滑模变结构控制系统的基本设计步骤(2014)
- 格式:pdf
- 大小:872.61 KB
- 文档页数:11


滑模变结构理论一、引言滑模变结构控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性,这种控制策略与其它控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。
由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辩识,物理实现简单等优点。
该方法的缺点在于当状态轨迹到达滑模面后,难于严格地沿着滑模面向着平衡点滑动,而是在滑模面两侧来回穿越, 从而产生颤动。
滑模变结构控制出现于20世纪50年代,经历了 50余年的发展,已形成了一个相对独立的研究分支,成为自动控制系统的一种一般的设计方法。
以滑模为基础的变结构控制系统理论经历了 3个发展阶段.第1阶段为以误差及其导数为状态变量研究单输入单输出线性对象的变结构控制; 20世纪60年代末开始了变结构控制理论研究的第2阶段, 研究的对象扩大到多输入多输出系统和非线性系统;进入80年代以来, 随着计算机、大功率电子切换器件、机器人及电机等技术的迅速发展, 变结构控制的理论和应用研究开始进入了一个新的阶段, 所研究的对象已涉及到离散系统、分布参数系统、滞后系统、非线性大系统及非完整力学系统等众多复杂系统, 同时,自适应控制、神经网络、模糊控制及遗传算法等先进方法也被应用于滑模变结构控制系统的设计中。
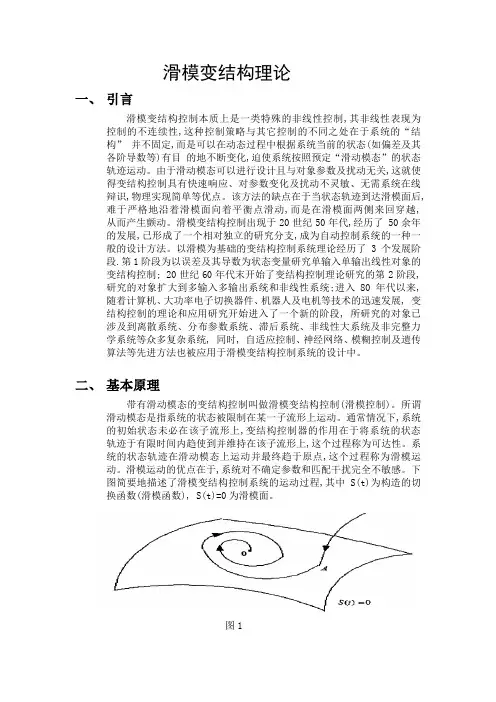
二、基本原理带有滑动模态的变结构控制叫做滑模变结构控制(滑模控制)。
所谓滑动模态是指系统的状态被限制在某一子流形上运动。
通常情况下,系统的初始状态未必在该子流形上,变结构控制器的作用在于将系统的状态轨迹于有限时间内趋使到并维持在该子流形上,这个过程称为可达性。
系统的状态轨迹在滑动模态上运动并最终趋于原点,这个过程称为滑模运动。
滑模运动的优点在于,系统对不确定参数和匹配干扰完全不敏感。
下图简要地描述了滑模变结构控制系统的运动过程,其中S(t)为构造的切换函数(滑模函数), S(t)=0为滑模面。
滑模变结构控制简介变结构控制(VSC: Variable Structure Control)本质上是一类特殊的非线性控制,其非线性表现为控制的不持续性,这种控制策殆与其它控制的不同的地方在于系统的“结构”并非固定,而是能够在动态进程中,按照系统当前的状态(如误差及其各阶导数等),有目的地不断转变,迫使系统依照预定“滑动模态”的状态轨迹运动,所以又常称变结构控制为滑动模态控制(SMC: Sliding Mode Control),即滑模变结构控制。
由于滑动模态能够进行设计且与对象参数及扰动无关,这就使得变结构控制具有快速响应、对参教转变及扰动不灵敏、无雷系统在线辩识,物理实现简单等长处。
该方式的缺点在于当状态轨迹抵达滑模面后,难于严格地沿着滑面向着平衡点滑动,而是在滑模面双侧来回穿越,从而产生哆嗦。
变结构控制出现于50年代,经历了4()余年的进展,已形成了一个相对独立的研究分支,成为自动控制系统的一种一般的设计方式,适用于线性与非线性系统、持续与离散系统、肯定性与不肯定性系统、集中参数与散布参数系统、集中控制与分散控制等。
而且在实际工程中逐渐取得推行应用,如电机与电力系统控制、机械人控制、飞机控制、卫星姿态控制等尊。
这种控制方式通过控制長的切换使系统状态沿薈滑模面滑动,使系统在受到参数摄动和外干扰的时候具有不变性,正是这种特性使得变结构控制方式受到各国学者的重视。
变结构控制进展历史变结构控制的迸展进程大致可分为三个阶段:(1)1957-1962 年此阶段为研究的低级阶段。
前苏联的学者Utkin和Emelyanov在五十年代提出丁变结构控制的槪念,大体研究对象为二阶线性系统。
(2)1962-1970 年六十年代,学者开始针对高阶线性系统进行研究,但仿然限于单输入单输出系统。
主要讨论丁高阶线性系统在线性切换函数下控制受限与不受限良二次型切换函数的情形。
(3)1970年以后在线性空间上研究线性系统的变结构控制。
滑模控制(sliding mode control, SMC)也叫变结构控制, 其本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性. 这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动. 由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得滑模控制具有快速响应、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点.滑模变结构控制是根据系统所期望的动态特性来设计系统的切换超平面,通过滑动模态控制器使系统状态从超平面之外向切换超平面收束。
系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统原点,这一沿切换超平面向原点滑动的过程称为滑模控制。
由于系统的特性和参数只取决于设计的切换超平面而与外界干扰没有关系,所以滑模变结构控制具有很强的鲁棒性。
超平面的设计方法有极点配置,特征向量配置设计法,最优化设计方法等,所设计的切换超平面需满足达到条件,即系统在滑模平面后将保持在该平面的条件。
控制器的设计有固定顺序控制器设计、自由顺序控制器设计和最终滑动控制器设计等设计方法[1]。
现在以N维状态空间模型为例,采用极点配置方法得到M(N<M)维切换超平面,控制器采用固定顺序控制器的设计方式,首先控制器控制任意点到Q1超平面(M维)形成M-1阶滑动模态,系统到达Q1超平面后由于该平面的达到条件而保持在该超平面上所以后面的超平面将是该超平面的子集;然后控制器采用Q1对应的控制规则驱动到Q1与Q2交接的Q12平面(M-1维)得到M-2滑动模态,然后在Q12对应的控制规则驱动下到Q12与Q3交接的Q123平面(M-2维),依次到Q123..m平面,得到最终的滑模,系统在将在达到条件下保持在该平面,使系统得到期望的性能。
滑模控制的优点是能够克服系统的不确定性, 对干扰和未建模动态具有很强的鲁棒性,尤其是对非线性系统的控制具有良好的控制效果。
目录永磁同步电机滑模变结构矢量控制 (1)1.1 研究背景 (1)1.2 国内外研究现状 (2)1.3 系统模型 (2)1.4 控制方法设计 (4)1.5 系统仿真 (5)1.6 结论 (7)参考文献 (8)永磁同步电机滑模变结构矢量控制1.1 研究背景永磁同步电动机(PMSM)具有结构简单、功率密度高、效率高等优点,在高精度数控机床、机器人等场所得到了广泛应用。
永磁同步电机最初是基于异步电动机转差角频率控制提出的,随着永磁电机的应用范围的扩大,其控制方法也被广泛地研究和探索,电力电子技术和微处理器的发展为永磁同步电机的控制提供了物质基础,现在主流的,有代表性的永磁同步电机的控制策略要属矢量控制和直接转矩控制。
矢量控制由德国西门子公司的EBlasschke等首先提出,其主要思想参考直流电机控制方案,基于磁场等效原则,通过矢量变换将定子电流矢量变换为两个在空间上相互垂直的直流量,将永磁同步电机等效为他励直流电机,从而摆脱交流电机非线性、强耦合的特性,简化控制算法,获得与直流电机一般的调速性能。
由于其控制策略采用磁场定向的方式,故矢量控制也被称为磁场定向控制。
直接转矩控制理论是Takahashi等人于20世纪80年代提出。
是继矢量控制技术之后的新型高性能交流变频调速系统,它以控制转矩为直接目的,将磁链作为被控对象,在定子坐标系下利用离散的两点式调节直接实现磁链计算与转矩控制,简化了控制系统,提高了快速响应能力。
由于其对转矩和磁链控制的直接性,这种控制方法被命名为直接转矩控制。
1997年,直接转矩控制的方法首次被移植到永磁同步电机中,并获得成功。
虽然直接转矩控制策略取得了极大进展,但仍存在着磁链和转矩脉动的问题,故其更广泛的应用仍待深入研究。
目前永磁同步电机控制使用最广泛的还是矢量控制策略,直接转矩控制在感应电机上的应用较为成熟,虽然有学者提出将矢量控制中的MTPA控制、弱磁控制与直接转矩控制结合的电动汽车驱动控制方案,但仍停留在理论,实际应用中仍有问题需要解决。
步骤一:确定状态变量(分为单输入系统和多输入系统)以及状态变量之间的关系比如永磁同步电机速度滑模变结构控制:状态变量为:状态变量之间的关系(可以通过电机的电压,磁链,转矩和运动学方程推导)比如确定如上x1,x2以及系统的关系,可根据如下方程(其中有错误注意):得到状态关系方程(其中a为常数与电机参数有关):永磁同步电机位置滑模变结构控制:状态变量为:步骤二:确定滑动面方程(切换函数S)必须确保滑动模态在S = 0时t趋近于无穷大是稳定的。
(根据实际情况确保品质参数),其表达式如下:这种切换函数下得到的响应是过阻尼响应,理论上是不存在超调量的。
对于多输入系统,其切换函数为:步骤三:方法一:确定趋近率函数(切换函数的微分S’),并确定滑模变结构控制的输出量即控制率函数Ux(Ux)。
另外,需要由电机方程指定该控制率函数和电机系统变量的关系(实际需要决定)(比如:速度滑模变结构的输出肯定是与电机电流iq是有关系的,从而便于下一步的电流逆变器的控制)。
常见的趋近率函数为:其他特殊的更常用的趋近律如下:如此可确定控制率函数的表达式。
(本质上控制率函数是用来去除系统参数变化和外部扰动对系统的影响。
)该方法的缺点是:由于系统在滑动面上对参数及系统外部扰动的抗干扰性很强。
而在滑动面外(趋近运动),控制率函数在起作用,而控制率函数是与系统参数有关的。
所以收到系统参数的影响。
为了能够实现系统一直具有很高的鲁棒性,可以使系统设置从初始时刻就处于滑动面上,见方法二(全局滑模变结构控制)。
方法二:合适选择切换函数并先确定控制率函数Ux。
(由于系统一直处于滑动面上,所以无需选择趋近率函数)比如PMSM的速度滑模变结构控制:上述条件一满足了在初始时刻系统就处于滑动面上。
常见的控制率函数选择(提高抗扰性的):在本例中为了保证系统一直处于滑动面上,需选择如下函数:其中Ueq是用来使在任何时间t,系统均处于滑动面上的,计算方法如上。