永磁同步电机控制原理 共29页
- 格式:ppt
- 大小:962.50 KB
- 文档页数:29


永磁同步电机控制原理位置控制是指将电机转子的位置控制在给定的位置上,常用的方法有传统的电流环控制和矢量控制。
传统的电流环控制是通过控制电机的电流来实现位置控制。
首先,测量电机的转子位置,通常使用光电编码器或霍尔传感器。
然后,通过闭环控制系统计算得到合适的电流指令。
最后,将电流指令发送到电机驱动器,控制电机的电流。
该方法的优点是简单且稳定,但低效。
矢量控制是一种较为先进的方法,可以实现更高的转速和更高的效率。
矢量控制通过直接控制电机的转子位置和转矩来实现位置控制。
矢量控制的原理是将电机的转子电流和磁场定向地控制在给定的位置上。
为了实现矢量控制,需要测量电机的转子位置和转速,并通过采样和滤波等技术对其进行处理。
然后,通过矢量控制算法计算得到合适的电流指令,并将其发送到电机驱动器。
电机驱动器会根据电流指令调整电机的相电流,从而控制电机的转子位置和转矩。
除了位置控制,永磁同步电机的控制还包括转速控制和转矩控制。
转速控制是指将电机的转速控制在给定的范围内。
常用的方法有开环控制和闭环控制。
开环控制是指根据电机驱动信号的占空比和频率来控制电机转速。
通过改变驱动信号的占空比和频率可以改变电机的转速。
该方法简单易实现,但不稳定且精度较低。
闭环控制是指在电机的转子位置和速度反馈信号的基础上,通过PID控制器或其他控制算法,计算得到合适的电压指令,并将其发送到电机驱动器。
电机驱动器会根据电压指令调整电机的相电压,从而控制电机的转速。
转矩控制是指将电机的输出转矩控制在给定的范围内。
常用的方法有矢量控制和直接转矩控制。
矢量控制是指在电机的转子位置、速度和转矩反馈信号的基础上,通过矢量控制算法计算得到合适的电流指令,并将其发送到电机驱动器。
电机驱动器会根据电流指令调整电机的相电流,从而控制电机的转矩。
直接转矩控制是指通过测量电机输出转矩并在闭环控制系统中计算得到合适的电流指令,并将其发送到电机驱动器。
电机驱动器会根据电流指令调整电机的相电流,从而控制电机的转矩。
一、电机分类二、永磁同步电机的分类三、PMSM的运行原理四、坐标变换五、PMSM的数学模型六、伺服系统软件设计七、SVPWM原理及实现方法一、电机分类:1、按作用分:电动机和发电机。
电动机将电能转化为机械能;发电机将其他形式的能量转化为电能。
2、按工作电源分类根据电动机工作电源的不同,可分为直流电动机和交流电动机。
其中交流电动机还分为单相电动机和三相电动机。
3、按结构及工作原理分类电动机按结构及工作原理可分为直流电动机,异步电动机和同步电动机。
同步电动机还可分为永磁同步电动机、磁阻同步电动机和磁滞同步电动机。
异步电动机可分为感应电动机和交流换向器电动机。
感应电动机又分为三相异步电动机、单相异步电动机和罩极异步电动机等。
交流换向器电动机又分为单相串励电动机、交直流两用电动机和推斥电动机。
直流电动机按结构及工作原理可分为无刷直流电动机和有刷直流电动机。
有刷直流电动机可分为永磁直流电动机和电磁直流电动机。
电磁直流电动机又分为串励直流电动机、并励直流电动机、他励直流电动机和复励直流电动机。
永磁直流电动机又分为稀土永磁直流电动机、铁氧体永磁直流电动机和铝镍钴永磁直流电动机。
4、按用途分类电动机按用途可分为驱动用电动机和控制用电动机。
驱动用电动机又分为电动工具(包括钻孔、抛光、磨光、开槽、切割、扩孔等工具)用电动机、家电(包括洗衣机、电风扇、电冰箱、空调器、录音机、录像机、影碟机、吸尘器、照相机、电吹风、电动剃须刀等)用电动机及其它通用小型机械设备(包括各种小型机床、小型机械、医疗器械、电子仪器等)用电动机。
二、永磁同步电机的分类:永磁同步电机由于具有以下优点而得到了广泛的应用:1)功率密度大(同等功率,特性体积小)2)功率因数高(气隙磁场主要或全部由转子磁场提供)3)效率高(不需要励磁绕组,绕组损耗小)4)结构紧凑、体积小、重量轻、维护简单。
永磁同步电机分为正弦波电流驱动的永磁同步电机(PMSM)和方波电流驱动永磁同步电机(BLDCM)。


永磁交流同步电机矢量控制理论基础0、失量控制的理论基础是两个坐标系变换,这是每一个学习过交流调速的人应该熟记的两种变换。
介于目前市面上流行的各类书籍的这一部分总有些这里那里的问题(也就是错误)。
为了自己不被误导,干脆自己推导一边,整理如下。
所有的推导针对3相永磁同步电机的矢量控制。
1、永磁交流同步电机的物理模型。
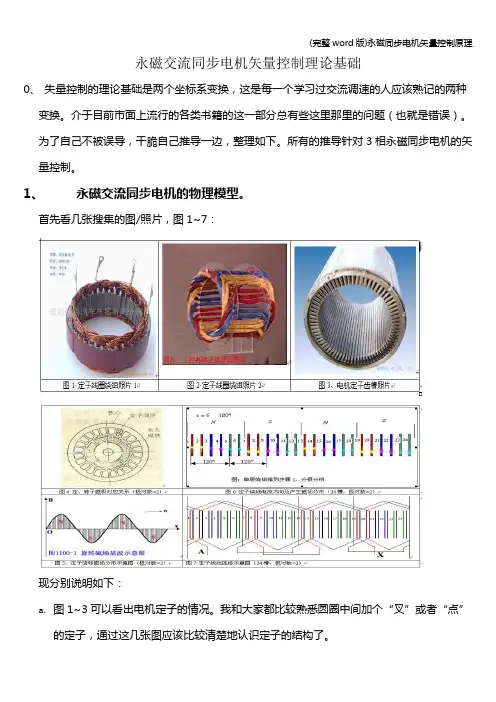
首先看几张搜集的图/照片,图1~7:现分别说明如下:a.图1~3可以看出电机定子的情况。
我和大家都比较熟悉圆圈中间加个“叉”或者“点”的定子,通过这几张图应该比较清楚地认识定子的结构了。
b.图1中留出4个抽头,其中一个应该是中线,但是,在伺服用的永磁同步电机,只连接3根线的。
c.图2是一个模型,红蓝黄三色代表三相绕组,在定子齿槽中上下穿梭,形成回路的。
d.定子绕线连接可以从图7很清楚地看到,从A进入开始,分别经过1(上),7(下),2(上),8(下),14(上),8(下),13(上),7(下),13(上),19(下),14(上),20(下),2(上),20(下),1(上),19(下)然后到X。
一相绕组经过8个齿槽,占全部齿槽的1/3,每个齿槽过两次,但每次方向是相同的。
最后上上下下的方向如同图6所示。
e.三相绕组通电后,形成如同图6所示的电流分布,每相邻的6根是电流同方向的。
这样,如果把1和24像纸的里面拉,将这一长排围城一个圆,则,1和7之间向里形成N(磁力线出)极的中心,12和13之间形成S(磁力线入)极的中心。
这里,个人认为图6中的N、S分段有些错误,中心偏移了,不知道是不是理解错误,欢迎指正,这图是我找的,不是我画的,版权不属我:)。
f.同极磁场的分布有中心向两侧减弱的,大家都说是正弦分布,我是没分析过,权且认同吧,如图5所示。
g.如图1同步电机的运转就是通过旋转定子磁场,转子永磁磁极与定子的磁极是对应的N、S相吸,可以同步地运行。
h.实际电机定子槽数较多,绕线方式也有不同。
旋转磁场的旋转是通过如图6中的一个磁极6个齿槽一起向右/左侧移位2、永磁同步电机数学模型这才是本文的重点。


永磁同步电机控制器工作原理永磁同步电机控制器是一种利用磁场相互作用来实现电力传递与转换的电气设备。
它主要应用于工业自动化、电力传输、交通运输等领域,具有高效性、精度高、可靠性好等优点。
永磁同步电机控制器是通过三相源供电并通过三相电桥进行电流控制,来控制永磁同步电机的转速所产生的控制器。
控制器的输出是通过功率放大器驱动电机,同时通过反馈电路获取电机的状态信息,比如电机的速度、转子位置和励磁磁场的磁通量等。
永磁同步电机的数学模型永磁同步电机的数学模型是用于模拟电机动态特性和控制策略的工具。
电机的转速和磁场磁通量是该模型中的重要变量。
控制器能够读取电机的编码器数据,以反馈电机的转子位置,并计算电机的转子位置和速度。
永磁同步电机控制器的工作原理是利用控制器来操控三相电源和磁场,从而控制永磁同步电机的转速。
下面详细分析控制器的各个方面。
感应电流的控制永磁同步电机控制器采用电流控制技术来控制感应电流的大小和方向。
感应电流是电机的旋转动能的主要来源。
电机内部的感应电流是由三相电源通过电桥产生的。
感应电流的大小和方向由控制器中的反馈电路和比较器来控制。
控制磁通量的强度永磁同步电机控制器可以控制励磁磁场的强度,从而控制电机的转矩和运行状态。
励磁磁场的强度是由直流电源来提供的。
直流电源的输出电压可以通过控制电路进行调整。
励磁磁场的磁通量强度是由磁通量传感器来测量的。
控制器能够通过分析磁通量传感器的输出来获取永磁同步电机的运行状态。
控制器的逆变器永磁同步电机的控制器中的逆变器是将直流电压转换为交流电压的关键部分。
逆变器通过三相正弦信号来控制电机的移动和加速,其中正弦信号的频率和幅值由控制器来控制。
逆变器的输出波形需要与永磁同步电机的特性相匹配,以确保电机能够工作在最佳的效率下。
总结永磁同步电机控制器通过三相桥电路和逆变器来控制直流电机的速度。
控制器的输出是通过功率放大器驱动电机,并通过反馈电路获取电机的状态信息。
这些信息包括电机的速度、转子位置和励磁磁场的磁通量等。

电流1学习标准GB/T18488 •GB 14023采用PMSM采用PMSM电动机与驱动系统是电动汽车的关键部件,要使电动汽车有良好的使用性能,驱动电机应具有:•调速范围宽•转速高•起动转矩大•体积小、质量小•效率高电机控制器也应体积小,功率密度高,工作温度范围宽,高可靠性,电磁兼容性能好。
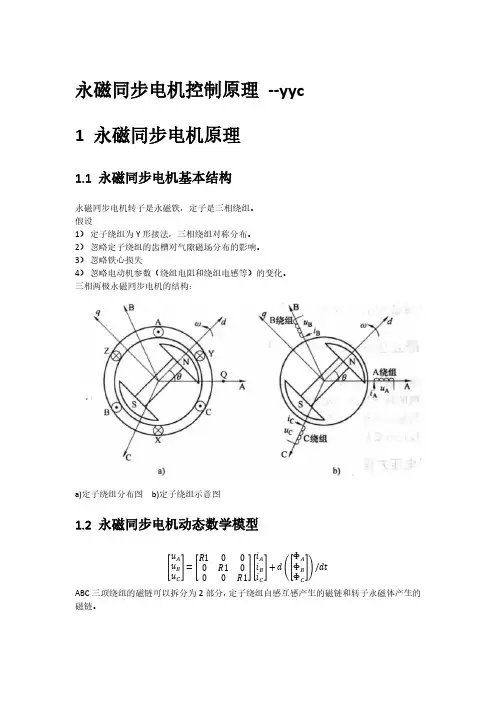
3PMSM的作用与特点•电能与机械能的转换:双向可控、高精度、高效率、快速转换4PMSM结构•定子、转子(旋转变压器)•定子绕组•定子绕组•永磁体•旋转变压器•旋转变压器•定子加工流程转子铁心XN Si CC绕组N Si CC绕组•1)定子绕组Y形接法,三相绕组对称分布,各绕组轴线在空间互差120º;转子上的永磁体在定转子气隙内产生主磁场(对于PMSM,该磁场沿气隙圆周呈正弦分布;对于BLDCM,该磁场沿气隙圆周呈梯形波分布),转子没有阻尼绕组;•2)忽略定子绕组的齿槽对气隙磁场分布的影响;•3)假设铁芯的磁导率是无穷大,忽略定子铁心与转子铁心的涡流损耗和磁滞损耗;•4)忽略电机参数(绕组电阻与绕组电感等)的变化。
8PMSM特性曲线•电流极限圆•电压极限圆(椭圆)•恒转矩曲线•MTPA曲线e p d q q d p qf d q de1e21.5()1.5T n i i n i L L i T T f e1p q fe2p d q d q1.51.5T n i T n L L i i重新列写永磁同步电机在dq 转子坐标系中的转矩公式,如下: (12-1)从中可以看出电机转矩分为两个部分,其一为永磁体产生的磁链与定子电流转矩分量i q 作用后产生的永磁转矩T e1,其二为转子的凸极结构使得定子电流励磁分量i d 与转矩分量i q 产生的磁阻转矩T e2。
(12-2)•控制id、iq的重要性4•id=0 控制;•最大转矩/电流控制;•控制cosφ =1;•恒磁链控制;•弱磁控制;•最大输出功率控制。