adams约束冗余问题
- 格式:doc
- 大小:669.50 KB
- 文档页数:14

的多关节机械手手抓部分的其中,nh是约束方程的个数;nc是广义坐标数。
于是可以得到系统速度的约束方程:(4)。
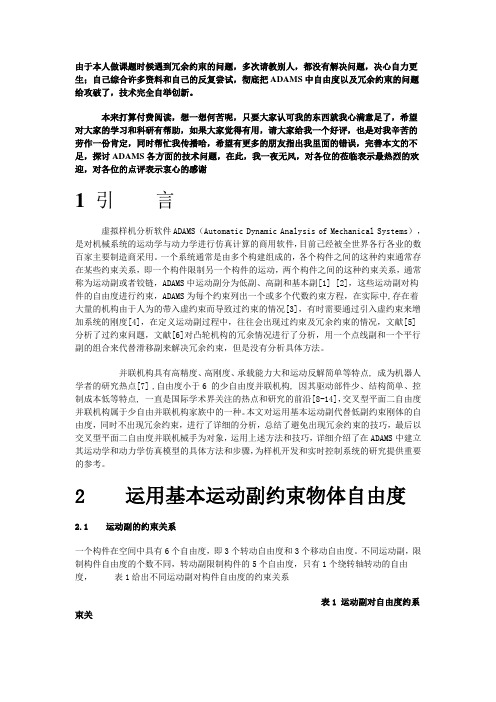
任意时刻t的速度,加速度可以由线性方程的数值方法求解,在ADAMS中通常采用图1 机械手三维装配三维模型的建立虚拟样机的三维模型的建立采用Solid完成,主要包括手抓、底座、大臂机构、小臂机构等,底座上有一电动机带动,实现大臂的转动。
大臂及其小臂的活动主要由液压缸带动,本文重点介绍机械手手抓部分的运动学分析,图2是机械手的三维装配图。
图2 手抓部分装配图立模型过程中遵循的原则。
建立模型之后,导入ADAMS化处理,在满足虚拟样机仿三维模型的建立要尽可能地数量应该尽可能的少,只保留基本的运动部件。
(2)机械手的结构及其分析。
本机械手实现的运动是平均每分钟抓取4次,旋转的角度是是机械手的机构运动简图,电动机带动齿轮转动,实现底座的转动,抓取物料时,由手抓图3 机械手机构运动简图机械手手抓的模型简化及其导入ADAMS中遵循模型的简化原则,将手抓的三维模型简化,模型建立部分使用Solid Edge ST5实现,ADAMA/View提供的Parasolid模型数据交换接口,将模ADAMS软件中。
导入后为模型的每个零件重命名和添加材料属性(steel)。
鉴于本文只研究机械手手抓部分的运动,故将删除了模型中与小臂链接的链接底座、前后缸盖以及套筒等的结构,完成简化后,为了使各个相对运动的部分形成有机的整体,根据构件之间相对运动,在模型中的利用ADAMS/View中的约束工具为各个构件之间引入约束。
图为导入ADAMS后的模型图。
图4 手抓简化仿真模型机械手手抓部分的仿真 机械手的手抓部分是机械手设计的重要部分,也是实现机械工作的必要条件,设计的目的是机械手每分钟中国设备工程 2024.04(下)图5 机械手手抓部分约束的添加机械手的整个驱动部分选用气压驱动,其中包括大小臂的运动以及手抓的张合,液压驱动最大优点是单位质量输出功率大,因为液压传动的动力元件可以达到很高的工作压力,在同等输出功率下具有体积小、质量轻、运动惯性小、动态性能好的特点。
由于本人做课题时候遇到冗余约束的问题,多次请教别人,都没有解决问题,决心自力更生;自己综合许多资料和自己的反复尝试,彻底把ADAMS中自由度以及冗余约束的问题给攻破了,技术完全自举创新。
本来打算付费阅读,想一想何苦呢,只要大家认可我的东西就我心满意足了,希望对大家的学习和科研有帮助,如果大家觉得有用,请大家给我一个好评,也是对我辛苦的劳作一份肯定,同时帮忙我传播哈,希望有更多的朋友指出我里面的错误,完善本文的不足,探讨ADAMS各方面的技术问题,在此,我一夜无风,对各位的莅临表示最热烈的欢迎,对各位的点评表示衷心的感谢1引言虚拟样机分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems),是对机械系统的运动学与动力学进行仿真计算的商用软件,目前己经被全世界各行各业的数百家主要制造商采用。
一个系统通常是由多个构建组成的,各个构件之间的这种约束通常存在某些约束关系,即一个构件限制另一个构件的运动,两个构件之间的这种约束关系,通常称为运动副或者铰链,ADAMS中运动副分为低副、高副和基本副[1] [2],这些运动副对构件的自由度进行约束,ADAMS为每个约束列出一个或多个代数约束方程,在实际中,存在着大量的机构由于人为的带入虚约束而导致过约束的情况[3],有时需要通过引入虚约束来增加系统的刚度[4],在定义运动副过程中,往往会出现过约束及冗余约束的情况,文献[5]分析了过约束问题,文献[6]对凸轮机构的冗余情况进行了分析,用一个点线副和一个平行副的组合来代替滑移副来解决冗余约束,但是没有分析具体方法。
并联机构具有高精度、高刚度、承载能力大和运动反解简单等特点, 成为机器人学者的研究热点[7] ,自由度小于6 的少自由度并联机构, 因其驱动部件少、结构简单、控制成本低等特点, 一直是国际学术界关注的热点和研究的前沿[8-14],交叉型平面二自由度并联机构属于少自由并联机构家族中的一种。

adams疑难问题合集(讨论)fixit註冊使用者註冊日期: May 2006住址: MSC.Softwar e Taiwan文章: 249接触adams一段时间了,一直都在不断克服问题中前进,有苦恼更有喜悦,我想大多数初学者都有这样的感受。
最近在做设计中碰到几个问题,提出来和各位讨论一下,请指点!1. 将测量结果保存为样条曲线的问题。
这样做的目的是将样条曲线作为驱动,去约束其它物体的运动。
是不是在后处理程序中output?我试了几次都没成功,导出的结果都不是样条曲线,该怎么选项?2. step函数和step5函数的使用。
这两个函数比较简单应用也最广泛,但是什么场合下用step什么场合下适合用step5,不知大家怎么考虑。
另为自变量单位的问题,如果不注明就是默认设置的单位,如果需要单位是角度就要输入d:例如:step(time,0,0,0.5,2.3)step(time,0.49,0,0.5,2.3d)。
是这样吗?如果想要设置其它单位,该怎么设置?3. 验证模型的问题模型建立好后,验证模型,系统提示的结论:There are 6 redundant constraint equations.Model verified successfully.疑问是,冗余的约束方程一般是怎样产生的,对仿真会产生什么影响,该怎样处理?后续的运动学仿真我都已经做成功,但始终觉得它们是隐藏在某处的6个炸弹,不知道什么时候会引爆。
4. 液压模块我感觉adams的液压模块作的不是很成功,在这部分我下了不少功夫,但是仿真始终不理想。
机械模型正确,但是一连液压模型就出问题,而且问题还很难排查,不知道各位学友怎么看待。
你们有什么经验或建议请提一下。
一口气提了这么几个问题,希望大家一起讨论一下,共同进步!05-25-2006, #205:53 PM 回覆: adams 疑难问题合集(讨论) patrick管理員註冊日期: Mar 2002住址: MSC 台灣分公司文章: 1525A1: 在後處理選擇table 的方式輸出曲線就可以了. A2. step 函數是一階連續, step5函數則是二階連續. 在給定motion 時, 適合使用step5 A3. 如果有redundant constraint, 在那些自由度的constraint 會被adams 自動釋放,所以約束力會不正確.。


B E I H AN G UNIVERSITY机械原理课程虚拟样机仿真实验报告题目:基于ADAMS的周转轮系的运动学分析姓名:龙玉____________________________学号:12071188班级:1207172013年6月4日北航机械学院基于ADAMS的周转轮系的运动学分析12071188 龙玉北京航空航天大学机械工程及自动化学院摘要本仿真实验主要是针对标准齿轮的周转轮系,结合Adams分析了周转轮系各齿轮的角速度、线速度以及角加速度的变化规律,同时利用该软件对轮系进行模拟仿真,得到了它们的变化曲线。
通过仿真结果与理论分析的比较,验证了理论分析的正确性。
最后通过已知条件,把相应的传动比计算了出来。
关键词:ADAMS;周转轮系;运动学分析1.题目要求如下图所示的周转轮系,图a含有冗余约束,图b不含冗余.(1试计算传动比/3H:(2试用书中给出的一种方法(包括图解法、解析法、复数法以及运动影响系数法等)写出:该机构各输出构件的位置、速度和加速度方程;(3利用ADAMS软件对以上结果进行仿真验证:(4判断该机构是否具有急回特性:(5该类机构的应用。
2)含冗余约束團6基本周转轮系}注:由于不含冗余约束的机构是含冗余约束的一种特殊情况,所以在用ADAMS 做仿真的时候只做了含有兀余约束的。
如此也可以类推不含'兀余约束的情况。
2.机构(角)速度及其加速度的求解2.1运动描述本机构中齿轮1是固定在机架上的,三个齿轮2分别绕着齿轮1以大小相同的角速度和角加速度匀速转动,在仿真模拟中以齿轮2作为主动轮,内齿轮3也随之做匀速转动。
所以,齿轮2和3的角速度、角加速度、线速度等大小不变,方向时刻改变的运动。
对于不含冗余约束的b机构,齿轮2仍然为主动轮,齿轮2和3仍然做匀速转动。
而含冗余约束和不含冗余约束的两个机构都是一口由度机构。
2.2尺寸综合设计理论分析2. 2.1同心条件对于渐开线标准圆柱齿轮传动,有m(z t + z2) _m(z3 -z2)2 2G Z1)Z101H— 2)〜2222. 2. 2装配条件设行星轮的个数为k个,则有5<Pi <Pii]H —<P H 2N/K假设27Tz l其中N为整数,由此可得Z] . _ Zi + Z3N = K1IH =^T~2. 2. 3邻接条件两行星轮Z间不发生碰撞,则应满足I AB > 2r a2其中J B是两齿轮2轮心之距。
规避Adams过约束问题的一般方式1. 机械系统的过约束问题机械系统在创建过程中,如果部件间的约束类型设置不合理将产生过约束的问题,这在Adams的建模过程中是较为常见的现象。
Adams根据自身机制的判断,会对过约束的系统进行相关约束自由度的释放,从而保证系统可以正常运转,但这种自我判断机制并不总是有效,更多的情况是需要设计人员对系统拓扑结构要有清晰的认识,从而保证建模过程中避免过约束问题的产生。
如下图所示四连杆机构:通过分析可知这是一个过约束系统,3×6-4×5=-2,但是如果这是进行仿真计算的话Adams 还是可以完成计算,通过查看模型信息可发现,Adams将其中的三个约束自由度去去除了,这样就保证了系统具有一个自由度,可以正常运行。
如下图所示:基本约束的应用Adams提供了很多类型的约束,通常使用常用约束类型就可满足实际工程的需要,但是当系统过于复杂时,很可能无法满足正常的应用,这时Adams基本副可以很好的解决系统关联的问题。
Adams的基本副包含6种,除了上图中所示的5种(Joint Primitives)外还有一个点点副,如下图所示:通过基本副间的组合可以形成常用的约束副类型,而如果在工程中碰到难以用常用副解决的链接问题时,基本副可以非常灵活的满足用户的需要。
3.约束添加次序的影响模型中约束的设置次序对模型的创建有重要的影响,尤其当模型中具有过约束情形时,这一点表现的尤为突出。
如下模型:对应的模型信息:由于Adams自动去除某些多余的约束自由度,这一点不是用户可以控制的,因此就造成了这个问题。
并且在这个模型中因为用到了齿轮副,而齿轮副的作用对象是一些常用铰接,如果Adams对那些多余的自由度删除先进行删除再进行齿轮副定义的话,那么在进行齿轮副定义时程序会报错。
因此,这时的对策就是先进行齿轮副的定义,将齿轮副用到的铰接先占据住,再完成其他约束方式的创建,这样就不会出现不能创建齿轮副的问题。
动力学仿真中多余约束问题的分析与处理牛洪勤;王珂;任维佳【摘要】多余约束问题是多刚体动力学分析仿真时很棘手的常见问题.针对使用基于欧拉-拉格朗日方程开发的动力学分析软件(如:Adams、DADS等)进行分析仿真时遇到的多余约束问题,进行了理论分析,即:分析约束对求解欧拉-拉格朗日方程的影响(约束向量的雅克比矩阵对求解欧拉-拉格朗日方程的影响),并给出了这一类问题的解决方法.合理地约束模型及正确地变换约束类型和方式.最后,以Adams2005为例,结合工程实例验证了该解决方法的正确性.%Redundant constraints problem is one of tough and common problems in the multi-rigid-body dynamic analysis and simulation. Aiming at the redundant constraints problem encountered in using the multi-rigid-body dynamic analysis software ( Adams 、DADS etc. ) that is developed and based on the Euler-Lagrange equation. The constraint influence on solving the Euler-Lagrange equation have been analyzed. The solution of the problem are given, such as the method of modeling constraints and the approach to eliminate redundant constraints and with a engineer example, they are validated based on Adams2005.【期刊名称】《科学技术与工程》【年(卷),期】2011(011)023【总页数】4页(P5628-5631)【关键词】欧拉-拉格朗日方程;多余约束;动力学分析【作者】牛洪勤;王珂;任维佳【作者单位】中国科学院研究生院信息科学与工程学院,北京100190;中国科学院光电研究院2,北京1000094;中国科学院光电研究院,北京1000094;中国科学院光电研究院,北京1000094【正文语种】中文【中图分类】O313.3机械系统中,通过添加各种约束或运动副限制系统中活动部件的运动。
由于本人做课题时候遇到冗余约束的问题,多次请教别人,都没有解决问题,决心自力更生;自己综合许多资料和自己的反复尝试,彻底把ADAMS中自由度以及冗余约束的问题给攻破了,技术完全自举创新。
本来打算付费阅读,想一想何苦呢,只要大家认可我的东西就我心满意足了,希望对大家的学习和科研有帮助,如果大家觉得有用,请大家给我一个好评,也是对我辛苦的劳作一份肯定,同时帮忙我传播哈,希望有更多的朋友指出我里面的错误,完善本文的不足,探讨ADAMS各方面的技术问题,在此,我一夜无风,对各位的莅临表示最热烈的欢迎,对各位的点评表示衷心的感谢1引言虚拟样机分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems),是对机械系统的运动学与动力学进行仿真计算的商用软件,目前己经被全世界各行各业的数百家主要制造商采用。
一个系统通常是由多个构建组成的,各个构件之间的这种约束通常存在某些约束关系,即一个构件限制另一个构件的运动,两个构件之间的这种约束关系,通常称为运动副或者铰链,ADAMS中运动副分为低副、高副和基本副[1] [2],这些运动副对构件的自由度进行约束,ADAMS为每个约束列出一个或多个代数约束方程,在实际中,存在着大量的机构由于人为的带入虚约束而导致过约束的情况[3],有时需要通过引入虚约束来增加系统的刚度[4],在定义运动副过程中,往往会出现过约束及冗余约束的情况,文献[5]分析了过约束问题,文献[6]对凸轮机构的冗余情况进行了分析,用一个点线副和一个平行副的组合来代替滑移副来解决冗余约束,但是没有分析具体方法。
并联机构具有高精度、高刚度、承载能力大和运动反解简单等特点, 成为机器人学者的研究热点[7] ,自由度小于6 的少自由度并联机构, 因其驱动部件少、结构简单、控制成本低等特点, 一直是国际学术界关注的热点和研究的前沿[8-14],交叉型平面二自由度并联机构属于少自由并联机构家族中的一种。
本文对运用基本运动副代替低副约束刚体的自由度,同时不出现冗余约束,进行了详细的分析,总结了避免出现冗余约束的技巧,最后以交叉型平面二自由度并联机械手为对象,运用上述方法和技巧,详细介绍了在ADAMS中建立其运动学和动力学仿真模型的具体方法和步骤,为样机开发和实时控制系统的研究提供重要的参考。
2 运用基本运动副约束物体自由度2.1 运动副的约束关系一个构件在空间中具有6个自由度,即3个转动自由度和3个移动自由度。
不同运动副,限制构件自由度的个数不同,转动副限制构件的5个自由度,只有1个绕转轴转动的自由度,表1给出不同运动副对构件自由度的约束关系表1 运动副对自由度约系束关2.2 基本运动副构建圆柱副对于如图1的长方体,MARKER_1为固结于大地,位置和姿态与原点一致的点,MARKER_2为控制长方体位置和方向的点,姿态和位置与MARKER_1一致,其在空间中有6个自由度,要实现长方体具有绕X轴转动和沿X轴移动两个自由度,即圆柱副,使其绕Y轴转动、沿Y 轴移动、绕Z轴转动以及沿Z轴移动将被限制,主要有以下几个步骤:1) 添加垂直副约束,限制长方体绕轴转动,在垂直轴选项中选择2 Bodies-2 Location,实体分别选取长方体和大地,位置分别选取长方体上的Marker_2和大地上的Marker_1,方向选取Marker_1的X轴和Y轴,生成的Marker_3和Marker_4的Z轴与Marker_1的X轴和Y轴一致,如图2,要保证Marker_3与Marker_4的Z轴垂直,长方体绕Marker_1的Z轴的转动将被限制,其只有五个自由度,即绕Marker_1的X、Y轴的转动,和沿Marker_1的X、Y、Z轴的移动.2) 添加点线副来限制长方体沿Y和Z轴两个移动自由度,在点线副选项中选择2 Bodies-1 Location,实体分别选取长方体和和大地,位置选取长方体上的Marker_1,方向选择X轴,生成的Marker_5和Marker_6的Z轴与Marker_1 X轴一致,如图3,考虑到1)中垂直轴副约束,长方体只有沿Marker_1的X轴的移动,和绕Marker_1的X、Y轴的转动三个自由度.3) 添加垂直轴副来限制长方体绕Marker_1 Y轴的转动,选择2 Bodies-2 Location,实体分别选取长方体和大地,位置分别选取长方体上的Marker_2和大地上的Marker_1,方向选取Marker_1的X轴和Z轴,生成Marker_7和Marker_8的Z轴与Marker_1的X轴和Z 轴一致,如图4,要保证Marker_7与Marker_8的Z轴垂直,长方体绕Marker_1 Y轴的转动将被限制,考虑到步骤1)、2),长方体剩下两个自由度,即沿Marker_1 X轴的移动和绕Marker_1 X轴的转动,通过在ADAMS中定义General Motion, 选择2 Bodies-1 Location,实体分别选取长方体和大地,位置选取大地上Marker_1,方向选取Marker_1的Z轴,如图5,通过仿真测得绕X轴转动角度和沿X轴移动位移的曲线如图6、7 ,表明自由度的个数和方向是正确的.2.3 基本副创建移动副和转动副1) 移动副添加垂直副限制其绕X轴转动,长方体只能沿Marker_1的X轴移动,选择2 Bodies-2 Location,实体分别选取长方体和大地,位置分别选取长方体上的Marker_2和大地上的Marker_1,方向选取Marker_1的Y和Z轴,生成的Marker_9和Marker_10的Z轴与Marker_1的Y轴和Z轴一致,如图8,要保证Marker_9与Marker_10的Z轴垂直,长方体绕Marker_1 X轴的转动将被限制,长方体只一个自由度,即沿Marker_1 X轴的移动,通过在ADAMS中定义General Motion仿真验证可知,自由度的个数和方向是正确的.2) 转动副添加点面副来限制其沿X轴移动,使长方体只能绕Marker_1 X轴转动,选择2 Bodies-1 Location,实体分别选取长方体和大地,选取大地上的Marker_1,方向选取Marker_1的X 轴,生成的Marker_9和Marker_10的Z轴与Marker_1的X轴一致,如图9,长方体绕Marker_1的X轴的移动将被限制,其只剩下了一个自由度,即绕Marker_1 X轴的转动,通过在ADAMS 中定义General Motion仿真验证可知,自由度的个数和方向是正确的.3 冗余约束分析及处理方法1) 2.3中步骤1)采用创建平行副来限制长方体绕Marker_1 X轴的转动,使其沿Marker_1 X轴移动,选择2 Bodies-1 Location,实体分别选取长方体和大地,位置选取大地上的Marker_1,方向选取Marker_1 Z轴,,长方体绕Marker_1 X、Y轴的转动被限制, 此时验证模型提示只有一个自由度,同时出现冗余约束,如图10,分析表明,当创建平行副来限制其绕Marker_1 X、Y轴的转动,使长方体沿Marker_1 X轴的移动,考虑到1.2中步骤3)的垂直副已经约束长方体绕Marker_1 Y轴的转动,其绕Marker_1 Y轴的转动约束两次,出现过约束即冗余约束的问题,采用2.3中步骤1)创建的垂直副的方法或解除2.2中步骤3)的垂直关系采用本节的方法可以避免冗余约束.2) 2.3中步骤2)采用添加点线副来限制长方体沿Marker_1的X轴移动,使其只能绕Marker_1 X轴转动,选择2_Bodies 1_Location,实体分别选取长方体和大地,位置选取大地上的Marker_1,方向选取Marker_1的Z轴,此时验证模型提示只有一个自由度,但出现冗余约束,如图11,分析表明,当创建点线副来限制长方体沿Marker_1 X、Y轴的移动,考虑到2.2步骤中2)创建的点线副已经约束长方体沿Marker_1 Y轴的移动,其沿Marker_1 Y的移动被约束两次,出现过约束即冗余约束问题,采用2.3中步骤2)创建点面副的方法可以避免冗余约束.3) 根据以上分析可知,用基本运动副来约束构件,同时避免出现冗余的基本技巧和方法:依据表1中基本副对自由度的约束关系,用基本副的组合创建低副或高副时,要保证已经约束过的自由度,不再被约束(即自由状态);添加基本副时,在未被约束的自由度中约束不需要的自由度.4 交叉型平面二自由度并联机械手仿真模型建立以及冗余约束的处理方法4.1 交叉型平面二自由度并联机械手如图12所示,机构的定平台通过支链1、2与动平台相连,两条支链呈“交叉” 形分布,其中支链1采用平行四边形结构,支链1中连杆1、连杆2通过转动副与滑块和动平台相连,其转动副的中心分别为A11、B11和A22、B22;支链2中连杆3_1、连杆3_0通过转动副与滑块2和动平台相连,其转动副的中心分别为A3、B3和A4、B4;通过改变各分支中滑块的移动量, 来来实现动平台在平面一定范围内不同位置的变化。
为了在ADMAS中分析的方便,机构模型简图和建立的局部参考系如图13,局部参考系均位于关节的几何中心,方向和大地坐标系一致,其中Ma_rker 13是关节B4作用于动平台的参考点,Marker 14是关节B4作用于连杆3_0的参考点,Marker 15是关节A4作用于连杆3_0的参考点,Marker 16是关节A4作用于滑块2的参考点;Marker 17是固结于机架,用于创建滑块1与机架移动副的参考点;Marker 18是固结于机架,用于创建滑块2与机架移动副的参考点,ADAMS环境中的机构的模型如图14.4.2 仿真系统的建立建立转动副Joint 1 ,选择2 Body-1Loc ,分别选择连杆2和滑块1,方向选择 Marker 2的Z轴;建立转动副Joint 2 ,选择2 Body-1Loc ,分别选择连杆2和动平台,方向选择Marker 6的Z轴;建立转动副Joint 3 ,选择2 Body-1Loc ,分别选择连杆1和滑块1,方向选择 Marker 4的Z轴;建立转动副Joint 4 ,选择2 Body-1Loc ,分别选择连杆1和动平台,方向选择 Marker 5的Z轴;建立转动副Joint 5,选择2 Body-1Loc ,分别选择连杆3_1和滑块2,方向选择 Marker 10的Z轴;建立转动副Joint 6 ,选择2 Body-1Loc ,分别选择连杆3_1和动平台,方向选择 Marker 11的Z轴;建立转动副Joint 7 ,选择2 Body-1Loc ,分别选择连杆3_0和滑块2,方向选择 Marker 15的Z轴;建立转动副Joint 8 ,选择2 Body-1Loc ,分别选择连杆3_0和动平台,方向选择 Marker 14的Z轴;建立移动副Joint 9 ,选择2 Body-1Loc ,分别选择滑块1和机架,方向选择 Marker 17的X轴建立;建立移动副Joint 10 ,选择2 Body-1Loc ,分别选择滑块2和机架,方向选择 Marker 18的X轴;建立固定副Joint 11, 选择2 Body-1Loc ,分别选择Ground和机架,通过模型验证,得到系统提示有两者自由度,且出现10个冗余自由度信息,如图15。