自动飞行控制系统介绍
- 格式:ppt
- 大小:1.46 MB
- 文档页数:92
航空业中的智能飞行控制系统的使用说明随着科技的不断进步和航空工业的发展,智能飞行控制系统已经成为现代航空业中必不可少的一部分。
它不仅提供了更高的飞行安全性,还大大提高了飞行效率和乘客的舒适度。
本文将详细介绍智能飞行控制系统的使用方法和相关注意事项,旨在帮助相关人员更好地掌握和应用该技术。
一、智能飞行控制系统的定义和组成智能飞行控制系统,简称IFCS(Intelligent Flight Control System),是一种基于先进的计算机技术和传感器系统的自动化飞行控制系统。
它由飞行管理计算机、飞行控制计算机、数据接口单元以及相关传感器系统等组成。
二、智能飞行控制系统的使用方法1. 初始化系统在启动航班之前,首先需要进行IFCS的初始化设置。
按照系统提供的操作手册,正确设置飞行计划、飞行航线、起降机场等相关参数,确保系统能够准确地进行飞行控制和导航。
2. 检查传感器IFCS使用了多种传感器进行数据采集和实时监测,如惯性测量单元(IMU)、气压计、全球卫星导航系统(GNSS)以及雷达等。
在飞机准备起飞前,必须对这些传感器进行全面检查,确保其正常运行。
如有异常,需要及时修复或更换传感器。
3. 操作界面IFCS提供了多种不同的操作界面,供驾驶员和地面操作人员使用。
常见的操作界面包括驾驶舱内的显示屏和飞控操作手柄,以及地面操作室的操作台。
根据具体任务和需求,选择合适的操作界面,并熟悉操作方法。
4. 航路规划和飞行控制IFCS具备先进的航路规划和飞行控制功能。
在飞行前,通过输入相关信息和目标航线,系统可以自动计算最佳航路和飞行速度,确保飞机在有效范围内进行最有效率的航行。
驾驶员需要熟悉如何输入相关参数,并根据实际需求对系统进行合理的调整。
5. 自动驾驶模式IFCS提供了自动驾驶模式,能够在飞行过程中自主地进行飞行控制。
在自动驾驶模式下,系统能够根据传感器数据和预设参数实现自动起飞、巡航、降落等功能。
然而,在自动驾驶模式下,驾驶员仍需保持警觉,随时监控系统的工作情况,并做出必要的干预。
飞行器自动控制系统设计一、引言飞行器自动控制系统设计作为飞行器控制领域的重要组成部分,是保证飞行器安全飞行的核心技术之一。
随着科技发展,飞行器的种类和技术水平不断提升,自动控制系统也不断更新升级。
本文将从控制系统设计的角度出发,探讨飞行器自动控制系统设计的原理和方法,为读者深入了解该领域提供参考。
二、飞行器自动控制系统概述1. 自动控制系统概述自动控制系统是指通过电、机、液、气等能量传递和转换来实现对被控制对象的控制。
自动控制系统通常由传感器、执行器、控制器三个部分构成。
传感器负责采集被控制量,将其转化成电信号,通过控制器对执行器进行控制,实现对被控制对象的控制。
自动控制系统在飞行器控制系统中扮演着重要的角色。
2. 飞行器控制系统概述飞行器控制系统是指通过自动控制系统实现对飞行器的控制,以保证其安全、稳定地飞行。
飞行器控制系统包括水平方向控制系统、垂直方向控制系统、机载导航系统等。
3. 飞行器自动控制系统概述飞行器自动控制系统是指无需人工干预即可实现对飞行器的控制。
其主要由传感器、执行器、控制器三部分组成。
飞行器自动控制系统广泛应用于航空、航天、军事等领域。
三、飞行器自动控制系统设计原理和方法1. 飞行器动力学原理飞行器动力学原理是设计自动控制系统的基础。
在飞行器设计过程中,需要确定飞行器的结构参数和抗扰能力等指标,以此确定各个部件的位置、尺寸和分布。
此外,还需要确定控制系统的控制环节和控制策略,以此保证飞行器的稳定性和可控性。
2. 控制系统设计方法控制系统设计方法主要包括PID控制器设计、状态空间控制器设计和模糊控制器设计等。
PID控制器是最为常见的控制器之一,其能够快速响应控制量变化、具有良好的稳定性和鲁棒性。
状态空间控制器设计是指将控制系统用状态空间方程描述,然后针对特定的控制目标进行设计,具有良好的精度和可靠性。
模糊控制器设计是指将其控制逻辑用模糊集合表示,并根据飞行器的实际情况进行设计,具有较好的复杂环境适应能力。
飞行器自动控制系统的设计与实现飞行器自动控制系统是现代飞行器中至关重要的一部分,它能够确保飞行器在飞行过程中保持稳定、安全、高效。
本文将重点探讨飞行器自动控制系统的设计与实现。
一、飞行器自动控制系统概述飞行器自动控制系统是指利用电子控制硬件和软件,配合传感器和执行器,通过对飞机舵面、发动机油门和推进器等部件进行控制,使飞行器能够自主飞行、导航、保持高度和航向等多种功能的一套综合性系统。
在飞行器自动控制系统中,有重要的三个控制环:导航环、姿态环和动力环。
导航环主要负责路径规划、导航计算和导航指令生成;姿态环主要负责姿态控制,包括飞机的俯仰角、偏航角和滚转角;动力环则主要负责发动机推力控制和飞机的加速度控制。
二、飞行器自动控制系统的设计在飞行器自动控制系统的设计过程中,需要完成如下几个步骤:1. 系统需求分析在设计飞行器自动控制系统之前,首先需要全面分析和了解飞机的基本性能参数和运行特点,设定系统的功能需求和性能指标,进而确定系统的控制策略和实现方案。
2. 系统框架设计在需求分析的基础上,需要进行系统框架的设计,包括系统的硬件架构和软件架构。
硬件架构主要包括传感器、执行器和控制器等硬件设备的选型和组合;软件架构则主要包括控制算法的设计和实现、飞行器状态估计和滤波等软件模块的分析与设计。
3. 仿真和验证在进行实际飞行之前,需要先进行仿真和验证。
通过仿真,可以验证系统的设计和控制算法是否符合预期的要求;通过实测验证,可以检测到系统设计和控制策略的缺陷和不足,及时改进。
三、飞行器自动控制系统的实现在完成系统设计之后,需要进行系统实现。
飞行器自动控制系统的实现主要包括对控制算法、传感器和执行器等硬件设备的编程和调试,以及整个系统的测试和验证。
1. 控制算法的编程和调试在设计控制算法之后,需要对算法进行编程和调试。
控制算法需要根据飞行器的运行状态和环境变化来调整控制参数,以达到控制飞行器的稳定性和精确性。
2. 传感器和执行器的编程和调试传感器和执行器是飞行器自动控制系统的重要部分,它们负责收集和反馈飞行器状态信息和执行控制指令。
第一章飞行控制系统概述1.1飞行器自动控制1.1.1飞行控制系统的功能随着飞行任务的不断复杂化,对飞机性能的要求越来越高,不仅要求飞行距离远(例如运输机),高度高(高空侦察机),而且还要求飞机有良好的机动性(例如战斗机)。
为了减轻驾驶员在长途飞行中的疲劳,或使驾驶员集中精力战斗,希望用自动控制系统代替驾驶员控制飞行,并能改善飞机的飞行性能。
这种系统就是现代飞机上安装的飞行自动控制系统。
飞行控制系统的功能归结起来有两点:1)实现飞机的自动飞行;2)改善飞机的飞行性能。
飞机的自动飞行控制系统在无人参与的情况下,自动操纵飞机按规定的姿态和航迹飞行,通常可实现对飞机的三轴姿态角和飞机三个方向的空间位置的自动控制与稳定。
例如,无人驾驶飞行器(如无人机或导弹等),实现完全的飞行自动控制;对于有人驾驶的飞机(如民用客机或军用飞机),虽然有人参与驾驶,但某些飞行阶段(如巡航段),驾驶员可以不直接参与操纵,而由飞行控制系统实现对飞机飞行的自动控制,但驾驶员应完成对自动飞行指令的设置和监督自动飞行的情况,并可以随时切断自动控制而实现人工驾驶。
采用自动飞行具有以下优点:1)长距离飞行时解除驾驶员的疲劳,减轻驾驶员的工作负担;2)在一些恶劣天气或复杂的环境下,驾驶员难于精确控制飞机的姿态和航迹,自动飞行控制系统可以精确对飞机姿态和航迹的精确控制;3)有一些飞行操纵任务,驾驶员难于精确完成,如进场着陆,采用自动飞行控制则可以较好地完成任务。
一般来说,飞机的性能和飞行品质是由飞机本身气动特性和发动机特性决定的,但随着飞机飞行高度及飞行速度的增加,飞机的自身特性将会变坏。
如飞机在高空飞行时,由于空气稀薄,飞机的阻尼特性变坏,致使飞机角运动产生严重的摆动,靠驾驶员人工操纵将会很困难。
此外,设计飞机时,为了减小质量和阻力,提高有用升力,将飞机设计成静不稳定的。
对于这种静不稳定的飞机,驾驶员是难于操纵的。
在飞机上采用增稳系统或阻尼系统可以很好地解决这些问题。
飞行控制系统的组成飞行控制系统是指用于控制飞机飞行的一系列设备和程序。
它是飞机的重要组成部分,直接影响着飞机的操纵性、稳定性和安全性。
飞行控制系统的主要组成包括飞行操纵系统、飞行指示系统、飞行保护系统和自动飞行控制系统。
一、飞行操纵系统飞行操纵系统是飞行控制系统的核心部分,用于操纵飞机的姿态和航向。
它包括操纵杆、脚蹬和相关的机械传动装置。
操纵杆通过机械传动装置将飞行员的操作转化为飞机的姿态变化,从而实现对飞机的操纵。
脚蹬主要用于控制飞机的航向。
飞行操纵系统的设计需要考虑飞行员的操作感受和操作精度,以及飞机的动力特性和气动特性。
二、飞行指示系统飞行指示系统用于向飞行员提供飞机的状态和参数信息,以帮助飞行员准确地掌握飞机的飞行情况。
飞行指示系统包括人机界面设备和显示设备。
人机界面设备包括仪表板、显示器和按钮等,用于向飞行员显示飞机的状态和参数,并接收飞行员的操作指令。
显示设备一般采用液晶显示屏或投影显示技术,能够实时显示飞机的速度、高度、姿态、航向等信息。
飞行指示系统的设计需要考虑信息的清晰度和可读性,以及对飞行员的操作需求和反馈。
三、飞行保护系统飞行保护系统用于提供飞机的保护和安全功能,防止飞机发生失控或危险情况。
飞行保护系统包括防护装置、警告系统和应急措施。
防护装置主要包括防止飞机过载的装置、防止飞机超速的装置和防止飞机失速的装置等,能够保护飞机免受过载、超速和失速等不安全飞行状态的影响。
警告系统主要用于向飞行员提供飞机的警告和提示信息,以帮助飞行员及时发现和解决飞机的异常情况。
应急措施主要包括自动驾驶和自动下降等功能,能够在紧急情况下自动控制飞机的飞行。
四、自动飞行控制系统自动飞行控制系统是飞行控制系统的高级形式,能够实现自动驾驶和飞行管理功能。
自动飞行控制系统主要包括飞行管理计算机、自动驾驶仪和导航系统等。
飞行管理计算机负责计算飞机的飞行参数和航路信息,并根据飞行员的指令进行飞行计划和航线管理。
自动飞行控制系统介绍自动飞行控制系统是一种由计算机控制的系统,能够在飞行过程中自动控制飞机的飞行。
它使用一系列传感器和计算机算法来监控飞机的状态,并根据预先设定的参数和指令来控制飞机的航向、姿态、速度和高度等参数。
自动飞行控制系统具有提高飞行安全性、减少驾驶员工作负荷、提高飞行效率等优点,已经成为现代民航飞机的标配。
飞行管理系统是自动飞行控制系统的核心部分,它由飞行计算机、导航仪、航向仪、加速度仪等系统组件构成。
它通过获取飞机的位置、航向、速度、高度等信息,并根据预设的航线和飞行计划,计算出飞机应采取的飞行参数和指令。
飞行管理系统还可以根据空中交通管制和气象条件等变化,自动调整飞机的航线和高度,以保持安全和舒适的飞行状态。
电子持续应急系统是自动飞行控制系统的关键组成部分,它用来监控和检测系统或设备的故障,并采取相应的措施来解决问题。
例如,当飞机遇到重大故障或异常情况时,电子持续应急系统会发出警报,并通过自动调整飞机的姿态和航线来确保飞行安全。
电动副翼控制系统是一种用来控制飞机舵面的机械或电力装置。
它通过电动机或电动液压泵等驱动设备,实现对飞机副翼的精确控制。
电动副翼控制系统可以帮助飞机保持稳定的飞行姿态,在飞行过程中自动调整机翼的倾斜角度,以实现平稳的飞行。
自动飞行控制系统在实际飞行中发挥着重要的作用。
它可以减轻飞行员的工作负荷,使其能够更专注于监控飞行状态和处理突发情况。
它还可以增加飞行的安全性,通过计算机算法和传感器的准确性来减少人为误差,并及时做出针对飞机状态的调整。
自动飞行控制系统还可以提高飞行效率,通过优化飞机的航线和高度,减少飞机的燃料消耗和飞行时间。
总之,自动飞行控制系统是现代民航飞机的重要组成部分,它通过计算机控制和监控飞机的飞行状态,实现自动化的飞行控制。
它具有提高飞行安全性、减轻飞行员工作负荷、提高飞行效率等优点,已经成为现代民航飞机必备的装备。
随着科技的发展和创新,自动飞行控制系统将不断完善和提升,为飞行安全和效率带来更大的贡献。
空运飞行员的航空器的自动飞行控制系统自动飞行控制系统(Autopilot)是空运飞行员的航空器中一项关键的技术,它通过整合电子设备和计算机系统来实现航行过程中的自动化操作。
这一系统能够接收和处理飞机各个方面的信息,包括姿态、导航、引擎控制等,从而实现飞行员的部分或全部飞行任务的自动化。
本文将深入探讨空运飞行员的航空器的自动飞行控制系统的原理、功能以及其在现代航空业中的重要作用。
一、自动飞行控制系统的原理和功能1.1 控制原理自动飞行控制系统基于复杂的电子设备和计算机系统,通过融合传感器、数据链和飞机系统,能够精确获取飞行器所需信息,并对飞机执行各种操作指令。
该系统正常运行时,可自动控制飞机的姿态、高度、速度、导航等参数,以及引擎的工作状态,确保飞行器按照预定航线和方式安全飞行。
1.2 功能和特点自动飞行控制系统具备多项功能和特点,以降低飞行员的工作负荷,提高飞行的精确性和安全性。
1.2.1 姿态和航向控制自动飞行控制系统能够实时检测并调整飞机的姿态和航向,确保航行过程中的稳定性。
通过控制飞机的副翼、方向舵等舵面,系统可以精确控制飞机的横滚、俯仰和航向,实现稳定的飞行状态。
1.2.2 路径导航和飞行管理自动飞行控制系统配备GPS和惯性导航系统,能够准确获取位置信息和航线规划,实现精确的路径导航和飞行管理。
飞机可以根据预设的航线和航点飞行,并及时调整航向和高度,确保飞行的准确性和效率。
1.2.3 爬升和下降控制自动飞行控制系统能够实现飞机的自动爬升和下降,并根据需求调整爬升率和下降率。
飞机在垂直方向上的自动控制可以提高飞行的平稳性,并确保按计划完成爬升和下降过程。
1.2.4 自动驾驶和目标速度控制自动飞行控制系统具备自动驾驶的功能,能够按照预设的目标速度和航迹飞行。
飞机在巡航阶段可以自动保持目标速度,并根据气象和空中交通管制的需求进行调整。
这一功能可以大幅减轻空运飞行员的工作负荷,提高飞行的效率和安全性。
飞行控制系统简介自动飞行控制系统飞行控制系统(简称飞控系统)的作用是保证飞机的稳定性和操纵性,提高飞机飞行性能和完成任务的能力,增强飞行的安全性和减轻驾驶员的工作负担.深圳市瑞伯达科技有限公司,致力于成为全球无人机飞行器领导品牌,是智能化无人机飞行器及控制系统的研制开发的专业厂商,生产并提供各行业无人机应用的解决方案。
产品线涵盖各种尺寸多旋翼飞行器、专业航拍飞行器、无人机飞行控制系统、无人机地面站控制系统、高清远距离数字图像传输系统、专业级无线遥控器、高精飞行器控制模块及各类飞行器配件飞行器的自动飞行一、问题的提出早在重于空气的飞行器问世时,就有了实现自动控制飞行的设想。
1891年海诺姆.马克西姆设计和建造的飞行器上安装了用于改善飞行器纵向稳定性的飞行系统。
该系统中用陀螺提供反馈信号,用伺服作动器偏转升降舵。
这个设想在基本概念和手段上与现代飞行自动控制系统有惊人的相似,但由于飞机在试飞中失事而未能成为现实。
60年代飞机设计的新思想产生了,即在设计飞机的开始就考虑自动控制系统的作用.基于这种设计思想的飞机称为随控布局飞行器(Control Configured Vehicle 简称CCV)。
这种飞机有更多的控制面,这些控制面协同偏转可完成一般飞机难以实现的飞行任务,达到较高的飞行性能.飞控系统分类飞控系统分为人工飞行控制系统和自动飞行控制系统两大类。
由驾驶员通过对驾驶杆和脚蹬的操纵实现控制任务的系统,称为人工飞行控制系统。
最简单的人工飞行控制系统就是机械操纵系统。
不依赖于驾驶员操纵驾驶杆和脚蹬指令而自动完成控制任务的飞控系统,称为自动飞行控制系统。
自动驾驶仪是最基本的自动飞行控制系统。
飞控系统构成飞控系统由控制与显示装置、传感器、飞控计算机、作动器、自测试装置、信息传输链及接口装置组成。
控制及显示装置是驾驶员输入飞行控制指令和获取飞控系统状态信息的设备,包括驾驶杆、脚蹬、油门杆、控制面板、专用指示灯盘和电子显示器(多功能显示器、平视显示器等)。

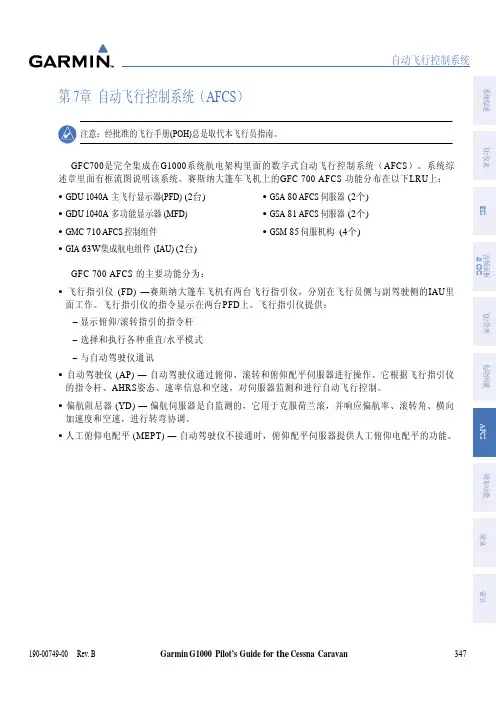
系统综述飞行仪表音频面板& CNS飞行管理危险回避附加功能EISAFCS附录 索引自动飞行控制系统第 7章 自动飞行控制系统(AFCS )GFC700是完全集成在G1000系统航电架构里面的数字式自动飞行控制系统(AFCS )。
系统综述章里面有框流图说明该系统。
赛斯纳大篷车飞机上的GFC 700 AFCS 功能分布在以下LRU 上:• GDU 1040A 主飞行显示器(PFD) (2台)• GDU 1040A 多功能显示器 (MFD)• GMC 710 AFCS 控制组件• GIA 63W 集成航电组件 (IAU) (2台)• GSA 80 AFCS 伺服器 (2个)• GSA 81 AFCS 伺服器 (2个)• GSM 85 伺服机构 (4个)GFC 700 AFCS 的主要功能分为:• 飞行指引仪 (FD) —赛斯纳大篷车飞机有两台飞行指引仪,分别在飞行员侧与副驾驶侧的IAU 里面工作。
飞行指引仪的指令显示在两台PFD 上。
飞行指引仪提供:– 显示俯仰/滚转指引的指令杆– 选择和执行各种垂直/水平模式– 与自动驾驶仪通讯• 自动驾驶仪 (AP) — 自动驾驶仪通过俯仰、滚转和俯仰配平伺服器进行操作。
它根据飞行指引仪的指令杆、AHRS 姿态、速率信息和空速,对伺服器监测和进行自动飞行控制。
• 偏航阻尼器 (YD) — 偏航伺服器是自监测的,它用于克服荷兰滚,并响应偏航率、滚转角、横向加速度和空速,进行转弯协调。
• 人工俯仰电配平 (MEPT) — 自动驾驶仪不接通时,俯仰配平伺服器提供人工俯仰电配平的功能。
190-00749-00 Rev. B Garmin G1000 Pilot’s Guide for the Cessna Caravan 347附加功能危险回避飞行管理音频面板 & C N S飞行仪表系统综述索引附录E I S自动飞行控制系统7.1 AFCS 控制AFCS 控制组件位于MFD 的上方,有以下控制:1HDG 键 选择/撤消 航向选择 模式 2 APR 键选择/撤消 进近 模式 3NAV 键 选择/撤消 导航 模式 4 FD 键仅打开/关闭 飞行指引仪按下一次以默认的垂直和水平模式打开飞行指引仪 再次按下关闭飞行指引仪并关闭指令杆 该键在自动驾驶仪接通时失效5XFR 键 切换现用飞行指引仪和备用飞行指引仪 6 ALT 键 选择/撤消 高度保持 模式 7 VS 键 选择/撤消 垂直速度 模式 8 FLC 键选择/撤消 飞行高度层改变 模式917 CRS 旋钮在相应PFD 的水平状态显示仪(HSI)上以1° 的增量调整预选航道。
飞行控制系统的原理与优化飞行控制系统是现代飞机中极为重要的组成部分,可谓是飞机的“大脑”。
它不仅能够完成飞机的姿态控制和导航功能,还能够监控和修复系统故障。
其作用可谓是不可或缺的,在民航飞行中占据了巨大的地位。
本文将介绍飞行控制系统的基本原理和优化方法,以及其在航空运输业中的应用。
一、飞行控制系统的原理飞行控制系统是由自动飞行控制系统和飞行管理计算机系统两个主要部分组成的。
自动飞行控制系统是进行飞机运动和姿态航向控制的核心模块,而飞行管理计算机系统则是为飞行提供导航和飞行信息,向驾驶员提供必要的帮助和建议。
飞行控制系统的原理可简单概括为以下两个方面:1. 印证传感器:飞行控制系统中的传感器是用于监控飞机状态的。
多数飞机的主要传感器通常包括加速度计、压力计、陀螺仪、罗盘、气压传感器、空速传感器等等。
这些传感器或多或少地被用来捕获飞机状况,从而检测和纠正飞行的误差。
传感器是飞行控制系统的基础,如果它们不可靠或故障,那么整个系统就会崩溃。
2. 运用控制算法:为了使飞行控制系统更加智能化和实用化,现在的飞行控制系统广泛的运用了控制算法,其中最为常见的是反馈控制算法。
反馈控制算法是一种主动控制系统,通过对系统控制量的测量和与设定值进行比较,自动调整控制量的大小来实现控制目标。
由于算法的使用,现代飞行控制系统更加强悍,更加智能化,能够使飞机变得更加平稳和安全。
飞行控制系统的原理并非十分复杂,但其衍生的应用确有极大的专业性和技术性。
下面将介绍优化飞行控制系统的方法及其优势。
二、飞行控制系统的优化1. 时间响应和频率响应分析:时间响应是飞行控制系统的系统动态行为,描述了系统输入改变时系统内部稳态状态的变化过程。
频率响应是飞行控制系统对信号频率变化的反应特性。
频率响应分析是飞行控制系统设计中的重要工具,可以用于评估系统的稳定性和性能,并进行优化。
2. 控制器优化:控制器的设计十分重要,可用于调节飞行控制系统的性能。