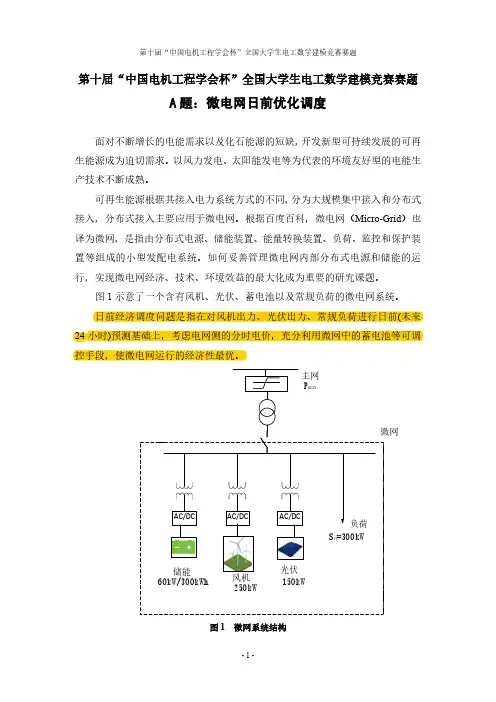
2017年全国大学生电子设计竞赛 微电网模拟系统(A题)
- 格式:docx
- 大小:7.02 MB
- 文档页数:15

2017年全国大学生电子设计竞赛远程幅频特性测试装置(H题)2017年8月12日摘要本远程幅频特性测试装置是由信号源、放大器、幅频特性装置、电源模块等组成。
本设置中信号源的输出频率范围为:1MHz~40MHz且具有自动扫描功能,步进: 1MHz;放大器的输出电压的峰值为1V,且波形无明显失真;远程幅频特性测试装置可用示波器显示放大器输出信号的幅频特性。
放大器的输出信号信息与笔记本电脑连接起来时,笔记本电脑就可完成放大器输出信号的幅频特性测试,并能以曲线的方式显现出来。
用设计利DDS原理由FPGA经D/A转换产生扫频信号,再经待测网络实现峰值检测和相位检测,从而完成了待测网络幅频和相频特性曲线的测量和显示。
经过调试,示波器显示待测网络频率范围1MHz~40 MHz的幅频和相频特性曲线,该系统工作稳定,操作方便。
关键词:频率特性测试仪、幅频特性、相频特性、FPGA1.方案设计与论证 (3)1.1 单片机的选择 (3)1.2整体方案设计 (4)1.3控制系统的论证与选择 (4)2.系统理论分析与计算 (5)2.1扫频测试法理论依据 (5)2.2 DDS信号源 (6)2.3相位差测量 (6)2.4特性曲线显示分析 (7)3.电路的设计 (7)3.1.放大器 (7)3.2 TLV3501比较器的设计 (8)3.2系统总体框图 (9)3.3电源 (10)3.4滤波电路 (11)4.测试方案及测试结果 (12)4.1 测试仪器: (12)4.2 测试方案: (12)5.测试结果: (13)6结论 (13)7.文献 (14)1.方案设计与论证1.1 单片机的选择方案一:普通的AT89S51从内部的硬件到软件有一套完整的按位操作系统,称作位处理器,处理对象不是字或字节而是位。
不但能对片内某些特殊功能寄存器的某位进行处理,如传送、置位、清零、测试等,还能进行位的逻辑运算,其功能十分完备,使用起来得心应手。
但是运算速度过慢,保护能力很差,AD、EEPROM等功能需要靠扩展,增加了硬件和软件负担方案二:STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM Cortex-M3内核。
2017年全国大学生电子设计竞赛试题设计报告四旋翼自主飞行器探测跟踪系统(C题)【本科组】廖聪,吴雨航,张锦华摘要:根据四旋翼飞行器飞行原理,首先根据设计方案采购了飞行器机体模型,选择合适的直流无刷电机作为系统动力装置,选取了功能强大且容易开发的微处理器、传感器和相关电子元器件,并做了大量的系统软硬件调试工作,最终完成了整体设计。
根据系统动力学模型设计控制算法,设计控制系统控制规律,主要包括两个控制回路姿态控制回路、位置控制回路。
在仿真软件平台上,进行控制算法验证及实验研究,优化飞行控制算法参数。
最后,设计实时性高的控制系统软件程序,进行相关实验调试工作,最终设计出能够实现一键飞行探测跟踪的四旋翼自主飞行器。
关键词:ATMEGA2560 瑞萨R5F523T5ADFM MPU6000陀螺仪超声传感器一、系统方案根据设计任务的要求,本系统包括飞行控制模块、驱动模块、飞行导航模块、测距模块等。
1、飞行控制模块的选择飞行控制模块是四旋翼自主飞行器的核心。
按照题目要求,飞行控制模块由ATMEGA2560处理器的开发板专门实现飞行控制算法。
为了实现自主飞行探测跟踪,必须要形成控制的闭环回路,必须要有检测和反馈系统状态的传感器,包括四旋翼的姿态、经纬度、航向、高度、空速、角速率等信号。
目前看来,国内外普遍应用MEMS器件来获取姿态、高度、空速、经纬度等信息。
此外这中间还需要有A/D采样电路、信号调理电路对采集的电信号进行必要的转换和简单的滤波。
针对四旋翼飞行器,控制方法有PID控制、反步法、滑模控制等飞行控制算法,我们采用经典的PID控制算法。
2、驱动模块的选择方案一:采用普通直流电机。
普通直流电机有价格低廉、使用简单等优点,但其扭矩较小,可控性差,此系统要求控制精度高、速度快、且质量要小,所以直流电机一般不能满足要求。
方案二:采用无刷直流电机,其具有响应速度快、较大的启动转矩,从零转速至额定转速具备可提供定转矩的性能。
微电网模拟系统-参考论文--by电子狂牛中文简要本文论述是一种采用STC15F2K60S2单片机为核心的SPWM逆变电源,单片机通过自然数查表法控制内部的3路硬件PWM模块生成SPWM脉冲信号,采用双极性调制方案驱动三相全桥逆变电路,输出经LC低通滤波器滤波,最后在负载上得到稳定的正弦波交流电。
其正弦波输出频率由单片机内部程序控制调节。
另外本系统外接按键,按键能设定开始与停止。
关键词:SPWM,双极性调制,三相逆变,STC单片机Design of a Single-phase Inverter Power SupplyAbstractThis article discusses a use PIC16F1937 microcontroller core of SPWM inverter, two internal microcontroller hardware PWM module generates SPWM pulse signal modulation scheme bipolar drive three-phase full-bridge inverter circuit controlled by a natural number look-up table, Output by the LC low-pass filter, and finally get a stable sine wave AC to the load. Its sine wave output frequency is adjusted by program control MCU. In addition the system external buttons and LCD screen, power button can be set to start and stop, the LCD screen can display real-time input voltage and output current, output sine wave frequency, so that the security and stability of the system has been greatly improved.Key words: SPWM, bipolar modulation, phase inverter, PIC microcontroller目录前言 (5)1.1 研究目的及要求 (5)1.2 相关研究现状及前景 (5)1.3内容章节概述 (6)系统分析 (7)2.1 逆变器的基本概念与工作原理 (7)2.1.1正弦波逆变器的电路构成 (7)2.1.2常用的逆变器调压方法: (7)2.2逆变器的基本类型 (7)2.3 PWM控制技术 (8)3.1总体原理图 (11)3.2电路原理图 (12)3.2.1单片机的选择 (12)3.2.2 滤波电路 (12)3 .2.5 场效应管的选择 (13)3.3小结 (14)4 程序设计 (15)4.1 程序选择说明 (15)4.2 SPWM查表 (15)5.1 系统仿真 (18)5.2实物照片 (19)5.2单片机输出波形测试 (19)5.2.1测试仪器 (19)5.1 示波器 (20)5.2.2测试方法 (20)5.2.3测试结果 (20)5.4测试结论 (21)6总结 (22)6.1 结论总结 (22)附录: (23)程序代码 (23)前言1.1 研究目的及要求掌握正弦波逆变器的电路的组成,重点明白其中中各元器件的原理及用处,对正弦波逆变电路在电阻负载、电阻电感负载是的工作情况及其波形作全面分析,并研究工作频率对电路工作波形的影响。
微电网模拟系统本系统分为两个三相逆变系统,逆变器 1 采用软件生成三相spwm 波,通过IR2110 驱动MOS 管,最后通过LC 滤波产生三相正弦波,通过电压传感器反馈输出交流的有效值给单片机,软件通过采样得到的有效值进行PID 控制算法,来控制SPWM 波,达到稳压的目的。
逆变器 2 电路主拓扑与逆变器一样,控制方法采用了硬件三相滞环比较型电流跟踪法。
可以输出恒定的交流电流,通过采集逆变器1 的电流波形,送入逆变器 2 控制系统的调制波输入,逆变器2 输出电流就会跟踪调制波的波形,达到同频同相的目的,通过控制调制波的的放大系数,可以改变两个逆变器的电流比,让两个逆变的电流比值恒定。
标签:三相逆变器;交流并联供电;SPWM 控制;滞环跟踪控制1 系统方案对竞赛题目进行分析,由于题目要求逆变器输出线电压的负载调整率低于0.3%,可见逆变器并联供电的时候必须保证输出线电压恒定。
另一方面,题目要求两个逆变器在输出时能够做到功率分配的控制,也就说明逆变器必须也能够有效地控制各自的输出电流。
需要同时实现并联系统三相输出的恒压和各逆变器的恒流控制,是本次竞赛题目的难点所在。
下面则针对于本题的要求,对控制方法的方案设计进行讨论。
控制方法的论证与选择为了解决题目要求的对输出线电压的恒压控制,并做到对各个逆变器的恒流控制,可以考虑对两个逆变器采用不同的控制策略。
对逆变器 1 做恒定线电压的闭环控制,在负载不变的情况下,并联系统输出的总电流是恒定的。
在此基础上,对逆变器2 做恒流并网控制,将逆变器 1 的输出视为主电网,控制逆变器2 的输出并网电流恒定。
那么只要使得逆变器2 的给定电流与总电流之间保持一定的比例关系,就可以保证逆变器 1 和逆变器 2 的输出电流能够按照设定的比例分配。
但是对于两个逆变器的控制方案,也有多种选择,下面分开进行讨论:方案一:采用单片机控制两个逆变器,在输出进行反馈两路电压电流信号进入单片机,采用PID 算法控制定时器输出占空比,从而控制输出电流和电压,方法简单,容易实现。

2017年全国大学生电子设计竞赛远程幅频特性测试仪(H题)2017年08月12日摘要本幅频特性测试装置采用STM32F407为主控芯片,通过集成DDS芯片AD9959作为信号源,实现了幅度和频率的动态可调;通过级联两块AD8367作为放大器,实现了增益0-40dB连续可调,具有较好的噪声抑制效果;通过AD8310对数检波模块,实现了不同频率信号幅度的测量,并且能够定性的绘制出幅频特性曲线.关键词:幅频特性测试装置;DDS;VGA;低噪;对数检波AbstractThe amplitude frequency characteristic test device uses STM32F407 as the main control chip, through the integrated DDS chip AD9959 as the signal source, to achieve the amplitude and frequency of the dynamic adjustable; through the cascade of two AD8367 as an amplifier, to achieve a gain of 0-40dB continuously adjustable , With good noise suppression effect; through the AD8310 logarithmic detection module, to achieve a different frequency signal amplitude measurement, and can qualitatively draw the amplitude and frequency characteristics of the curve. Keyword: amplitude frequency characteristic test device;DDS;VGA;low noise;logarithmic detection目录一.方案论证.................................................................................................................. 1.1方案比较与选择.......................................................................................... 1.2方案描述......................................................................................................二.理论分析与计算........................................................................................2.1DDS模块..................................................................................................... 2.2放大器模块.................................................................................................. 2.3幅值测量模块..............................................................................................2. 4 π型衰减网络三.电路与程序设计........................................................................................3.1电路设计...................................................................................................... 3.2程序设计........................................................................................................四.测试方案与测试结果 ............................................................................... 五.结论............................................................................................................................远程幅频特性测试装置(H题)一.系统方案1.方案比较与选择1)信号源模块:方案一:采用直接数字频率合成(DDS)方案。
2017年全国电赛题目2017年全国电赛题目分为两部分,理论和实践。
下面将分别介绍。
一、理论部分1.请简述数字信号处理的基本原理和主要应用领域。
并结合一个具体示例,详细说明数字信号处理在该领域中的作用及其优势。
答:数字信号处理是指对连续时间信号进行数字化采样,通过数学处理方法对这些数字序列进行运算和分析的过程。
数字信号处理主要包括信号采样、量化、编码、处理和重构等环节。
数字信号处理的应用领域非常广泛,包括通信、雷达、生物医学、图像处理等。
以图像处理为例,我们使用数字相机拍摄的照片就是一种离散的数字信号。
通过数字信号处理技术,我们可以对这些数字图像进行降噪、增强、滤波等操作,达到改善图像质量的目的。
而传统的模拟图像处理技术则无法对数字图像进行高效、精确的处理。
数字信号处理在图像处理中的优势主要有以下几点。
首先,数字信号处理可以充分利用计算机和数字电子器件的高计算性能和低成本,实现复杂的算法和功能。
其次,数字信号处理利用数学方法对信号进行精确的分析和处理,具有较高的准确性和稳定性。
最后,数字信号处理技术易于集成和扩展,可以方便地与其他软硬件系统进行接口,实现功能的无缝衔接。
2.现实中经常出现声音同时具有高频和低频成分的情况。
请解释声音合成技术中的加性合成和减性合成,并比较它们的优缺点。
答:声音合成是指通过数字信号处理技术通过某种途径合成一段声音信号的过程。
在声音合成技术中,加性合成和减性合成是两种常见的方法。
加性合成是指将不同频率的声波叠加在一起,形成复杂的声音。
这种方法通过相位和振幅的调控,将多个简单的音调组合形成复杂的声音信号。
加性合成的优点是可以灵活地调整和组合不同的频率分量,以形成丰富多样的声音。
但是,加性合成的缺点是合成过程较为复杂,需要混合和叠加多种频率的声波,计算和处理的复杂度较高。
减性合成是指从复杂声音信号中分离出特定频率成分的过程。
通过滤波和频域分析等技术,可以将声音信号中的特定频率成分提取出来,从而达到减小复杂声音的目的。
附件2比赛题目及评分标准【题目一】Xilinx哈夫曼编码1.设计要求要求对一段数据序列进行哈夫曼编码,使得平均码长最短,输出各元素编码和编码后的数据序列。
(1)组成序列的元素是[0-9]这10个数字,每个数字其对应的4位二进制数表示。
比如5对应0101,9对应1001。
(2)输入数据序列的长度为256。
(3)先输出每个元素的编码,然后输出数据序列对应的哈夫曼编码序列。
2.电路接口RTL级代码顶层模块名统一为HuffmanCoding,可参考电路接口与时序如下:(可以根据自身设计需求,对电路接口进行修改) module HuffmanCoding(input wire clk,input wire rst_n,input wire [3:0] data_in,input wire start,output wire output_data,output wire output_start,output wire output_done);1clk rst_nstartoutput_done(1)复位之后,当start信号高有效后开始连续输入256个数据序列,data_in数据宽度为4,输入需要256个时钟周期。
(2)经过运算后,output_start信号高有效后,开始输出结果output_data。
output_data信号数据宽度是1,因此输出是二进制序列。
最后output_done 高有效说明整个编码过程结束。
(3)output_data数据包含2个部分。
先输出[0-9]这10个数字的哈夫曼编码(具体的输出格式可以自行设定),然后输出数据序列哈夫曼编码后的序列。
评分标准:1. TestBench建议先用C/C++或者Matlab等高级语言实现上述哈夫曼编码设计需求,并以此为基准,作为电路仿真的TestBench。
2. 电路功能电路功能的完成情况,包括是否满足设计要求、源代码、仿真程序和文档说明等。
摘要:本设计以STM32F103单片机为控制核心,采用全桥式DC-AC拓扑结构,设计了输出电压和频率稳定,同时输出功率在一定范围内可调的三相逆变器,制作了由两个三相逆变器等组成的微电网模拟系统。
本系统由STM32单片机输出SPWM波控制IR2110驱动芯片驱动开关管实现正弦逆变。
采用数字PID算法实现电压反馈精准控制输出电压,通过零点检测校正输出电流相位控制相位同步,采用主从设置法实现均流控制,有效地控制了两组逆变器。
本系统具有过流保护功能,反馈系统自动调整输出功率,由OLED显示当前工作状态。
系统达到了设计要求中的大部分指标,工作稳定,经济简洁,可靠性较高。
关键词:STM32F103 SPWM 正弦逆变一、系统方案1.DC-AC模块拓扑结构的选择系统要求逆变器提供三相对称交流电。
考虑以下两种方案能够实现逆变。
方案一:三相三桥式电路结构。
三相三桥式电路成本低,能够通过软件进行补偿,电路结构简单,容易实现。
但程序控制相对复杂。
方案二:三相四桥式电路结构。
三相四桥式电路工作效率高,不会产生泻流,同时具有抗不平衡功能。
但电路结构复杂,驱动电路也相对复杂。
结合本题要求,逆变器需提供三相对称交流电且考虑到时间问题,所以采用方案一。
2.控制系统的选择方案一:采用MSP430单片机。
MSP430系列是一种16位超低功耗、具有简单指令集的混合信号处理器。
能够在25MHz晶振的驱动下,实现40ns的指令周期,具有16位的数据宽,具有独特的超低功耗,中断源较多,并且可以任意嵌套。
方案二:采用STM32F103处理器。
STM32系列运行速度快,时钟频率可达72MHz,11个定时器以及丰富的I/O口,并且内置3个12位的A/D转换器,2个12位D/A转换器,其高级定时器可产生带死区互补的PWM波,性价比较高。
鉴于STM32F103处理器运行速度更快,成本更低,资源也满足设计要求,因此本设计选用方案二。
3.电流检测方案的选择方案一:霍尔传感器。
2011 年全国大学生电子设计竞赛试题参赛注意事项(1)2011 年8 月31 日8:00 竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3 人,开赛后不得中途更换队员。
(5)参赛队必须在学校指定的竞赛场地内进行独立设计和制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)2011 年9 月3 日20:00 竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
开关电源模块并联供电系统(A 题)【本科组】一、任务设计并制作一个由两个额定输出功率均为16W 的8V DC/DC 模块构成的并联供电系统(见图1)。
图1 两个DC/DC 模块并联供电系统主电路示意图二、要求1.基本要求(1)调整负载电阻至额定输出功率工作状态,供电系统的直流输出电压U O=8.0±0.4V。
(2)额定输出功率工作状态下,供电系统的效率不低于60% 。
(3)调整负载电阻,保持输出电压U O=8.0±0.4V,使两个模块输出电流之和I O =1.0A 且按I1:I2=1:1 模式自动分配电流,每个模块的输出电流的相对误差绝对值不大于5%。
(4)调整负载电阻,保持输出电压U O=8.0±0.4V,使两个模块输出电流之和I O =1.5A 且按I1:I2= 1:2 模式自动分配电流,每个模块输出电流的相对误差绝对值不大于5%。
2. 发挥部分(1)调整负载电阻,保持输出电压U O=8.0±0.4V,使负载电流I O 在1.5~3.5A 之间变化时,两个模块的输出电流可在(0.5~2.0)范围内按指定的比例自动分配,每个模块的输出电流相对误差的绝对值不大于2%。
微电网模拟系统设计报告题目:微电网模拟系统摘要本文针对微电网模拟系统研究背景,设计了可编程逻辑器件FPGA为控制核心的两个三相逆变器系统。
本系统的硬件主要由逆变主电路系统和FPGA控制电路系统构成,包括FPGA控制电路、CC2640的AD采样电路、三相逆变驱动电路、互感器电路、辅助电源电路、调压整流电路、滤波及缓冲电路等。
由FPGA控制电路输出六路PWM信号(PWM1-PWM6)来控制逆变器的MOS管通断,通过电流电压互感器对输出进行反馈,再经A/D转换器进行采样,传给FPGA控制电路来调节输出,构成闭环控制系统。
本系统软件设计是利用Verilog HDL的FPGA逻辑门、IP核、时钟(DMC)等资源生成SPWM模块、并行通信模块结合TI的CC260的A/D 采集和显示模块。
最后,将软硬件系统联合调试,经验证,软硬件都达到预期目标,实际效果较好。
关键字:微电网模拟系统;FPGA可编程逻辑;三相逆变;SPWM模块目录1方案论证 (1)1.1主控单元的比较与选择 (1)1.2SPWM模块的比较与选择 (1)1.3驱动模块的比较与选择 (1)1.4方案描述 (2)2理论分析与计算 (2)2.1逆变器提高效率的方法 (2)2.2运行模式控制策略 (3)3电路与程序设计 (3)3.1逆变器主电路与器件选择 (3)3.1.1总体系统电路 (4)3.1.2逆变电路 (4)3.1.3滤波电路 (4)3.2控制电路与控制程序 (5)3.2.1控制电路............................................................................ 错误!未定义书签。
3.2.2控制程序 (5)4测试方案与测试结果 (5)4.1测试方案及测试条件.................................................................... 错误!未定义书签。
2017年全国电赛L题和P题简析武汉大学赵茂泰2017.10. 30L题:自动泊车系统1.题意2.电动小车的驱动方式3.自动泊车的方案及分析4.计费及自动碰撞检测5.计时及计费1.题意◆自动泊车系统:不用人工干预,自动停车入位的系统。
◆自动泊车系统目前有两种形式:1,高档轿车所具有的自动泊车功能。
目前国内宝马、奔驰、大众等车型都配备有这种功能。
泊车时,驾驶员只要按下自动泊车的按钮,车头两侧的雷达就会自动扫描周边,一旦发现合适的空位,就自动进入停车位。
2,基于智能车库的自动泊车系统。
泊车时,驾驶员只需要把车停在车库指定地点并进行简单操作,就可以离开。
汽车将在智能化车库的配合下,自动在车库中找到合适的停车位。
本题定义的自动泊车系统是一种需要智能化车库配合的,简易自动泊车系统。
二、要求(简化)(1)停车场中的控制装置能通过键盘设定一个空车位,同时点亮对应空车位的LED灯。
(2)控制装置设定为某一个空车位;电动小车能自动驶入指定停车位;驶入停车位后停车5s,停车期间发出声光信息;然后再从停车位驶出停车场。
要求泊车时间(指一进一出时间及停车时间)越短越好;泊车过程中碰撞隔板的次数越少越好。
(3)电动小车具有检测并实时显示在泊车过程中碰撞隔板次数的功能,要求电动小车周边任何位置碰撞隔板都能检测到。
(4)停车场控制装置具有自动计时计费功能,实时显示计费时间和停车费。
计费按每30秒5元计算(未满30秒按5元收费)。
学生作品采用了以下几种驱动方式:●后轮单驱方式●四轮四驱方式●采用麦冷的四轮四驱方式●其他方式(略)后轮单驱方式(视频)后轮单驱方式驱动方式与多数实际汽车的驱动方式是相同的。
单驱方式的汽车转弯半径大,自动泊车时间长,泊车过程的控制比较复杂。
只有10-20% 的参赛队采用该方式。
四轮四驱方式四轮四驱方式能分别控制每一个车轮的转动,姿态控制灵活,大幅度缩小了小车转弯的半径。
约有80%的参赛队都采用了这种驱动方式。
2017电赛微电网模拟系统作者:日期:微电网模拟系统-参考论文--by电子狂中文简要本文论述是一种采用STC15F2K60S2单片机为核心的SPWM逆变电源,单片机通过自然数查表法控制内部的3路硬件PWM模块生成SPWM脉冲信号,采用双极性调制方案驱动三相全桥逆变电路,输出经LC低通滤波器滤波,最后在负载上得到稳定的正弦波交流电。
其正弦波输出频率由单片机内部程序控制调节。
另外本系统外接按键,按键能设定开始与停止。
关键词:SPWM,双极性调制,三相逆变,STC单片机Desig n of a Sin gle-p hase In verter Po wer SupplyAbstractThis article discusses a use PIC16F1937 microco ntroller core of SPWM in verter, two internal microc on troller hardware PWM module gen erates SPWM pu Ise sig nal modulati on scheme bipo lar drive three-p hase full-bridge inv erter circuit con trolled by a n atural nu mber look- up table, Output by the LC low -p ass filter, and fin ally get a stable sine wave AC to the load. Its sine wave out put freque ncy is adjusted by p rogram controlMCU. In additi on the system exter nal butt ons and LCD scree n, po wer butt on can be set to start and stop, the LCD scree n can dis play real-time input voltage and out put curre nt, out put sine wave freque ncy, so that the security and stability of the system has bee n greatly impro ved.Key words: SPWM, bipo lar modulati on, p hase in verter, PIC microc on troller目录、八、>刖言.......................1.1研究目的及要求....1.2相关研究现状及前景1.3内容章节概述 .... 系统分析5…5 5 6 7…2.1逆变器的基本概念与工作原理2.1.1正弦波逆变器的电路构成2.1.2常用的逆变器调压方法:2. 2逆变器的基本类型2. 3 PWM控制技术3.1总体原理图.....3. 2电路原理图 (7)■7.■7. 73. 2■ 1单片机的选择3. 2. 2滤波电路3 . 2. 5场效应管的选择3. 3小结.................. 4程序设计.................................4. 1程序选择说明.......4. 2 SPWM 查表 .......5.1系统仿真...........5.2实物照片...........5.2单片机输出波形测试5. 2. 1测试仪器5.1示波器 ........5. 2 . 2测试方法5. 2 . 3测试结果5. 4测试结论6总结 ..............6.1结论总结附录:.............程序代码...........8111212 12.1. 3.1. 4• 1.515 151819 19 19 .20 202021222223.23、才▲、■刖言1.1研究目的及要求掌握正弦波逆变器的电路的组成,重点明白其中中各元器件的原理及用处,对正弦波逆变电路在电阻负载、电阻电感负载是的工作情况及其波形作全面分析,并研究工作频率对电路工作波形的影响。