Ch06 典型机电控制系统仿真实例
- 格式:pdf
- 大小:1004.40 KB
- 文档页数:63
机电控制系统仿真报告
机电控制系统仿真报告
1. 引言
机电控制系统是由机械设备和电气控制系统组成的一种复杂系统。
为了提高机电控制系统的性能和效率,我们选择了仿真方法来验证和优化控制参数。
本报告将介绍我们仿真的研究内容和结果。
2. 研究内容
我们选取了一个典型的机电控制系统——直流电机驱动的位置控制系统作为研究对象。
该系统由直流电机、编码器、驱动器和控制器组成。
我们主要研究了位置控制器参数的选择和电机转速的响应。
3. 研究方法
为了仿真该机电控制系统,我们使用了MATLAB/Simulink软件工具。
该工具提供了丰富的模块库和仿真环境,可以方便地搭建机电控制系统模型并进行仿真分析。
4. 研究结果
我们首先选择了几组不同的位置控制器参数进行仿真。
通过对比不同参数下系统的响应曲线,我们发现某些参数组合能够显著提高系统的稳定性和响应速度。
接着,我们分别改变电机输入端的转矩和负载惯量,观察电机转速的响应情况。
仿真结果显示,在一定范围内,电机的转速与负载情况呈线性关系,并且转矩越大,转速越慢。
5. 结论与展望
通过仿真分析,我们得出了一些结论:合理选择位置控制器参数可以改善机电控制系统的性能;电机转速与负载情况呈线性关系。
未来,我们将进一步完善仿真模型,探索其他因素对机电控制系统的影响,并通过仿真优化参数和控制策略,进一步提升系统的性能。
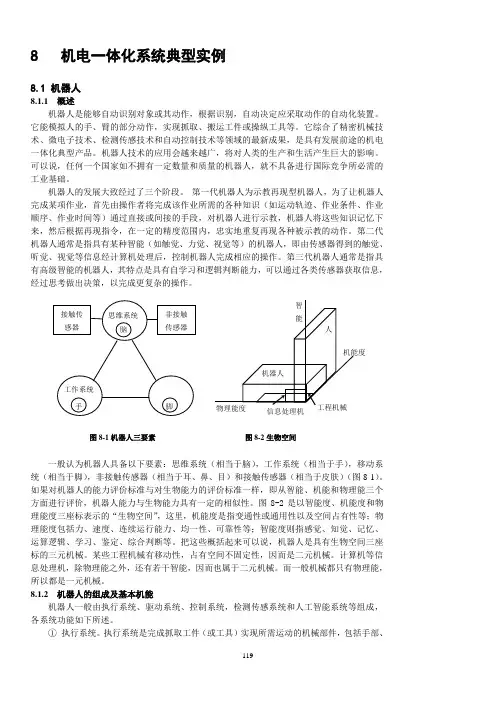
1198 机电一体化系统典型实例8.1 机器人8.1.1 概述机器人是能够自动识别对象或其动作,根据识别,自动决定应采取动作的自动化装置。
它能模拟人的手、臂的部分动作,实现抓取、搬运工件或操纵工具等。
它综合了精密机械技术、微电子技术、检测传感技术和自动控制技术等领域的最新成果,是具有发展前途的机电一体化典型产品。
机器人技术的应用会越来越广,将对人类的生产和生活产生巨大的影响。
可以说,任何一个国家如不拥有一定数量和质量的机器人,就不具备进行国际竞争所必需的工业基础。
机器人的发展大致经过了三个阶段。
第一代机器人为示教再现型机器人,为了让机器人完成某项作业,首先由操作者将完成该作业所需的各种知识(如运动轨迹、作业条件、作业顺序、作业时间等)通过直接或间接的手段,对机器人进行示教,机器人将这些知识记忆下来,然后根据再现指令,在一定的精度范围内,忠实地重复再现各种被示教的动作。
第二代机器人通常是指具有某种智能(如触觉、力觉、视觉等)的机器人,即由传感器得到的触觉、听觉、视觉等信息经计算机处理后,控制机器人完成相应的操作。
第三代机器人通常是指具有高级智能的机器人,其特点是具有自学习和逻辑判断能力,可以通过各类传感器获取信息,经过思考做出决策,以完成更复杂的操作。
一般认为机器人具备以下要素:思维系统(相当于脑),工作系统(相当于手),移动系统(相当于脚),非接触传感器(相当于耳、鼻、目)和接触传感器(相当于皮肤)(图8-1)。
如果对机器人的能力评价标准与对生物能力的评价标准一样,即从智能、机能和物理能三个方面进行评价,机器人能力与生物能力具有一定的相似性。
图8-2是以智能度、机能度和物理能度三座标表示的“生物空间”,这里,机能度是指变通性或通用性以及空间占有性等;物理能度包括力、速度、连续运行能力、均一性、可靠性等;智能度则指感觉、知觉、记忆、运算逻辑、学习、鉴定、综合判断等。
把这些概括起来可以说,机器人是具有生物空间三座标的三元机械。
控制系统仿真实验报告(总19页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除昆明理工大学电力工程学院学生实验报告实验课程名控制系统仿真实验称:开课实验室:计算中心2082015 年 6月 16日实验一电路的建模与仿真一、实验目的1、了解KCL 、KVL 原理;2、掌握建立矩阵并编写M 文件;3、调试M 文件,验证KCL 、KVL ;4、掌握用simulink 模块搭建电路并且进行仿真。
二、实验内容电路如图1所示,该电路是一个分压电路,已知13R =Ω,27R =Ω,20S V V =。
试求恒压源的电流I 和电压1V 、2V 。
IVSV 1V 2图1三、列写电路方程(1)用欧姆定律求出电流和电压 (2)通过KCL 和KVL 求解电流和电压(1) I=Vs/(R1+R2)=2A , V1=I*R1 =6V , V2=I*R2=14V (2) I*R1+I*R2-Vs=0 , V1=I*R1 , V2=I*R2 ,=> I=2A,V1=6V,V2=14V.四、编写M 文件进行电路求解(1)M文件源程序(2)M文件求解结果(1)M文件源程序R1=3;R2=7;Vs=20;I=Vs/(R1+R2)V1=I*R1V2=Vs-V1(2)M文件求解结果I=2V1=6V2=14五、用simulink进行仿真建模(1)给出simulink下的电路建模图(2)给出simulink仿真的波形和数值电流I波形I=2A电压U1波形,U1=6V电压U2波形,U2=14V六、结果比较与分析根据M文件编程输入到matlab中,实验结果与理论计算结果一致。
实验二 数值算法编程实现一、实验目的掌握各种计算方法的基本原理,在计算机上利用MATLAB 完成算法程序的编写拉格朗日插值算法程序,利用编写的算法程序进行实例的运算。
二、实验说明1.给出拉格朗日插值法计算数据表;2.利用拉格朗日插值公式,编写编程算法流程,画出程序框图,作为下述编程的依据;3.根据MATLAB 软件特点和算法流程框图,利用MATLAB 软件进行上机编程; 4.调试和完善MATLAB 程序;5.由编写的程序根据实验要求得到实验计算的结果。

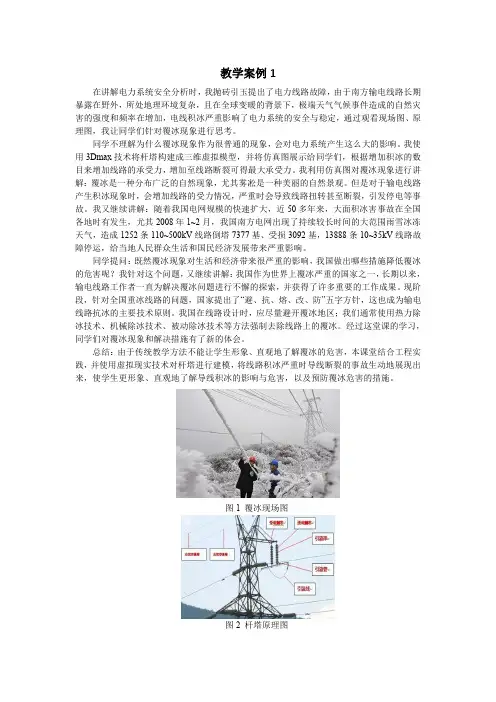
教学案例1在讲解电力系统安全分析时,我抛砖引玉提出了电力线路故障,由于南方输电线路长期暴露在野外,所处地理环境复杂,且在全球变暖的背景下,极端天气气候事件造成的自然灾害的强度和频率在增加,电线积冰严重影响了电力系统的安全与稳定,通过观看现场图、原理图,我让同学们针对覆冰现象进行思考。
同学不理解为什么覆冰现象作为很普通的现象,会对电力系统产生这么大的影响。
我使用3Dmax技术将杆塔构建成三维虚拟模型,并将仿真图展示给同学们,根据增加积冰的数目来增加线路的承受力,增加至线路断裂可得最大承受力。
我利用仿真图对覆冰现象进行讲解:覆冰是一种分布广泛的自然现象,尤其雾凇是一种美丽的自然景观。
但是对于输电线路产生积冰现象时,会增加线路的受力情况,严重时会导致线路扭转甚至断裂,引发停电等事故。
我又继续讲解:随着我国电网规模的快速扩大,近50多年来,大面积冰害事故在全国各地时有发生,尤其2008年1~2月,我国南方电网出现了持续较长时间的大范围雨雪冰冻天气,造成1252条110~500kV线路倒塔7377基、受损3092基,13888条10~35kV线路故障停运,给当地人民群众生活和国民经济发展带来严重影响。
同学提问:既然覆冰现象对生活和经济带来很严重的影响,我国做出哪些措施降低覆冰的危害呢?我针对这个问题,又继续讲解:我国作为世界上覆冰严重的国家之一,长期以来,输电线路工作者一直为解决覆冰问题进行不懈的探索,并获得了许多重要的工作成果。
现阶段,针对全国重冰线路的问题,国家提出了“避、抗、熔、改、防”五字方针,这也成为输电线路抗冰的主要技术原则。
我国在线路设计时,应尽量避开覆冰地区;我们通常使用热力除冰技术、机械除冰技术、被动除冰技术等方法强制去除线路上的覆冰。
经过这堂课的学习,同学们对覆冰现象和解决措施有了新的体会。
总结:由于传统教学方法不能让学生形象、直观地了解覆冰的危害,本课堂结合工程实践,并使用虚拟现实技术对杆塔进行建模,将线路积冰严重时导线断裂的事故生动地展现出来,使学生更形象、直观地了解导线积冰的影响与危害,以及预防覆冰危害的措施。