运动控制系列教程固高GTS
- 格式:docx
- 大小:36.92 KB
- 文档页数:2
工控:C#如何控制运动卡现在越来越多的非标设备使用的是运动控制卡,那什么是运动控制卡?运动控制卡是一种基于PC机及工业PC机、用于各种运动控制场合(包括位移、速度、加速度等)的上位控制单元。
所以运动控制卡的编程就需要用到高级语言,常用的有C++,,Labview,C#这几种下面高级语言以C#为例,运动控制卡以固高GT-400-G-PCI(4轴控制卡)为例常见的系统架构一控制卡组成1.控制卡控制卡需要插在PC的PCI插槽内,露出的接口CN17需要用排线和外部端子板连接运动控制卡2.端子板端子板一般装在配电盘上,用于接线,下图中左边的四个AXIS就是轴系的脉冲接口右边为IO和限位接线端子最上门的CN17需要用排线连接到PC内的运动控制卡端子板二.配置运动控制卡(固高官网下载地址:/pro_view-3.html)1.首先装好驱动程序,驱动包可以找供应商拿2.配置卡的参数安装好驱动后,打开固高配置软件,主要配置为伺服的脉冲模式,正负极限的设置,急停的设置当中细节太多这边不一一讲3.用demo控制轴运动配置好参数后,用配置软件动一下轴确定轴参数都对后才能用上位机控制轴一的配置界面轴控制三.用C#编程1.新建一个winform窗体程序,把固高的动态链接库拷贝进去(正常和供应商索取驱动还有相关资料)动态链接库还有文件2.程序内引用gts文件右击项目➡添加➡现有项➡选择刚才拷贝的文件添加完效果3.开始编程卡操作流程:初始化➡读取参数配置(就是用DEMO软件配置好的参数)➡按逻辑控制每个轴归零➡程序控制轴进行位移运动我们在新建一个GtsCard类,把gts类中提供的方法重新整理下,方便以后复用//固高运动控制卡 public class GtsCard { /// <summary> /// 初始化,加载配置,清除轴系报错/// </summary> /// <param name='cardNum'></param> /// <param name='filePath'></param> /// <param name='axis'></param> /// <returns></returns> public bool Initial(gtsCardID gtsCard, Axis[] axis) { short result; bool isOk = false; try { //channel : 打开运动控制器的方式。


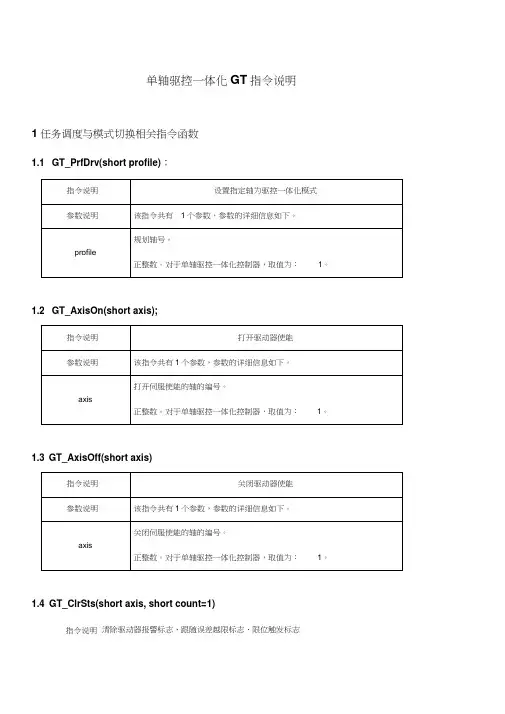
单轴驱控一体化GT指令说明1任务调度与模式切换相关指令函数1.1 GT_PrfDrv(short profile);1.2 GT_AxisOn(short axis);1.3 GT_AxisOff(short axis)1.4 GT_ClrSts(short axis, short count=1)清除驱动器报警标志、跟随误差越限标志、限位触发标志指令说明1.5 GT_SetCtrlMode(short axis,short ctrlMode)1.6 GT_TuneEnable(short axis,short enable)1.7 GT_SetTuneCmd(short axis,short phase,short cmdPersent)1.8 GT_UpdatePriority(short axis)1.9 GT_GetSysMode(short axis,short *pSysMode)2电流环相关指令函数2.1 GT_SetCurrPid(short control,short kp,short ki,short limit)2.2 GT_SetCurrFbLPFHz(short axis,short fc)2.4 GT_SetCurrLPF2Hz(short axis,short fc)2.5 GT_SetPosOffset(short axis,short offset)2.6 GT_GetPosOffset(short axis,short *offset)2.7 GT_Getla(short axis,short *pla)2.8 GT_Getlb(short axis,short *plb)2.9 GT_Getldref(short axis,short *pldref)2.10 GT_Getld(short axis,short *pld)GT_Getlqref(short axis,short *plqref)2.11GT_GetIq(short axis,short *plq)2.13 GT_GetUdc(short axis,short *pUdc)2.14 GT_GetUac(short axis,short *pUac)2.15 GT_GetErrcode(short axis,short *pErrcode)3速度环相关指令函数3.1 GT_SetVelPid(short control,short kp,short ki,short limit)3.2 GT_SetVelFbLPFHz(short axis,short fc)3.3 GT_SetVelAnLPFHz(short axis,short fc)3.4 GT_SetQref(short axis,double qRef)3.5 GT_GetQref(short axis,short *pQref)GT_GetQfb(short axis,short *pQfb)3.63.8 GT_GetQPrm(short profile,TQPrm *pPrm)4压力环相关指令函数4.1 GT_SetPrsPid(short control,short index,double kp,double ki,long integralLimit,short limit)4.2 GT_SetPref(short axis,long prsRef)4.3 GT_GetPref(short axis,long *pPref)4.4 GT_GetPfb(short axis,short *pPfb)4.5 GT_SetPrsPrm(short profile,TPrsPrm *pPrm)4.6 GT_GetPrsPrm(short profile,TPrsPrm *pPrm)5.其他指令5.1 GT_SetPSParams(short axis, short type, short iCont, short iPeak,short pwmFRQ, short vRate, short vBus, short wRate, short pwmDT)5.2 GT_SetMotorParams(short axis,TMrtPrm *mrtprm)5.3 GT_SetPumpPrm(short axis,short pumpType)5.4 GT_SetVref(short axis,short vRef)5.5 GT_SetTref(short axis,short tRef)5.6 GT_GetMtemp(short axis,short *pMtemp)5.8 GT_SetOCParams(short axis,short iUp,short iDn)5.10 GT_SetOPParams(short axis,short iUp,short iDn)5.11 GT_SetOTParams(short axis,short tUp,short tDn,short tOn,short tOff)5.12 GT_SetPBrkParams(short axis,short iT h)5.13 GT_SetOSpdParams(short axis,short vLim))。
XY 平台与机电一体化实验V1.1固高科技(深圳)有限公司2005 年11 月XY平台实验指导书I版权声明固高科技(深圳)有限公司保留所有版权固高科技有限公司(以下简称固高科技)具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或间接的复制、制造、加工、使用本产品及相关部分。
声明固高科技保留在不预先通知的情况下修改设备和文档的权力。
固高科技不承担由于使用本说明书或本产品不当,所造成的直接的、间接的、特殊的、附带的、或相应的损失和赔偿。
XY平台实验指导书II安全注意事项XY 平台主要用于教学和科研。
在安装,使用和维护之前,请仔细阅读本手册。
请将本手册备在身边,以备需要时随时查阅。
使用注意事项使用(安装、运转、保养、检修)前,请务必熟悉并全部掌握本手册和其它相关资料,在熟知全部机器知识、安全知识、以及注意事项后再使用设备。
本手册将安全注意事项分为“危险”“注意”“强制”“禁止”分别记载。
表1-1 警告标志不正确的操作将会导致重大人身事故。
不正确的操作会导致设备损坏。
必须要做的操作。
被禁止的操作。
另外,即使“注意”所记载的内容,也可能因为不同的情况产生严重后果,因此任何一条注意事项都很重要,在设备使用过程中请严格遵守。
虽然不符合“危险”“注意”的内容,但是用户在使用过程中必须严格遵守的事项,在相关地方以记载。
XY平台实验指导书III目录版权声明................................................................................. (I)声明................................................................................. .. (I)安全注意事项................................................................................. (II)使用注意事项................................................................................. (II)前言................................................................................. .. (1)第1 章系统简介 (2)1.1 系统组成................................................................................. .. (2)1.2 系统控制结构................................................................................. . (3)第2 章运动控制器基础实验 (4)2.1 实验目的................................................................................. .. (4)2.2 实验原理与基础知识................................................................................. . (4)2.2.1 运动控制系统结构 (4)2.2.2 GT-400 系列运动控制器介绍 (6)2.2.3 运动控制器典型应用 (7)2.2.4 基于计算机标准总线的运动控制器的优缺点: (8)2.3 实验设备................................................................................. .. (9)2.4 实验步骤................................................................................. .. (9)2.5 实验报告................................................................................. . (11)第3 章传感器原理与应用实验 (12)3.1 实验目的................................................................................. . (12)3.2 基础知识................................................................................. . (12)3.3 实验原理................................................................................. . (12)3.4 实验设备................................................................................. . (13)3.5 实验步骤: .............................................................................. (13)3.6 实验报告................................................................................. . (15)第4 章电机与驱动器使用和调整实验 (16)4.1 实验目的: .............................................................................. (16)4.2 知识回顾: .............................................................................. (16)4.3 实验设备: .............................................................................. (17)4.4 实验步骤: .............................................................................. (17)4.4.1 步进电机控制实验 (18)4.4.2 交流伺服系统位置控制实验 (21)4.4.3 交流伺服系统速度控制实验 (22)4.5 实验报告................................................................................. . (24)第5 章运动控制器的调整-数字滤波器的基本控制作用 (27)5.1 实验目的................................................................................. . (27)XY平台实验指导书IV5.2 基础知识................................................................................. . (27)5.3 实验设备: .............................................................................. (28)5.4 实验步骤: .............................................................................. (28)5.5 实验总结: .............................................................................. (32)第6 章插补原理和实现实验—运动控制器的编程 (33)6.1 实验目的................................................................................. . (33)6.2 理论回顾................................................................................. . (33)6.3 实验设备................................................................................. . (35)6.4 实验步骤................................................................................. . (35)第7 章数控代码编程实验 (40)7.1 实验目的................................................................................. . (40)7.2 理论回顾................................................................................. . (40)7.3 实验设备................................................................................. . (43)7.4 实验步骤................................................................................. . (43)7.5 实验报告及总结................................................................................. . (44)附录B XY 平台演示软件的使用说明 (45)B.1.1 菜单和工具栏 (52)B.1.2 系统状态显示 (52)B.1.3 基于轴的控制 (52)B.1.4 基于坐标系的控制 (53)B.1.5 输入输出控制 (53)B.1.6 GT 命令编辑和运行 (53)B.1.7 基本参数设置窗口 (53)B.1.8 选项设置窗口 (53)B.1.9 状态栏 (53)B.1.10 XY(Z)平台控制窗口 (54)B.1.11 XY(Z)平台基本参数设置窗口 (54)图表目录 (58)XY平台实验指导书1前言XY 平台是许多机电一体化系统的微缩模型,它与机电一体化许多设备一样,有四个电机控制轴。
GTS-800系列运动控制器用户手册RB.D2019.07版权申明版权申明固高科技有限公司 保留所有权力固高科技有限公司(以下简称固高科技)保留在不事先通知的情况下,修改本手册中的产品和产品规格等文件的权力。
固高科技不承担由于使用本手册或本产品不当,所造成直接的、间接的、特殊的、附带的或相应产生的损失或责任。
固高科技具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
运动中的机器有危险!使用者有责任在机器中设计有效的出错处理和安全保护机制,固高科技没有义务或责任对由此造成的附带的或相应产生的损失负责。
联系我们固高科技(深圳)有限公司地 址:深圳市高新技术产业园南区深港产学研基地西座二楼W211室电 话:************* 26737236 26970824 传 真:*************电子邮件:********************** 网 址:固高科技(香港)有限公司地 址:香港九龍觀塘偉業街108號絲寶國際大廈10樓1008-09室電 話:+(852) 2358-1033 傳 真:+(852) 2719-8399 電子郵件:******************* 網 址:臺灣固高科技股份有限公司地 址:台中市西屯區工業區三十二路86號3楼 電 話:+886-4-23588245 傳 真:+886-4-23586495 電子郵件:*********************前言前言感谢选用固高运动控制器为回报客户,我们将以品质一流的运动控制器、完善的售后服务、高效的技术支持,帮助您建立自己的控制系统。
固高产品的更多信息固高科技的网址是。
在我们的网页上可以得到更多关于公司和产品的信息,包括:公司简介、产品介绍、技术支持、产品最新发布等等。
您也可以通过电话(0755-26970817)咨询关于公司和产品的更多信息。
技术支持和售后服务您可以通过以下途径获得我们的技术支持和售后服务:电子邮件:**********************;电话:0755-26970843发函至:深圳市高新技术产业园南区园深港产学研基地西座二楼W211室固高科技(深圳)有限公司邮编:518057用户手册的用途用户通过阅读本手册,能够了解GTS系列运动控制器的基本结构,正确安装运动控制器,连接控制器与电机控制系统,完成运动控制系统的基本调试。
运动控制系列教程固高GTS
运动控制是指通过控制电机和运动控制器实现对运动系统的精确控制。
在现代工业生产中,运动控制被广泛应用于机械设备、自动化生产线、机
器人等领域。
固高GTS系列是一款高性能的运动控制器,具有可编程性强、易于集成、运动稳定等特点,广泛应用于各种运动控制系统中。
本教程将分为以下几个部分对固高GTS系列的运动控制进行介绍和教学。
一、固高GTS系列概述(200字)
-介绍固高GTS系列的基本特点和应用领域。
-说明GTS系列的硬件结构和工作原理。
二、固高GTS系列的安装和配置(200字)
-介绍如何正确安装GTS系列运动控制器。
-说明如何进行控制器的基本配置和参数设置。
三、固高GTS系列的运动控制编程(300字)
-介绍GTS系列的编程语言和编程环境。
-说明如何使用GTS系列的开发工具进行编程。
-提供一些编程示例和常用函数的说明。
四、固高GTS系列的运动控制实例(300字)
-提供一些实际应用案例,展示GTS系列在不同领域中的应用。
-介绍如何利用GTS系列实现不同类型的运动控制,如直线运动、圆弧插补、速度控制等。
五、固高GTS系列的故障排除与维护(200字)
-提供故障排除的常见问题和解决方法。
-介绍如何进行系统的维护和保养,以确保系统的稳定运行。
六、固高GTS系列的最新技术(200字)
-介绍固高GTS系列的最新技术和应用案例。
-展望GTS系列在未来的发展方向和趋势。
通过以上的教学内容,读者可以了解固高GTS系列运动控制器的基本原理和使用方法,掌握运动控制的基本技能,并能够应用于实际的运动控制系统中。
同时,读者还可以了解到固高GTS系列在不同领域中的应用案例,为未来的运动控制工作提供参考和借鉴。