VxWorks基础知识
- 格式:ppt
- 大小:1.11 MB
- 文档页数:62
嵌入式实时操作系统VxWorks入门VxWorksVxWorks操作系统是美国WindRiver公司于1983年设计开发的一种嵌入式实时操作系统(RTOS),它以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
在美国的 F-16、FA-18 战斗机、B-2隐形轰炸机和爱国者导弹上,甚至连1997年4月在火星表面登陆的火星探测器上也使用到了VxWorks。
VxWorks原先对中国区禁止销售,自解禁以来,在我们的军事、通信、工业控制等领域得到了非常广泛的应用。
VxWorks的实时性体现在能于限定的时间内执行完所规定的功能,并能在限定的时间内对外部的异步事件作出响应。
因此,实时性系统主要应用于过程控制、数据采集、通信、多媒体信息处理等对时间敏感的场合。
本文将对这个操作系统进行一个入门级的、全面的介绍。
为力求展示其全貌,全文共分五章:(1)搭建VxWorks嵌入式开发环境;(2)简要介绍VxWorks的基本组成,内核的基本结构;(3)概述VxWorks板级支持包(BSP)的概念及VxWorks的启动过程;(4)介绍VxWorks设备驱动的架构及编写方法;(5)指明VxWorks应用开发的思路,任务调度及任务同步、中断与任务的同步机制。
以上各章中将贯穿着许多实例,由于本文定位于入门级教程,所以文中的实例都将十分简单。
下面我们进入第一章内容的讲解。
嵌入式系统的调试调试方法一般为通过PC(宿主机)上的集成开发环境交叉编译针对特定电路板(目标机)的程序,然后将程序通过目标板的JTAG、串口或网口等途径下载到目标板上运行。
因此,为了构造一个嵌入式系统的学习环境,拥有一块包含CPU、存储器及I/O 电路(构造计算机系统)的目标电路板往往是必要的。
虽然许多集成开发环境附带模拟软件,但仅限于指令集的模拟,均无法模拟物理的目标机硬件平台,因而在其上只能进行应用程序的象征性模拟开发。

1. 概述1.1 TORNADO 组件1.1.1 开发工具1.1.2 实时系统1.1.3 Tornado 文件目录1.2 硬件/软件配置1.3 booting介绍1.4 Tornado开始过程1.5 WDB 代理2 Projects2.1 bootable projects2.2 集成模拟器vxsim2.3 Downloadable projects 2.4 build说明3 WindSh 和Browser3.1 WindSh3.2 Browser4 CrossWind4.1 Debugging简介4.2 任务级Debugging 4.3 系统级DebuggingVxWorks 是美国Wind River System 公司(以下简称风河公司,即WRS 公司)推出的一个实时操作系统。
WRS 公司组建于1981年,是一个专门从事实时操作系统开发与生产的软件公司,该公司在实时操作系统领域被世界公认为是最具有领导作用的公司。
VxWorks 是一个运行在目标机上的高性能、可裁减的嵌入式实时操作系统。
它以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
在美国的F-16、FA-18 战斗机、B-2 隐形轰炸机和爱国者导弹上,甚至连1997年4月在火星表面登陆的火星探测器上也使用到了VxWorks。
1984年WRS 公司推出它的第一个版本--VxWorks 1.0.1,在1999年推出了它的最新版本VxWorks 5.4。
从1995年以后,WRS 公司推出了一套实时操作系统开发环境-- Tornado。
1.1 Tornado2.0 组件Tornado是嵌入式实时领域里最新一代的开发调试环境。
Tornado给嵌入式系统开发人员提供了一个不受目标机资源限制的超级开发和调试环境。
T ornado包含三个高度集成的部分:. 运行在宿主机和目标机上的强有力的交叉开发工具和实用程序;. 运行在目标机上的高性能、可裁剪的实时操作系统VxWorks;. 连接宿主机和目标机的多种通讯方式,如:以太网,串口线,ICE或ROM仿真器等。
vxWorks学习笔记vxWorks学习笔记2006-07-20 11:141.VxWorks开发方式:交叉开发,即将开发分为主机(host)和目标机(target)两部分。
类似于dos下C语言程序的开发。
合并开发的优点:简单缺点:资源消耗量大,CPU支持,非标准体系的支持host (Tornado) target(vxWork) 小程序模块vxWorks实际采用开发模式Tornado提供:编辑,编译,调试,性能分析工具,是vxWorks 的开发工具vxWorks:面向对象可以剪裁的实际运行操作系统2.vxWorks启动方式<1>Rom方式 (vxWork_rom)vxWorks直接烧入rom<2>Rom引导方式(bootrom+vxWorks)其中bootrom烧入rom,vxWorks可以通过从串口,网口,硬盘,flash等下载!这里的bootrom不是开发环境中的bootable,在开发环境里bootable指的是vxWorks,downloadable指application3.调试<1>attach用来在多任务调试时将调试对象绑定到某个任务<2>任务级调试(attach taskName)单个任务的调试不会影响到其他任务的运行,主要用来调用户的应用程序。
全局断点:在调另一任务或本任务时,系统运行本任务断点,则停下。
各任务要配合使用。
任务断点:调本任务时,系统运行到本任务断点,则停下。
如果没有attach到本任务,不起作用。
一次性断点:跑到一次之后自动删除。
<3>系统级调试(attach system)把所有task和系统core、中断看成一个整体,可用于调试系统和中断。
对中断调试,如果不是系统级调试,无论是那种断点都不起作用!wdbAgent不在调试范围内,当任务级调试时工作在中断方式,系统级调试工作在轮询方式。
!可是使用命令行方式的调试,参看crossWind教程。


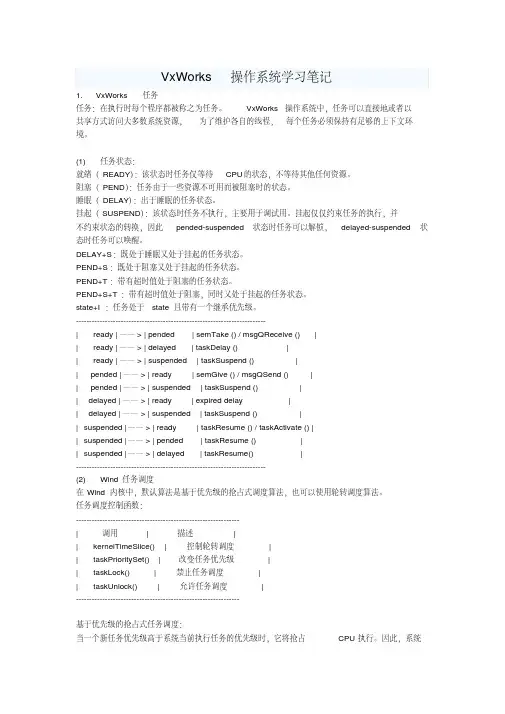
VxWorks 操作系统学习笔记1. VxWorks 任务任务:在执行时每个程序都被称之为任务。
VxWorks操作系统中,任务可以直接地或者以共享方式访问大多数系统资源,为了维护各自的线程,每个任务必须保持有足够的上下文环境。
(1) 任务状态:就绪(READY):该状态时任务仅等待CPU的状态,不等待其他任何资源。
阻塞(PEND):任务由于一些资源不可用而被阻塞时的状态。
睡眠(DELAY):出于睡眠的任务状态。
挂起(SUSPEND):该状态时任务不执行,主要用于调试用。
挂起仅仅约束任务的执行,并不约束状态的转换,因此pended-suspended状态时任务可以解锁,delayed-suspended状态时任务可以唤醒。
DELAY+S:既处于睡眠又处于挂起的任务状态。
PEND+S:既处于阻塞又处于挂起的任务状态。
PEND+T:带有超时值处于阻塞的任务状态。
PEND+S+T:带有超时值处于阻塞,同时又处于挂起的任务状态。
state+I:任务处于state且带有一个继承优先级。
------------------------------------------------------------------------| ready | ——> | pended | semTake () / msgQReceive () || ready | ——> | delayed | taskDelay () || ready | ——> | suspended | taskSuspend () || pended | ——> | ready | semGive () / msgQSend () || pended | ——> | suspended | taskSuspend () || delayed | ——> | ready | expired delay || delayed | ——> | suspended | taskSuspend () || suspended | ——> | ready | taskResume () / taskActivate () || suspended | ——> | pended | taskResume () || suspended | ——> | delayed | taskResume() |------------------------------------------------------------------------(2) Wind任务调度在Wind内核中,默认算法是基于优先级的抢占式调度算法,也可以使用轮转调度算法。
VxWorks基础知识收藏1.多任务:允许一个实时应用作为一系列独立任务来运行,各任务有各自的线程和系统资源。
3.任务切换之前要保存上下文。
4.优先级是动态的0~255,0级最高。
5.Wind内核taskLock()和taskUnlock()禁止和解除抢占,但对中断不起作用。
6.异常处理:VxWorks异常处理包,一般是将引起异常的任务休眠,保存任务在异常出错处的状态值。
内核和其它任务继续执行。
7.为什么要共享存储区:任务间通信的最简单的方法是采用共享存储区,也即相关的各个任务分享属于它们的地址空间的同一内存区域。
8. 为什么要互斥:当某一地址空间用于数据交换时,为了避免冲突,对于内存的锁定是非常重要的。
一般来说,关中断是最有效的解决互斥的方法。
但这对于实时应用来说,它阻止系统对外部事件的响应,无法满足实时性的要求。
同样,中断延迟也是不能接受。
因为它们没有实时性。
所以要用信号量来完成互斥,主要是二进制信号量,并且二进制信号量不仅能完成互斥而且能完成同步!,但是关中断应该用到程序的初始化过程中。
9.信号量:VxWorks信号量提供最快速的任务间通信机制,它主要用于解决任务间的互斥和同步。
针对不同类型的问题,有以下三种信号量:⊙二进制信号量使用最快捷、最广泛,主要用于同步或互斥;⊙互斥信号量主要用于优先级继承、安全删除和回溯;⊙计数器VxWorks还提供POSIX信号量和多处理器上信号量的应用。
10.消息队列,任务之间利用消息队列发送和接收消息。
11.管道:管道是一种灵活的消息传送机制,它比消息队列强在有一个select()12.信号量的创建与删除:semBCreate() 创建(产生并激活)一个二进制信号量semMCreate() 创建(产生并激活)一个互斥信号量semCCreate() 创建(产生并激活)制一个计数信号量semDelete() 中止并自由信号量semTake()获得信号量semGive() 给出信号量semFlush() 解锁所有正等待某一信号量的任务13.消息队列的创建与删除:msgQCreate() 创建(产生并激活)消息队列msgQDelete() 中止并自由信号量msgQSend() 向消息队列发送消息msgQReceive() 从消息队列接收消息14.网络通讯:与其它主机进行通信。

Vxworks学习资料整理Vxworks学习资料整理 (1)1 基于硬盘启动的Vxworks环境搭建 (3)2 Vxworks引导盘制作 (6)2.1 通过DOS加载VxWorks方法 (6)2.2 Bootrom三种类型 (7)2.3 VxWorks映象 (7)2.4 Bootrom.sys最快制作方法 (8)2.5 从网络引导 (8)2.6 从本地硬盘引导 (9)2.7 制作bootrom文件 (9)2.8 Bootrom编译步骤 (11)2.9 用BSP生成Bootable工程(即我们的程序文件) (12)2.10 FTP Server下载VxWorks (14)3 Tornado调试环境的建立 (17)3.1.1 配置文件config.h (17)3.1.2 网络连接 (18)6 从主机搭接(attach)到目标机 (21)7.1.3 串口连接 (21)4 4.Config.h文件注释说明 (22)4.1 启动行说明 #define DEFAULT_BOOT_LINE \: (22)4.2 Config.h 文件说明 (23)4.3 启动参数结构体 BOOT_PARAMS (35)4.4 booting过程介绍,比较详细 (39)5 sysClkRateGet();返回系统时钟每秒的tick数量, tick详解 (43)6 中断应用设计要点 (44)7 驱动程序设计 (49)8 缩短vxworks的启动时间 (52)9 调试篇 (55)10 驱动编程步骤 (55)10.1 将驱动程序增加到“系统驱动程序列表”中 (55)10.2 将设备增加到“系统设备列表”中 (55)10.3 打开设备,得到文件描述符 (55)10.4 SELECT机制的使用 (56)10.4.1 select( )函数翻译 (58)11 VxWorks系统的网络驱动(END) (60)12 VXworks操作系统中信号量用于多任务同步与互斥的讨论 (62)12.1 二进制信号量实现互斥和同步 (64)12.1.1 互斥的实现: (64)12.1.2 同步的实现: (65)12.2 互斥信号量 (67)13 Tornado的文件目说明录 (68)14 Shell 内置命令说明 (72)14.1 任务管理 (72)14.2 任务状态信息 (72)14.3 系统修改和调试 (73)14.4 对象命令( WindSh Commands for Object Display ) (73)14.5 WindShell and Browser, Shell 命令 (74)15 驱动篇 (82)16 中断篇 (83)16.1 中断服务程序ISR编写注意事项 (83)16.2 中断号与中断向量的转换 (84)16.3 安装中断服务程序 intConnect() (84)16.4 调试中断服务程序方法 (84)17mkboot批处理命令详细解释 (84)18 MakeFile 说明 (86)19 VxWorks5.4中的输入输出重定向 (89)19.1 vxworks屏幕输出, 一般来说用printf都是串口/shell输出,串口输出就可以到屏幕上了? (89)19.2 20.2 VxWorks中针对X86开发时标准输入输出的重定向? (90)20 怎样加入外部.o文件? (93)21 如何在Vxworks中使用 cd ,pwd , ls 命令:启用File System and Disk Utilities 组件(INCLUDE_DISK_UTIL),可在shell下用pwd/cd/ls等命令 (94)22 Error: image is larger than 524288 bytes (94)23 proxyArpDefaultOn()未定义解决方法? (95)24 如何将VxWorks的系统定时间隔或系统Ticks设置为1ms (95)25 read/write、fread/fwrite、fopen/open有什么区别 (96)26 快速启动 (100)27 启动时报ATA0a和硬盘启动相关问题 (100)28 如何安装USB2.2新版本及编译USB驱动? (101)29 WindML、图形界面相关问题 (102)29.1 WindML,ugldemo出错? (102)29.2 5101 VxWorks黑屏问题? (102)29.3 添加ugldemo.c后,编译报undefined reference to “ugltextdraw”错误一大堆? (103)29.4 WindML 中文字库显示? (103)30 VxWork6.8相关问题 (105)30.1 ELF和bin文件的区别? (105)30.2 diab和GNU的区别? (106)31 No such file or directory错误? (108)专业术语:WTX协议:(Wind River Tool eXchange): 用于开发机内部Tornado工具与Target Server 之间通信.WDB协议:(Wind DeBug): 用于主机Target Server与目标机之间的通信.1基于硬盘启动的Vxworks环境搭建VxWorks操作系统是美国WindRiver公司于1983年设计开发的一种嵌入式实时操作系统(RTOS)。
VxWorks 5.5开发指南学习笔记第一章VxWorks概述1.绪论VxWorks是一种嵌入式的实时操作系统,所谓嵌入式操作系统就是我们自己设计开发一块可以实现某种功能的板子,一般的功能板上都有一个cpu,嵌入式实施操作系统就是运行于这个cpu之上,使我们能够在板子上作相应得软件开发实现板子功能。
VxWorks支持32位的CPU,包括Intel公司的x86、Motorola公司的68k 和PowerPC、MIPS、ARM、Intel公司的i960、Hitachi公司的SH。
我们设计的这块板子通常没有软件的自开发能力,所以我们需要一台通用机来辅助开发,这台通用机可以是PC或工作站,我们称辅助我们软件开发的通用机为宿主机(Host),用户自己开发的板子为目标机(Target)。
宿主机上要有一个集成开发环境(IDE)来辅助我们的软件开发,这套集成开发环境可以运行在Windows95/NT 或 UNIX下,包括交叉编译器(Cross Compiler)和交叉调试器(Cross Debugger),所谓交叉编译器就是在宿主机上编译生成可以在目标机上运行的代码IMAGE,交叉调试器就是通过宿主机和目标机之间的某种耦合方式实现前后台调试。
我们称宿主机上的这套集成开发环境为Tornado,编译生成的目标机上的可执行代码IMAGE为VxWorks。
在系统安装的时候,集成调试环境和VxWorks的原材料(一些obj文件)都安装到宿主机上,编译生成的在目标机上运行的IMAGE内包含操作系统。
下面我们分别来介绍这两部分内容。
1.1IMAGE of VxWorks1.IMAGE的结构IMAGE可以分为三个层次四个部分,最底层是BSP,中间层是VxWorks其中包含WindKernel 和components两部分,最高层是应用实现层app。
1)BSPBSP是系统用来管理外设的部分,由两部分组成:初始化、驱动程序。
所谓初始化是指从系统上电复位开始直到wind kernel和usrRoot根任务启动的这段时间系统的执行过程。
vxworks7编程指南摘要:1.VxWorks7 简介2.VxWorks7 编程基础3.VxWorks7 编程进阶4.VxWorks7 编程实例5.VxWorks7 编程总结正文:【VxWorks7 简介】VxWorks7 是一款实时操作系统(RTOS),广泛应用于各种实时控制系统和嵌入式系统中。
其强大的功能和良好的性能使其成为众多开发者的首选。
本指南将为您提供VxWorks7 编程的基本知识和进阶技巧。
【VxWorks7 编程基础】在开始VxWorks7 编程之前,您需要了解一些基本概念。
首先,VxWorks7 的任务调度采用优先级调度策略,任务根据优先级分为不同等级。
此外,VxWorks7 还提供了丰富的同步和通信机制,如信号量、互斥锁和消息队列等,以确保实时性能和系统稳定性。
【VxWorks7 编程进阶】在熟悉基本概念后,您可以深入学习VxWorks7 的编程技巧。
本节将介绍如何使用VxWorks7 提供的API 进行任务管理、内存管理和设备驱动等操作。
此外,还将学习如何调试和优化VxWorks7 应用程序,以提高系统性能。
【VxWorks7 编程实例】为了帮助您更好地理解和应用VxWorks7 编程知识,本节将通过一个实际案例进行讲解。
实例为一个简单的嵌入式控制系统,包括一个主任务和两个子任务。
主任务负责接收用户输入,子任务分别负责控制两个电机。
通过这个实例,您将了解如何编写和调度VxWorks7 任务,以及如何使用同步和通信机制实现任务间的协作。
【VxWorks7 编程总结】在本指南中,我们为您介绍了VxWorks7 编程的基本知识和进阶技巧。
通过学习,您应该已经掌握了如何在VxWorks7 环境下编写实时应用程序,并了解了如何使用同步和通信机制实现任务间的协作。
VxWorks操作系统基础1 实时操作系统概述31.1 实时操作系统31.2 基本概念32 VxWorks的系统综述42.1 VxWorks 42.2 Tornado 63 VxWorks操作系统基础73.1 VxWorks的任务73.1.1 多任务73.1.2 任务的状态迁移83.1.3 Wind内核的任务调度93.1.4 任务控制93.1.5 任务扩展性123.1.6 任务错误状态:errno 133.1.7 任务异常处理143.1.8 共享代码和代码重入143.1.9 VxWorks的系统任务173.2 任务间通信183.2.1 共享数据结构183.2.2 互斥183.2.3 信号量Semaphores 193.2.3.1 二值信号量203.2.3.2 互斥信号量223.2.3.3 计数信号量233.2.3.4 信号量的特殊参数243.2.4 消息队列243.2.5 管道263.2.6 跨网络的任务间通信263.2.7 信号263.3 中断服务代码273.3.1 应用代码与中断连接273.3.2 中断堆栈283.3.3 ISRs的一些特殊限制283.3.4 中断级别的异常283.3.5 保持高中断级别293.3.6 对高中断级别的ISRs的一些附加限制29 3.3.7 中断与任务间的通信293.4 看门狗计时器Watchdog Timers 294 VxWorks中的函数库:304.1 TaskLib: 304.2 ErrnoLib: 304.3 SigLib: 314.4 LstLib: 314.5 MemLib: 321 实时操作系统概述1.1实时操作系统在计算的早期开发的操作系统的最原始的结构形式是一个统一的实体(monolithic)。
在这样的系统中,提供的不同功能的模块,如处理器管理、内存管理、输入输出等,通常是独立的。
他们在执行过程中并不考虑其他正在使用中的模块,各个模块都以相同的时间粒度运行,即严格按时间片分时方式运行。