工业机器人结构原理图详解
- 格式:pdf
- 大小:214.11 KB
- 文档页数:7
工业机器人的组成结构
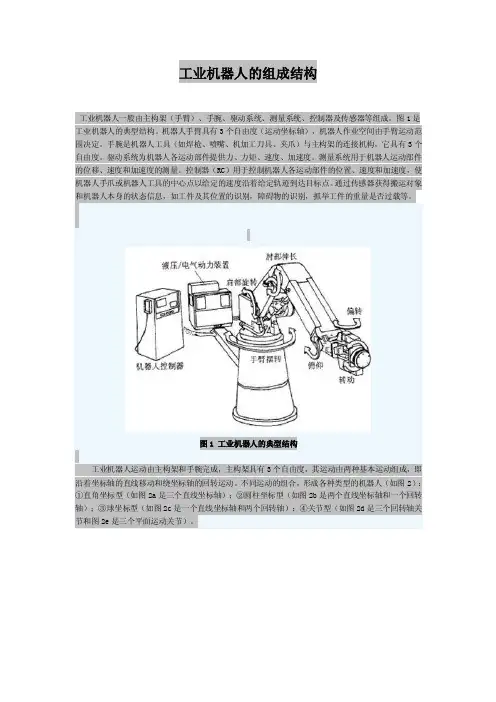
工业机器人一般由主构架(手臂)、手腕、驱动系统、测量系统、控制器及传感器等组成。
图1是工业机器人的典型结构。
机器人手臂具有3个自由度(运动坐标轴),机器人作业空间由手臂运动范围决定。
手腕是机器人工具(如焊枪、喷嘴、机加工刀具、夹爪)与主构架的连接机构,它具有3个自由度。
驱动系统为机器人各运动部件提供力、力矩、速度、加速度。
测量系统用于机器人运动部件的位移、速度和加速度的测量。
控制器(RC)用于控制机器人各运动部件的位置、速度和加速度,使机器人手爪或机器人工具的中心点以给定的速度沿着给定轨迹到达目标点。
通过传感器获得搬运对象和机器人本身的状态信息,如工件及其位置的识别,障碍物的识别,抓举工件的重量是否过载等。
图1 工业机器人的典型结构
工业机器人运动由主构架和手腕完成,主构架具有3个自由度,其运动由两种基本运动组成,即沿着坐标轴的直线移动和绕坐标轴的回转运动。
不同运动的组合,形成各种类型的机器人(如图2):①直角坐标型(如图2a是三个直线坐标轴);②圆柱坐标型(如图2b是两个直线坐标轴和一个回转轴);③球坐标型(如图2c是一个直线坐标轴和两个回转轴);④关节型(如图2d是三个回转轴关节和图2e是三个平面运动关节)。
a)直角坐标型 b)圆柱坐标型 c)球坐标型 d)多关节型 e)平面关节型
图2 工业机器人的基本结构形式。


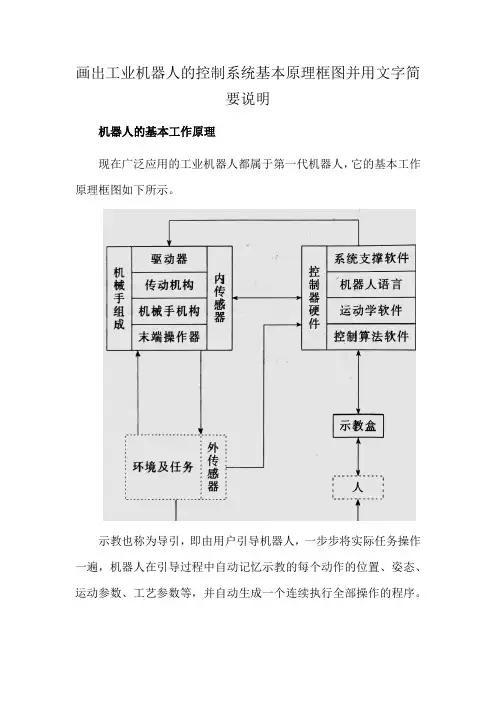
画出工业机器人的控制系统基本原理框图并用文字简要说明机器人的基本工作原理现在广泛应用的工业机器人都属于第一代机器人,它的基本工作原理框图如下所示。
示教也称为导引,即由用户引导机器人,一步步将实际任务操作一遍,机器人在引导过程中自动记忆示教的每个动作的位置、姿态、运动参数、工艺参数等,并自动生成一个连续执行全部操作的程序。
完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作,这就是示教与再现。
机器人的机械臂是由数个刚性杆体和旋转或移动的关节连接而成,是一个开环关节链,开链的一端固接在基座上,另一端是自由的安装着末端执行器(如焊枪),在机器人操作时,机器人手臂前端的末端执行器必须与被加工工件处于相适应的位置和姿态,而这些位置和姿态是由若干个臂关节的运动合成的。
因此,机器人运动控制中,必须要知道机械臂各关节变量空间和末端执行器的位置和姿态之间的关系,这就是机器人运动学模型。
一台机器人机械臂的几何结构确定后,其运动学模型即可确定,这是机器人运动控制的基础。
机器人机械手端部从起点的位置和姿态到终点的位置以及姿态的运动轨迹空间曲线叫做路径。
轨迹规划的任务是用一种函数来“内插”或“逼近”给定的路径,并沿时间轴产生一系列“控制设定点”,用于控制机械手运动。
目前常用的轨迹规划方法有空间关节插值法和笛卡尔空间规划两种方法。
当一台机器人机械手的动态运动方程已给定,它的控制目的就是按预定性能要求保持机械手的动态响应。
但是,由于机器人机械手的惯性力、耦合反应力和重力负载都随运动空间的变化而变化,因此要对它进行高精度、高速度、高动态品质的控制是相当复杂且困难的。
目前工业机器人上采用的控制方法是把机械手上每一个关节都当做一个单独的伺服机构,即把一个非线性的、关节间耦合的变负载系统,简化为线性的非耦合单独系统。
工业机器人内部结构及基本组成原理详解(总18页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除工业机器人内部结构及基本组成原理详解工业机器人详解你对工业机器人有着什么样的了解关于工业机器人,我们过去也反反复复推送了很多的文章,在这一次,我们将尝试解决有关---在工业环境中使用的最常见的机器人和作业时经常会遇到的问题。
关于工业机器人定义什么可以被认为是一个工业机器人什么不能被称为工业机器人工业机器人直到最近才能避开这种混乱。
不是在工业环境中使用的每个机电设备都可以被认为是机器人。
根据国际标准组织的定义,工业机器人是一种可编程的三自由度或多轴自动控制的可编程多用途机械手。
这几乎是在谈论工业机器人时被接受的定义。
工业机器人自中年以来发生了什么变化越来越多的工程师和企业家正在寻找越来越多的机器人技术,帮助在工业环境中优化工作流程的方式。
随着时代的发展和机器人技术的进步,机器人手臂必须为诸如仓储中使用的群组AGV等新手铺路。
我们经常说典型的工业机器人由工具,工业机器人手臂,控制柜,控制面板,示教器以及其他外围设备组成。
那么这些是什么这些部分通常都在一起,控制柜类似于机器人的大脑。
控制面板和示教器构成用户环境。
工具(也称为末端执行器)是为特定任务设计的设备(例如焊接或喷涂)。
机器人手臂基本上是移动工具的东西。
但并不是每个工业机器人都像一个手臂。
不同机器人有不同类型的结构。
控制面板---操作员使用控制面板来执行一些常规任务。
(例如:改变程序或控制外围设备)。
应用“机器人工人”----什么时候应该使用工业机器人而不是人工相信这个问题大家思考的次数并不少了。
理想情况下,这应该是双赢的。
想快速看到效果,你需要知道什么是别人最不喜欢的工作。
想得最多的是那些重复的,乏味的工作,需要从工作人员那边进行大量单调的行动,这个思考是正确的,因为正是如此,例如从一个输送机到另一个输送机。