基于变结构控制理论的导弹平滑导引律研究
- 格式:pdf
- 大小:730.05 KB
- 文档页数:4


基于变结构控制的空空导弹末制导律研究基于变结构控制的空空导弹末制导律研究引言:空空导弹是现代战斗机装备的重要武器之一,其在空中战斗中具有重要的作用。
随着科技的进步,导弹制导律的研究也越发重要。
在现代战斗机的发展过程中,变结构控制技术被广泛应用于导弹末制导律的设计中,以提高导弹的制导精度和性能。
本文将从变结构控制的基本原理和应用入手,研究空空导弹末制导律的设计和优化方法。
一、变结构控制的基本原理变结构控制是一种在不同工况下采用不同的控制结构的方法,其核心思想是通过切换控制律的结构以适应不同的工况,从而提高系统的稳定性和鲁棒性。
由于空空导弹在飞行过程中受到各种扰动的影响,变结构控制技术可以有效地应对这些不确定性,提高导弹的制导精度和打击效能。
二、空空导弹末制导律的设计方法1. 基于模型的设计方法基于模型的设计方法是通过数学模型来描述导弹的运动和控制方程,然后根据系统的要求和性能指标设计相应的制导律。
这种方法需要对导弹系统进行详细的建模和参数辨识,然后利用线性控制理论和最优控制理论来设计制导律。
这种方法能够得到较为精确的制导律,在一定范围内能够满足导弹的性能要求。
2. 基于经验的设计方法基于经验的设计方法是通过试验和仿真等手段得到导弹系统的性能和特性,然后根据经验设计相应的制导律。
这种方法不需要系统的详细建模和参数辨识,可以快速地设计制导律。
但是由于缺乏精确的数学模型,制导性能可能不如基于模型的设计方法。
三、空空导弹末制导律的优化方法1. 仿生优化方法仿生优化方法是一种模拟生物进化过程来优化系统性能的方法,通过模拟自然选择、突变和遗传等过程,来搜索最优解。
在空空导弹末制导律的优化中,可以利用仿生优化方法来寻找最佳的制导律参数,从而使导弹的制导精度和性能得到进一步提高。
2. 神经网络优化方法神经网络优化方法是一种通过人工神经网络来模拟系统的学习和适应能力,从而优化系统的性能的方法。
在空空导弹末制导律的优化中,可以利用神经网络优化方法来训练神经网络模型,从而得到最佳的制导律。

基于不确定性的末制导初始参数优化设计方法张海瑞; 王浩; 王尧; 洪东跑; 卜奎晨【期刊名称】《《国防科技大学学报》》【年(卷),期】2019(041)006【总页数】6页(P33-38)【关键词】末制导; 多目标优化; 不确定性优化; 高效全局优化【作者】张海瑞; 王浩; 王尧; 洪东跑; 卜奎晨【作者单位】中国运载火箭技术研究院北京100076【正文语种】中文【中图分类】TJ765.3无动力滑翔飞行器进入末制导阶段的初始参数是影响其打击效果的关键因素之一[1],不同的末制导初始参数可能会导致不同的弹道成型及落点分布结果。
在这里,末制导初始参数定义为末制导交班点的状态参数。
在实际飞行过程中,飞行器末制导初始参数,即末制导初始位置、初始速度、初始弹道倾角及初始航向角等,受到诸多不确定性因素的影响,往往表现出一定的不准确性或者波动性[2],进而影响飞行器弹道成型及落点分布。
因而,有必要考虑飞行器末制导初始参数不确定性的影响,开展基于不确定性的末制导初始参数优化设计研究。
在精确打击飞行器制导律等方面已有了大量的研究[3-4],而对不确定性影响下初始参数优化设计的研究较少。
常规弹道飞行器在再入过程中全程采用末制导律,既有利于导引头工作,实现转末制导的平滑交接,又可克服再入过程的各种干扰。
而对于新型高超声速临近空间飞行器来说,其一般采用中段制导+末制导方案,其末制导交班点的选择以及初始参数的波动性将会对末制导精度带来影响,本文针对此问题开展相关研究。
针对末制导初始参数不确定性的影响,常规方法通常采用蒙特卡洛方法对某一组初始参数方案进行随机模拟试验,经统计满足落点圆概率偏差(Circular Error Probability, CEP)要求即可,而未能实现飞行器末制导初始参数的优化设计以及落点精度的提升。
针对这一问题,本文提出基于不确定性的末制导初始参数优化设计方法,利用高效全局优化和蒙特卡洛方法给出末制导初始参数及其制导律参数的最优设计方案。
第40卷第4期2018年8月指挥控制与仿真CommandControl&SimulationVol 40㊀No 4Aug 2018文章编号:1673⁃3819(2018)04⁃0101⁃03滑模变结构导引律在防空反导技术中的应用杨云刚1,刘钧圣1,杨㊀敏2,段辰璐1,胡国怀1(1 西安现代控制技术研究所,陕西西安㊀710065;2 西安北方光电科技防务有限公司,陕西西安㊀710043)摘㊀要:针对防空反导末制导段攻击机动目标的问题,以零化弹目视线角速率为依据,设计了一种性能较好的滑模变结构导引律㊂该导引律在攻击机动目标时具有较高的制导精度,整个攻击过程的弹目视线角速率变化较小,有效解决了抖振问题,同时实现了导弹法向过载的合理分配㊂仿真结果验证了该导引律的有效性㊂关键词:防空反导;末制导;机动目标;滑模变结构导引律中图分类号:E926 4㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀DOI:10.3969/j.issn.1673⁃3819.2018.04.022ApplicationofSlidingModeVariableStructureGuidanceLawinAirDefenseandAnti⁃missileTechnologyYANGYun⁃gang1,LIUJun⁃sheng1,YANGMin2,DUANChen⁃lu1,HUGuo⁃huai1(1 Xi anModernControlTechnologyResearchInstitute,Xi an710065;2 Xi anNorthElectro⁃opticScientific&TechnologyCo.,LTD,Xi an710043,China)Abstract:Aimingattheproblemofmaneuveringtargetsintheterminalguidancesectionoftheairdefensemissile,aslidingmodevariablestructureguidancelawwithgoodperformanceisdesignedonthebasisofzeroingthelineofsightrate.Thisguidancelawhashigherguidanceaccuracyforattackingmaneuveringtarget,andthelineofsightanglerateissmallinthewholeattackprocess,thebuffetingproblemissolvedeffectively,andmissilenormaloverloadisreasonablydistributedaswell.Thesimulationresultsverifytheeffectivenessofthisguidancelaw.Keywords:airdefenseandanti⁃missile;terminalguidance;maneuveringtarget;slidingmodevariablestructureguidancelaw收稿日期:2017⁃12⁃10修回日期:2018⁃02⁃01作者简介:杨云刚(1987⁃),男,陕西宝鸡人,工程师,研究方向为导弹总体设计㊂刘钧圣(1979⁃),男,研究员级高级工程师㊂㊀㊀随着科学技术和军事装备水平的发展,现代防空导弹武器系统所面临的目标威胁也日益复杂化,如何有效防御敌方航空器㊁来袭导弹已成为战场防御㊁保护己方军事设施的关键问题㊂经过几十年的发展,美国分批次建立了不同拦截高度的导弹防御系统[1], 爱国者 (PAC⁃3)和 标准⁃3 (SM⁃3)等已经形成完整火力拦截体系[2]㊂俄罗斯㊁日本㊁以色列等国家也都在积极发展各自的防空反导技术㊂制导精度的提高可大幅度提高防空导弹战斗部毁伤效果,导弹导引律的研究,特别是导弹末制导段导引律及其控制的研究已经成为防空反导技术的关键㊂从工作原理和处理方法上可将导引律分为古典导引律(如三点法㊁比例导引法㊁前置量法等)和现代导引律(最优导引律㊁微分对策导引律㊁自适应导引律等)㊂前者需要的信息量少,结构简单,容易实现;而后者利用现代控制理论的方法进行设计,能对机动目标等实现较高的制导精度㊂经典比例导引律是攻击非机动目标的最优导引律,可以实现非机动目标视线角速度的零化,但在攻击机动目标时其性能会急剧下降[3],其改进型在攻击具有强对抗性㊁大机动的目标时,也可能产生很大的脱靶量[4]㊂滑模变结构控制对外界干扰和自身摄动均具有某种程度上的自适应性[5],而且滑动模态对摄动的不变性十分有益于控制系统的设计,滑模变结构导引律在拦截高机动目标时具有优良的性能[6]㊂本文针对空中机动目标,以零化弹目实现角速率为依据,采用滑模变结构控制理论,设计了一种应用于防空导弹末制导段的滑模变结构导引律,并对抖振现象采取了有效的解决措施,提升了防空导弹末制导段的整体性能㊂1㊀弹目相对运动关系考虑纵向攻击平面内的导弹和目标运动关系,如图1所示㊂其中,r为弹目相对距离,vM为导弹速度,θM为导弹弹道倾角,q为弹目视线角,vT为目标速度,θT为目标航迹角㊂由图1可得弹目相对运动关系方程组如下:㊀̇r=vTcos(q-θT)-vMcos(q-θM)ṙq=vMsin(q-θM)-vTsin(q-θT){(1)102㊀杨云刚,等:滑模变结构导引律在防空反导技术中的应用第40卷图1㊀弹目相对运动关系2㊀滑模变结构导引律设计2 1㊀导引律设计对式(1)中第二式进行微分,并将第二式代入,可得2̇ṙq+r㊆q=-vṀθMcos(q-θM)+̇vMsin(q-θM)+vṪθTcos(q-θT)-̇vTsin(q-θT)(2)取u=θ㊃M为控制项,则由式(2)可得u=̇vMsin(q-θM)-2̇ṙq-r㊆q+dvMcos(q-θM)(3)其中d=vTθ㊃Tcos(q-θT)-̇vTsin(q-θT)为目标机动项㊂为了实现滑模变结构控制,首先需要选择设计一个滑模切换平面,以迫使系统在一定特性下沿规定的状态轨迹作小幅度㊁高频率的上下运动,即所谓的 滑模 运动㊂根据准平行接近原理,希望在制导过程中视线角速度逐渐趋近于零,因此设计切换函数为s=̇q(4)当系统在有限时间内到达切换平面后进入滑动模态,弹目视线角速率̇qң0,而合理的趋近律可以使系统具有良好的动态品质㊂选取具有自适应特性的指数趋近律[7]:̇s=-k|̇r|rs-εrsgn(s)(5)其中,k>0,ε>0㊂当弹目距离r较大时,系统趋近速度较慢;而当弹目距离r趋近于0时,系统趋近速度迅速上升,这样不仅减小了系统趋近滑模面的时间,而且能够保证̇q不发散,从而有利于提高制导精度㊂理想的滑动模态实际上是不存在的,现实中的滑动模态一般都会伴随有一定的抖振㊂为了削弱抖振现象,应该在增大k的同时减小ε㊂将式(4)和(5)代入式(3),可得滑模变结构导引律为u=(k+2)|̇r|s+εsgn(s)+̇vMsin(q-θM)+dvMcos(q-θM)(6)由于目标的机动特性一般很难准确获取,因此将其当作干扰项处理,于是上述导引律可简化为u=(k+2)|̇r|s+εsgn(s)+̇vMsin(q-θM)vMcos(q-θM)(7)2 2㊀稳定性分析应用Lyapunov方法对系统稳定性进行分析㊂选择Lyapunov函数为V=s㊃s2>0(8)则̇V=ṡs=-k|̇r|rs2-εrssgn(s)<0(9)即系统是Lyapunov意义下渐进稳定的㊂2 3㊀抖振削弱引入双曲正切函数代替符号函数,并将导引律中开关项系数调整为随弹目距离减小而减小,即ε=a+br(10)tanh(s)=es-e-ses+e-s(11)其中,a>0,b>0,将式(10)和(11)代入导引律(7)得u=(k+2)|̇r|s+(a+br)tanh(s)+̇vMsin(q-θM)vMcos(q-θM)(12)该导引律通过调整系数a,b,可以加快系统进入滑模面的速度,双曲正切函数可以使系统连续的在滑模面上进行切换,从而减小了抖振,有利于提高导弹末制导段的整体性能㊂3㊀仿真分析对导弹末制导段的导引律进行数学仿真,仿真参数设置为:将开始导引瞬间导弹的位置设为坐标系原点,初始弹目距离r0=3000m,导弹追击速度为vM=600m/s;目标速度vT=300m/s,并作蛇形机动,目标法向加速度为aT=10cos(2t)g;导引头盲区为100m,导弹进入盲区后弹目视线角速率置为0㊂仿真结果如图2-6所示㊂图2㊀弹目轨迹第4期指挥控制与仿真103㊀图3㊀弹目轨迹命中点局部放大图4㊀弹目视线角速率图5㊀弹目视线角图6㊀法向过载㊀㊀从图2可以看出,为抑制弹目视线角速率的变化,滑模变结构导引律的弹道曲线比比例导引机动幅度大;如图3所示,对于机动目标,滑膜变结构导引律制导精度(脱靶量为0 01m)明显高于比例导引(脱靶量为0 5m);如图4所示,弹目距离越近,比例导引的弹目视线角速率越大,而滑模变结构导引律能够使系统快速进入滑模面,从而弹目视线角速率始终维持在一个较小的范围内,同理其弹目视线角变化比比例导引小的多(图5)㊂滑模变结构导引律这一优点对于控制系统的稳定性尤为重要㊂由图6可知,滑模变结构导引律从末制导段开始就使导弹以较大的过载追随目标机动,且在接近目标过程中,其法向过载也逐渐小于比例导引,因而实现了整个追击过程过载的合理分配㊂4㊀结束语本文针对防空反导问题,应用滑模变结构控制理论,设计了一种滑模变结构导引律㊂该导引律在末制导段开始就能快速使系统进入滑模面,从而将弹目视线角速率限定在一个较小的范围内,并有效解决了抖振问题,实现了整个攻击过程导弹过载的合理分配,提高了导弹末制导精度㊂本文设计的滑膜变结构导引律弹道曲线比比例导引弯曲,这是进一步研究的工作重点㊂本文的研究对于防空反导技术的发展有一定参考价值㊂参考文献:[1]㊀梁百川.美国导弹防御系统的发展[J].航天电子对抗,2008,24(3):1⁃4.[2]㊀金林.弹道导弹防御系统综述[J].现代雷达,2012,34(12):1⁃6.[3]㊀高峰,唐胜景,师娇,郭杰.一种改进的自适应滑模变结构导引律[J].弹道学报,2013,25(3):19⁃23.[4]㊀王亚飞,方洋旺,周晓滨.比例导引律研究现状及其发展[J].火力与指挥控制,2007,32(10):8⁃11.[5]㊀ZhouDi,MuChun⁃di,XuWen⁃li.Adaptivesliding⁃modeguidanceofahomingmissile[J].JournalofGuidance,ControlandDynamics,1999,22(4):589⁃594.[6]㊀郭建国,周凤岐,周军.基于零脱靶量设计的变结构末制导律[J].宇航学报,2005,26(2):152⁃155,216.。
导弹积分型滑模过载控制稳定性研究顾文锦雷军委冯国虎(海军航空工程学院自动控制系 山东烟台 264001)摘要针对导弹过载控制系统,考虑了导弹舵机的一阶动态特性,引入一类积分型滑模面,设计变结构控制律,对导弹的过载和角加速度进行控制。
然后构造Lyapunov函数证明其稳定性,并举例进行仿真研究,仿真结果表明了该方法比文献[6]中方法有更好的鲁棒性和快速性。
在此基础之上,考虑工程应用的需要,提出了一种形式简单的控制规律,减少了控制信号的计算量。
文末仿真结果表明了该方法的优良控制效果。
关键词过载控制变结构控制滑模面稳定性近年来,随着武器装备的发展,高性能的导弹倍受人关心。
导弹的高性能主要体现在机动性上,而导弹的机动性则取决于导弹的大过载跟踪能力。
因此导弹的过载控制引起了越来越多研究者的重视。
而导弹大空域机动时,特别时超音速导弹,为提高导弹射程,而进行高低空混和弹道飞行时,气动参数相差悬殊高达5-8倍,因此控制器的鲁棒性在设计中尤为重要[1]。
常规PID控制难以满足鲁棒性需要,而变结构控制由于滑动模态的存在,使系统对参数的变化和外界干扰具有很强的鲁棒性,特别适用于时变系统及非线性系统。
因此不少学者尝试将变结构控制应用于导弹控制系统设计当中。
对于尾控型导弹,从控制舵偏到导弹加速度之间的动力学存在非最小相位特性[2-6]。
因此,如何解决非最小相位问题是当前控制领域研究的一个热点。
文献[2]采用了基于状态反馈的逆控制方法设计控制器对攻角进行控制。
文献[3]采用了输出重定义技术和逆控制方法来稳定零动态。
Lee and Ha [4] 采用了部分线性化和奇异摄动技术,实现了输入输出的精确线性化。
Chwa and Choi [5] 采用了函数近似技术和反馈线性化方法设计控制器,将导弹动力学模型转化为参数仿射模型。
这些方法尽管解决了非最小相位问题,但由于引入了姿态量的控制会类似于传统的姿态控制方法,使导弹机动性能变差,失去了加速度控制的意义。
文章编号:1008-2956(2004)02-0042-04基于状态反馈的导弹滚转通道变结构控制姜会霞,孟晨,方新,侯继业(军械工程学院导弹工程系,河北石家庄 050003)摘要:针对导弹滚转通道参数时变性和快速性要求,提出了一种易于实现状态反馈变结构控制器的设计。
将系统分为确定部分和不确定部分,然后分别对这两部分进行变结构控制。
结果表明,适当的校正规则不仅保证滑模的存在,而且具有对参数扰动和外部扰动的不变性;状态信号的反馈提高了滚转通道的响应能力;伪滑模大大削减了变结构控制的抖动。
并通过仿真证明了该方法的正确性和有效性。
关键词:滚转通道;状态反馈;变结构控制中图分类号:TJ765 文献标识码:A防空导弹攻击的是高速大机动的空间目标,因此通常采用俯仰和偏航双通道进行控制。
为了减少通道之间的相互交连作用,提高导弹的制导精度,必须稳定弹体以免弹体绕弹轴滚动。
导弹的滚动通道是使弹上的执行坐标稳定在导弹发射的初始位置,使其与地面的测量坐标相一致,同时消除滚动方向由于干扰力矩引起的姿态角误差,以减小弹体滚动对纵向运动的耦合效应。
导弹的飞行状态不断变化而且在空间的运动要受到来自各面的干扰,诸如大气中的扰动气流、制导系统所受到的干扰等,因此导弹滚转运动的传递函数是时变的而且具有不确定性扰动的系统,同时为了提高作战性能,系统必须具有快速反应能力[1,2]。
变结构控制是一种非线性控制,它通过设计适当的切换函数使系统产生滑动,从而实现对系统的控制。
变结构控制具有对内部参数的变化和外部扰动的不变性[3,4]。
针对防空导弹的上述问题,本文提出一种基于状态反馈的导弹滚转通道变结构控制器的设计方法。
1 基于状态反馈的变结构控制器的设计考虑单输入线性系统:~x (t )=A (t )x +b (t )u +D (t )d ,(1)式中,A (t )是n X n 时变系数矩阵;b (t )是n 维时变列向量;D (t )是n 维时变列向量;x (t )E R n 是状态变量,其初始条件是x (0)=x 0;u E R 是标量输入,即控制只加在对象的一个点上;d E R 是扰动项。
第22卷第3期海军航空工程学院学报V ol. 22 No.3 2007年5月 Journal of Naval Aeronautical Engineering Institute May. 2007收稿日期:2007-01-30基金项目:国家自然科学基金资助项目(60674090)作者简介:李静(1977−),女,博士生;胡云安(1966−),男,教授,博导,博士。
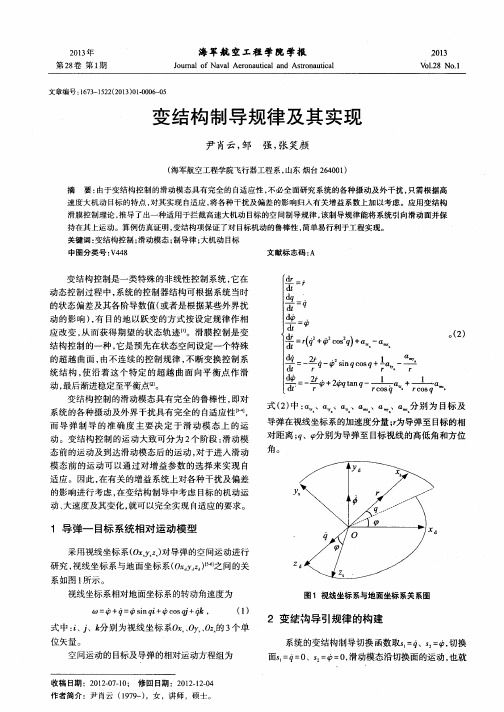
海 军 航 空 工 程 学 院 学 报 第22卷·314·导弹与目标之间相对运动方程可以表示为()()M M T T cos cos ϕϕ−−−=q v q v r, (1) ()()M M T T sin sin ϕϕ−+−−=q v q v qr 。
(2) 2 导引律设计现将式(2)两端对时间求导,并将式(1)代入可得 ()()()()。
M M M T T T M M T T cos cos sin sin 2ϕϕϕϕϕϕ−−−+−+−−=+q v q v q v q v q r q r(3)由于目标和导弹的过载分别可以表示为 T T T n v =−ϕ,且M M M n v =−ϕ ,所以式(3)可以写成 ()()()()。
cos cos sin sin 2M M T T M M T T ϕϕϕϕ−+−−−+−−=+q n q n q v q v q r q r(4)根据准平行接近原理,希望q在制导过程中趋于零。
因此,选取滑动模态为q r S =。
(5) 选取李雅普诺夫函数为 221S V =, (6)则)(q r q r S S S V+==。
(7) 将式(4)代入式(7),可得()()()()()()()()()T T M M T T M M T T M M T M M sin sin cos cos sin sin cos cos T VSS S rq rq S rq v q v q n q n q rS S vq rvq n q n q ϕϕϕϕϕϕϕϕ==+=−−−+−⎡⎣−−+−=⎤⎦⎡−−−+⎢⎣−−−+⎤−⎥⎦。
(8)在目标切向加速度和目标机动等信息已知的情况下,也即式(8)中的T T n v 、和T ϕ已知时,可选导弹的过载为()()()()(),sign cos sin sin cos 121T T T M M M M ⎥⎦⎤++−⎢⎣⎡−−−−+−−−=S k S k q n q v q v S r r q n T ϕϕϕϕ (9) 式中:0021>>k k ,。
只要导弹朝着目标发射,则()0cos ≠−M q ϕ,因此式(9)是非奇异的,代入式(8)可得()[]0sign 22121≤−−=−−=S k S k S k S k S V , 从而qr S =收敛,保证了导弹成功截获目标。
因此导引律设计为()()()()(),sign cos sin sin cos 121T T T M M M M ⎥⎦⎤++−⎢⎣⎡−−−−+−−=S k S k q n q v q v S r r q v T M ϕϕϕϕϕ(10) 式中:1k 、2k 表示变结构导引系数。
由于导引律式(10)中存在符号函数项,导致导弹视线角的抖振现象。
通过边界层()B t 的引入(如图2所示),虽然可以消除导弹的抖振现象,但却是以牺牲导引精度为代价,使得导引律从精确跟踪()0e t =过渡到跟踪精度为()e t ξ≤,其中ξ为边界层()B t 的宽度。
即用饱和函数()⎪⎩⎪⎨⎧>≤<−−≤−=1/11/1/1/1/sat ΦΦΦΦΦS S S S S ,,,其中:Φ为边界层的厚度,来代替式(10)中的符号函数sign()S 。
边界层方法中Φ选取不易掌握,一旦选取过小,则抑制抖动的效果不明显;若选取过大,此时导引律不再属于变结构导引律,就失去了变结构导引律所具有的鲁棒性强的优点。
图2 振荡和边界层针对上述缺陷,我们引入双曲正切函数来代替导引律式(10)中的符号函数,因为双曲正切曲线()tanh y x =具有关于原点对称,原点处曲线斜率为1,并以1y =±为渐近线的特性,如图3所示。
图3 双曲正切函数tanh y x =的曲线轨迹第3期 李 静等:基于变结构控制理论的导弹平滑导引律研究·315·由图3可以看出,通过改变双曲正切函数曲线在原点处的曲线斜率,双曲正切函数曲线可以很好地逼近符号函数。
因此通过引入式(11)来消除变结构导引律中所存在的抖动问题,即sin h ()tanh()cosh()S S S S S e e S S e e εεεεεεε−−−==+, (11) 式(11)中,0ε>,调整ε的取值,可以改变双曲正切曲线在原点处的斜率。
因此所设计的变结构导引律不再需要不连续地进行穿越滑动面的开关转换,并且参数ε的选取较饱和函数中Φ的选取更易掌控,不易引起导引律的巨大变化。
平滑导引律如下式所示()()()()()M M M M T T T T 121cos sin sin cos tan h /M v q rS v q v q r n q k S k S ϕϕϕϕϕε=−⎡−+−−−−⎢⎣⎤−++⎥⎦。
(12) 3 仿真研究假设目标T 作蛇行机动,运动轨迹如图4所示,其初始位置和运动参数分别为:=0T x 28 000 m ,=0T y 2 050 m ,T0386A = m ,=T ϖ0.942 8 rad/s ,1035T ±=n ,T 40050x v =± m/s ,8.3630T −=y v m/s ,05.00T =ϕ rad 。
x 10416001800200022002400260028003000x(m)y(m )图4 目标运动轨迹若攻击导弹M 仅采用比例导引律,且导弹M 初始位置和运动参数分别为:=0M x 8 000 m ,500M =y m ,M 960v = m/s ,比例导引系数为43=k 。
经仿真,其脱靶量变化曲线如图5 a )所示。
若攻击导弹M 仅采用变结构导引律时,其初始位置和运动参数为:=0M x 8 000 m ,500M =y m ,M 960v = m/s ,01.01=k ,01.02=k 。
经仿真,其脱靶量变化曲线如图5 b )所示。
若导弹M 采用本文提出的平滑导引律,且导弹初始条件相同的情况下,选定系数01.01=k ,01.02=k ,0.1ε=。
经仿真,其脱靶量变化如图5 c )所示。
仿真结果对比见表1。
152000.511.522.54t(s)mi s s (m )a )攻击导弹采用比例导引律1.21.31.41.51.61.71.81.922.14t(s)mi s s (m )b )攻击导弹采用变结构导引律202500.511.522.54t(s)mi s s (m )c )攻击导弹采用平滑导引律图5 脱靶量变化曲线 表1 脱靶量对比表脱靶量/s导引时间/s 比例导引律变结构导引律平滑导引律t =38.54297.5 128.99 0.46从表1可以看出:在相同的仿真时间内,导弹采用平滑导引律的脱靶量最小,从而说明采用本文提出基于变结构控制理论的导弹平滑导引律能够准确地击中做大机动的目标。
x /mt /st /st /sy /mm i s s /mm i s s /mm i s s /m海军航空工程学院学报第22卷·316·4 结束语针对导弹采用变结构导引律攻击机动目标时,视线倾角增量变化律的来回切换产生抖动的缺陷,基于变结构控制理论,提出了一种设计简单、具有很好鲁棒性及准确性的平滑导引律。
通过仿真比较验证了:在相同时间内该导引律的脱靶量明显小于比例导引、变结构导引,且弹道平滑,结构简单,易于工程实现。
参考文献:[1] 周荻. 寻的导弹新型导引规律[M]. 北京: 国防工业出版社, 2002:1-10.[2] 吴进华, 童红俊, 李晓东. 攻击大机动目标的L2RG研究[J]. 海军航空工程学院学报, 2006,21(5):501- 505.[3] 李静. 导弹导引律和突防方法研究[D]. 烟台: 海军航空工程学院, 2005.[4] 左斌, 杨长波, 李静. 基于微分对策的导弹攻击策略[J]. 海军航空工程学院学报, 2005,20(5):524-526. [5] 周荻, 慕春棣, 徐文立. 空间拦截智能自适应变结构导引规律研究[J]. 宇航学报, 1999,20(4):60-65.[6] Lu Ping TSAO, Ching Show LIN. A New OptimalGuidance Law for Short-Range Homing Missiles[J].Proc. Natl. Sci. Counc. ROC(A)., 2000,24(6):422-426. [7] Tal Shima, Josef Shinar. Time-Varying LinearPursuit-Evasion Game Models with Bounded Controls[J]. Journal of Guidance, Control, and Dynamics, 2002,25(3):425-433.[8] 顾文锦, 赵红超. 变结构控制在导弹制导中的应用综述[J]. 飞行力学, 2005,23(1):1-4.[9] Brierley S D, Longchamp R. Application ofSliding-Mode Control to Air-Air Interception Problem[J]. IEEE Transactions on Aerospace and Electronic Systems, 1990,26(2):306-325.[10] Zhou Di, Mu Chundi, Ling Qiang, Xu Wenli. OptimalSliding-Mode Guidance of a Homing Missile[C]// Decision and Control Proceedings of the 38th IEEEConference. 1999:7-10.[11] Hsu L. Smooth Sliding Control of Uncertain SystemsBased on a Predication Error[J]. International Journalof Robust and Nonlinear Control, 1997,7(4):353-372. [12] Kaynak O, Rudas I J. Application of ComputationalIntelligence Methodologies in Sliding Mode Control[C]//Proceedings of IFAC 14th Triennial WorldCongress, Beijing: 1999,Vol. Q:347-352.Research on the Smoothness Guidance LawBased on Variable Structure Control TheoryLI Jing a,ZUO Bin a,HU Yun-an b(Naval Aeronautical Engineering Institute a.Graduate Students’ Brigade;b.Department of Control Engineering,Yantai Shandong 264001,China)Abstract: When the missile using the variable structure guidance (VSG) law attacks the target with maneuver, the chattering of line-of-sight angular rate always happens. The smoothness guidance law based on variable structure control theory is presented to solve the problem. Moreover, this guidance law has good robustness and precision. This guidance law avoids the chattering of line-of-sight angular rate of attack missile by introducing the hyperbolic tangent function. The simulation results show that the smoothness guidance law reduces the miss distance of attack missile in the same attack time. And the results validate its effectiveness. Key words:variable structure control theory; guidance law; hyperbolic tangent function; boundary layer。