图!系统的硬件总体结构框图
- 格式:pdf
- 大小:113.95 KB
- 文档页数:3
PLC的硬件系统组成PLC的构成框图和计算机是一样的,都由中央处理器(CPU)、存贮器和输入/输出接口等构成。
因此,从硬件结构来说,可编程控制器实际上就是计算机,图1是其硬件系统的简化框图。
从图中可以看出PLC内部主要部件有:(1)CPU(Central Process Unit)CPU是PLC的核心组成部分,与通用微机的CPU一样,它在PLC系统中的作用类似于人体的神经中枢,故称为“电脑”。
其功能是:a、按PLC中系统程序赋予的功能,•接收并存储从编程器输入的用户程序和数据。
b、用扫描方式接收现场输入装置的状态式数据,并存入映象寄存器或数据寄存器中。
c、诊断电源、PLC内部电路的工作状态和编程过程中的语法错误。
d、在PLC进入运行状态后,从存储器中逐条读取用户程序,经过命令解释后按指令规定的任务,产生相应的信号,去启闭有关控制门电路。
分时分渠道地去执行数据的存取、传送、组合、比较和变换等操作,完成用户程序中规定的逻辑式算术运算等任务。
根据运算结果,更新有关标志位的状态和输出映象寄存器的内容,再由输出映象寄存器的位状态式数据寄存器的有关内容,实现输出控制、制表、打印式数据通讯等。
PLC常用的CPU主要采用通用微处理器、单片机或双极型位片式微处理器。
通用的微处理器常用的是8位机和16位机,如Z80A、8085、8086、6502、M6800、M6809、M68000等。
单片机常用的有8039、8049、8031、8051等。
双极型位片式微处理器常用的有AMD2900、AMD2903等。
①用通用微处理器作CPU在低档PLC中,用Z80A做CPU较为普遍,Z80A用于PLC有如下长处:Z80(或Z80A)CPU及其配套的芯片廉价、普及、通用,用这套芯片制成的PC,给维修及推广普及带来方便。
Z80有独立的输入/输出指令,而且指令格式较短,•执行时间也较短,这样有利于扫描周期的缩短。
Z80输入/输出指令格式较短,相应的输入/输出设备编码也较短,所以相应的译码硬件器较简单。
Equipment Manufacturing Technology No.2,2021摘要:针对中小学生设计智能坐垫,采用分布式压力传感器,在对用尸的压力数据进行预处理之后,应用提前训练好的模型,对用户的坐姿进行识别来进行坐姿监测,并通过报警系统实时提出警告,使用户使用正确的坐姿以免造成颈椎 腰椎问题,实现非静态生活方式关键词:智能坐垫;压力传感器;坐姿监测中图分类号:TH 122文献标识码:A文章编号:1672-545X ( 2021 )02-0128-03〇引言当今社会中小学生学习任务重,作业多,由于久 坐和坐姿不正确造成的视力下降、脊柱弯曲等疾病 使得家长非常焦虑,但是针对学生使用的产品却较 少。
现有座椅有改善久坐舒适度和按摩等功能,而没 有帮助学生改善其作息时间,提醒坐姿不正确的产 品。
因此,本智能坐垫结合坐姿识別功能来对用户的 坐姿、学习时长等进行监测。
若用户长时间久坐,或 者长时间保持不健康的姿势,坐垫会提醒用户,使用 户调整坐姿或适当休息,久坐时长提醒可由用户自 己自行设定。
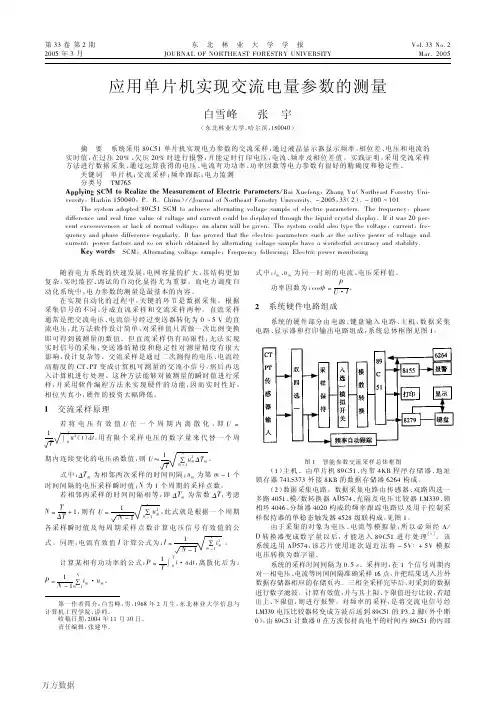
传感器图1系统结构框图2传感器的选择1系统总体设计整个硬件系统由C 8051F 341单片机作为主控中 心,控制各种电路完成数据采集与传输。
传感器将压 力信号转换成电信号,由于系统有多个传感器进行 数据采集,通过数据选择器进行数据选择,被选择的 数据放大后再通过A /D 转换电路将模拟信号转换为 数字信号,然后通过数据传输电路送人单片机进行 信息处理,根据处理的数据对使用者进行提醒。
结构 框图如图1所示。
力传感器有很多种,比如有半导体应变片压力 传感器、电阻应变片压力传感器、电感式压力传感 器、压阻式压力传感器、电容式压力传感器等,每种 传感器的材料、形状、原理等各不相同。
由于要以坐 垫为感知层,所以必须使用足够大可形变的薄膜压 力传感器因此我们选择了 IMM -00039系列分布式 多点式压力感应电阻式传感器。
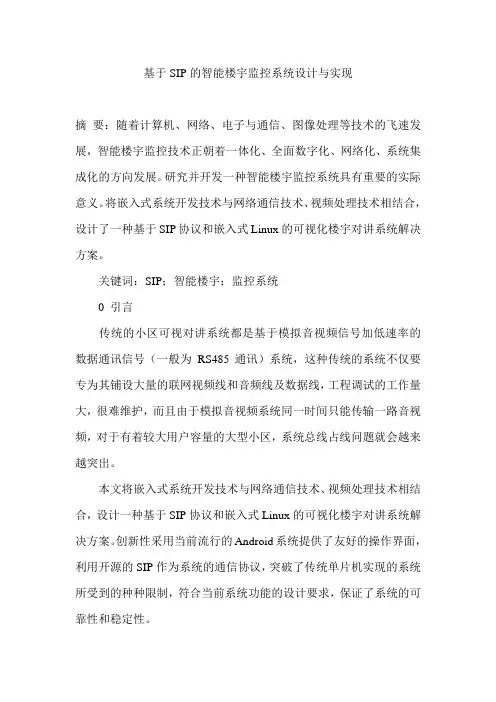
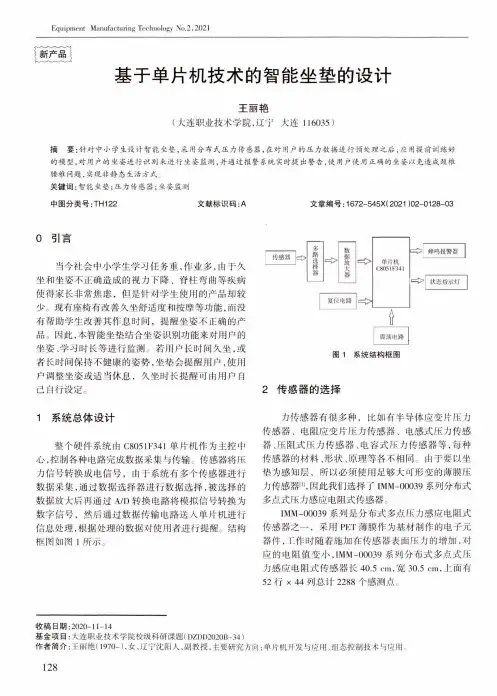
基于SIP的智能楼宇监控系统设计与实现摘要:随着计算机、网络、电子与通信、图像处理等技术的飞速发展,智能楼宇监控技术正朝着一体化、全面数字化、网络化、系统集成化的方向发展。
研究并开发一种智能楼宇监控系统具有重要的实际意义。
将嵌入式系统开发技术与网络通信技术、视频处理技术相结合,设计了一种基于SIP协议和嵌入式Linux的可视化楼宇对讲系统解决方案。
关键词:SIP;智能楼宇;监控系统0 引言传统的小区可视对讲系统都是基于模拟音视频信号加低速率的数据通讯信号(一般为RS485通讯)系统,这种传统的系统不仅要专为其铺设大量的联网视频线和音频线及数据线,工程调试的工作量大,很难维护,而且由于模拟音视频系统同一时间只能传输一路音视频,对于有着较大用户容量的大型小区,系统总线占线问题就会越来越突出。
本文将嵌入式系统开发技术与网络通信技术、视频处理技术相结合,设计一种基于SIP协议和嵌入式Linux的可视化楼宇对讲系统解决方案。
创新性采用当前流行的Android系统提供了友好的操作界面,利用开源的SIP作为系统的通信协议,突破了传统单片机实现的系统所受到的种种限制,符合当前系统功能的设计要求,保证了系统的可靠性和稳定性。
1 系统设计1.1 系统平台介绍系统采用三星S5PV210为硬件平台,S5PV210是三星推出的一款适用于智能手机和平板电脑等多媒体设备的应用处理器。
S5PV210采用了ARM CortexTMA8内核,ARM V7指令集,主频可达1GHz,64/32位内部总线结构,32/32KB的数据/指令一级缓存,512KB的二级缓存,可以实现2 000DMIPS(每秒运算2亿条指令集)的高性能运算能力。
包含很多强大的硬件编解码功能,内建MFC(Multi Format Codec),支持MPEG1/2/4、H.263、H.264等格式视频的编解码,支持模拟/数字TV输出,能很好地支持监控视频图像的传输处理。
基于TMS320F28035的永磁同步电机矢量控制系统研究赵森;李迪;王世勇【摘要】基于实现永磁同步电机伺服系统矢量控制,得到良好的系统动态响应的目的,采用以TMS320F28035为控制核心的全数字DSP速度控制方案,通过硬、软件设计、参数整定以及波形图分析,实验结果表明,该系统电流跟踪性能提升10%,稳态精度提升15%.【期刊名称】《电子设计工程》【年(卷),期】2014(022)024【总页数】4页(P120-123)【关键词】永磁同步电机;TMS320F28035;矢量控制系统;速度控制【作者】赵森;李迪;王世勇【作者单位】华南理工大学机械与汽车工程学院,广东广州510640;华南理工大学机械与汽车工程学院,广东广州510640;华南理工大学机械与汽车工程学院,广东广州510640【正文语种】中文【中图分类】TN492永磁同步电动机(PMSM)具有体积小、重量轻、结构多样、可靠性高等优点。
在数控机床、工业机器人等自动化领域得到了广泛的应用。
数字化交流伺服调速系统采用的是目前非常流行的矢量控制算法,即电压空间矢量脉宽调制[1](SVPWM)。
SVPWM的主要思想是:以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成脉宽调制(PWM)波,以所形成的实际磁链矢量来追踪其准确磁链圆[2]。
由于矢量控制算法对采集PMSM转子的电流、电压等参数的实时性要求很高,且计算量大,一般的微处理器很难达到要求。
因此,文中采用TI公司C2000系列高压数字电机开发套件,利用其DSP芯片TMS320F28035高速数据处理能力,使得整个电机控制系统具有控制精度高,实时性强的特点。
1 系统结构针对永磁同步电机高阶、多变量、非线性、强耦合的控制特点,如何有效解耦进而实现直流电机般的转矩控制方式,一直以来都是主要的研究热点。
永磁同步电机的转子机械位置和磁通位置的一致性,决定了其实现矢量控制方面的优越性。
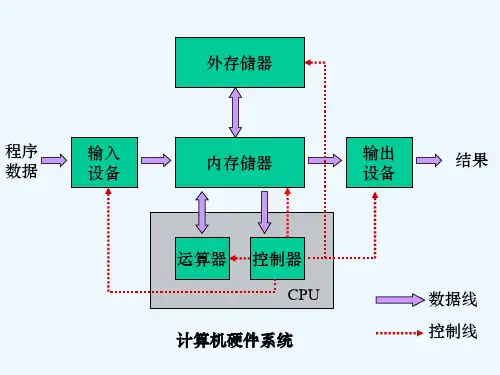
计算机硬件基本结构树状图计算机硬件基本结构计算机的5个基本组成部分:运算器、控制器、存储器、输入设备和输出设备。
算术逻辑部件P46 、P731.运算器寄存器P46 、P72随机存取存储器RAM P74内存储器(又称为只读存储器ROM P75主存储器或内存或互补金属氧化物半导体CMOS P76主存)1.44MB31/2英寸软盘P94软盘Zip盘P94大容量软盘超级盘P942.存储器HiFD盘P94内置硬盘P95盒式硬盘P95外存储器硬盘硬盘组P95(又称为辅USB移动硬盘P95助存储器光盘-只读存储器CD-ROM或外存或光盘CD 写一次,读多次光盘CD-R(又称为WORM)辅存)P97可写光盘CD-RW光盘数字化视频光盘-只读存储器DVD-ROM数字化视频光盘DVD DVD-RP97DVD-RAM和DVD-RW磁盘P98程序计数器PC P47指令寄存器IR P473.控制器指令译码器ID P47时序控制电路P47微操作控制电路P47传统设计键盘P80键盘轮廓设计键盘P80键盘输入无处理能力终端P81智能型终端P81终端网络终端P81Internet终端P81鼠标P82游戏杆P82触摸屏P82定点输入设备光笔P82数字转换器P834.输入设备数码相机P83平台式扫描仪P83图像扫描仪手持式扫描仪P83扫描输入设备传真机P84条形码阅读器P85磁墨水字符识别MICR P85字符和标记识别设备光学字符识别OCR P85 光学标记识别OMR P85 语音输入设备P86 数字笔记本P88其他输入设备视觉系统P88标准P89显示器阴极射线管P89平面显示器P89高清晰度电视机P90喷墨打印机P91非接触式打印机激光打印机P91 热学打印机P91打印机点针打印机P31接触式打印机菊花轮打印机P31 5.输出设备行式打印机P31笔式绘图仪P92喷墨绘图仪P92绘图仪静电绘图仪P92直接成像绘图仪P92缩微输出设备P93其他输出设备语音输出设备P93。
• 196•智能小车寻迹避障系统采用STM32F103C8T6芯片做为控制器。
系统包括轨迹识别模块电路、障碍物识别模块电路、直流电机驱动模块电路、单片机最小系统等电路。
各个模块采集到的信息输送至STM32控制器,由控制器负责处理、分析采集到的数据,得到结果后,通过控制L298N 电机驱动模块控制电机输出转速,改变车辆移动状态。
引言:近年来,随着自动化技术的发展及成熟,越来越多的领域开始引入自动化技术,智能寻迹避障小车因其可以实现无人操作而得到广泛应用,对其的研究更是有有较高的应用价值,也同样具有现实意义。
基于STM32的智能小车寻迹避障系统硬件设计的研究重点包括小车的智能寻迹电路设计,复杂环境下的避障和自动扫描路径电路设计等。
系统采用STM32F103C8T6芯片做为控制器,负责处理、分析采集到的数据,得到结果后通过控制L298N 电机驱动间接改变车辆移动状态,通过线性CCD 镜头寻找轨迹,通过对返回数据进行处理分析,从而实现复杂路线的行驶。
国内外现状:现如今国内的自动化技术发展极快,无人科技方面有极大的发展空间,自动寻迹避障车更是有极大的应用范围,小到餐饮服务业,大到太空勘探,都可将其应用其中,大大提高了工作效率,节约人工成本,在国外自动寻迹避障小车已有实际的应用,相信在不久的将来会被广泛普及。
小车的图片如图8所示。
智能避障小车的控制流程:小车会在黑白线的规划下沿着黑线行驶,当路线中遇到障碍物的时候,小车会自动停车,当障碍物移除小车会继续沿着障碍物行驶。
图一 小车遇到障碍物 图二 障碍物移除1.系统总体结构系统设计目标是小车能自动延黑色轨迹延轨迹移动,遇到障碍物时停止,在障碍物离开后继续延轨迹行走。
智能小车在行驶过程中能够判断黑色轨迹和障碍物位置。
智能小车寻迹避障系统结构框图如图2所示。
系统由单片机模块、轨道识别模块、障碍物识别模块、直流电动机驱动模块等构成。
单片机采用STM32F103C8T6芯片做为控制器;轨道识别模块采用TSL1401线性CCD 传感器,用于采集轨迹信息;障碍物识别模块采用E18-B03N1漫反射式光电开关,用于采集障碍物位置信息;直流电动机驱动块模块采用L298N电机驱动模块,用于小车前进方向和速度的控制。
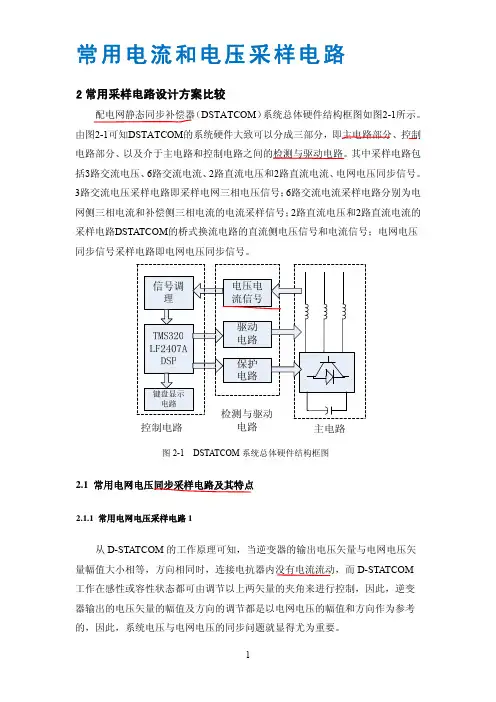
配电网静态同步补偿器(DSTATCOM )系统总体硬件结构框图如图2-1所示。
由图2-1可知DSTATCOM 的系统硬件大致可以分成三部分,即主电路部分、控制电路部分、以及介于主电路和控制电路之间的检测与驱动电路。
其中采样电路包括3路交流电压、6路交流电流、2路直流电压和2路直流电流、电网电压同步信号。
3路交流电压采样电路即采样电网三相电压信号;6路交流电流采样电路分别为电网侧三相电流和补偿侧三相电流的电流采样信号;2路直流电压和2路直流电流的采样电路DSTATCOM 的桥式换流电路的直流侧电压信号和电流信号;电网电压同步信号采样电路即电网电压同步信号。
图2-1 DSTATCOM 系统总体硬件结构框图2.2.11 常用电网电压同步采样电路及其特点.1 常用电网电压采样电路1从D-STATCOM 的工作原理可知,当逆变器的输出电压矢量与电网电压矢量幅值大小相等,方向相同时,连接电抗器内没有电流流动,而D-STATCOM 工作在感性或容性状态都可由调节以上两矢量的夹角来进行控制,因此,逆变器输出的电压矢量的幅值及方向的调节都是以电网电压的幅值和方向作为参考的,因此,系统电压与电网电压的同步问题就显得尤为重要。
常用电流和电压采样电路2常用采样电路设计方案比较图2-2 同步信号产生电路1从图2-2所示同步电路由三部分组成,第一部分是由电阻、电容组成的RC 滤波环节,为减小系统与电网的相位误差,该滤波环节的时间常数应远小于系统的输出频率,即该误差可忽略不计。
其中R 5=1K Ω,5pF,则时间常数错误!未因此符合设计要求;第二部分由电压比较器LM311构成,实现过零比较;第三部分为上拉箝位电路,之后再经过两个非门,以增强驱动能力,满足TMS320LF2407的输入信号要求。
C 4=1找到引用源。
<<l ms,[1]2.1电网电压采样电路2.2 常用常用电网电压同步信号采样电路2如图2-3所示。
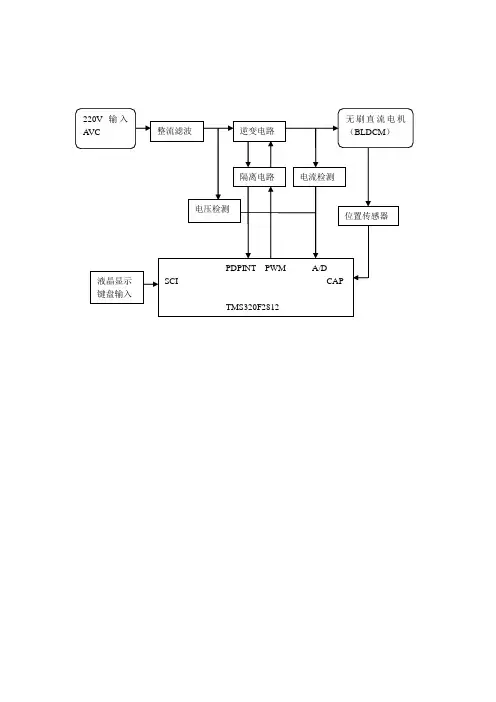
220V交流电经过一个三相整流桥,成为直流电压。
在经过滤波电路和稳压电路之后,成为可以供给智能功率模块的较为稳定的直流电压源。
在接入智能功率模块之前,首先串连一个电流霍尔传感器,测量直流母线电流,送给DSP的I/O口,用于母线过流保护;并联一个电压霍尔传感器,测量直流母线电压,送给DSP的I/O口,用于母线过压保护。
DSP负责处理采集到的数据和发送控制命令。
DSP通过I/O口捕捉电机转子位置传感器上的脉冲信号,判断转子位置,输出合适的驱动逻辑电平给驱动芯片,再由功率驱动电路驱动电机旋转。
TMS320F2812DSP控制器本课题选用TMS320F2812DSP芯片。
TMS320F2812数字信号处理器是TI公司最新推出的32位定点DSP,是目前控制领域最先进的处理器之一。
其频率高达150MHz,大大提高了控制系统的控制精度和芯片处理能力。
TMS320F2812芯片基于C/C++高效32位TMS320F28XDSP内核,并提供浮点数学函数库,从而可以在定点处理器上方便地实现浮点运算。
TMS320F2812芯片的功能模块框图如图所示。
主要特性如下:(1)数据处理能力强。
系统时钟频率可达150MHz(时钟周期可达6.67ns)。
另外TMS320F2812采用了先进的改进型哈佛结构,拥有八级流水线,专用的指令集和统一的寄存器编程模式;(2)存储空间大。
具有32位的数据地址和22位的程序地址,总地址空间可达4M的数据空间和4M的程序空间。
片内存储器包括128Kx16位的Flash存储器和18K×16位RAM;(3)外围设备电路完善。
具有外部存储器接口,三个32位的定时器,56个独立可编程GPIO,串行外接口SPI,两个标准的串行通信接口SCI,改进的局域网络ECAN,多通道缓冲串行接口MCBSP和串行外围接口模式,另外还有两个事件管理器模块EV A和EVB,每个包括:16位通用定时器;8个16位的脉宽调匍J(PWM)通道。
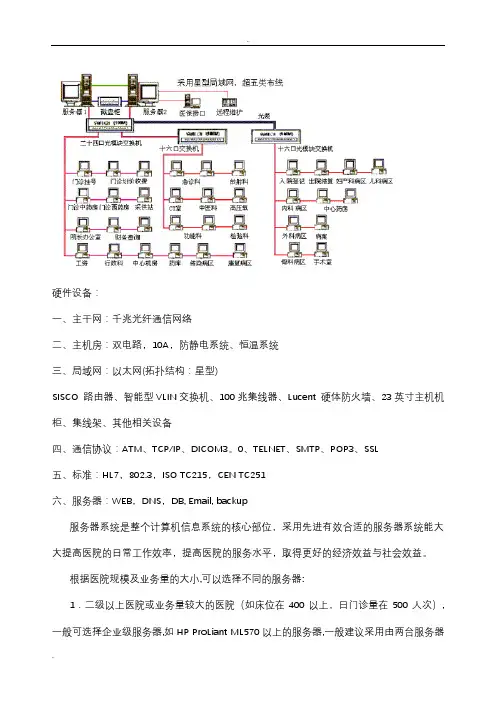
H I S系统结构图-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN硬件设备:一、主干网:千兆光纤通信网络二、主机房:双电路,10A,防静电系统、恒温系统三、局域网:以太网(拓扑结构:星型)SISCO 路由器、智能型VLIN交换机、100兆集线器、Lucent 硬体防火墙、23英寸主机机柜、集线架、其他相关设备四、通信协议:ATM、TCP/IP、DICOM3。
0、TELNET、SMTP、POP3、SSL五、标准:HL7,802.3,ISO TC215,CEN TC251六、服务器:WEB,DNS,DB, Email, backup服务器系统是整个计算机信息系统的核心部位,采用先进有效合适的服务器系统能大大提高医院的日常工作效率,提高医院的服务水平,取得更好的经济效益与社会效益。
根据医院规模及业务量的大小,可以选择不同的服务器:1.二级以上医院或业务量较大的医院(如床位在400以上,日门诊量在500人次),一般可选择企业级服务器,如HP ProLiant ML570以上的服务器,一般建议采用由两台服务器加磁盘阵列组成一个集群。
部分较大的医院及业务量较大切医院经济效益较好的医院也可选择小型机或顶级PC-SERVER(如HP ProLiant DL760)等。
2.一般二级医院或业务量较小的(如床位在200左右,日门诊量在400人次左右),一般可选择如HP ProLiant ML530,可根据医院实际需要是否组成集群。
3.一般中心卫生院等一级医院,可选择,如HP ProLiant ML330G2/ ML350G2等服务器服务器通常配置:支持2个P4 CPU(2.4G)512M 内存, 10+ 存储托架,最大热插拔硬盘容量620GB,8MB SDRM显存七、操作系统系统(可选): Win2000八、存储方式: 短期:磁盘阵列长期:磁带库、刻录光盘数据备份是当前HIS数据容错措施的主要手段之一,在具体操作中,可将数据备份在刻录光盘、复制磁带的方式,这是医院确保数据安全性、一致性和灾难恢复的重要措施。
基于ARM的图像采集系统的硬件设计与实现刘永林;程耀瑜;梁莹;雷红淼【摘要】传统图像采集系统具有复杂、体积大、不便携带等缺点,而嵌入式图像采集系统集图像采集、显示、处理于一体,具有体积小、功耗低的优点.针对安防监控系统的需要,设计出一种基于ARM的图像采集系统.该系统以S3C2410(ARM9)为核心,利用USB摄像头、显示屏和存储器来构建图像采集和处理系统,并搭建必要的外围电路和通信接口,完成了硬件平台的设计.然后移植嵌入式操作系统和驱动程序,最终实现了图像数据的采集、显示和存储等功能,采集图像清晰,符合系统要求.【期刊名称】《电子测试》【年(卷),期】2011(000)006【总页数】4页(P12-15)【关键词】嵌入式;ARM;S3C2410;图像采集;USB摄像头【作者】刘永林;程耀瑜;梁莹;雷红淼【作者单位】中北大学山西省现代无损检测工程技术研究中心,山西太原030051;中北大学山西省现代无损检测工程技术研究中心,山西太原030051;中北大学山西省光电信息与仪器工程技术研究中心,山西太原030051;中北大学山西省现代无损检测工程技术研究中心,山西太原030051【正文语种】中文【中图分类】TP30 引言现代社会中,安全监测和防护系统在人们的生活、人身和财产安全等方面扮演着越来越重要的作用。
图像的获取和保存是现代安监防护系统最直接、最有效,同时也是最可靠的方式和手段。
俗话说“百闻不如一见”,图像往往含有大量的信息,远比语言和文字携带信息量大,而且一目了然,通俗易懂。
因此基于图像的安防系统是现代安防系统发展的趋势,被广泛地应用于社会生活中。
针对这种现状,本文设计出一种基于ARM处理器的嵌入式图像采集和存储系统,与传统PC图采集系统体积大、处理速度慢、不宜便携的缺点相比,本系统稳定可靠、轻小便携、成本低廉,且具有速度快、功耗低等优点,具有很强的现实意义和广泛的应用前景。
1 系统总体设计目前,对图像信息采集和处理主要有两种方式:一是利用CCD相机和图像采集卡,将模拟信号转换成数字信号,利用总线传送到上位机进行处理。
西安郵電學院测控仪器课程设计报告书系部名称:自动化学院学生姓名:专业名称:测控技术与仪器班级:测控08042011年9月19日至时间:2011 年9月30日小车智能自动避障系统一、设计要求:以红外传感器ST188或ST178作为小车的测距传感器,进行障碍物探测。
当发现障碍物时,给出报警信号,自动适当改变行进方向继续前行。
二、设计方案分析2.1 方案设计:该系统中我们设计一个小车,以STC89C52单片机为主控制芯片,由L298N 芯片控制直流电机转动从而使小车向前跑动;通过一个红外传感器ST188实现小车自动检测障碍物。
系统中主控制器的多个I/O口作为通用I/O口分别连接L298N输出控制信号、ST188输入信号,蜂鸣器报警。
系统硬件总体设计框图如图1所示。
图 1 系统硬件框图2.2背景知识介绍:2.2.1主控制器介绍:80C51单片机是把那些作为控制应用所必需的基本内容都集成在一个尺寸有限的集成电路芯片上。
如果按功能划分,它由如下功能部件组成,即微处理器、数据存储器、程序存储器、并行I/O口、串行口、定时器/计数器、中断系统及特殊功能寄存器。
它们都是通过片内单一总线连接而成,其基本结构依旧是CPU加上外围芯片的传统结构模式。
但对各种功能部件的控制是采用特殊功能寄存器的集中控制方式。
1 .微处理器该单片机中有一个8位的微处理器,与通用的微处理器基本相同,同样包括了运算器和控制器两大部分,只是增加了面向控制的处理功能,不仅可处理数据,还可以进行位变量的处理。
2 .数据存储器片内为128个字节,片外最多可外扩至64k字节,用来存储程序在运行期间的工作变量、运算的中间结果、数据暂存和缓冲、标志位等,所以称为数据存储器。
3. 程序存储器由于受集成度限制,片内只读存储器一般容量较小,如果片内的只读存储器的容量不够,则需用扩展片外的只读存储器,片外最多可外扩至64k字节。
4. 中断系统具有5个中断源,2级中断优先权。