5.3 角度观测方法(1)
- 格式:ppt
- 大小:1.33 MB
- 文档页数:36
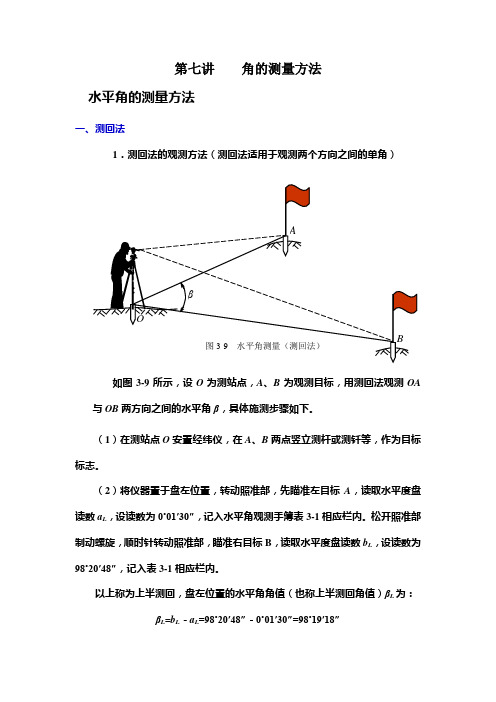
第七讲角的测量方法水平角的测量方法一、测回法1.测回法的观测方法(测回法适用于观测两个方向之间的单角)如图3-9所示,设O为测站点,A、B为观测目标,用测回法观测OA 与OB两方向之间的水平角β,具体施测步骤如下。
(1)在测站点O安置经纬仪,在A、B两点竖立测杆或测钎等,作为目标标志。
(2)将仪器置于盘左位置,转动照准部,先瞄准左目标A,读取水平度盘读数a L,设读数为0˚01′30″,记入水平角观测手簿表3-1相应栏内。
松开照准部制动螺旋,顺时针转动照准部,瞄准右目标B,读取水平度盘读数b L,设读数为98˚20′48″,记入表3-1相应栏内。
以上称为上半测回,盘左位置的水平角角值(也称上半测回角值)βL为:βL=b L-a L=98˚20′48″-0˚01′30″=98˚19′18″(3)松开照准部制动螺旋,倒转望远镜成盘右位置,先瞄准右目标B,读取水平度盘读数b R,设读数为278˚21′12″,记入表3-1相应栏内。
松开照准部制动螺旋,逆时针转动照准部,瞄准左目标A,读取水平度盘读数a R,设读数为180˚01′42″,记入表3-1相应栏内。
以上称为下半测回,盘右位置的水平角角值(也称下半测回角值)βR为:βR=b R-a R=278˚21′12″-180˚01′42″=98˚19′30″上半测回和下半测回构成一测回。
表3-1 测回法观测手簿(4)对于DJ 6型光学经纬仪,如果上、下两半测回角值之差不大于±40″,认为观测合格。
此时,可取上、下两半测回角值的平均值作为一测回角值β。
在本例中,上、下两半测回角值之差为:△β=βL -βR =98˚19′18″-98˚19′30″=-12″一测回角值为:(21)(21=+=R L βββ98˚19′18″+98˚19′30″=)98˚19′24″将结果记入表3-1相应栏内。
注意:由于水平度盘是顺时针刻划和注记的,所以在计算水平角时,总是用右目标的读数减去左目标的读数,如果不够减,则应在右目标的读数上加上360˚,再减去左目标的读数,决不可以倒过来减。

实地测绘中如何进行角度观测与测量实地测绘是一项关乎地理、土地利用、建筑等领域的重要工作,而角度观测与测量是其中一个关键环节。
本文将就实地测绘中如何进行角度观测与测量进行探讨。
一、角度观测的意义与方法在实地测绘中,角度观测是测量地物方向以及地物之间相对位置的基础。
通过观测地物之间的角度,我们可以推导出地物之间的距离和位置关系。
角度观测的方法有很多种,最常用的是经纬仪观测法和全站仪观测法。
经纬仪观测法通过在测量点上设置仪器,利用刻度盘上的刻度来观测地物之间的角度。
而全站仪观测法则通过全站仪测量地物之间的水平角度和垂直角度,再通过三角函数计算出地物之间的角度。
二、角度观测的注意事项在进行角度观测时,有一些注意事项需要我们遵守。
首先,需要保证测量的仪器水平放置,以避免因仪器像机不水平而导致的观测误差。
其次,要对测量对象进行仔细分析与识别,选择合适的观测点和测量方法。
最后,要注意观测环境的影响,如天气状况、自然景物等,以及地物本身特点对观测结果可能产生的影响。
三、角度测量的实际操作角度测量在实地测绘中扮演着重要的角色,其操作需要一定的技巧和经验。
首先,需要在测量点上进行准确的导向设置,以保证仪器的准确定位。
其次,要根据具体需要调整仪器的测量范围和精度,保证所获得的测量结果符合实际需求。
此外,角度测量还需要根据实际情况判断是否需要进行附加观测。
例如,在地势复杂或遮挡物较多的地区,常常需要进行反复观测或添加中间测站,以提高测量的精度和可靠性。
四、角度观测与测量的应用角度观测与测量在实地测绘中有着广泛的应用。
首先,它可以用于制图和地图更新,通过观测地物之间的角度,可以准确地绘制地形图、土地利用图等。
其次,角度观测还可以用于测量建筑物的位置和角度,对于土地规划和建设项目的实施具有重要意义。
此外,角度观测和测量在工程建设、水利工程和导航等方面也得到了广泛的应用。
例如,在道路建设中,角度观测可以用于测量曲线的弯度和转角,以确定道路的几何形状;在水利工程中,角度观测可以用于测量河流的弯曲程度和地下管道的布置。


角度测量的原理及其方法角度测量原理一、水平角测量原理地面上两条直线之间的夹角在水平面上的投影称为水平角。
如图3-1所示,A、B、O为地面上的任意点,通OA和OB直线各作一垂直面,并把OA和OB分别投影到水平投影面上,其投影线Oa和Ob的夹角∠aOb,就是∠AOB的水平角β。
如果在角顶O上安置一个带有水平刻度盘的测角仪器,其度盘中心O′在通过测站O点的铅垂线上,设OA和OB两条方向线在水平刻度盘上的投影读数为a1和b1,则水平角β为:β= b1 - a1(3-1)二、竖直角测量原理在同一竖直面内视线和水平线之间的夹角称为竖直角或称垂直角。
如图3-2所示,视线在水平线之上称为仰角,符号为正;视线在水平线之下称为俯角,符号为负。
图3-1 水平角测量原理图图3-2 竖直角测量原理图如果在测站点O上安置一个带有竖直刻度盘的测角仪器,其竖盘中心通过水平视线,设照准目标点A时视线的读数为n,水平视线的读数为m,则竖直角α为:α= n - m (3-2)光学经纬仪一、DJ6级光学经纬仪的构造它主要由照准部(包括望远镜、竖直度盘、水准器、读数设备)、水平度盘、基座三部分组成。
现将各组成部分分别介绍如下:1.望远镜望远镜的构造和水准仪望远镜构造基本相同,是用来照准远方目标。
它和横轴固连在一起放在支架上,并要求望远镜视准轴垂直于横轴,当横轴水平时,望远镜绕横轴旋转的视准面是一个铅垂面。
为了控制望远镜的俯仰程度,在照准部外壳上还设置有一套望远镜制动和微动螺旋。
在照准部外壳上还设置有一套水平制动和微动螺旋,以控制水平方向的转动。
当拧紧望远镜或照准部的制动螺旋后,转动微动螺旋,望远镜或照准部才能作微小的转动。
2.水平度盘水平度盘是用光学玻璃制成圆盘,在盘上按顺时针方向从0°到360°刻有等角度的分划线。
相邻两刻划线的格值有1°或30′两种。
度盘固定在轴套上,轴套套在轴座上。
水平度盘和照准部两者之间的转动关系,由离合器扳手或度盘变换手轮控制。

第七讲角的测量方法水平角的测量方法一、测回法1.测回法的观测方法(测回法适用于观测两个方向之间的单角)如图3-9所示,设O为测站点,A、B为观测目标,用测回法观测OA 与OB两方向之间的水平角β,具体施测步骤如下。
(1)在测站点O安置经纬仪,在A、B两点竖立测杆或测钎等,作为目标标志。
(2)将仪器置于盘左位置,转动照准部,先瞄准左目标A,读取水平度盘读数a L,设读数为0˚01′30″,记入水平角观测手簿表3-1相应栏内。
松开照准部制动螺旋,顺时针转动照准部,瞄准右目标B,读取水平度盘读数b L,设读数为98˚20′48″,记入表3-1相应栏内。
以上称为上半测回,盘左位置的水平角角值(也称上半测回角值)βL为:βL=b L-a L=98˚20′48″-0˚01′30″=98˚19′18″(3)松开照准部制动螺旋,倒转望远镜成盘右位置,先瞄准右目标B,读取水平度盘读数b R,设读数为278˚21′12″,记入表3-1相应栏内。
松开照准部制动螺旋,逆时针转动照准部,瞄准左目标A,读取水平度盘读数a R,设读数为180˚01′42″,记入表3-1相应栏内。
以上称为下半测回,盘右位置的水平角角值(也称下半测回角值)βR为:βR=b R-a R=278˚21′12″-180˚01′42″=98˚19′30″上半测回和下半测回构成一测回。
表3-1 测回法观测手簿(4)对于DJ 6型光学经纬仪,如果上、下两半测回角值之差不大于±40″,认为观测合格。
此时,可取上、下两半测回角值的平均值作为一测回角值β。
在本例中,上、下两半测回角值之差为:△β=βL -βR =98˚19′18″-98˚19′30″=-12″一测回角值为:(21)(21=+=R L βββ98˚19′18″+98˚19′30″=)98˚19′24″将结果记入表3-1相应栏内。
注意:由于水平度盘是顺时针刻划和注记的,所以在计算水平角时,总是用右目标的读数减去左目标的读数,如果不够减,则应在右目标的读数上加上360˚,再减去左目标的读数,决不可以倒过来减。

三角测量中的角度观测与角度解算方法三角测量是地理测量学中常用的一种测量方法,通过测量三角形的边长和角度来确定未知区域的位置和形状。
其中,角度观测和角度解算是三角测量的关键步骤。
本文将从角度观测和角度解算两个方面介绍三角测量中的角度观测与角度解算方法。
一、角度观测方法角度观测是指测量三角形内部或外部的角度大小的过程。
角度观测的准确性直接影响到三角测量结果的精度。
常用的角度观测方法有光学仪器观测法、电子仪器观测法和全站仪观测法等。
光学仪器观测法主要利用经纬仪、经纬仪、全站仪等光学测量仪器进行角度观测。
这些仪器通过读取仪器刻度上的数值或测量仪器上的电子显示屏上的数值来确定角度大小。
光学仪器观测法具有测量范围广、测量精度高的特点,在地理测量学中得到广泛应用。
电子仪器观测法是指利用电子测量仪器进行角度观测。
电子仪器观测法使用传感器感知角度信息,并通过电子装置将角度信息转化为数字信号,进而计算角度大小。
电子仪器观测法具有测量速度快、操作简便的特点,适用于需要大量角度观测的场合。
全站仪观测法是综合了光学仪器和电子仪器的观测方法。
全站仪集成了观测仪器和数据处理仪器,能够实现角度观测和数据处理的一体化。
全站仪观测法在现代测量领域得到广泛应用,是目前三角测量中角度观测的主要方法。
二、角度解算方法角度解算是指根据测量得到的角度观测值,通过一定的计算方法来确定未知角度的过程。
角度解算的准确性和精度对三角测量的结果有着重要影响。
常用的角度解算方法有平差解算法、三角函数解算法和解析解算法等。
平差解算法是一种重要的角度解算方法。
平差解算法通过考虑角度观测的误差以及测量结果的可靠性,来修正和优化角度解算结果。
平差解算法能够提高角度解算的精度,对于精密三角测量尤为重要。
三角函数解算法是另一种常用的角度解算方法。
三角函数解算法利用三角函数的性质和角度关系来进行角度解算。
通过对已知角度的三角函数值和角度之间的关系进行运算和推导,可以解算出未知角度的数值。
学习测量角度掌握角度的测量和单位学习测量角度:掌握角度的测量和单位角度是几何学中重要的概念,它可以用来描述两条线之间的方向关系。
学习测量角度非常重要,因为它在各个学科领域中都有广泛的应用。
本文将介绍角度的测量方法和常见的角度单位。
一、角度的定义在几何学中,角度是由两条射线(也称为边)共同确定的形状。
这两条射线的起点称为顶点,而射线之间的空间称为角度。
角度通常用希腊字母“θ”来表示。
二、角度的测量方法1. 量角器测量法最常用的测量角度的方法是使用量角器。
量角器是一种工具,通常由透明的塑料或金属制成,具有一个固定的顶点和一个可以旋转的臂。
使用量角器时,将固定的顶点对准角的顶点,然后读取在旋转臂上给出的度数。
2. 显微镜测量法在一些实验室中,显微镜也可以用来测量非常小的角度。
通过调整显微镜的焦距,可以放大被测角度的细节,以便更准确地测量。
3. 数学计算法当无法使用工具进行测量时,可以使用数学计算方法来估算角度的大小。
例如,利用三角函数(正弦、余弦和正切),可以通过已知边长的比例来计算角度。
这种方法适用于非常小或非常大的角度,以及不便使用工具测量的情况。
三、常见的角度单位在测量角度时,常见的角度单位有度(°)、弧度(rad)和百分度(%)。
1. 度(°)度是最常用的角度单位,一个圆周被等分为360个相等的部分,每个部分就是一个度。
角度的度量通常以°表示,如:45°表示45度。
2. 弧度(rad)弧度是一种更精确的角度单位,常用于数学和物理学中。
弧度表示的是弧长与半径之间的比值。
一个圆周的长度为2πr,而一个完整的圆周对应的角度为360°,则1弧度等于360°/ 2π ≈ 57.3°。
3. 百分度(%)百分度是一种基于圆周的度量方式。
一个完整的圆周对应的百分度为100%,所以1%的百分度等于360°/ 100 = 3.6°。
水平角的观测方法(全)与误差改正全攻略一、全站仪和经纬仪水平角观测方法共分为以下三种:(1)测回法:只有两个方向时采用。
测站应检核的限差有,半测回较差,测回间较差。
(2)方向观测法:用于三、四等三角网或二等低标三角网,测站应检核的限差有,半测归零差,一测回内2C 互差,同一方向各测回互差。
C 指的是视准轴不平行于水平轴误差,2C即2 倍视准轴误差。
方向观测法包括普通方向观测法、全圆方向观测法、分组方向观测法。
方向观测法1.普通方向观测法观测流程:选择目标清晰的方向为零方向,上半测回在盘左观测,先照准零方向,然后顺时针依次照准其他方向。
下半测回用盘右逆时针观测各方向,上下半测回合称一测回。
2.全圆方向观测法观测流程:上半测回依次观测了各方向之后再观测一次零方向。
当观测方向数大于 3 时应采用全圆方向观测法。
3.分组方向观测法:大于6 个方向时必须采用。
每组包含的方向数应大致相等;组之间要联测两个共同方向,其中一个方向应是共同的零方向。
(3)全组合测角法:是高精度水平角观测中必须采用的方法,应用在一等三角观测或高标上的二等三角观测。
指在测站周围应测的n 个方向中,每次取两个方向组成单角,用相同的测回数观测任意两个方向所能组成的全部单角的角度观测方法。
组合角个数:K=n(n-1)/2 (n为方向数)全组合观测法的基本要求二、成果超限观测值取舍:1.孤值与一大一小:除明显孤值(指某个观测值明显偏离其他观测值)外,应重测最大和最小的测回。
2.分群:观测成果随时间段不同而明显分群,则应重测全部测回。
三、重测和补测:因超限需要重新观测的完整测回称为重测。
因对错度盘、测错方向、读记错误或因中途发现条件不佳等原因而放弃的测回,重新观测时,称为补测。
•一测回中,如重测方向数超过所测方向总数的1/3 时,应重测全部测回。
•零方向超限时,需重测全部测回。
•在一个测站上,若基本测回重测的方向测回数,超过全部的方向测回总数的 1/3时,则该份成果全部重测。
水平角观测的方法水平角观测方法一般根据观测的精度要求和目标的数目来定。
常用的测角方法有测回法和方向观测法。
(一)测回法测回法适用于观测只有两个方向之间的水平角,如图2-18所示,经纬仪安置在测站点O上,对中整平后按下述步骤进行水平角观测:图2-18 测回法水平角观测(1)经纬仪置于盘左位置。
所谓盘左(或称正镜),即观测者面对望远镜目镜,竖直度盘在望远镜的左侧。
(2)精确瞄准起始目标A并配置度盘。
配置度盘的目的是为了减小度盘刻划误差的影响并且也方便计算。
各测回之间起始目标的读数间隔应在180º/n(n为测回数)。
装有度盘变换手轮的经纬仪和装有复测卡的经纬仪配置度盘时有所不同,各自配置度盘方法如下:Ⅰ. 装有度盘变换手轮的经纬仪,使用这种仪器时,应先瞄准目标,后配置度盘。
其方法是:先盘左瞄准起始目标(如图2-18中的目标A),打开手轮护盖(有的仪器是按下手轮盖),转动手轮,直至读数窗看到所需读数,然后关好手轮护盖(或弹回手轮盖)Ⅱ. 装有复测器的经纬仪,使用这种仪器时,应先配置度盘,后瞄准目标。
其方法是:转动测微手轮,调节好测微尺上的分、秒读数,松开照准部制动螺旋,转动仪器直至在读数窗看到所需读数位于双指标线附近,制动照准部,调节照准部微动螺旋使双指标线精确对准所需读数。
扳下复测卡,然后再转动仪器(这时读数窗中的读数不会变化),精确瞄准起始目标,扳上复测卡。
但是应当注意,在转动度盘变换手轮和使用复测卡时往往会使经纬仪发生微小变动。
因此在读数前应仔细检查是否发生了变动,如存在则以实际为准。
完成上述工作后,观测员即可读取目标A的盘左水平度盘读数A左=0º01′12″,每次读数后记录员须回报确认无误后将该读数记入手簿。
见表2-1(3)松开照准部制动螺旋,顺时针旋转照准部,照准目标B,读取水平度盘读数B左=60º20′24″,记入观测手簿。
以上观测过程称为上半个测回,其观测角值β左=B左-A左= 60º19′12″。