微悬臂梁气体传感器研究
- 格式:docx
- 大小:182.47 KB
- 文档页数:6

悬臂梁电阻应变综合测量实验总结与体会一、实验目的二、实验原理三、实验步骤四、实验结果与分析五、误差分析六、实验体会一、实验目的本次悬臂梁电阻应变综合测量实验的主要目的是通过对悬臂梁在受力情况下电阻值和应变值的测量,来掌握电阻应变片的基本原理和测量方法,并学习如何进行数据处理和误差分析,提高实验操作能力和数据处理能力。
二、实验原理1. 悬臂梁受力分析在本次实验中,我们使用了一根长度为L,截面积为A,杨氏模量为E 的金属杆作为悬臂梁。
当该杆受到外力F时,由于其自身刚度限制,会发生形变。
此时,在距离支点x处处取一个微小长度dx,在这个微小长度内,由于形变而产生的微小位移dy可以表示为:dy = (F * x / EI) * dx^2其中EI是弯曲刚度系数。
2. 应变计原理应变计是一种利用金属电阻率随应变而发生改变来进行应变测量的传感器。
在本次实验中,我们使用的是电阻应变片。
当应变计受到外力而发生形变时,其内部的电阻值也会随之发生变化。
根据欧姆定律,电阻值和电流、电压之间的关系为:R = V / I由此可以得到应变计输出的电压与其内部电阻值之间的关系:V = R * I在本次实验中,我们使用了一个称为“维氏桥”的电路来测量应变计输出的电压,并通过计算来得到应变值。
三、实验步骤1. 实验器材准备:悬臂梁、应变计、维氏桥等。
2. 实验前准备:将悬臂梁固定在实验台上,并将应变计粘贴在悬臂梁上。
3. 测量初始长度:使用游标卡尺等工具测量悬臂梁初始长度L0。
4. 测量外力:使用天平等工具测量施加在悬臂梁上的外力F。
5. 测量电阻值:通过连接维氏桥和应变计,测量应变计输出的电压,并根据维氏桥的原理得出应变计内部电阻值R。
6. 测量应变值:根据应变计输出的电压和内部电阻值,计算出应变值。
7. 测量位移:通过连接位移传感器等工具,测量悬臂梁在受力情况下的微小位移。
8. 数据处理:根据测量结果,计算出悬臂梁的弯曲刚度系数EI,并绘制出应变与位移、应变与电阻值之间的关系图。

一、概述随着科技的不断发展,传感器技术在各个领域中的应用也在不断拓展。
其中,气体传感器作为一种重要的传感器类型,在环保监测、工业控制、医疗诊断等领域具有广泛的应用前景。
本文旨在介绍一种新型的微悬臂梁气体传感器及其制作方法,希望能为相关研究和应用提供参考。
二、微悬臂梁气体传感器的原理1. 微悬臂梁结构微悬臂梁气体传感器是一种基于微纳技术的传感器,其主要结构包括悬臂梁、传感层和敏感器。
其中,悬臂梁是传感器的关键部件,其主要作用是在气体作用下发生微小的位移,从而实现对气体浓度的检测。
2. 工作原理当待测气体进入传感器内部时,气体分子与传感层发生作用,使传感层发生变化,从而导致悬臂梁产生微小位移。
这种微小位移可以通过传感器测量装置进行精确测量,最终实现对气体浓度的检测。
三、制作微悬臂梁气体传感器的方法1. 制备悬臂梁需要选择合适的材料,如硅、玻璃等,通过光刻、腐蚀等工艺制备出悬臂梁的结构。
在此过程中,需要严格控制工艺参数,确保悬臂梁的结构稳定、尺寸精确。
2. 涂覆传感层传感层的选择和涂覆工艺对传感器的性能有着重要影响。
在选用合适的传感层材料后,需要通过旋涂、溅射等工艺将传感层均匀涂覆在悬臂梁上,并进行后续的固化处理,以确保传感层的稳定性和传感性能。
3. 敏感器的组装与调试将制备好的悬臂梁和传感层与检测电路等部件组装在一起,形成完整的微悬臂梁气体传感器。
随后,通过精密的调试和校准,使其达到预期的性能指标。
四、微悬臂梁气体传感器的优势1. 高灵敏度由于微悬臂梁的微小结构特性,使传感器对气体浓度具有较高的灵敏度,可以实现对于微小浓度变化的准确检测。
2. 快速响应微悬臂梁气体传感器在气体作用下能产生迅速的微小位移,使得传感器具有快速响应的特性,适用于对气体浓度快速变化的应用场景。
3. 稳定性高采用微纳制造工艺制备的微悬臂梁传感器具有结构紧凑、稳定性高的特点,能够长期稳定地工作在各种环境条件下。
五、微悬臂梁气体传感器的应用展望基于其优越的性能特点,微悬臂梁气体传感器在环境监测、医疗诊断、工业生产等领域具有广泛的应用前景。
表面应力对微悬臂梁传感器本征频率的影响1李凯,张青川†,伍小平中国科学技术大学,中科院材料力学行为和设计重点实验室,合肥 (230027)E-mail:zhangqc@摘要:在对微悬臂梁传感器本征频率的分析中,一般都忽略了表面应力的影响,由此计算出的吸附质量可能是不精确的。
为此,本文从表面应力和单位表面自由能的关系出发,把表面自由能算入微悬臂梁运动的总能量中,根据哈密顿原理推导出微悬臂梁运动的控制微分方程,得到了任意阶本征频率的解析解。
分析表明:表面应力对微悬臂梁传感器本征频率的影响是由表面弹性常数决定的,当表面应力与表面应变无关时,这种影响可以不考虑,但在一般情况下这种影响是不可忽略的。
关键词:表面应力, 表面自由能, 微悬臂梁, 本征频率1. 引言原子力显微镜[1]发明以来,微悬臂梁传感技术[2]得到了迅速的发展。
将微悬臂梁表面进行特殊的修饰处理之后,其可将特定的外部信号转化为自身的机械响应(图1),监测这种响应便可实现传感。
实验报道了此技术在温度探测[3],非制冷红外成像[4],化学气体检测[5],爆炸物监测[6],DNA双链杂交[7],抗原-抗体配对结合[8],蛋白质构象变化[9]等涉及物理,化学和生物领域中的应用。
微悬臂梁传感器工作的方式有两种,一种是静态的:检测传感过程中微悬臂梁产生的静态弯曲变形实现传感(图 1.a)。
另一种是动态的:检测传感过程中微悬臂梁振动的本征频率变化实现传感(图 1.b)。
相对于静态检测方式,动态检测方法无需对系统进行标定,抗噪声能力比较强。
实验已报道了用此方法可探测到10-18g量级的质量改变[10]。
在对动态检测方式的分析中,一般都不考虑表面应力对本征频率的影响,但也有报道[11]指出这种做法是不合适的。
有关这个问题的分析虽然不多,但其对于准确的解释现有的实验结果却是很重要的。
Chen等人[11]采用振弦模型进行分析:用一根两端固定的弦代替微悬臂梁,将表面应力等效为弦的张力,通过求解弦的运动来分析表面应力对本征频率的影响。
飞秒激光加工不锈钢微型悬臂梁的工艺研究王英;李玉华;王新林;廖常锐;陆培祥【摘要】为了研究飞秒激光对不锈钢材料的加工工艺,采用基于飞秒激光材料烧蚀的微细加工方法,深入研究了飞秒激光高效高质量微细加工不锈钢材料的工艺条件与参量优化,并应用于微型不锈钢悬臂梁的制作.分析了激光能量密度、激光扫描速度、重复扫描次数对加工形貌和蚀除速率的影响,制作出了高质量的微米量级的不锈钢微型悬臂梁.结果表明,飞秒激光微细加工是一种极具前途与极具柔性的微机电系统器件加工手段.【期刊名称】《激光技术》【年(卷),期】2010(034)003【总页数】4页(P347-350)【关键词】激光技术;飞秒激光;微加工;微型悬臂梁;参量优化【作者】王英;李玉华;王新林;廖常锐;陆培祥【作者单位】华中科技大学,光电子科学与工程学院,武汉光电国家实验室,武汉,430074;华中科技大学,光电子科学与工程学院,武汉光电国家实验室,武汉,430074;南华大学,电气工程学院,衡阳,421001;华中科技大学,光电子科学与工程学院,武汉光电国家实验室,武汉,430074;华中科技大学,光电子科学与工程学院,武汉光电国家实验室,武汉,430074【正文语种】中文【中图分类】TG665;TN249引言微型悬臂梁以其结构相对简单、应用广泛与高性能的特点成为了一种典型的微型传感与激励器件,在微机电系统(micro-electro-mechanical systems,MEMS)和微传感系统中被广泛使用。
在化学气体探测分析[1]、生化探测[2-4]以及其它一些精密分析测量领域[5]正受到越来越多的关注。
更小尺寸的微悬臂梁在灵敏度方面显露出了一定的优势[6],因此,微加工手段与加工工艺对提高微悬臂梁的性能有重要意义。
目前,制备微型悬臂梁大多以硅基材料或聚合物材料为主,而金属微型悬臂梁因其优良的导电性与机械、力学性能,在许多应用中会显示出更大的优越性[7-8]。
微悬臂梁气体传感器研究摘要:气体检测在人们生产生活中的应用十分广泛,特别是在安全生产方面, 气体传感器作为一大类对各种气体敏感的器件,能检测各种气体的成分和浓度,所以被广泛应用于诸多领域,微悬臂梁拥有其特有的优点,而且用它做成的传感器灵敏度非常高,使得微悬臂梁在制作微传感器方面得到了广泛的运用。
本文将就微悬臂梁气体传感器的目前发展状况、原理、制作工艺、弯曲测量方式和应用等几个方面进行分析。
关键词:悬臂梁气体传感器MEMS 压电谐振引言:气体检测在人们生产生活中的应用十分广泛,特别是在安全生产方面, 气体传感器作为一大类对各种气体敏感的器件,能检测各种气体的成分和浓度,所以被广泛应用于探测各种有毒有害气体,各种可燃性气体,温室效应气体和污染环境气体;检测和监控汽车尾气、工业废气探测与分析食品的气味和人的呼气以了解食品的新鲜度及人体的健康状况。
气体传感器直接关系到人们的生命财产安全。
目前MEMS气敏传感器分为硅微结构气敏传感器和硅基微结构气敏传感器两大类,包括MOSFET型、固体电解质型、金属氧化物型和谐振型等。
其中谐振式微梁传感器属于质量敏感传感器,其灵敏度极高,理论上最小检测质量可以达到1.4xlo一229[‘2〕,成为研究热点之一。
本文将就微悬臂梁气体传感器的墓前发展状况、原理、制作工艺、弯曲测量方式等几个方面进行分析。
正文:一、微悬臂梁气体传感器的发展1858年,人们最早发现在对薄片金属基底进行镀膜时,基底本身会被发生弯曲变形。
尽管这种由于分子在界面上的吸附而导致的基底变形现象很早就被发现,但在当时并为引起太多的注意。
直到1943年Norton在他申请的一份专利中提出:利用氢气在金属把表面的吸附效应来制造一种把/白金的双金属片氢传感器。
1969年Shaver用一根长100mm,宽5mm,厚125µm 的钯/银双金属悬臂梁进行了实验,证实了Norton的想法。
1979年美国橡树岭国家实验室的Taylor等人用这一方法对更多的气体进行了实验:他们用一根长100mm,单面镀有80nm金的镍材料悬臂梁研究了He,HZ,NH3,和HZS的吸附现象。
虽然陆续有实验对这种传感方法进行研究,但始终没有取得比较大的进展。
其主要原因在于:用来传感的悬臂梁尺寸受限于当时的制造工艺水平,不能做的很微小。
AFM微悬臂梁的制造工艺日趋成熟后,利用微悬臂梁作为传感器的报道也越来越多。
Itoh等人在微悬臂梁上镀上一层二氧化锌薄层,利用不同于光学读出的压电弯曲检测单元的传感器。
Cleveland等人报道了当在AFM探针的尖端上有微小粒子沉积时,可以探测在微梁上由于纳克变化所带来的共振频率的改变。
Thundat等人对此问题进行了研究,结果显示:当环境的温度、相对湿度发生变化时,微悬臂梁会产生相应的弯曲变形。
此外,当AFM处于动态的工作方式中时,环境的变化也会造成微悬臂梁的频移。
受此结果启发,Thundat等继续研究了汞蒸汽出现在环境中时微悬臂梁产生的频移。
自此以后,人们逐渐认识到,虽然在AFM的工作中这种“噪声”需要竭力避免,但在另一方面,它却可被当成一种灵敏的传感方法,这也正与之前Norton等人提出的想法相合。
于是,最初被用于AFM中的扫描探针成为了一种新型的传感器件。
接下来的几年内,Thundat【2】研究小组和IBM 的Lang研究小组以及UC Berkly的研究组对微悬臂梁作为传感器进行深入的研究,为这项技术的发展做出了巨大的贡献。
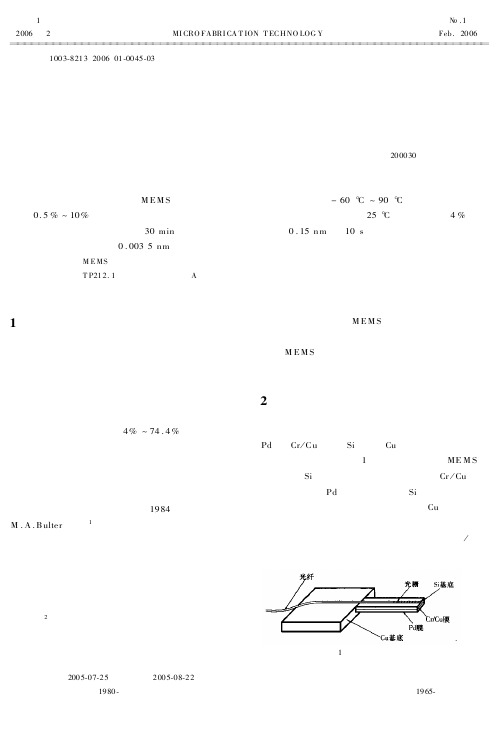
二、微悬臂梁气体传感器的机理;微悬臂梁气体传感器的基本结构是MEMS微悬臂梁。
微悬臂梁工作于谐振状态下,悬臂梁频率可用下式表示f=i式中f为第i阶谐振频率;L为悬臂梁长;A为悬臂梁截面积;E为悬臂梁材料杨氏模量; Ii为惯性矩;ρ为密度;λ为第i阶模态常数。
对于尺寸固定、材料性能稳定的微悬臂梁而言,其谐振频率主要与密度,即质量相关。
微悬臂梁气体传感器是在微悬臂梁表面通过IC光刻工艺涂覆可吸附气体分子的敏感层,常用材料为SnO2, TiO2, ZnO,掺杂聚酰亚胺、聚异丁烯等。
敏感层通过化学物理原理可以实现对某一类或某一种气体的吸附,吸附量同环境气体体积分数变化成线性关系。
微悬臂梁吸附气体分子,即改变了质量,谐振频率也随之发生改变。
通过检测谐振频率即可得知环境气体变化。
也可以通过测量其微小的弯曲量的改变来进行测量,从而可以得知空气内某种气体的含量。
三、微悬臂梁的设计和制作微悬臂梁利用PZT的压电效应,在交流电压的作用下产生动态变形,即谐振。
假设微悬臂梁在外加电压作用下产生的是纯弯曲,则其力学模型可以用下图表示。
在z 向均布载荷f 的作用下,微悬臂梁上的应力为()2,2x z L x fz Iσ-=微悬臂梁的变形方程可以表示为 ()()2226424fx L Lx x z x EI -+=式中L 为梁的长度;E 和I 则是梁的杨氏模量和截面惯性矩。
又根据压电材料的压电方程,在电场的作用下,PZT 层中产生的应力则可以表示为P d E σχ=+式中P 为极化强度;E 为电场强度;d 为压电应力系数(向量);χ为介电系数(向量)。
PZT 薄膜采用溶胶一凝胶旋涂而成,上下电极为Pt/X2.5Ti 制成。
微悬臂梁的尺寸为970拼mX30o 拌m 拜r 以。
微悬臂梁利用体微机械加工技术制作。
出了微悬臂梁制作的主要步骤。
首先双面热生长510:和LPCVDSi3N ‘层,它们是微悬臂梁的最底层的材料,同时也是下一步和第6步的掩蔽;第2步在背面的510:和Si3N;上形成图形,并用40环KOH 在50OC 下湿法腐蚀外露的Si 至一定深度;第3步是上下电极及压电层的形成,R/Ti 溅射后利用Lift 一off 技术形成上下电极图形,PZT 溶胶一凝胶旋涂后在HCI 和NH.F 混合溶液作用下湿法腐蚀形成图形;第4步利用PECVD 技术淀积一层510:,并形成梁上金表面和引线图形;第5步应用蒸发和Li 众一off 技术形成引线和金表面;第6步利用RIE 从背面干法刻蚀剩下的Si ,释放并形成微悬臂梁。
四、悬臂梁的弯曲测量测量悬臂梁的弯曲可以使用许多方法,包括光学、压阻、压电、电容和电子隧穿【4】等方法。
3.1 光学方法光学方法广泛用于在检测AFM的微悬臂梁弯曲变形的实验中,包括光学干涉、光学梁倾斜和光杠杆等技术。
其中光杠杆法是相对简单也是使用最普遍的悬臂梁弯曲探测方法,垂直分辨力可达到10-10m。
该方法的基本原理如图3-1-1所示,半导体激光器发出的激光束在微悬臂梁表面反射后进入光电位置敏感器(Position Sensitive Detector,PSD)的接收靶面,当微悬臂梁发生弯曲变形时,激光束随之发生的偏移,PSD将此偏移信息转化为相应的电信号输出,检测此输出信号即可实现对微悬臂梁变形的检测。
图3-1-1光杠杆测量微悬臂梁变形的示意图在微悬臂梁表面性质均匀的前提下,微悬臂梁的弯曲变形可用一个圆弧R来表示来描述。
假设微悬臂梁的长度为1,扰度为△Z,PSD上光束的偏移量为△S,光臂长为L,通过简单的几何分析,可得到以下关系:△Z=l*△s/4L根据对PSD的分辨率(小于0.1µm)以及典型的系统几何参数(l=200µm,L=40mm)的分析,该方法至少可探测出微悬臂梁端部0.Inm的变形值。
3.2 压阻法压阻效应是指半导体材料在应力作用下,禁带宽度发生变化,引起载流子的浓度和迁移率发生变化,从而使材料的电阻率发生变化。
在硅悬臂梁上的合适区域进行掺杂,悬臂梁弯曲的时候,会引起掺杂区的电阻变化,因此,可以通过掺杂区的电阻变化来表征悬臂梁的偏转。
目前,显示出较强的压阻效应的材料是掺杂的单晶硅。
悬臂梁上掺杂区的电阻变化可用惠斯通电桥来检测。
压阻法的优点是其信号读出电路可以和CMOS 工艺兼容,并且不受悬臂梁周围介质的影响。
压阻法的缺点是读出信号过程中有电流流过悬臂梁,导致悬臂梁发热而产生附加的悬臂梁弯曲和电阻变化。
另一方面压阻法无法应用在液体环境中。
3.3 压电法当晶体受到某固定方向外力的作用时,内部就会产生电极化现象,同时在某两个表面上产生符号相反的电荷;当外力撤去后,晶体又恢复到不带电的状态;当外力作用方向改变时,电荷的极性也随之改变;晶体受力所产生的电荷量与外力的大小成正比。
利用这种效应,在悬臂梁表面淀积压电材料(通常是ZnO),当悬臂梁弯曲时,在压电层就会产生感应电荷,感应电荷的多少就反映了悬臂梁的弯曲程度。
压电法的优缺点与压阻法的大致相同。
3.4 电容法电容法的测量原理是如果改变两块平行板之间的距离,则两块平行板之间的电容就会改变。
将悬臂梁作为可动的平行板,则悬臂梁弯曲的变化就可以通过电容的变化来表征。
3.5 电子隧穿方法电子隧穿己经应用于原子力显微镜测量微悬臂梁的弯曲。
当隧道尖端与微悬臂梁的距离在亚纳米量级时,在它们之间施加偏压V,会产生隧道电流。
这种方法具有非常高的灵敏度,能够测量出微悬臂梁端部10-4 nm的变形量,但是对设备要求非常高,现在应用很少。
学习微悬臂梁气体传感器后端检测电路的设计;结束语:本文主要从微悬臂梁气体传感器的发展、原理、制作以及其弯曲测量方法等方面进行阐述、分析,知道其原理是通过在悬臂梁上涂一层气体敏感材料,根据气体敏感材料对气体的吸附改变质量形成弯曲或民率等的变化来实现对某种气体的测量。
含气敏材料的气体传感器是MEMS工艺引出的新的气体检测方案。
该方法灵敏度高,结构简单可靠,功耗低,加工成本低,相比其他方法更易于小型化和集成化。
进一步提高检测的灵敏度和高通量检测应该是未来发展的核心。
参考文献【1】何道清,张禾和湛海云,传感器与传感技术,.北京:科学出版社,2008.;【2】周继明和江世明,传感技术与应用,长沙:中南大学出版社,2005.;【3】左伯莉,化学传感器原理与应用,北京:清华大学出版社,2007;【4】董永贵,传感技术与系统,北京:清华大学出版社,2006.;【5】李凯,博士毕业论文,合肥:中国科学技术大学,2006.;课程设计总结根据本篇论文的创作,对悬臂梁式气体传感器有了更加深入的了解,理解了微悬臂梁气体传感器的敏感机理,理解微悬臂梁传感器的工作原理,知道了微悬臂梁气体传感器的表面修饰技术和MEMS制备工艺,并掌握其制备工艺与测试技术。
这对以后的学习将会有很大的帮助,但是这篇论文对传感器的研究还很肤浅,希望在以后的学习工作中可以继续深入。
在此特感谢太惠玲老师对我完成论文的支持和帮助。