自动送料小车的PLC控制 指导书
- 格式:docx
- 大小:249.11 KB
- 文档页数:4
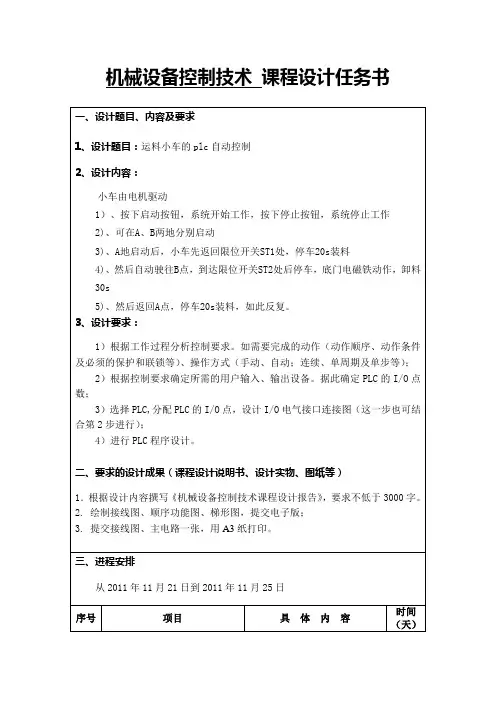
__________________________________________________P L C控制运料小车__________________________________________________项目七 PLC控制运料小车的运行1.项目任务本项目的任务设计一个运料小车往返运动PLC控制系统。
系统控制要求如下:小车往返运动循环工作过程说明如下:小车处于最左端时,压下行程开关SQ4,SQ4为小车的原位开关。
按下启动按钮SB2,装料电磁阀YC1得电,延时20s,小车装料结束。
接着控制器KM3、KM5得电,向右快行;碰到限位开关SQ1后,KM5失电,小车慢行;碰到SQ3时,KM3失电,小车停止。
此后,电磁阀YC2得电,卸料开始,延时15s后,卸料结束;接触器KM4、KM5得电,小车向左快行;碰到限位开关SQ2,KM5失电,小车慢行;碰到SQ4KM4失电,小车停止,回到原位,完成一个循环工作过程。
整个过程分为装料、右快行、右慢行、卸料、左快行、左慢行六个状态,如此周而复始的循环。
图7-1 运料小车往返运动示意图2.任务流程图本项目的具体学习过程见图2-2。
图7-2 任务流程图学习所需工具、设备见表7-1。
序号分类名称型号规格数量单位备注1 工具常用电工工具 1 套2 万用表MF47 1只3设备PLC FX1N-40MR 14 运料小车 1 个5 交流接触器KM3、KM4、KM5 3只6 三相电源插头16A 17 电磁阀YC1、YC2 28 行程开关SQ1、SQ2 2限位开关SQ3、SQ4 21.功能图编程的特点功能图也叫状态图。
它是用状态元件描述工步状态的工艺流程图。
功能转移图与步进梯形图表达的都是同一个程序,其优点是让用户每次考虑一个状态,而不必考虑其它的状态,从而使编程更容易,而且还可以减少指令的程序步数。
功能转移图中的一个状态表示顺序控制过程中的一个工步,因此步进梯形图也特别适用于时间和位移等顺序的控制过程,也能形象、直观的表示顺序控制。

一、控制要求1.1 控制对象介绍自动送料装车系统是用于物料输送的流水线设备,主要是用于煤粉、细砂等材料的运输。
自动送料装车系统一般是由给料器、传送带、小车等单体设备组合来完成特定的过程。
这类系统的控制需要动作稳定,具备连续可靠工作的能力。
通过三台电机和三个传送带、料斗、小车等的配合,才能稳定、有效率地进展自动送料装车过程。
如下列图所示:1.2 控制原理自动送料装车系统是通过电机和限位开关来控制的。
称重开关S2控制汽车开来或开走。
三台电机控制三个传送带。
进料开关K1控制控制进料与否。
检测开关S1控制料斗中物料的空满。
另外,在S2处增设两个七段数码管,用来统计每日的装车数。
装车数的统计采用脉冲计数的方法进展。
脉冲计数方法是当装料车装满时S2断开后,开场定时放送脉冲;当S2闭合时停顿发送脉冲。
一个脉冲的宽度即为一辆汽车。
用两个数码管计数,所计的数即为装车数。
当S2接通时,红灯L1亮,绿灯L2灭,传送电动机M3运行,传送电动机M2延迟M3电动机2S运行,送料电动机M1延迟M2电动机2S运行,料斗K2延迟M2电动机2S翻开出料。
当料满后〔S2断开后〕,料斗K2关闭,电动机M1延时2S后关断,M2在M1停后2S后停顿,M3在M2停顿后2S后停顿,L2灯亮,L1灯灭,此时汽车可以开走。
1.3 自动送料装车系统的启停过程示意图该图中从上到下是启动顺序,从下到上是停顿顺序。
1.4 控制要求初始状态:红灯L1灭,绿灯L2亮,表示允许汽车开进装料,料斗K2,电动机M1,M2,M3皆为OFF。
当汽车到来时〔S2接通表示〕,L1亮,L2灭,M3运行,电动机M2在M3通2S后运行,M1在M2通2S后运行,K2在M1通2S后翻开出料。
当物料满后〔用S2断开表示〕,料斗K2关闭,电动机M1延时2S后关断,M2在M1停2S后停顿,M3在M2停2S后停顿,L2亮,L1灭,表示汽车可以开走。
设计要求:当料不满〔S1为OFF,灯灭〕,料斗开关K2关闭〔OFF〕,灯灭,不出料,进料开关K1翻开〔K1为ON〕进料,否那么不进料。
PLC课程设计指导书课题:运料小车的PLC的控制系统与调试姓名:学号:班级:机电082指导老师:杨青完成日期:20101216江海学院目录一.控制系统的工作原理二:PLC控制系统的设计三:联机调试四:小结五:参考文献运料小车的PLC控制系统设计与调试一.控制系统工作原理小车运料示意图如图1 所示,为小车一处装料,两处轮流卸料。
小车由电动机拖动,电机正转,小车前进,电机反转,小车后退。
料斗底门和小车底门均由电磁阀控制,得电打开,断电闭合。
小车前、中、后终端位置均由限位开关控制。
按下右启动按钮小车右行(前进)至限位开关SQ1 处停下来装料,20 S 后结束,开始左行。
当碰到SQ2 后停下来第一次卸料,15 S 后右行,碰到SQ1 又停下来装料,20 S 后结束,又开始左行,经过SQ2 不停,当碰到SQ3 后停下来第二次卸料,15 S 后右行,碰到SQ1 后又停下来装料。
完成一个工作周期动。
二.PLC系统的设计1.系统的硬件设计1.1PLC的选择与配置依据小车控制系统的工艺流程、实际控制需求以及输入/ 输出变量特点, 选用日本三菱公司生产的FX1s- 20MR (20 点I/O,继电器输出方式) PLC,其输入点数为12,输出点数为8,完全能够满足工艺控制需求。
输入点用来控制小车控制方式的选择、启动、限位停止及控制系统的运行情况,输出点用来控制小车前进、后退,装料、卸料。
PLC 单元配有数据通讯口, 实施PC 机和PLC 的数据通讯1.2.控制系统的电路组成图2 是电机正反转主电路(控制小车前进、后退),图3是PLC 控制部分输入/输出端子接线电路图2、图3 中KM1 和KM2 分别是控制电机正转运行(小车前进)和反转运行(小车后退)的交流接触器。
用KM1 和KM2 的主触点改变进入电动机的三相电源的相序, 即可以改变电动机的旋转方向。
图3 中KM1 的线圈串联了KM2 的辅助常闭触点,KM2 的线圈串联了KM1的辅助常闭触点,组成了硬件互锁电路。
编号:毕业设计说明书课题:基于PLC的运料小车控制院系:机电工程学院专业:机电一体化学生姓名:殷鹏超学号:030110100175指导教师单位:桂林航天工业高等专科学校姓名:秦展田职称:副教授理论研究软件开发2012年 4 月20 日摘要早期运料小车电气控制系统多为继电器—接触器组成的复杂系统,这种系统存在设计周期长、体积大、成本高等缺陷,无数据处理和通信功能,必须有专人负责操作,将PLC应用到运料小车电气控制系统,可实现运料小车的自动化控制,降低系统的运行费用,PLC运料小车电气控制系统具有连线简单,控制速度快,可靠性和可维护性好,易于安装、维修和改造等优点。
随着经济的发展,运料小车不断扩大到各个领域,从手动到自动,逐渐形成了机械化、自动化。
将PLC应用到运料小车电气控制系统,可实现运料小车的自动化控制,降低系统的运行费用。
它功能强大,可扩展到多达128I/O点,且能增加特殊功能模块或扩展板。
通信和数据连接功能选项使得FX1N在体积、通信和特殊功能模块等重要的应用方面非常完美。
本课题主要包括:分析被控对象和明确系统控制要求;PLC选型;确定系统的I/O设备的数量及种类;控制流程设计;控制程序设计。
PLC在运料小车控制系统中的应用,已经在国内外工程、工厂中得到实际应用,具有巨大的经济和社会价值,其智能化和自动化的思路值得以后继续深入研究和推广。
[关键词] PLC;运料小车控制系统PLC control car movement designed to transport matreialsAbstractTraditional transport materials are mostly car relay control, relay control wiring has numerous shortcomings of the high failure rate, and the repair is not easy to maintain the shortcoming. As a control of the current domestic market, the mainstream controller, plc in the market, technology, industry has an important role in the impact of the use of PLC control to replace the relay control has become a trend.The rapid development of PLC in the international situation, the majority of our PLC manufacturers do not have independent intellectual property rights, to participate in international competition PLC products, one of which is the development of strength is not enough. Although the capital investment, production and quality management and other factors also account for a very large proportion, but the quality of the product plays a decisive role in the R & D investment, research and development products and production of crafts. The technology is a part of each of which runs through, PLC core technology development, product follow-up development and production process is to determine the product quality and technical level of the premise, how to further enhance their technical strength,Domestic brands gain market will be the key to competitive advantage.Based on obtained samples for analysis and preliminary results are being used in many brands in the PLC, Siemens, Mitsubishi and omron take absolute advantage, 60% of the users of these brands of PLC products, rockwell / ab, ge-fanuc, and Fuji and other brands also has a considerable market share.Keywords:transport materials car, Mitsubishi PLC, coil, travel switch目录1 引言 (1)1.1 问题的提出及研究意义 (1)1.2 国内外研究现状 (1)1.2.1 国内现状 (1)1.2.2 国外现状 (1)1.3 本文研究的主要内容 (2)2 PLC技术概述 (4)2.1 PLC的定义 (4)2.2 PLC的发展历史与趋势 (4)2.3 PLC的主要特点 (5)2.4 PLC的基本组成及各部分作用 (7)2.5 PLC的应用领域 (10)3 控制系统的设计 (12)3.1 控制系统的工作原理 (12)3.2 小车运动流程图 (13)3.3 运料小车控制系统的PLC选型 (14)3.3.1 控制系统图 (14)3.3.2 PLC框架配置图 (15)3.3.3 PLC的选型 (15)3.4 I\ O地址分配 (17)3.5 系统硬件设计 (18)3.6 控制程序梯形图 (20)3.7 梯形图对应的指令语句 (21)4 输入程序及调试监控 (25)4.1 程序的输入 (25)4.1.1 启动SWOPC-FXGP/WIN-C编程软件 (25)4.1.2 编辑梯形图 (26)4.1.3 转换 (27)4.1.4 写入程序 (28)4.2 通电调试、监控系统 (30)4.2.1 运行程序 (30)4.2.2 监控 (30)4.2.3 调试 (30)5 结论 (31)谢辞 (32)参考文献 (33)致谢 (34)1 引言1.1 问题的提出及研究意义传统的运料小车大都是继电器控制,而继电器控制有着接线繁多,故障率高的缺点,且维护维修不易等缺点。
案例七送料小车的PLC控制一、学习目的1.对送料小车往返控制的了解及认识2.学习限位开关、金属传感器的应用。
3.学习PLC控制减速电机正反转。
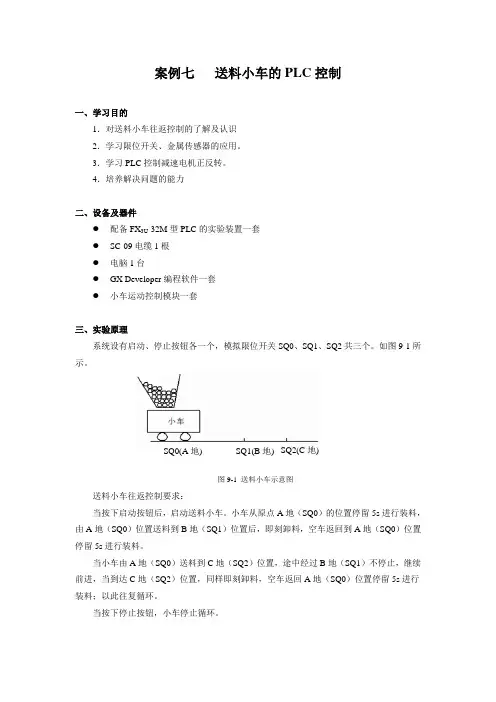
4.培养解决问题的能力二、设备及器件●配备FX3U-32M型PLC的实验装置一套●SC-09电缆1根●电脑1台●GX Developer编程软件一套●小车运动控制模块一套三、实验原理系统设有启动、停止按钮各一个,模拟限位开关SQ0、SQ1、SQ2共三个。
如图9-1所示。
SQ0(A地) SQ1(B地) SQ2(C地)图9-1 送料小车示意图送料小车往返控制要求:当按下启动按钮后,启动送料小车。
小车从原点A地(SQ0)的位置停留5s进行装料,由A地(SQ0)位置送料到B地(SQ1)位置后,即刻卸料,空车返回到A地(SQ0)位置停留5s进行装料。
当小车由A地(SQ0)送料到C地(SQ2)位置,途中经过B地(SQ1)不停止,继续前进,当到达C地(SQ2)位置,同样即刻卸料,空车返回A地(SQ0)位置停留5s进行装料;以此往复循环。
当按下停止按钮,小车停止循环。
四、I/O 分配表表9-1 送料小车I/O 分配表输入口 说明输出口 说明 X0 左限位 Y0 KA1 X1 传感器B1 Y1 KA2 X2 传感器B2 X3 启动 X4 停止 X5复位五、I/O 接线图图9-2 送料小车I/O 接线图注意事项:(1)先将PLC 的电源线插进PLC 正面的电源孔中,再将另一端插到220V 电源插板。
(2)将电源开关拨到关状态,严格按图9-2所示接线,注意24V 电源的正负不可短接,电路不要短路,否则会损坏PLC 触点。
六、梯形图SQ0 SQ1 SQ2停止 启动 复位FX3U图9-3 送料小车梯形图。
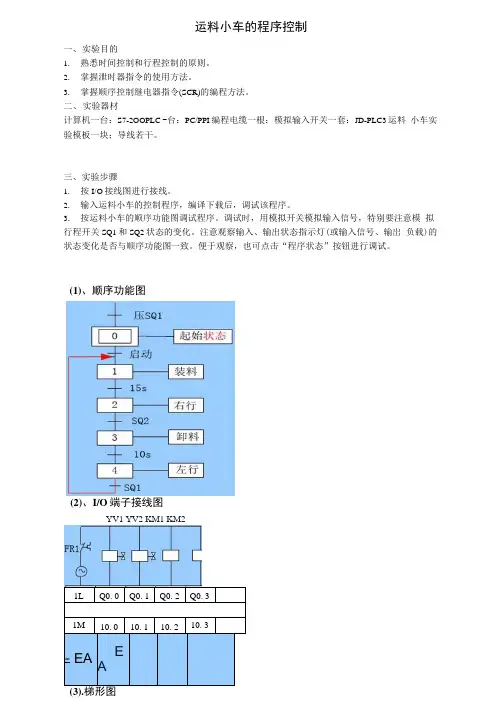
运料小车的程序控制一、实验目的1.熟悉时间控制和行程控制的原则。
2.掌握泄时器指令的使用方法。
3.掌握顺序控制继电器指令(SCR)的编程方法。
二、实验器材计算机一台:S7-2OOPLC -台:PC/PPI编程电缆一根:模拟输入开关一套:JD-PLC3运料小车实验模板一块;导线若干。
三、实验步骤1.按I/O接线图进行接线。
2.输入运料小车的控制程序,编译下载后,调试该程序。
3.按运料小车的顺序功能图调试程序。
调试时,用模拟开关模拟输入信号,特别要注意模拟行程开关SQ1和SQ2状态的变化。
注意观察输入、输出状态指示灯(或输入信号、输岀负载)的状态变化是否与顺序功能图一致。
便于观察,也可点击“程序状态”按钮进行调试。
(1)、顺序功能图(2)、I/O端子接线图YV1 YV2 KM1 KM21L Q0. 0Q0. 1Q0. 2Q0. 31M10. 010. 110. 210. 3二EAE A(3).梯形图网络2I瀏活第-•段旳怡序,拴制开妬S0.1SCR冋络3|斥位裟料,启动定时器—$Q1 W1—I I—T—< )T37T37|15病程序转到第二段£CR程序F37 $02—I I ------- 列网絡5I第一段$CR結朿——SCRE)Ria C I 算段控薊冠 S02SCR网络7SMO.O—I I -------CM1 :)符号述址 汪释 KM1 Q0.2 右行SQ2S0.3—I I —--------- SCRT ) 符导"TOik —T 注釋 SQ2 110.3 行程开关2网路3|第二3CR 程序段皓束—SCRE ) MS 10I 男三SCF 睦序段左制开贻S03SCR网络11|小王启动1压定吋證IN TONPT 100 mzSMO.O T30-1 30-mi7第四SCR程序段结束------- SCSE)网络18|停车后,返目初贻状态’SB.2 $0.1 —I 一——R)4TITLE=程序注释Network 1 //网络标题STL语言//初始化,启动S0.1LD10.0A10.2AN QO.OAN Q0.1AN Q0.2AN Q0.3S SO.L 1Network 2〃激活第一段SCR程序,控制开始LSCR S0.1Network 3//原位装料,启动泄时器LD 10.2= Q0.0TON T37,+150Network 4//15s后程序转到第二段SCR程序LD T37SCRT S0.2Network 5//第一段SCR结朿SCRENetwork 6//第二SCR段控制开始LSCR S0.2Network 7//小车右行LD SM0.0= Q0.2Network 8〃右行到位,程序转到第三SCR程序段LD 10.3SCRT S0.3Network 9//第二SCR程序段结朿SCRENetwork 10//第三SCR程序段控制开始LSCR S0.3Network 11//小车卸料,启动10s泄时器LD SM0.0= QO.lTON T3&+100Network 12//10s后程序转到第四SCR程序段LD T38SCRT S0.4Network 13//第三SCR程序段结束SCRENetwork 14//第四SCR程序控制开始LSCR S0.4Network 15//小车左行LD SMO.O= Q0.3Network 16〃左行到为,程序转到第一SCR程序段LD 10.2SCRT S0.1Network 17//第四SCR程序段结朿SCRENetwork 18〃停车后,返回初始状态LD 10.1R SO 丄 4四、思考题1•总结顺序控制程序的设计方法和调试方法。
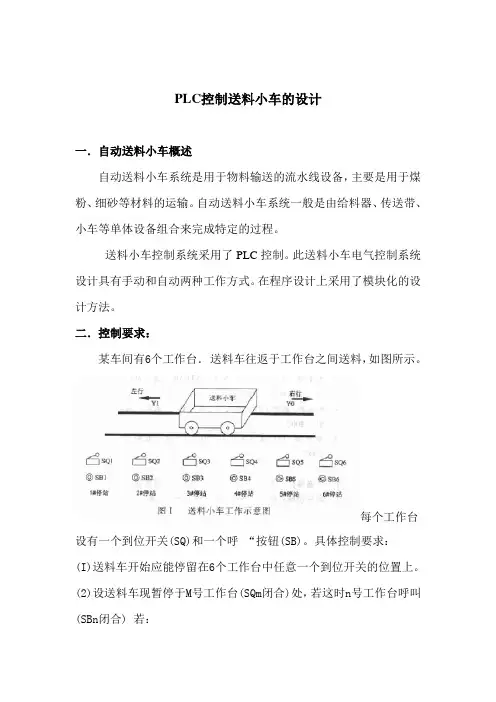
PLC控制送料小车的设计一.自动送料小车概述自动送料小车系统是用于物料输送的流水线设备,主要是用于煤粉、细砂等材料的运输。
自动送料小车系统一般是由给料器、传送带、小车等单体设备组合来完成特定的过程。
送料小车控制系统采用了PLC控制。
此送料小车电气控制系统设计具有手动和自动两种工作方式。
在程序设计上采用了模块化的设计方法。
二.控制要求:某车间有6个工作台.送料车往返于工作台之间送料,如图所示。
每个工作台设有一个到位开关(SQ)和一个呼“按钮(SB)。
具体控制要求:(I)送料车开始应能停留在6个工作台中任意一个到位开关的位置上。
(2)设送料车现暂停于M号工作台(SQm闭合)处,若这时n号工作台呼叫(SBn闭合) 若:①m>n,送料车左行,直至SQn动作,到位停车,即送料车停车位置SQ 的编号大于呼叫按钮SB的编号时,送料车往左运行至呼叫位置后停止;②m<n,送料车右行.直至SQn动作,到位停车,即进料车所停位置SQ 的编号小于呼叫按钮SB前编号时,送料车往右运行至呼叫位置后停止;④ m=n,送料车原位不动,即送料车所停位置SQ的编号与呼叫按钮SB 的编号相同时,送科车不动。
三.PLC选型根据控制要求,系统的输入量有:启、停按钮信号,1号位-6 号位的限位开关SQl—SQ6信号,1号位-6号位的呼叫开关SB1~SB6信号:系统的输出信号有:前进、后退控制电机接触器驱动信号,电机运行的声光信号。
共需实际输人点数l7个,输出点数4个,本文选用日本三菱公司的FXON-40MR产品,其输入点数为24,输出点数为I6点。
小车行驶控制系统PLC的I/O资源配置表如表l所示:系统I/O资源配置表(2)外围设备在外围设备方面,采用RS232通信或RS485通信方式,与上位机连接,外部输入设备有光电开关,接近开关,按钮等。
外部输出设备有接触器,电磁阀,指示灯等。
输入/输出点分配如图1所示。
三菱图1 PLC输入/输出点分配图四.控制程序设计本程序设计的关键是处理好呼叫按钮和到位开关的位置关系,为此我们采用了将每个位置的行程开关与每个位置的按钮记录到数据寄存器中去,如将送料小车当前位置送到数据寄存器DO中,将呼叫工作台号送数据寄存器Dl中,然后通过比较DO与Dl中的数据,决定送料小车运行方向和达到的目标位置。
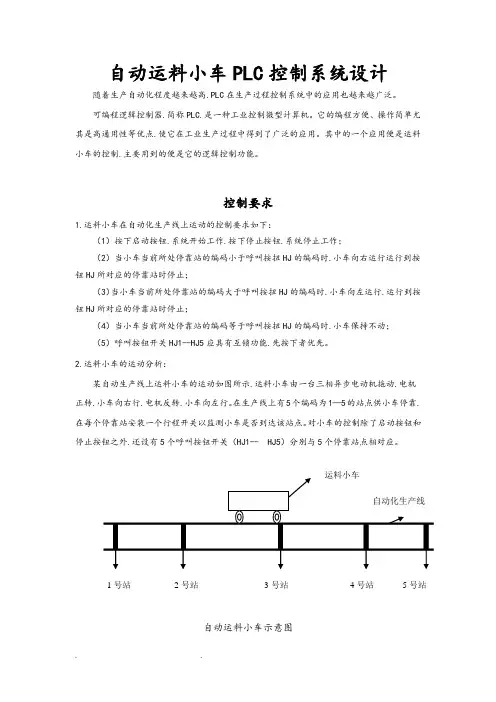
自动运料小车PLC控制系统设计随着生产自动化程度越来越高.PLC在生产过程控制系统中的应用也越来越广泛。
可编程逻辑控制器.简称PLC.是一种工业控制微型计算机。
它的编程方便、操作简单尤其是高通用性等优点.使它在工业生产过程中得到了广泛的应用。
其中的一个应用便是运料小车的控制.主要用到的便是它的逻辑控制功能。
控制要求1.运料小车在自动化生产线上运动的控制要求如下:(1)按下启动按钮.系统开始工作.按下停止按钮.系统停止工作;(2)当小车当前所处停靠站的编码小于呼叫按扭HJ的编码时.小车向右运行运行到按钮HJ所对应的停靠站时停止;(3)当小车当前所处停靠站的编码大于呼叫按扭HJ的编码时.小车向左运行.运行到按钮HJ所对应的停靠站时停止;(4)当小车当前所处停靠站的编码等于呼叫按扭HJ的编码时.小车保持不动;(5)呼叫按钮开关HJ1--HJ5应具有互锁功能.先按下者优先。
2.运料小车的运动分析:某自动生产线上运料小车的运动如图所示.运料小车由一台三相异步电动机拖动.电机正转.小车向右行.电机反转.小车向左行。
在生产线上有5个编码为1—5的站点供小车停靠.在每个停靠站安装一个行程开关以监测小车是否到达该站点。
对小车的控制除了启动按钮和自动运料小车示意图程序设计1.行程开关在该程序中.5个站的行程开关分别用数字0-4来表示.当小车在1号站时.行程开关X007得电.将数字0传送到数据寄存器D0;当小车在2号站时.行程开关X010得电.将数字1传送到数据寄存器D0。
依次类推.当小车在5号站时.行程开关X013得电.将数字4传送到数据寄存器D0。
它的助记符程序为:LD X007MOV K0 D0 ;小车在1号站LD X010MOV K1 D0 ;小车在2号站LD X011MOV K2 D0 ;小车在3号站LD X012MOV K3 D0 ;小车在4号站LD X013MOV K4 D0 ;小车在5号站所对应的梯形图如下所示:行程开关梯形图2.小车启停辅助继电器当按下启动按钮时.小车开始运动.该辅助继电器M0得电;当按下停止按钮时.小车停止运动.该辅助继电器M0失电。
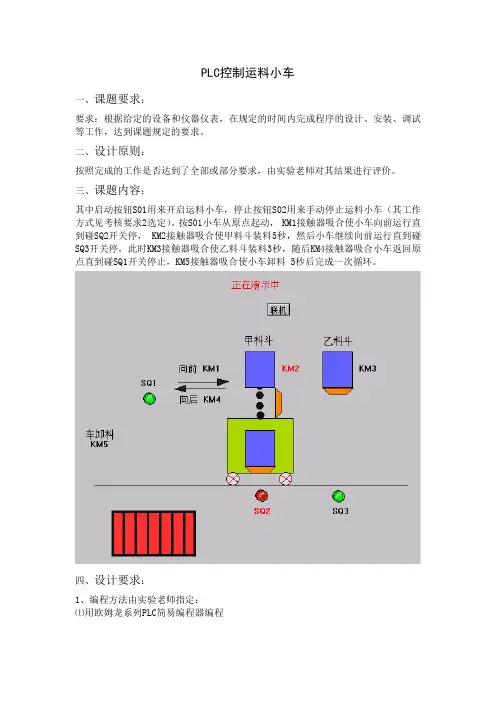
PLC控制运料小车一、课题要求:要求:根据给定的设备和仪器仪表,在规定的时间内完成程序的设计、安装、调试等工作,达到课题规定的要求。
二、设计原则:按照完成的工作是否达到了全部或部分要求,由实验老师对其结果进行评价。
三、课题内容:其中启动按钮S01用来开启运料小车,停止按钮S02用来手动停止运料小车(其工作方式见考核要求2选定)。
按S01小车从原点起动, KM1接触器吸合使小车向前运行直到碰SQ2开关停, KM2接触器吸合使甲料斗装料5秒,然后小车继续向前运行直到碰SQ3开关停,此时KM3接触器吸合使乙料斗装料3秒,随后KM4接触器吸合小车返回原点直到碰SQ1开关停止,KM5接触器吸合使小车卸料 5秒后完成一次循环。
四、设计要求:1、编程方法由实验老师指定:⑴用欧姆龙系列PLC简易编程器编程⑵用计算机软件编程2、工作方式:A.小车连续循环与单次循环可按S07自锁按钮进行选择,当S07为“0”时小车连续循环,当S07为“1”时小车单次循环;B.小车连续循环,按停止按钮S02小车完成当前运行环节后,立即返回原点,直到碰SQ1开关立即停止;当再按启动按钮S01小车重新运行;C.连续作3次循环后自动停止,中途按停止按钮S02则小车完成一次循环后才能停止;3、按工艺要求画出控制流程图;4、写出梯形图程序或语句程序;5、用欧姆龙系列PLC简易编程器或计算机软件进行程序输入;6、在考核箱上接线,用电脑软件模拟仿真进行调试。
五、输入输出端口配置:输入设备输入端口编号接考核箱对应端口启动按钮S01 0000 SO1停止按钮S02 0001 SO2开关SQ1 0002 电脑和PLC自动连接开关SQ2 0003 电脑和PLC自动连接开关SQ3 0004 电脑和PLC自动连接选择按钮S07 0005 S07六、问题:小车工作方式设定:A.小车连续循环与单次循环可按S07自锁按钮进行选择,当S07为“0”时小车连续循环,当S07为“1”时小车单次循环;B.小车连续循环,按停止按钮S02小车完成当前运行环节后,立即返回原点,直到碰SQ1开关立即停止;当再按启动按钮S01小车重新运行;C.连续作3次循环后自动停止,中途按停止按钮S02小车完成一次循环后才能停止。
目录1设计任务与要求 (1)1.1课程设计任务 (1)1.2课程设计要求 (1)2 设计方案 (3)2.1运料小车的运动分析 (3)2.2设备控制要求 (4)2.3整体方案论证 (4)2.4系统资源分配 (5)2.4.1 I\ O地址分配 (5)2.4.2 数字量输入部分 (5)2.4.3 数字量输出部分 (6)3硬件电路设计 (7)4软件设计 (9)4.1.1 梯形图 (9)4.1.2 指令表 (12)5 调试过程 (15)5.1呼叫按钮 (15)5.2行程开关 (15)5.3比较 (15)5.4向左运动 (15)5.5向右运动 (15)5.6调试操作 (16)6 结论 (18)参考文献 (19)1设计任务与要求1.1课程设计任务任务描述某自动生产线上运料小车的运动如图所示,运料小车由一台三相异步电动机拖动电动机正转,小车右行,电机反转,小车左行。
在生产线上有5个编码为1~5的站点供小车停靠,在每一个停靠站安装一个行程开关以监测小车是否到达该站点。
对小车的控制除了启动按钮和停止按钮之外,还设有5个呼叫开关(SB1~SB5)分别与5个停靠点相对应。
1.2课程设计要求(1)按下启动按钮,系统开始工作,按下停止按钮,系统停止工作;(2)当小车当前所处停靠站的编码小于呼叫按钮SB的编码时,小车向右运行,运行到呼叫按钮SB所对应的停靠站时停止;(3)当小车当前所处停靠站的编码大于呼叫按钮SB的编码时,小车向左行,运行到呼叫按钮SB所对应的停靠站时停止;(4)当小车当前所处停靠站的编码等于呼叫按钮SB的编码时,小车保持不动;(5)呼叫按钮开关SB1~SB5应具有互锁功能,先按下者优先。
(6)设计PLC硬件电器连接图。
(7)设计PLC控制程序(梯形图或指令程序)。
2 设计方案2.1运料小车的运动分析某自动生产线上运料小车的运动如图2-1所示:图2-1运料小车示意图运料小车由一台三相异步电动机拖动,电机正转,小车向右行,电机反转,小向左行。
项目设计运料小车智能控制目录摘要............................................. - 2 - 第一部分引言.................................... - 3 - 第二部分小车运送物料的总体设计 ................. - 4 -2.1控制要求:................................. - 4 -2.2系统硬件设备配置........................... - 5 -2.2.1运料小车控制的主回路设计 .............. - 6 -2.2.2、分析控制要求,确定输入、输出设备..... - 7 -2.2.3 分配I/O接口.......................... - 7 -2.2.4I/O外围接线图......................... - 8 -2.2.5 PLC的选型............................ - 8 - 第三部分控制系统设计 .......................... - 9 -3.1控制功能图以及逻辑表达式................... - 9 -3.1.1功能图表达式.......................... - 9 -3.1.2逻辑表达式........................... - 11 -3.1.3根据逻辑表达式画出梯形图 ............. - 11 - 第四部分系统调试及结果分析 ..................... - 12 -4.1 PLC实验操作规程.......................... - 12 -4.2 连接线路 ................................. - 12 -4.3 结果分析 ................................. - 13 -4.4系统调试与解决的问题...................... - 14 -4.4.1调试................................. - 14 -4.4.2检查电路............................. - 14 - 心得体会........................................ - 16 - 参考文献........................................ - 17 -运料小车智能控制摘要运料小车是在现代工厂中普遍存在的,而自动化的智能小车却并不多见,大多数的工厂仍然靠人力手动控制小车装卸物料的,这不仅效率低而且耗费人力物力,降低生产效率,对企业的生产发展起到限制的作用。
中北大学可编程控制器课程设计说明书可编程控制器课程 设计说明书自动送料装车系统设计学生姓名: 学 专 院: 业:学号: 信息与通信工程学院 电气工程及其自动化 樊永生指导教师:2013 年1 月第 1 页 共 13 页中北大学可编程控制器课程设计说明书中北大学课程设计任务书2012/2013 学年第 一 学期学 专院: 业:信息与通信工程学院 电气工程及其自动化 学 号: 自动送料装车系统 1 月 7 日~1 月 18 日 校内 樊永生 王忠庆学 生 姓 名: 课程设计题目: 起 迄 日 期: 课程设计地点: 指 导 教 师: 系 主 任:下达任务书日期: 2013 年 1 月 7 日第 2 页 共 13 页中北大学可编程控制器课程设计说明书课 程 设 计 任 务 书1.设计目的:用 PLC 构成系统自动送料装车系统。
2.设计内容和要求(包括原始数据、技术参数、条件、设计要求等) : 控制要求:初始状态:红灯 L1 灭,绿灯亮,表示允许汽车开进装料,料斗 K2,电动机 M1、M2、M3 皆为 OFF。
当汽车到来时(用 S2 接通表示) ,L1 亮,L2 灭,M3 运行,电动机 M2 在 M3 通 2s 后运行3.设计工作任务及工作量的要求〔包括课程设计计算说明书(论文)、图纸、 实物样品等〕 :本课题应完成以下设计内容: 1)完成梯形图。
2)调试并运行程序。
3)课程设计说明书第 3 页 共 13 页中北大学可编程控制器课程设计说明书课 程 设 计 任 务 书4.主要参考文献:1 常斗南.可编程序控制器原理、应用、实验.北京:机械工业出版社出版社,19985.设计成果形式及要求:完成课程设计说明书一份,要求: 1)写出主要设计思路,工作原理; 2)画出梯形图; 3)调试出现的问题及解决方法; 4)提交程序清单。
6.工作计划及进度:2013 年 1 月 7 日 ~ 1 月 12 日:查阅相关文献资料,总体方案设计 1 月 13 日 ~ 1 月 18 日:编制程序、上机调试 1 月 18:答辩或成绩考核系主任审查意见:签字: 年 月 日第 4 页 共 13 页中北大学可编程控制器课程设计说明书目录1 绪论……………………………………………………………………………………………1 2 内容设计 ……………………………………………………………………… 12.1 自动运料小车控制系统的构成……………………………………………… 1 2.2 设计与分析 ………………………………………………………………… 2 3 自动装车运料系统的工作 ……………………………………………… 23.1 自动装车运料系统的工作流程……………………………………………… 2 3.2 自动装车运料系统的控制原理……………………………………………… 3 4 5 6 7 8 PLC 外部接线图………………………………………………………………… 4 程序指令表……………………………………………………………………… 4 运料小车控制系统梯形图……………………………………………………… 5 仿真时序图………………………………………………………………… 6 总结……………………………………………………………………………… 7参考文献………………………………………………………………………………8第 5 页 共 13 页中北大学可编程控制器课程设计说明书1. 绪论可编程控制器是一种为工业机械控制所设计的专用计算机, 在各种自动控制系 统中有着广泛的应用,它是在继电器控制和计算机控制基础上开发的产品,逐渐发 展成为以微处理器为核心,把自动化技术、计算机技术,通信技术融为一体的新型 工业自动控制装置。
7.6 PLC的基本应用7.6.2 PLC应用系统设计自动送料小车控制系统送料小车控制要求如图7.43(b)所示,I/O地址分配及功能如表7.12所示,主电路如图7.43(a)所示,控制电路如图7.43(c)所示。
在限位开关SQ1处装料,5s后装料结束,开始右行。
碰到SQ2后停下来卸料,5s 后左行。
碰到SQ1后又停下来装料。
这样不停地循环工作。
直到按下停止按钮SB3。
按钮SB1和SB2分别用来起动小车右行和左行。
在电动机正反转控制梯形图的基础上,设计出的小车控制梯形图如图7.44所示。
为了使小车自动停止,将I0.4和I0.3的常闭触点分别串入Q0.0和Q0.1的线圈电路。
为了使小车自动起动,将控制装、卸料延时的定时器T40和T41的常开触点分别与手动起动右行和左行的I0.1和I0.0的常开触点并联。
并用两个限位开关的常开触点分别接通装料、卸料电磁阀和相应的定时器。
设小车左行,碰到限位开关SQ1(I0.3)时,它的常闭触点使Q0.1断开,小车停止左行。
它的常开触点使Q0.2和T40线圈接通,开始装料和延时。
5s后T40的常开触点闭合,启动小车右行。
SQ1(I0.3)断开后停止装料。
右行和卸料过程的分析与上面的基本相同。
按下停止按钮SB3(I0.2)后小车将停止运动。
表7.12 自动送料小车控制系统PLC I/O地址分配功能名称动作器件I / O地址右行启动SB1 I0.0左行启动SB2 I0.1停止SB3 I0.2左限位SQ1 I0.3右限位SQ2 I0.4 电机过载保护FR1 I0.5右行KM1 Q0.0左行KM2 Q0.1装料YV1 Q0.2卸料YV2 Q0.3图7.43 自动送料小车控制电路。
2自动送料装车plc控制
2.1 自动送料装车plc控制设计任务书
自动送料装车PLC控制
自动送料装车系统的控制要求:
下图是自动装车模拟控制系统图。
初始状态:绿灯(L1)亮,红灯(L2)灭,表示允许汽车开进装料,此时,进料阀门(K1),料斗阀门(K2),电动机(M1,M2,M3)皆为OFF状态。
当汽车到来时,检测开关S3接通(负载板上未设,可从通用器件板选取),红色信号灯L2亮,绿色L1灭,传送带驱动电动机M3运行;2s后,电动机M2运行;再经过2s,M1运行,依次顺序起动送料系统。
电动机M3运行后,进料阀门K1打开料斗进料,料斗装满时,检测开关S1=1,进料阀门K1关闭(设1料斗物料足够装满1车);料斗出料阀门K2在M1运行及料满(S1=1)后,打开放料,物料通过传送带的传送,装入汽车。
当装满汽车后,称重开关S2动作,料斗出料阀门K2关闭,同时电动机断电停止,2s后M2停止,再过2s,M1停止,L1亮,L2灭,表示汽车可以开走。
图2-1 自动装车模拟控制系统图
2.2 PLC控制程序设计
1、流程图
图2-1流程图
2、输入/输出信号分配
表2-2输入/输出信号分配
输入输出X0 S3 检测小车Y0 M3 电机3 X1 S2 称重Y1 M2 电机2
X2 S1 检测料是否
满
Y2 M1 电机1
Y3 K1 进料阀门
Y4 K2 出料阀门
Y5 L1 绿灯
Y6 L2 红灯。
实验三自动送料小车的PLC控制实验一、实验目的1.熟悉常用的PLC指令;2.掌握顺序控制程序的设计方法。
二、实验设备1.安装了CX-Programmer编程软件的计算机1台;2.自动送料小车实验箱。
三、实验内容1.分析自动送料装车控制任务,掌握被控系统动作要求;2.设计PLC的地址分配表和顺序功能图;3.根据顺序功能图设计出具体的梯形图程序,并进行调试。
四、实验原理自动送料装车控制在自动化工厂或生产线中是不可缺的重要环节。
从原料的输送,至各道工序加工点,再到成品的输出。
由于受场地、实施难度、成本及灵活性等人为的限制,很难采用单一长距离传送,而是采用多段式传送系统。
下图是一个3段的皮带运输机的传动系统。
图1 自动送料装车控制要求:1.按下启动开关ST,则依次启动,前级传送带落后于后级传送带开始启动,使得原料不在后级传送带上堆积,每级间延时30秒开始启动,顺序为第三级——第二级——第一级(第四级暂不用);第一级传送带开启同时打开电磁阀H21;2.S3处于on时表示车已装满,即将开走,重新装车,H20灯亮;3.按下停止开关STP,则电磁阀立即关闭,四级传送带由前往后依次停止,每级间仍延时30S,顺序为第一级——第二级——第三级,目的是清空传送带上的物料;4.S0、S1、S2合上分别表示此级发生故障,应使得前级的传送带立即停止工作,而后级的传送带依次延时30秒停止工作。
根据控制要求设计的I/O地址分配表和输入输出电气接线图如下:表1 地址分配表图2 输入输出电气接线图采用顺序控制程序设计法,首先做出符合控制要求的顺序功能图参考如下:图3 顺序功能图五、实验步骤1.设计I/O分配表;2.按照送料小车功能要求设计顺序功能图;3.按照设计的顺序功能图采用通用指令编写梯形图程序;4.用欧姆龙CP1H系列PLC模块调试程序:先将PLC和计算机连接,再下载梯形图程序,运行调试,并记录实验过程中看到的现象。
六、实验报告使用江苏大学实验报告纸完成实验报告,记录实验中设计的内容,具体包括:1)地址分配;2)送料小车的顺序流程图3)电气接线图;4)梯形图程序;5)思考题:使用顺序控制法编写程序时,采用步进指令和通用指令(启保停和置位、复位)有何不同之处,分别简述。
实验三自动送料小车的PLC控制实验
一、实验目的
1.熟悉常用的PLC指令;
2.掌握顺序控制程序的设计方法。
二、实验设备
1.安装了CX-Programmer编程软件的计算机1台;
2.自动送料小车实验箱。
三、实验内容
1.分析自动送料装车控制任务,掌握被控系统动作要求;
2.设计PLC的地址分配表和顺序功能图;
3.根据顺序功能图设计出具体的梯形图程序,并进行调试。
四、实验原理
自动送料装车控制在自动化工厂或生产线中是不可缺的重要环节。
从原料的输送,至各道工序加工点,再到成品的输出。
由于受场地、实施难度、成本及灵活性等人为的限制,很难采用单一长距离传送,而是采用多段式传送系统。
下图是一个3段的皮带运输机的传动系统。
图1 自动送料装车
控制要求:
1.按下启动开关ST,则依次启动,前级传送带落后于后级传送带开始启动,使得原料不在后级传送带上堆积,每级间延时30秒开始启动,顺序为第三级——第二级——第一级(第四级暂不用);第一级传送带开启同时打开电磁阀H21;2.S3处于on时表示车已装满,即将开走,重新装车,H20灯亮;
3.按下停止开关STP,则电磁阀立即关闭,四级传送带由前往后依次停止,每级间仍延时30S,顺序为第一级——第二级——第三级,目的是清空传送带上的物料;
4.S0、S1、S2合上分别表示此级发生故障,应使得前级的传送带立即停止工作,而后级的传送带依次延时30秒停止工作。
根据控制要求设计的I/O地址分配表和输入输出电气接线图如下:
表1 地址分配表
图2 输入输出电气接线图
采用顺序控制程序设计法,首先做出符合控制要求的顺序功能图参考如下:
图3 顺序功能图
五、实验步骤
1.设计I/O分配表;
2.按照送料小车功能要求设计顺序功能图;
3.按照设计的顺序功能图采用通用指令编写梯形图程序;
4.用欧姆龙CP1H系列PLC模块调试程序:先将PLC和计算机连接,再下载梯形图程序,运行调试,并记录实验过程中看到的现象。
六、实验报告
使用江苏大学实验报告纸完成实验报告,记录实验中设计的内容,具体包括:1)地址分配;2)送料小车的顺序流程图3)电气接线图;4)梯形图程序;5)思考题:使用顺序控制法编写程序时,采用步进指令和通用指令(启保停和置位、复位)有何不同之处,分别简述。