是,向量和矩阵的微分是一个非常复杂的问题,它涉及到微积分、线性代数等多个领域的知识。
在实际应用中,需要根据具体问题选择合适的微分方法,并进行相应的数学推导和计算。

矩阵微分法1向量的导数: 对于n 维向量函数12()()()()Tn t e t e t e t 轾=犏臌e L(1)其对t 的导数定义为:12()()()()Tn d e t d e t d e t d t d td t d td t轾犏=犏臌e L(2)矩阵导数: ()m nt ´ÎA ¡对t 的导数定义为:()()i j m nd a t d t d td t ´轾犏=犏犏臌A(3)因此易知: ()d d d d t d td t ?A B A B (4)()d d d d td td tl l l=+A A A(5)对于两向量相乘, 易知:11()()nnTTTi i i i i i i i d a d b d d d d a b b a d td td t d t d td t==骣÷ç÷==+=+ç÷ç÷ç桫邋a ba b b a(6)而对于矩阵相乘: Ti jn l´轾=犏臌A B a b (7)易知:()T j TTii jj in ln ld d dd d d d t d t d t d t d td t´´轾轾犏犏==+=+犏犏臌犏臌b a A B A B a b b a B A(8)应用: 关于函数T e M e 对t 的导数, 其中M 为对称阵:()()2TTTTTT T TT T d d dd td td td d d d t d t d t=+骣÷ç=++÷ç÷ç÷桫=++=+eeM eM e eM e e M e M e e e M eM e e M e e M e e M ee M e &&&&&(9)特别地, 当M 为常数阵时: ()2T Td d t=e M e e M e & (10)当=M I时:()22T T Td d t=e e e e =e e&& (11)(注意: 在其他定义的矩阵求导中, 求导后需对矩阵再作转置, 但实质还是一样的, 此处不考虑.)1胡寿松, 自动控制原理 第四版, 科学出版社, 2001. pp.610-611。
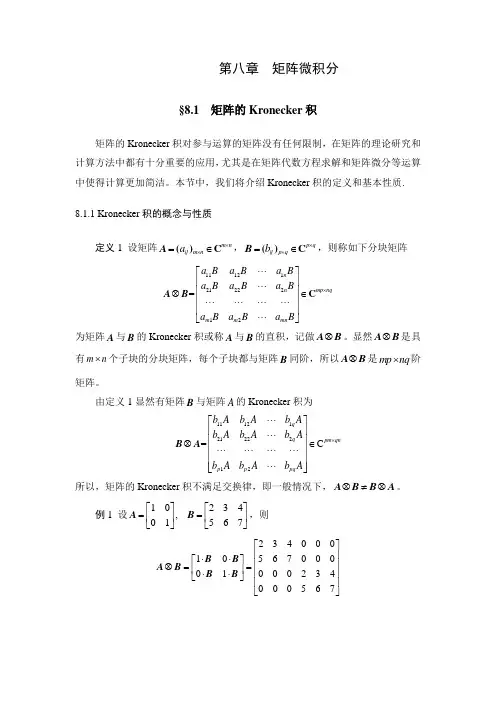
第八章 矩阵微积分§8.1 矩阵的Kronecker 积矩阵的Kronecker 积对参与运算的矩阵没有任何限制,在矩阵的理论研究和计算方法中都有十分重要的应用,尤其是在矩阵代数方程求解和矩阵微分等运算中使得计算更加简洁。
本节中,我们将介绍Kronecker 积的定义和基本性质. 8.1.1 Kronecker 积的概念与性质定义1 设矩阵()C m n ij m n a ⨯⨯=∈A ,()C p q ij p q b ⨯⨯=∈B ,则称如下分块矩阵111212122212=C n n mp nq m m mn a B a Ba B a B a Ba B a B a Ba B ⨯⋅⋅⋅⎡⎤⎢⎥⋅⋅⋅⎢⎥⊗∈⎢⎥⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⎢⎥⋅⋅⋅⎣⎦A B 为矩阵A 与B 的Kronecker 积或称A 与B 的直积,记做⊗A B 。
显然⊗A B 是具有m n ⨯个子块的分块矩阵,每个子块都与矩阵B 同阶,所以⊗A B 是mp nq ⨯阶矩阵。
由定义1显然有矩阵B 与矩阵A 的Kronecker 积为111212122212=C q q pm qn p p pq b A b A b A b A b A b A b A b A b A ⨯⋅⋅⋅⎡⎤⎢⎥⋅⋅⋅⎢⎥⊗∈⎢⎥⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⎢⎥⋅⋅⋅⎢⎥⎣⎦B A所以,矩阵的Kronecker 积不满足交换律,即一般情况下,⊗≠⊗A B B A 。
例1 设10234,01567⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦A B ,则 2340001056700001000234000567⎡⎤⎢⎥⋅⋅⎡⎤⎢⎥⊗==⎢⎥⎢⎥⋅⋅⎣⎦⎢⎥⎣⎦B B A B B B203040234020304567506070050607⎛⎫⎪⋅⋅⋅⎛⎫ ⎪⊗== ⎪⎪⋅⋅⋅⎝⎭ ⎪⎝⎭A A AB A A A A 显然,⊗≠⊗A B B A 。
从定义1可以直接给出Kronecker 积简单的运算性质如下。
矩阵范数的次微分
矩阵范数是衡量矩阵大小的一种方式,它可以用于分析矩阵的性质以及解决各种数学和工程问题。
在应用矩阵范数进行优化或求解问题时,了解矩阵范数的次微分是非常重要的。
矩阵范数的次微分是指对于一个矩阵范数函数,计算其关于矩阵的一阶导数或二阶导数。
次微分主要用于优化算法中的梯度计算和牛顿法等二阶优化方法。
在计算矩阵范数的次微分时,我们可以使用不同的方法。
一种常见的方法是使用矩阵微积分的知识,将矩阵范数函数展开成关于矩阵元素的表达式,然后计算导数。
另一种方法是使用矩阵微分运算的性质,如矩阵迹运算和矩阵转置的性质,来推导次微分的公式。
对于一些常见的矩阵范数,次微分的公式已经被广泛研究和证明。
例如,对于矩阵的Frobenius范数,其次微分可以通过对矩阵的元素进行求导来得到。
对于矩阵的核范数(也称为谱范数),其次微分可以通过对矩阵的奇异值进行求导来得到。
矩阵范数的次微分在求解矩阵优化问题中起着关键的作用。
通过计算次微分,我们可以得到关于矩阵的梯度信息,从而可以应用梯度下降等优化算法来求解问题。
此外,次微分还可以用于解决矩阵方程、矩
阵最小化问题等。
总之,矩阵范数的次微分是矩阵分析中的一个重要概念,它在应用矩阵范数进行优化和求解问题时起着至关重要的作用。
深入理解矩阵范数的次微分可以帮助我们更好地理解矩阵的性质,并将其应用于实际问题的求解中。
在网上看到有人贴了如下求导公式:Y = A * X --> DY/DX = A'Y = X * A --> DY/DX = AY = A' * X * B --> DY/DX = A * B'Y = A' * X' * B --> DY/DX = B * A'于是把以前学过的矩阵求导部分整理一下:1. 矩阵Y对标量x求导:相当于每个元素求导数后转置一下,注意M×N矩阵求导后变成N×M了Y = [y(ij)] --> dY/dx = [dy(ji)/dx]2. 标量y对列向量X求导:注意与上面不同,这次括号内是求偏导,不转置,对N×1向量求导后还是N×1向量y = f(x1,x2,..,xn) --> dy/dX = (Dy/Dx1,Dy/Dx2,..,Dy/Dxn)'3. 行向量Y'对列向量X求导:注意1×M向量对N×1向量求导后是N×M矩阵。
将Y的每一列对X求偏导,将各列构成一个矩阵。
重要结论:dX'/dX = Id(AX)'/dX = A'4. 列向量Y对行向量X’求导:转化为行向量Y’对列向量X的导数,然后转置。
注意M×1向量对1×N向量求导结果为M×N矩阵。
dY/dX' = (dY'/dX)'5. 向量积对列向量X求导运算法则:注意与标量求导有点不同。
d(UV')/dX = (dU/dX)V' + U(dV'/dX)d(U'V)/dX = (dU'/dX)V + (dV'/dX)U'重要结论:d(X'A)/dX = (dX'/dX)A + (dA/dX)X' = IA + 0X' = Ad(AX)/dX' = (d(X'A')/dX)' = (A')' = Ad(X'AX)/dX = (dX'/dX)AX + (d(AX)'/dX)X = AX + A'X6. 矩阵Y对列向量X求导:将Y对X的每一个分量求偏导,构成一个超向量。
对于二阶矩阵微分方程,其一般形式可以表示为:
d^2F/dt^2 = B * dF/dt + C * F
其中,F是一个矩阵,B和C是常数矩阵。
这个方程描述了矩阵F关于时间t的二阶微分行为,与一阶导数和二阶导数有关。
解决这个方程需要用到矩阵微分的知识,以及相关的数学工具和方法。
具体的解法会根据B和C的具体形式以及F的初始条件和边界条件而有所不同。
在知乎等社区平台上,有很多专业人士和爱好者分享他们对于矩阵微分方程的理解和解决方案。
你可以在这些平台上搜索相关的话题或者提问,与他们交流和学习。
同时,也可以参考相关的数学教材和文献,了解更多关于矩阵微分方程的理论和应用。
Matlab求解矩阵微分方程1. 引言矩阵微分方程是一种涉及矩阵和其导数的方程,研究矩阵变量的动力学行为。
Matlab作为一种强大的数值计算软件,提供了丰富的工具和函数来求解矩阵微分方程,使得研究者可以方便地进行相关计算和分析。
本文将介绍如何使用Matlab求解矩阵微分方程的基本方法和技巧。
2. Matlab中的矩阵微分方程求解函数Matlab中提供了几种用于求解矩阵微分方程的函数,其中最常用的是ode45和ode15s。
这两个函数基于不同的算法和策略,可用于求解不同类型的矩阵微分方程。
下面将分别介绍这两个函数的基本使用方法。
2.1 ode45函数ode45函数是Matlab中用于求解一般的非刚体微分方程的函数,也可以用于求解矩阵微分方程。
其基本使用方法如下:[t, y] = ode45(@(t, y) A*y, tspan, y0)其中,t是时间向量,y是解向量,A是矩阵微分方程的系数矩阵,tspan是时间区间,y0是初始条件。
在求解过程中,ode45会根据给定的时间区间和初始条件,自动选择合适的步长和算法进行计算,并返回时间向量和解向量。
2.2 ode15s函数ode15s函数是Matlab中用于求解刚体微分方程的函数,也可以用于求解矩阵微分方程。
它在求解过程中采用了一种更稳定的算法,对于刚性问题有较好的适应性。
其基本使用方法如下:[t, y] = ode15s(@(t, y) A*y, tspan, y0)与ode45函数类似,ode15s函数也会根据给定的时间区间和初始条件,自动选择合适的步长和算法进行计算,并返回时间向量和解向量。
3. 求解矩阵微分方程的示例现在我们来通过一个具体的示例来展示如何使用Matlab求解矩阵微分方程。
考虑以下的矩阵微分方程:dYdt=AY其中,A=[−12−2−1]初始条件为:Y(0)=[1 0]下面是使用Matlab求解矩阵微分方程的代码:A = [-1, 2; -2, -1];tspan = [0, 10];y0 = [1; 0];[t, y] = ode45(@(t, y) A*y, tspan, y0);plot(t, y(:, 1), 'r', t, y(:, 2), 'b');legend('y_1', 'y_2');xlabel('Time');ylabel('Solution');代码中的ode45函数将根据给定的参数求解矩阵微分方程,并返回时间向量t和解向量y。
矩阵中的矩阵微积分矩阵微积分是线性代数中的一门重要分支,它将微积分的概念和矩阵运算的技巧相结合,增强了线性代数的理论体系和应用能力。
矩阵微积分研究的是矩阵函数的导数和积分、矩阵微分方程以及相关的数学模型和优化算法等。
本文将从三个方面介绍矩阵微积分的基本概念、应用范围以及研究进展,帮助读者深入了解这门重要课程。
一、矩阵微积分的基本概念矩阵微积分的基本概念包括导数、偏导数、积分、微分方程和泰勒公式等。
其中,矩阵函数的导数定义为极限值,偏导数定义为矩阵函数在某个方向上的变化率,积分定义为矩阵函数的面积或体积,微分方程定义为关系一个或多个未知函数、它们的导数和自变量的方程,泰勒公式定义为用无穷阶导数刻画一个矩阵函数在某个区间内的变化趋势。
这些基本概念构成了矩阵微积分的理论基础,为后续的应用提供了强有力的数学支撑。
二、矩阵微积分的应用范围矩阵微积分的应用范围广泛,涵盖了许多不同的学科领域,例如物理学、工程学、计算机科学、金融等。
其中,最为常见的应用是通过矩阵微积分来解决优化问题。
优化问题是指在满足一定约束条件的前提下,使某一目标函数达到最优值的问题。
有了矩阵微积分的支持,我们可以通过求解函数的导数来确定函数的最大值和最小值,从而解决一系列优化问题,例如线性规划、非线性规划、整数规划等。
此外,矩阵微积分还可以用来构建回归分析、时间序列分析、图像处理等各种数学模型,为现代科技的发展提供技术支持。
三、矩阵微积分的研究进展矩阵微积分的研究进展主要体现在以下几个方面:矩阵微积分与偏微分方程的联系、矩阵微积分和概率统计的关系、矩阵微积分在机器学习中的应用等。
其中,矩阵微积分和偏微分方程的联系是一个经典的数学问题,在很多实际问题中都有广泛应用。
数值分析的技术进步,使得矩阵微积分和偏微分方程的求解更加高效和精确。
矩阵微积分和概率统计的关系也是一个热门研究领域,它在矩阵统计、贝叶斯统计、贝尔曼方程等方面都有广泛应用。
矩阵微积分在机器学习中的应用则是当前研究热点之一,它涉及到最小二乘法、核方法、降维等多个方面,为机器学习领域的发展提供了重要的数学基础和算法支持。
matlab求矩阵微分方程在MATLAB中求解矩阵微分方程可以使用ode45函数。
首先,我们需要定义一个函数来表示矩阵微分方程。
假设我们要求解的矩阵微分方程为dx/dt = Ax,其中A是一个已知的矩阵,x是未知的矩阵函数。
首先,我们需要定义一个函数,例如命名为matrixODE,来表示微分方程。
函数的输入参数为时间t和矩阵x,输出参数为矩阵dx/dt。
函数的代码如下:matlab.function dxdt = matrixODE(t, x)。
A = [1 2; 3 4]; % 示例中的矩阵A.dxdt = A x;end.接下来,我们可以使用ode45函数来求解微分方程。
ode45函数是MATLAB中常用的求解常微分方程的函数,也可以用于求解矩阵微分方程。
matlab.tspan = [0 10]; % 时间范围。
x0 = [1; 1]; % 初始条件。
[t, x] = ode45(@matrixODE, tspan, x0);上述代码中,tspan定义了时间的范围,x0是初始条件,@matrixODE表示要求解的微分方程函数。
ode45函数会返回时间数组t和对应的矩阵函数值数组x。
最后,我们可以将结果绘制成图形来观察矩阵函数随时间的变化。
matlab.plot(t, x(:, 1), 'r', t, x(:, 2), 'b');legend('x1', 'x2');xlabel('时间');ylabel('矩阵函数值');上述代码将绘制出矩阵函数x的每个分量随时间的变化曲线,并添加图例和坐标轴标签。
这样,我们就可以使用MATLAB求解矩阵微分方程并进行可视化了。
当然,具体的矩阵微分方程形式和初始条件需要根据实际问题进行调整。