机电一体化系统设计典型实例共58页文档
- 格式:ppt
- 大小:5.50 MB
- 文档页数:58

机电一体化系统设计课程设计说明书(小幅面平板式二维绘图仪画笔驱动系统)目录目录................................................................................................................... - 2 - 中文摘要................................................................................................................... - 4 -一、课程设计的目的............................................................................................... - 5 -二、设计任务........................................................................................................... - 5 -三、总体方案的确定............................................................................................... - 5 -四、机械传动部件的设计与选型........................................................................... - 6 -1.滚珠丝杆副的选型与计算........................................................................... - 6 - 2.电机的选型与计算....................................................................................... - 8 -3、轴承的选择与验算..................................................................................... - 11 -4.联轴器的选用............................................................................................. - 12 - 5.滚动直线导轨选择,计算和验算................................................................ - 12 - 6.密封和润滑................................................................................................. - 13 -五、机械控制系统原理及电路设计..................................................................... - 13 -1、设计要求..................................................................................................... - 13 -2、方案分析..................................................................................................... - 13 -3、单片机系统与步进电动机驱动器之间的接口方法................................. - 14 -4、步进电动机驱动电源的选用..................................................................... - 15 -六、设计结论......................................................................................................... - 18 -七、个人总结......................................................................................................... - 21 -八、参考文献......................................................................................................... - 22 -中文摘要模块化的小幅面平板式单坐标画笔驱动系统,通常由导轨座、移动滑块、工作平台、滚珠丝杠副,以及伺服电动机等部件组成。
1198 机电一体化系统典型实例8.1 机器人8.1.1 概述机器人是能够自动识别对象或其动作,根据识别,自动决定应采取动作的自动化装置。
它能模拟人的手、臂的部分动作,实现抓取、搬运工件或操纵工具等。
它综合了精密机械技术、微电子技术、检测传感技术和自动控制技术等领域的最新成果,是具有发展前途的机电一体化典型产品。
机器人技术的应用会越来越广,将对人类的生产和生活产生巨大的影响。
可以说,任何一个国家如不拥有一定数量和质量的机器人,就不具备进行国际竞争所必需的工业基础。
机器人的发展大致经过了三个阶段。
第一代机器人为示教再现型机器人,为了让机器人完成某项作业,首先由操作者将完成该作业所需的各种知识(如运动轨迹、作业条件、作业顺序、作业时间等)通过直接或间接的手段,对机器人进行示教,机器人将这些知识记忆下来,然后根据再现指令,在一定的精度范围内,忠实地重复再现各种被示教的动作。
第二代机器人通常是指具有某种智能(如触觉、力觉、视觉等)的机器人,即由传感器得到的触觉、听觉、视觉等信息经计算机处理后,控制机器人完成相应的操作。
第三代机器人通常是指具有高级智能的机器人,其特点是具有自学习和逻辑判断能力,可以通过各类传感器获取信息,经过思考做出决策,以完成更复杂的操作。
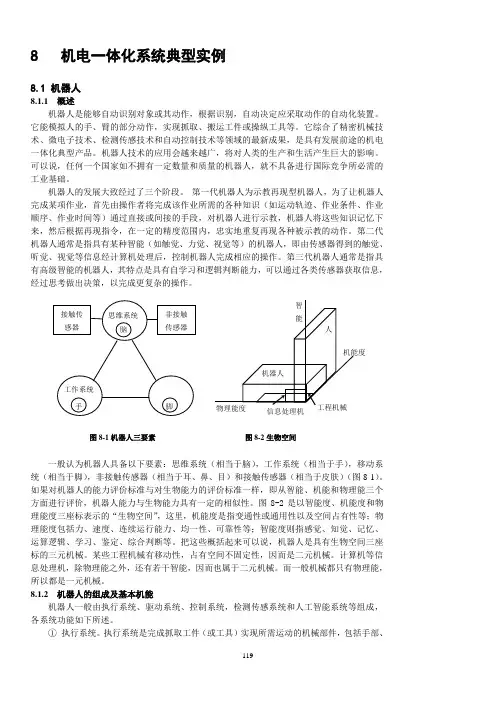
一般认为机器人具备以下要素:思维系统(相当于脑),工作系统(相当于手),移动系统(相当于脚),非接触传感器(相当于耳、鼻、目)和接触传感器(相当于皮肤)(图8-1)。
如果对机器人的能力评价标准与对生物能力的评价标准一样,即从智能、机能和物理能三个方面进行评价,机器人能力与生物能力具有一定的相似性。
图8-2是以智能度、机能度和物理能度三座标表示的“生物空间”,这里,机能度是指变通性或通用性以及空间占有性等;物理能度包括力、速度、连续运行能力、均一性、可靠性等;智能度则指感觉、知觉、记忆、运算逻辑、学习、鉴定、综合判断等。
把这些概括起来可以说,机器人是具有生物空间三座标的三元机械。
江西机电职业技术学院毕业设计设计课题___________________________ 系部___________________________ 专业___________________________ 班级___________________________ 姓名___________________________ 学号___________________________ 指导老师___________________________ 任务书发给日期______________________ 预定完成日期________________________课程设计完成的技术文件1.课题的目的和意义 (1)2.课题任务的控制要求 (2)3.PLC外部硬件连接图 (2)4.输入输出点地址分配 (4)5.梯形图程序 (5)5.1符号表 (5)5.2梯形图 (6)6.指令语句表 (12)7.模拟调试的过程和出现问题的分析 (16)7.1系统调试及解决的问题 (16)7.2结果分析 (16)8.调试程序所用的试验设备 (17)9.设计体会 (20)10. 参考文献 (21)自动售货机的模拟控制1.课题的目的和意义PLC的发展与计算机技术、半导体技术、控制技术、数字技术、通信网络技术等高新技术的发展息息相关,这些高新技术的发展推动了PLC的发展,而PLC 得发展又对这些高新技术提出了更高更新的要求,促进了他们的发展。
本次设计就在于结合PLC的种种优点联系实际情况来弥补原有系统的不足,利用PLC控制的自动售货机提高了系统的稳定性,保证了自动售货机能够长期稳定的运行。
自动售货机能够充分补充人力资源的不足,适应消费环境和消费模式的变化,可以更省力,运营时需要的资本少、面积小,有吸引人们购买好奇心的自身性能,可以很好地解决人工费用上升的问题等各项优点。
很多城市的公共场所里面都放置有自动售货机。
出售的商品五花八门,从饮料、零食、香烟、糖果、方便面、照相机等。