机械基础——静力分析基础
- 格式:ppt
- 大小:2.42 MB
- 文档页数:28
机械设计基础课程形成性考核作业(一)第1章静力分析基础1.取分离体画受力图时,__CEF__力得指向可以假定,__ABDG__力得指向不能假定。
A.光滑面约束力B。
柔体约束力 C.铰链约束力D。
活动铰链反力E。
固定端约束力F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在__B__得方向上,使投影方程简便;矩心应选在_FG_点上,使力矩方程简便。
A.与已知力垂直B。
与未知力垂直C.与未知力平行D。
任意E.已知力作用点 F.未知力作用点G.两未知力交点H.任意点3。
画出图示各结构中AB构件得受力图。
4。
如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,α=30︒、求两吊杆得受力得大小.解:受力分析如下图列力平衡方程:又因为AB=BC第2章常用机构概述1.机构具有确定运动得条件就是什么?答:当机构得原动件数等于自由度数时,机构具有确定得运动2。
什么就是运动副?什么就是高副?什么就是低副?答:使两个构件直接接触并产生一定相对运动得联接,称为运动副。
以点接触或线接触得运动副称为高副,以面接触得运动副称为低副.3.计算下列机构得自由度,并指出复合铰链、局部自由度与虚约束。
(1)n=7,P L=10,PH=0 (2)n=5,P L=7,P H=0C 处为复合铰链(3)n=7,PL=10,PH=0(4)n=7,P L=9,P H=1E、E’有一处为虚约束 F 为局部自由度C处为复合铰链第3章平面连杆机构1。
对于铰链四杆机构,当满足杆长之与得条件时,若取_C_为机架,将得到双曲柄机构.A。
最长杆B。
与最短杆相邻得构件C.最短杆D.与最短杆相对得构件2.根据尺寸与机架判断铰链四杆机构得类型。
a)双曲柄机构b)曲柄摇杆机构c)双摇杆机构d)双摇杆机构3.在图示铰链四杆机构中,已知,l BC=150mm,lCD=120mm,l AD=100mm,AD为机架;若想得到双曲柄机构,求lAB得最小值。
机械基础杆件的静力分析1. 引言在机械领域中,杆件是一种常见的结构元素,用于构建各种机械装置。
静力分析是对杆件在静力作用下的力学性能进行分析和计算的过程。
本文将介绍机械基础杆件的静力分析方法,包括受力分析、应力分析和变形分析。
2. 受力分析在进行静力分析之前,首先需要进行受力分析,确定杆件上受到的外力和内力。
外力可以是来自其他结构物的载荷,也可以是外部施加的力或力矩。
内力则是由于外力作用而在杆件内部产生的应力引起的。
通过受力分析,可以获得各个杆件的受力情况,为后续的应力分析和变形分析提供依据。
3. 应力分析应力分析是静力分析中的重要环节。
通过对杆件内部的应力进行分析,可以确定杆件是否能够承受外力载荷,以及破坏的可能性。
应力分析包括两个方面:正应力和剪应力的计算。
正应力是指沿着杆件截面法线方向的应力,而剪应力则是沿着截面平面方向的应力。
常用的应力计算方法包括静力学平衡条件和材料力学方程。
3.1 正应力的计算正应力的计算通常采用静力学平衡条件。
根据平衡条件,杆件上各点的合力和合力矩为零。
通过求解这些方程,可以得到各点处的正应力分布。
此外,还需要考虑杆件的几何形状,以及材料的弹性模量和截面面积等参数。
正应力的计算公式如下:σ = F / A其中,σ是正应力,F是受力,A是截面面积。
3.2 剪应力的计算剪应力的计算也采用静力学平衡条件。
剪应力可以通过应力矢量的分解得到。
假设剪应力的作用平面为x-y平面,剪应力的计算公式如下:τ = F / A其中,τ是剪应力,F是受力,A是截面面积。
4. 变形分析变形分析是对杆件在受力作用下产生的变形进行分析和计算的过程。
变形分析的目的是确定杆件的位移和变形程度,评估其结构稳定性。
常用的变形计算方法包括位移方法和位移曲线法。
4.1 位移方法位移方法是根据杆件的几何形状和受力情况,通过求解位移方程来计算杆件的位移量。
位移方程的求解需要考虑杆件的几何形状、材料的弹性模量和截面惯性矩等参数。

机械设计基础课程形成性考核作业(一)第1章静力分析基础1.取分离体画受力图时,__CEF__力的指向可以假定,__ABDG__力的指向不能假定。
A.光滑面约束力B.柔体约束力C.铰链约束力D.活动铰链反力E.固定端约束力F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在__B__的方向上,使投影方程简便;矩心应选在_FG_点上,使力矩方程简便。
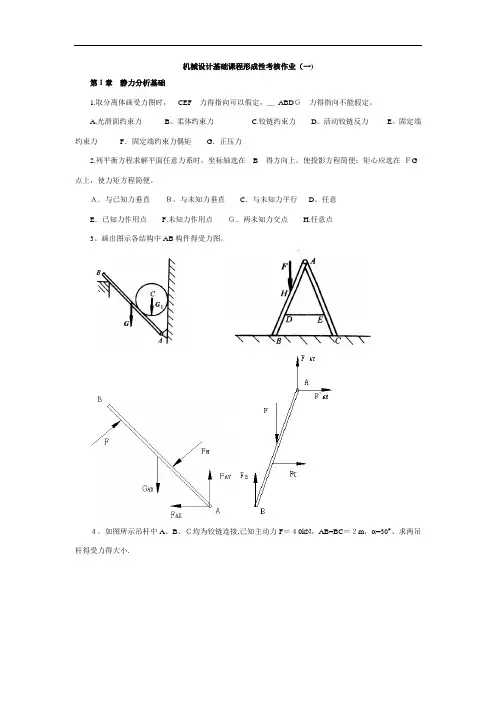
A.与已知力垂直B.与未知力垂直C.与未知力平行D.任意E.已知力作用点F.未知力作用点G.两未知力交点H.任意点3.画出图示各结构中AB构件的受力图。
4.如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,=30.求两吊杆的受力的大小。
解:受力分析如下图列力平衡方程:Fx0又因为AB=BCF A sinF C sinF A FCFy02F A sinFFF A F B40KN2sin第2章常用机构概述1.机构具有确定运动的条件是什么?答:当机构的原动件数等于自由度数时,机构具有确定的运动2.什么是运动副?什么是高副?什么是低副?答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
(1)n=7,P L=10,P H=0(2)n=5,P L=7,P H=0F3n2P L PF3n2P L P HH37210352711C处为复合铰链(3)n=7,P L=10,P H=0(4)n=7,P L=9,P H=1F3n2P L PF3n2P L P HH372103729112E、E’有一处为虚约束F为局部自由度C处为复合铰链第3章平面连杆机构1.对于铰链四杆机构,当满足杆长之和的条件时,若取_C_为机架,将得到双曲柄机构。
A.最长杆B.与最短杆相邻的构件C.最短杆D.与最短杆相对的构件2.根据尺寸和机架判断铰链四杆机构的类型。

国家开放大学《机械设计基础》形考任务1-4参考答案形考作业1第1章 静力分析基础1.取分离体画受力图时,(CEF)力的指向可以假定,(ABDG)力的指向不能假定。
A.光滑面约束力B.柔体约束力C.铰链约束力D.活动铰链反力E.固定端约束力F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在(B)的方向上,使投影方程简便;矩心应选在(G)点上,使力矩方程简便。
A.与已知力垂直B.与未知力垂直C.与未知力平行D.任意E.已知力作用点F.未知力作用点G.两未知力交点H.任意点3.画出图示各结构中AB构件的受力图。
参考答案:4.如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,α=30︒.求两吊杆的受力的大小。
参考答案:列力平衡方程:ΣFx=0又因为AB=BCF A ﹒sinα=FC﹒sinαF A =FCΣFY=02FA﹒sinα=F∴FA =FB=F/ 2sinα=40KN第2章 常用机构概述1.机构具有确定运动的条件是什么?参考答案:当机构的原动件数等于自由度数时,机构具有确定的运动。
2.什么是运动副?什么是高副?什么是低副? 参考答案:使两个构件直接接触并产生一定相对运动的联结,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
参考答案:(1)n=7,P L =10,P H =0 F=3n-2P L -P H=3×7-2×10-0=1C 处为复合铰链 (2)n=5,P L =7,P H =0 F=3n-2P L -P H =3×5-2×7-0 =1(3)n=7,P L =10,P H =0 F=3n-2P L -P H=3×7-2×10-0 =1(4)n=7,P L =9,P H =1 F=3n-2P L -P H =3×7-2×9-1 =2E、Eˊ有一处为虚约束,F 为局部自由度第3章 平面连杆机构1.对于铰链四杆机构,当满足杆长之和的条件时,若取___为机架,将得到双曲柄机构。
机械设计基础课程形成性考核作业(一)第1章静力分析基础1.取分离体画受力图时,C、E、F力的指向可以假定,A、B、D、G力的指向不能假定。
A.光滑面约束力B.柔体约束力C.铰链约束力D.活动铰链反力E.固定端约束力F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在___B___的方向上,使投影方程简便;矩心应选在__G___点上,使力矩方程简便。
A.与已知力垂直B.与未知力垂直C.与未知力平行D.任意E.已知力作用点F.未知力作用点G.两未知力交点H.任意点3.画出图示各结构中AB构件的受力图。
4.如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,=30.求两吊杆的受力的大小。
列力平衡方程:Fx0又因为AB=BCF A sinF C sinF A FCFy02F A sinFFF A F B40KN2sin第2章常用机构概述1.机构具有确定运动的条件是什么?答:当机构的原动件数等于自由度数时,机构具有确定的运动。
2.什么是运动副?什么是高副?什么是低副?答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
机构的自由度计算(1)n=7,P L=10,P H=0(2)n=5,P L=7,P H=0F3n2P L PF3n2P L P HH37210352711C处为复合铰链(3)n=7,P L=10,P H=0(4)n=7,P L=9,P H=1F3n2P L PF3n2P L P HH372103729112E、E’有一处为虚约束F为局部自由度C处为复合铰链第3章平面连杆机构1.对于铰链四杆机构,当满足杆长之和的条件时,若取_C__为机架,将得到双曲柄机构。
A.最长杆B.与最短杆相邻的构件C.最短杆D.与最短杆相对的构件2.根据尺寸和机架判断铰链四杆机构的类。