基于UG的平面连杆机构运动仿真和分析
- 格式:pdf
- 大小:154.10 KB
- 文档页数:3

综合论坛新教师教学引言利用 UG 运动分析模块进行机构的运动仿真分析时,能够自动跟踪零件的运动轨迹,通过图表与图形表达从动件的位移、速度、加速度等运动规律,得到运动规律的数值及特性曲线图。
并且能够通过动画演示杠杆机构的实际运动过程,从而确定整个设计的合理性并进行运动干涉分析。
UG 的运动分析模块实现机构的运动仿真,也为下一步做有限元分析、强度分析、结构分析及优化设计打好了基础。
1 UG 运动仿真模块简介UG 的运动仿真模块是对机构的运动轨迹进行跟踪,从而分析机构速度、加速度、位移、作用力及反作用力等。
在 UG 环境下,可以将机构看成是一组连在一起进行运动的连杆的集合,机构进行运动仿真与分析主要分 3 个阶段:(1)前处理器阶段。
这个阶段主要是创建分析方案, 将分析方案得到的信息传送到 ADAMS 解算器;(2)求解阶段。
利用 ADAMS 解算器求解输入数据, 将求解结果传送到运动分析模块;(3)后处理阶段。
运动分析模块分析求解结果,将其转换成图表及报表文件,并生成动画。
ADAMS 解算器可以处理相当复杂的运动模型,在整个运动仿真过程中起着非常重要的作用。
但是如果有更复杂的分析需求时,就需要生成 ADAMS 输入文件,ADAMS 输入文件主要作用是能够输入标准的 ADAMS 软件包, 后处理阶段读入 ADAMS 软件,从而转换成所需要的动画、图表及报表文件。
2 杠杆机构的运动仿真(1)杠杆机构运动仿真的建立 运动分析方案的创建是进行运动仿真的关键。
①连杆(Links )的创建 将杠杆机构活动构件建立连杆。
底板、支撑板、滑块导轨、左盖板、右盖板和固定螺钉设为固定连杆1,旋转手轮、偏心轮和连接螺钉设为连杆2,杠杆设为连杆3,滑块及连接螺钉设为连杆4。
如图 1 所示。
图1 建立连杆②添加运动副 运动副创建之前,机构中的连杆是在自由的,没有约束,具有 6 个自由度,UG 分析模块提供 12 种运动副类型,共分为两大类:普通类型的运动副 8 种,特殊类型的运动副 4 种。
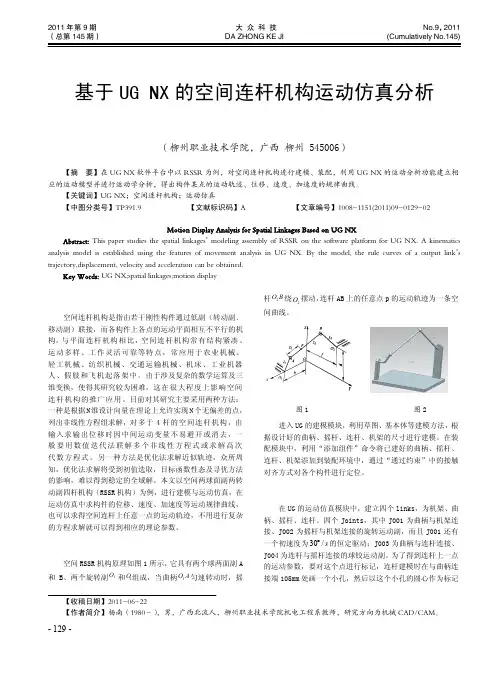
- 129 -基于UG NX 的空间连杆机构运动仿真分析杨 南(柳州职业技术学院,广西 柳州 545006)【摘 要】在UG NX 软件平台中以RSSR 为例,对空间连杆机构进行建模、装配,利用UG NX 的运动分析功能建立相应的运动模型并进行运动学分析,得出构件某点的运动轨迹、位移、速度、加速度的规律曲线。
【关键词】UG NX;空间连杆机构;运动仿真 【中图分类号】TP391.9【文献标识码】A【文章编号】1008-1151(2011)09-0129-02Motion Display Analysis for Spatial Linkages Based on UG NXAbstract: This paper studies the spatial linkages ’ modeling assembly of RSSR on the software platform for UG NX. A kinematics analysis model is established using the features of movement analysis in UG NX. By the model, the rule curves of a output link ’s trajectory,displacement, velocity and acceleration can be obtained.Key Words: UG NX;spatial linkages;motion display1 前言空间连杆机构是指由若干刚性构件通过低副(转动副﹑移动副)联接,而各构件上各点的运动平面相互不平行的机构,与平面连杆机构相比,空间连杆机构常有结构紧凑、运动多样、工作灵活可靠等特点,常应用于农业机械、轻工机械、纺织机械、交通运输机械、机床、工业机器人、假肢和飞机起落架中。
由于涉及复杂的数学运算及三维变换,使得其研究较为困难,这在很大程度上影响空间连杆机构的推广应用。
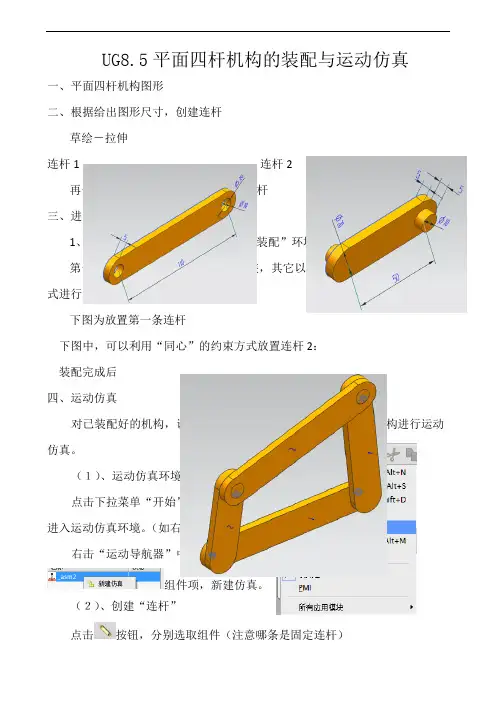
UG8.5平面四杆机构的装配与运动仿真一、平面四杆机构图形二、根据给出图形尺寸,创建连杆草绘-拉伸连杆1 连杆2再分别绘出类似连杆1、2的3、4连杆三、进行连杆的装配:1、新建“模型”,选择“建模”-“装配”环境进入。
第一条连杆以“绝对原点”方式安装,其它以“同心”的“装配约束”方式进行装配下图为放置第一条连杆下图中,可以利用“同心”的约束方式放置连杆2:装配完成后四、运动仿真对已装配好的机构,设置运动副,并根据机构设置驱动,使机构进行运动仿真。
(1)、运动仿真环境:点击下拉菜单“开始”-“运动仿真”进入运动仿真环境。
(如右图)右击“运动导航器”中的组件项,新建仿真。
(2)、创建“连杆”点击按钮,分别选取组件(注意哪条是固定连杆)分别创建L001(固定)、L002、L003、L004。
(3)、创建“运动副”,两“连杆”间的能进行的相对运动方式由“运动副”的类别确定。
点击按钮,在对话框中选择“运动副”类型,例如本机构选择“”。
同样方式创建其余三个铰合点的运动副(图中J002、J003、J004、J005)(4)设置驱动副双击左侧“运动导航器”中已创建的运动副“”进入“运动副”编辑对话框,在驱动选项页中设置运动即可。
(4)运动“解算方案”设定和运动方案可行性“求解”点击按钮,在“解算方案”对话框中设置运动参数,(时间影响运动周期,步数与驱动速度一样影响运动的快慢)。
点击对“解算方案”进行求解,若出现错误报告,则不能进行运动仿真。
点击播放按钮进行运动仿真,点击“”导出运动仿真视频,可以点击“”设置动画播放形式,点击按钮退出运动仿真动画。
基于UG软件的四连杆运动仿真分析的研究报告基于UG软件的四连杆运动仿真分析的研究报告摘要:本文以UG软件为工具,对四连杆运动进行了仿真分析,并对仿真结果进行了详细的描述和分析。
通过仿真分析发现,在不同的驱动方式、不同的转动速度等条件下,四连杆的运动状态、角度变化等均有显著差异,同时也发现四连杆的运动过程中存在一定的瞬时速度过快的情况,需要考虑加装减速装置。
关键词:UG软件;四连杆运动;仿真分析;瞬时速度过快一、引言四连杆运动是一种常见的机械运动形式,在机械设计、运动分析等领域中有着广泛的应用。
如何对四连杆运动进行分析和仿真,是机械工程领域的重要研究方向之一。
本文通过UG软件对四连杆运动进行仿真分析,并对仿真结果进行了详细的描述和分析,旨在对四连杆运动的研究提供一定的参考。
二、四连杆运动的基本原理四连杆运动是由四个连杆构成的运动链条,其中一个连杆为驱动杆,其余三个连杆为被动杆。
四连杆的运动状态受到驱动杆的驱动方式、转动速度等多种因素的影响,需要进行参数化变量的分析和仿真模拟。
三、UG软件仿真模拟1. 模型建立:首先利用UG软件进行四连杆模型的建立,包括杆件的三维建模、连接约束、驱动方式的设定等,得到初始状态下的四连杆结构。
2. 运动仿真:根据仿真目标和要求,对四连杆进行运动仿真,设定不同的驱动方式、不同的转动速度等条件,得到不同条件下的四连杆运动状态。
3. 结果分析:通过对仿真结果的分析,得出不同条件下四连杆的运动规律、运动状态、角度变化等,并结合实际应用需求,对仿真结果进行进一步的优化和改进。
四、仿真结果分析通过UG软件进行四连杆运动仿真分析,得到如下结论:1. 被动杆与驱动杆的角度变化规律:随着驱动杆的转动,被动杆与驱动杆之间的连接杆件的角度也在不断变化,角度变化曲线为抛物线状。
2. 驱动方式的影响:采用不同的驱动方式,四连杆的运动状态亦有较大的差异。
以摆线轮驱动方式为例,该方式下四连杆的运动状态较为平稳、稳定。
基于UG NX4.0的连杆机构运动学仿真摘要:介绍了软件UG NX4.0的机构仿真功能, 在此基础上对连杆机构的仿真过程作了较详细的陈述, 给出其位移、速度和加速度曲线,为利用U G 实现机构的CAD / CA E 一体化作出有益的探索。
关键词:连杆机构; 运动仿真; UG ;CAD;CA E一、引言UG软件是Unigraphics软件的简称,它汇集了美国航空航天和汽车工业的专业经验,以CAD /CAM/CAE一体化而著称1。
CAE包括两大内容:一、有限元分析;二、机构分析。
机构分析模块可以提供静态、运动、动力学计算以及动态仿真等功能。
其运动分析采用了美国MDI公司开发的ADAMS解算器。
UG为机械工程师提供了CAD/CAE/CAM集成的虚拟产品开发环境。
本文利用UG NX4.0 CAD /CAE对六连杆曲柄滑块机构进行运动学分析,便捷地得到了滑块的运动特性。
二、六连杆机构的二维模型的生成机构分析主要包括运动分析和力分析。
其实两者是密切相关的,只是为了分析方便,前者先不考虑作用在机构上的力,并通常假定原动件作等速运动,只从几何上分析机构的位移、速度和加速度等运动情况2。
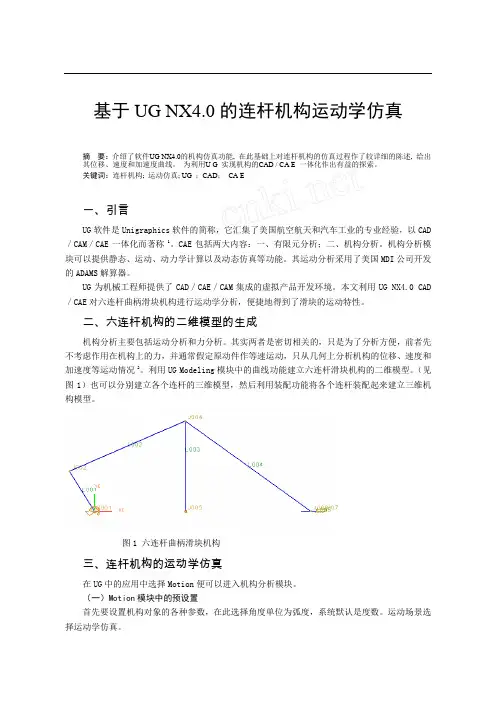
利用UG Modeling模块中的曲线功能建立六连杆滑块机构的二维模型。
(见图1)也可以分别建立各个连杆的三维模型,然后利用装配功能将各个连杆装配起来建立三维机构模型。
图1 六连杆曲柄滑块机构三、连杆机构的运动学仿真在UG中的应用中选择Motion便可以进入机构分析模块。
(一)Motion模块中的预设置首先要设置机构对象的各种参数,在此选择角度单位为弧度,系统默认是度数。
运动场景选择运动学仿真。
1.定义连杆特性在UG 中所有运动构件都可以看成是连杆,可以分别定义L001~L005连杆(其中机架可以不定义)2.定义运动副机构中均为低副。
分别定义旋转副J001~J006,J007定义为滑动副。
其中J001为原动件,添加角速度ω0=10rad/s ,J003和J004为复合旋转副。
毕业设计论文题目: 基于UG的平面四连杆机构设计及运动仿真专业名称机电设备维修与管理学生姓名李小军指导教师季祥毕业时间2011年7月毕业设计任务书指导教师:季祥一、设计题目用基于UG的空间四连杆机构设计及运动仿真二、设计的目的1)掌握UG的基本使用方法。
2)掌握四连杆机构的特点及虚拟装配的方法。
3)掌握UG中运动仿真的方法。
三、设计要求1)平面四连杆机构的三维造型。
2)平面四连杆机构的虚拟装配3)UG中平面四连杆机构的运动仿真。
4)仿真结果的分析四、完成的任务要求说明详细,字迹工整,原理正确,图纸规范,图形清晰,符号标准,线条均匀。
(1)设计与绘制平面四连杆机构,建立运动仿真的模型。
(2)毕业设计说明书(8000以上)1)设计题目2)四连杆机构原理说明3)四连杆机构的三维造型设计及虚拟装配4)UG的四连杆运动仿真5)设计总结及改进意见6)主要参考资料五、参考文献机械设计高等教育出版社主编濮良贵纪名刚机械原理高等教育出版社主编孙恒陈作模UG NX5.0中文版从入门到精通机械工业出版社主编胡仁喜、康士廷、刘昌丽目录摘要 (4)第1章绪论 (5)1.1 UG NX5的功能模块 (5)1.1.1 UG NX5用户界面 (5)1.1.2主要功能 (6)1.2 UG NX5的工作环境 (9)1.3 产品设计的一般过程 (12)1.4 三维造型设计步骤 (13)第二章平面连杆机构 (15)2.1 平面四杆机构的基本形式 (15)2.2 铰链四杆机构中曲柄存在的条件 (16)2.3 铰链四杆机构的演化 (17)第三章平面四杆机构的基本特性 (20)3.1 四杆机构的极位 (20)3.2 四杆机构从动件的急回特性 (20)3.3 平面连杆机构的传力特性 (20)3.4 死点位置 (21)第四章四连杆的三维造型 (22)4.1 机架的三维造型 (22)4.2 连架杆1的三维造型 (26)4.3 连架杆2的三维造型 (28)4.4 连杆的三维造型 (28)第五章四连杆的虚拟装配 (31)5.1 进入装配模块 (31)5.2 添加组件机架 (31)5.3 装配连架杆1 (32)5.4 装配连架杆2 (34)5.5 装配连杆 (35)第六章平面四连杆机构的运动仿真 (40)6.1 新建仿真 (40)6.2 新建连杆 (41)6.3 创建运动副 (43)第七章平面四连杆的运动仿真分析 (46)7.1 运动副图表分析 (46)7.2 死点位置 (49)结论 (51)致谢 (52)参考文献 (53)摘要UG NX是集CAD\CAE\CAM于一体的三维参数化软件,也是当今世界最先进的设计软件,它广泛应用于航空航天、汽车制造、机械电子等工程领域。
![基于UG的四连杆机构的运动分析仿真[1]](https://uimg.taocdn.com/05b9da0a2e60ddccda38376baf1ffc4fff47e243.webp)
基于UG的四连杆机构的运动分析仿真[1]第24卷第4期轻工机械Vol. 24,No. 4.2006年12月L ight IndustryMachineryD ec. , 2006[研究·设计]基于UG的四连杆机构的运动分析仿真沈庆云,沈自林(图章注释新建图章 sun2008-9-27 17:58:05空白)(佛山科学技术学院,广东佛山528000)0 引言机构的运动分析,就是对机构的位移、轨迹、速度、加速度进行分析,根据原动件的运动规律,求解出从动件的运动规律。
由于机构的复杂性,用传统的方法分析机构的运动非常费时,且精度低。
本文以世界著名的CAD .CA E.CAM系统U nigraphics (简称U G )软件为工具,用计算机模型代替机构的实际模型,通过求解计算机模型,获得精确的机构运动参数,用图形和动画来模拟机构的实际运动过程,这是传统的分析方法所不能比拟的。
在UG的机构仿真模块(U G ScenarioforM otion)中嵌入求解器ADAM SKinem atics,可以对二、三维机构进收稿日期: 2005210231行复杂的运动学、动力学分析及设计仿真,分析产品的临界位置、反作用力、速度及加速度。
摘要:利用基于UG的机构运动分析模块,详细介绍了一套完整的四连杆机构的参数化建模设计、运动副的创建与运动仿真。
关键词:参数化建模;连杆机构;运动仿真中图分类号: TH 122 文献标志码:A 文章编号: 100522895 (2006) 04200742021 四连杆参数化建模与装配在这里预先设定四连杆的长度数据及几何造型如表1所示。
将表1各组件装配,即可形成1个四连杆机构(如图1)。
在计算机中创建连杆机构,将连杆1、连杆2、连杆3和机架分别创建成连杆。
图1 四连杆机构表1 四连杆基本参数2 创建运动副(J oints )考虑到所有连杆均作旋转运动,将建立4个旋转副,其中有2个旋转副与地固定(只要将机架设成与地固定即可实现)。

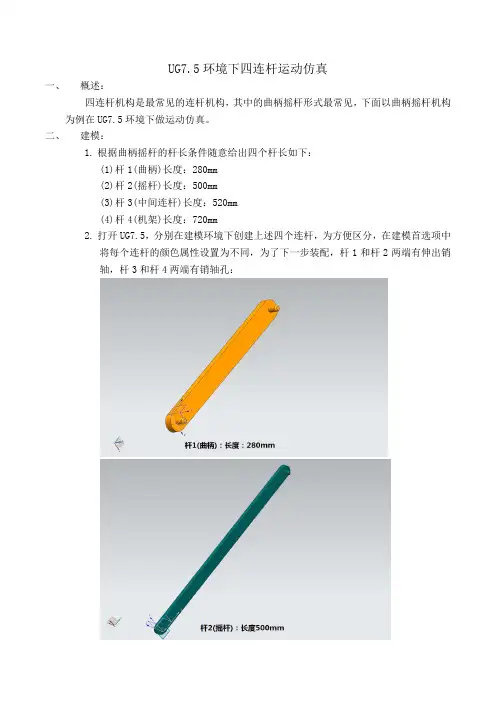
UG7.5环境下四连杆运动仿真一、 概述:四连杆机构是最常见的连杆机构,其中的曲柄摇杆形式最常见,下面以曲柄摇杆机构为例在UG7.5环境下做运动仿真。
二、 建模:1.根据曲柄摇杆的杆长条件随意给出四个杆长如下:(1)杆1(曲柄)长度:280mm(2)杆2(摇杆)长度:500mm(3)杆3(中间连杆)长度:520mm(4)杆4(机架)长度:720mm2.打开UG7.5,分别在建模环境下创建上述四个连杆,为方便区分,在建模首选项中将每个连杆的颜色属性设置为不同,为了下一步装配,杆1和杆2两端有伸出销轴,杆3和杆4两端有销轴孔:三、装配:新建一个装配文件,将第二部建立的四个杆添加,逐个装配,如下图:四、 运动仿真:1.进入运动仿真环境,新建一个仿真文件,并设为工作状态。
2.新建四个连杆(分别与装配图中相对应,曲柄、摇杆、中间连杆和机架分别对应四个连杆),其中gan4(机架要设为接地杆,如下图:)3. 建立运动副:不难看出,整个四杆机构有四个铰点,所以有四个旋转副,其中曲柄与机架之间的旋转副要加驱动;中间连杆两端的两个旋转副要咬合对应的连杆,摇杆与机架之间的旋转副为自由旋转副,详细步骤如下:(1)建立曲柄与机架之间的旋转副J001,选择曲柄为连杆,铰点中心为原点,X轴为方位,并在驱动属性中添加速度为20的恒定驱动,如下图:(2)建立曲柄与中间连杆之间的旋转副J002,选择中间连杆作为连杆,中间连杆与曲柄处铰点中心为原点,选择X轴向为方位,选择曲柄为咬合连杆,咬合连杆的原点与方位与中间连杆相同,如下图:(3)建立摇杆与机架之间的旋转副J003,选择摇杆为连杆,铰点中心为原点,X轴为方位,如下图:(4)建立中间连杆与摇杆之间的旋转副J004,选择连杆为中间连杆,铰点中心为原点,X轴为方位,选择摇杆为咬合连杆,原点和方位与连杆相同,如下图:4.检查:此时查看运动仿真器,在运动仿真motion_1下面,连杆(Link)下面有四个连杆,并且一中一个为接地杆。
基于UG 软件平台的四连杆机构运动仿真分析3余振华(常州机电职业技术学院,江苏常州 213000)摘 要:在NX 草图环境下,对平面四连杆机构进行草图建模。
通过草图约束及尺寸动画功能确定各连杆的尺寸,之后在NX 运动分析环境下,建立相应模型并进行运动学分析,得出构件某点的运动轨迹及速度、加速度的变化规律。
关键词:UG NX;草图;平面四连杆机构;运动仿真中图分类号:T H133.5 文献标识码:A 文章编号:1006-4414(2010)01-0010-02M oti on sim ul a ti on ana lysis of four -bar li n kage ba sed on UG software Pl a tfor mYu Zhen -hua(Changzhou m achinery -electricity vocational technical college,Changzhou J iangsu 213000,China )Abstract:The paper deals with sketch modeling of the p lanar f our -bar linkage in the NX sketch envir on ment .Thr ough the sketch constraint and size cart oon functi ons t o deter m ine the size of each linkage,after that building corres ponding model and carried out kine matics analysis in the NX moti on analysis envir on ment .Itwas concluded that variati on of s ome point ′s traject o 2ry and s peed,accelerati on .Key words:UG NX;sketch;p lanar f our -bar linkage;si m ulati on1 前 言平面四杆机构是平面连杆机构的基础,它虽然结构简单,但其承载能力大,而且同样能够实现多种运动轨迹曲线和运动规律,因而在工程实践中得到了广泛的应用。
运动分析对原来的三维实体模型完成了连杆特性的设置,运动副的建立和外载荷的添加的前置处理后,就完成了运动模型的构建。
此时可以利用UG/Motion运动分析工具栏,对创建的运动模型进行运动仿真,如图9-65所示。
图9-65 运动分析工具栏UG/Motion模块嵌入了Mechanical Dynamics公司(MDI)的求解器ADAMS/Kinematics,在建立运动模型的同时UG/Motion已经为该求解器建立了初始数据或输入文件,只有运行UG/Motion的运动分析模块既可自动的将初始数据和输入文件输入到求解器中,从而得出运动模型运动后的各种数据,完成运动模型合理性的检查。
9.5.1 运动仿真过程的实现UG/Motion的运动分析模块可以设置运动分析的类型,并通过对运动分析过程的控制,可以直观的以动画的形式输出运动模型不同的运动状况,便于用户比较准确了解所设计的运动机构实现的运动形式。
1.设置运动仿真的参数1)运动分析类型的设定UG/Motion的运动分析类型有两类:静态分析和动力学分析。
点击功能菜单区运动分析模块中的运动(Animation)按钮,将弹出一个【运动分析选项】(Analysis Options)对话框,该对话框的第一个选择区域就要求用户选择运动分析的类型,各选项的功能如图9-66所示。
图9-66 【运动分析选项】对话框2)运动控制参数的设定在上述的运动分析选项(Analysis Options)对话框中,第二个区域即要求用户输入运动控制参数:运动时间和运动步骤。
整个运动模型运动的快慢就是由这两个参数决定的。
2.运动仿真过程的动画输出及控制1)运动仿真过程的控制设置完了运动分析的参数后,若选择的运动分析类型为静态分析点击OK键,将弹出一个【静态平衡】(Static Equilibrium)对话框,如图9-67所示。
图9-67 【静态平衡】对话框若选择的运动分析类型为动力学分析点击OK键,将弹出一个【运动过程】(Animation)对话框,对话框各选项的功能如图9-68所示。
基于UG软件的四连杆运动仿真分析UG软件是一款常用的CAD(计算机辅助设计)软件,它能够帮助工程师进行各种模型的建立、装配和分析。
在机械领域,UG软件被广泛应用于各类机械零部件的设计和仿真。
本文将就UG软件的四连杆运动仿真分析进行探讨,并详细介绍其原理、步骤及应用场景。
一、四连杆的基本概念四连杆是一种机械传动机构,由四条杆件和四个旋转副构成。
其中两条较长的杆件在一端旋转固定,称为地杆,另外两条较短的杆件同样旋转固定,称为摇杆。
四连杆的动作主要靠摇杆的运动驱动,使机械系统完成各种工作。
四连杆的工作原理强调套路重复的动作,即摇杆先向一个方向运动,然后再向另一个方向运动,执行往复的动作。
二、四连杆的运动仿真分析原理在使用UG软件进行四连杆运动仿真分析之前,我们需要了解一些基本原理。
首先,我们需要清楚地知道四连杆的各个参数,包括地杆长度、摇杆长度、连杆长度和摇杆旋转轴的位置等。
其次,我们还需要明确四连杆运动的动力学方程,即四个杆件的位置和速度之间的关系。
最后,我们需要掌握运动分析的方法,以便根据四连杆的参数和动力学方程,计算出各个杆件的位置和速度。
三、四连杆运动仿真分析的步骤1. 创建机械结构模型我们首先需要在UG软件中创建四连杆的机械结构模型,包括四连杆的杆件和旋转副等。
在创建过程中,需要设置结构的初始参数,如地杆长度、摇杆长度、连杆长度、摇杆旋转轴的位置等。
此外,还需要定义四连杆的运动路径和工作条件。
2. 定义杆件约束与运动学关系在创建四连杆的模型后,需要对杆件进行约束和位移关系的定义。
我们需要选择恰当的杆件,对其进行约束设置,确定其运动的自由度,以达到正确的运动效果。
同时,还需要定义杆件之间的运动学关系,解决各个杆件之间的相互作用问题。
3. 进行四连杆运动仿真完成约束和位移关系的设置后,我们就可以开始进行四连杆运动仿真。
在进行仿真前,我们需要确定仿真方案和仿真参数,如仿真时间、仿真速度和仿真环境等。
《基于UG的运动仿真及高级仿真》项目一:机构运动仿真项目要求:熟悉UG机构运动仿真模块的内容,掌握运动仿真的一般流程和方法,并根据分析输出结果对机构进行优化。
任务一:熟悉掌握运动仿真基础知识运动分析模块(Scenario for motion)是UG/CAE模块中的主要部分,用于建立运动机构模型,分析其运动规律。
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion模块可以进行机构的干涉分析,跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等。
运动分析模块的分析结果可以指导修改零件的结构设计(加长或缩短构件的力臂长度、修改凸轮型线,调整齿轮比等)或调整零件的材料(减轻或加重或增加硬度等)。
设计的更改可以反映在装配主模型的复制品分析方案中,再重新分析,一旦确定优化的设计方案,设计更改就可反映在装配主模型中。
一、运动方案创建步骤1.创建连杆(Links);2.创建两个连杆间的运动副(Joints)3.定义运动驱动(Motion Driver)无运动驱动(none):构件只受重力作用运动函数:用数学函数定义运动方式恒定驱动:恒定的速度和加速度简谐运动驱动:振幅、频率和相位角关节运动驱动:步长和步数二、创建连杆创建连杆对话框将显示连杆默认的名字,格式为L001、L002 (00)质量属性选项:质量特性可以用来计算结构中的反作用力。
当结构中的连杆没有质量特性时,不能进行动力学分析和反作用力的静力学分析。
根据连杆中的实体,可以按默认设置自动计算质量特性,在大多数情况下,这些默认计算值可以生成精确的运动分析结果。
但在某些特殊情况下,用户必须人工输入这些质量特性。
固定连杆:人工输入质量属性,需要指定质量、惯性矩、初始移动速度和初始转动速度。