接触网补偿装置a、b值的计算
- 格式:ppt
- 大小:591.50 KB
- 文档页数:3
接触网常用计算公式目录1、平均温度t p和链形悬挂无弛度温度t o的计算 (2)2、当量跨距计算公式…………………………………………………3、定位肩架高度B的计算公式………………………………………4、接触线拉出值a地的计算公式…………………………………………5、接触线定位拉出值变化量Δa max的计算公式………………………6、定位器无偏移时拉出值a15的确定…………………………………7、定位器坡度1/X的确定………………………………………………8、吊弦间距的计算公式………………………………………………9、吊弦、定位、限制管偏移值计算公式…………………………10、半补偿链形悬挂中心锚结线夹处导线高度Hzx的确定………11、补偿器a、b值的计算公式………………………………………12、下锚拉线长度计算公式…………………………………………13、曲线水平力P RC和P RJ的计算公式………………………………14、直线定位之字力P之的计算公式…………………………………15、承力索弛度的测量计算公式…………………………………16、空气绝缘间隙的计算公式…………………………………………17、吊弦长度计算公式………………………………………………18、横向承力索分段长度的计算………………………………………19、横向承力索修正长度的计算………………………………………20、外轨超高h的计算公式…………………………………………1.平均温度t p和链形悬挂无弛度温度t o的计算t max+t min①t p=2t max+t min②t o弹= -52t max+t min③t o简= -102式中t p—平均温度℃(即吊弦、定位处于无偏移状态的温度);t o弹、t o简—分别表示弹性链形悬挂和简单链形悬挂的无弛度温度℃;t max—设计最高温度℃;t min—设计最低温度℃;2.当量跨距计算公式n∑L I3LD= i=1n∑L I√i=1式中L D—锚段当量跨距(m);n∑L I3=(L13+ L23+……+ L n3)—锚段中各跨距立方之和;i=1n∑L I=(L1+ L2+……+ L n)—锚段中各跨距之和;i=13.定位肩架高度B的计算公式B≈H+e+I(h/d+1/10)h/2式中B—肩架高度(mm);H—定位点处接触线高度(mm);e—支持器有效高度(mm);I—定位器有效长度(包括绝缘子)(mm);d—定位点处轨距(mm);h—定位点外轨超高(mm);4.接触线拉出值a地的计算公式Ha地=a-hd式中a地—拉出值标准时,导线垂直投影与线路中心线的距离(mm)。


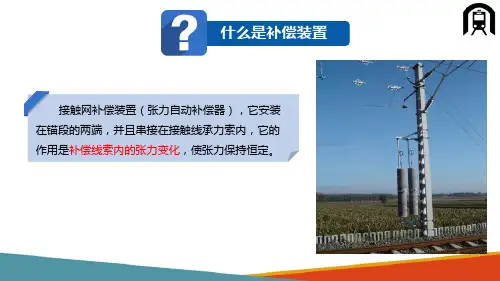
一、接触网补偿装置1.接触网补偿装置定义接触网补偿装置,又称张力自动补偿器,是指自动调整接触线和承力索张力的补偿器及其断线制动装置的总称。
其安装在锚段的两端,并且串接在接触线、承力索内。
2.补偿装置作用补偿装置的作用是补偿线索内的张力变化,在长度变化(温度引起)后尽量使接触悬挂中的张力及接触线的位置保持基本恒定。
当温度变化时,线索受温度影响而伸长或缩短,由于补偿装置(坠砣)的作用,使线索顺线路方向移动而自动调整线索的张力并借以保持线索的弛度使之符合规定,从而保证接触线悬挂的技术状态。
3.补偿装置的分类接触网补偿装置的种类有:滑轮式、棘轮式、鼓轮式、液压式、气体式、机电张力补偿装置、杠杆式及弹簧式等。
4.补偿装置技术要求对补偿装置的技术要求有一是要灵活;二是要具有快速制动作用。
二、滑轮式补偿装置图2-7-1 滑轮式补偿装置结构图1.主要组成部分滑轮式补偿装置的补偿器由补偿滑轮(滑轮组)、补偿绳、杵环杆、坠坨杆、坠坨块及连接零件组成,见图2-7-1。
(1)补偿滑轮及补偿绳①补偿滑轮补偿滑轮分为定滑轮和动滑轮,定滑轮改变受力方向,动滑轮除改变受力方向外还可省力和移动位置。
补偿滑轮是滑轮补偿装置的核心设备,一般由铝合金铸造而成,由滑轮组、不锈钢丝绳、连接框架及双耳楔形线夹组成,备有1:2(一动、一定),1:3(一动、两定),1:4(两动、两定)三种规格,可满足不同张力要求。
补偿滑轮的传动效率直接影响补偿装置的性能,其传动效率应在98%以上。
②补偿绳补偿绳由不锈钢丝绳制成,其最大工作荷重:1:2型为12kN,1:3型为18kN,1:4型为22kN。
(2)坠砣及坠砣杆坠砣块一般采用混凝土或灰口铸铁制成,每块约重25kg,重量误差不大于3%,呈中间开口的圆饼状。
2.补偿装置的安设与要求补偿装置串联在锚段内线索两端与支柱固定处,根据接触悬挂类型的不同要求补偿装置有不同的结构。
①半补偿时,接触线带补偿器,多采用两滑轮组结构,滑轮组的传动比为1:2,即坠砣块的重力为接触线标称张力的一半。
接触网常用计算公式接触网常用计算公式1. 平均温度t p 和链形悬挂无弛度温度t o 的计算① 2t t tp min max += ② 5-2t t t min max o +=弹 ③ 10-2t t t min max o +=简 式中 t p —平均温度℃(即吊弦、定位处于无偏移状态的温度);t o 弹、t o 简—分别表示弹性链形悬挂和简单链形悬挂的无弛度温度℃;t max —设计最高温度℃;t min —设计最低度℃;2. 当量跨距计算公式∑∑===n i In i I LLLD 113 式中L D —锚段当量跨距(m );).........(3323113n n i I L L L L+++=∑=—锚段中各跨距立方之和; ).........(211n n i I L L L L+++=∑=—锚段中各跨距之和;3. 定位肩架高度B 的计算公式2)101 +(hd h Ie H B ++≈ 式中 B —肩架高度(mm );H —定位点处接触线高度(mm );e —支持器有效高度(mm );I —定位器有效长度(包括绝缘子)(mm );d —定位点处轨距(mm );h —定位点外轨超高(mm );4. 接触线拉出值a 地的计算公式h dH a a -=地 式中 a 地—拉出值标准时,导线垂直投影与线路中心线的距离(mm )。
a 地为正时导线的垂直投影应在线路的超高侧,a 地为负时导线的垂直投影应在线路的低轨侧。
H —定位点接触线的高度(mm );a —导线设计拉出值(mm );h —外轨超高(mm );d —轨距(mm );5. 接触线定位拉出值变化量m ax a ∆的计算公式2max 2max E I I a z z --=∆式中 Δa max —定位点拉出值的最大变化量(mm );Z L —定位装置(受温度影响)偏转的有效长度(mm );max E —极限温度时定位器的最大偏移值(mm );由上式可知 E=0时 Δa=06. 定位器无偏移时拉出值a 15的确定:(取平均温度t p =15℃)max 2115a a a ∆±= 式中 a —导线设计拉出值(mm );Δa max —定位点拉出值的最大变化量(mm );15a —定位器无偏移时(即平均温度时)的拉出值(mm )。
接触网常用计算公式接触网常用计算公式1. 平均温度t p 和链形悬挂无弛度温度t o 的计算① 2t t tp min max += ② 5-2t t t min max o +=弹 ③ 10-2t t t min max o +=简 式中 t p —平均温度℃(即吊弦、定位处于无偏移状态的温度);t o 弹、t o 简—分别表示弹性链形悬挂和简单链形悬挂的无弛度温度℃;t max —设计最高温度℃;t min —设计最低度℃;2. 当量跨距计算公式∑∑===n i In i I LLLD 113 式中L D —锚段当量跨距(m );).........(3323113n n i I L L L L+++=∑=—锚段中各跨距立方之和; ).........(211n n i I L L L L+++=∑=—锚段中各跨距之和;3. 定位肩架高度B 的计算公式2)101 +(hd h Ie H B ++≈ 式中 B —肩架高度(mm );H —定位点处接触线高度(mm );e —支持器有效高度(mm );I —定位器有效长度(包括绝缘子)(mm );d —定位点处轨距(mm );h —定位点外轨超高(mm );4. 接触线拉出值a 地的计算公式h dH a a -=地 式中 a 地—拉出值标准时,导线垂直投影与线路中心线的距离(mm )。
a 地为正时导线的垂直投影应在线路的超高侧,a 地为负时导线的垂直投影应在线路的低轨侧。
H —定位点接触线的高度(mm );a —导线设计拉出值(mm );h —外轨超高(mm );d —轨距(mm );5. 接触线定位拉出值变化量m ax a ∆的计算公式2max 2max E I I a z z --=∆式中 Δa max —定位点拉出值的最大变化量(mm );Z L —定位装置(受温度影响)偏转的有效长度(mm );max E —极限温度时定位器的最大偏移值(mm );由上式可知 E=0时 Δa=06. 定位器无偏移时拉出值a 15的确定:(取平均温度t p =15℃)max 2115a a a ∆±= 式中 a —导线设计拉出值(mm );Δa max —定位点拉出值的最大变化量(mm );15a —定位器无偏移时(即平均温度时)的拉出值(mm )。