汽车侧翻稳定性与预警综述分解
- 格式:doc
- 大小:1.12 MB
- 文档页数:16
车辆侧翻稳定性研究现状与对策
高攀;陈世兴;邹胤;刘扬开;王文庆;李国杰
【期刊名称】《汽车文摘》
【年(卷),期】2022()7
【摘要】随着车辆电动化、智能化和网联化的发展,自动驾驶车辆的安全性不仅受到消费者的关注,也越来越成为工程师关注焦点,从统计数据看,碰撞和侧翻是车辆最为常见的安全事故,其中防碰撞性能是自动驾驶工程师的开发重点,侧翻事故概率虽不及碰撞,一旦发生便造成严重的生命和财产损失,由于其得到的关注也较少,侧翻原因较多,与环境、车辆、驾驶控制等众多因素相关。
在相关研究的基础上,系统总结了侧翻分类、侧翻稳定性评价指标以及影响因素分析,着重介绍了侧翻研究方法和防侧翻措施,以期对侧翻有一个全面的了解,旨在为智能化时代车辆侧翻稳定性研究方法和防侧翻控制提供参考和指导。
【总页数】8页(P5-12)
【作者】高攀;陈世兴;邹胤;刘扬开;王文庆;李国杰
【作者单位】广东技术师范大学工业实训中心;广东技术师范大学汽车与交通工程学院
【正文语种】中文
【中图分类】U461.1
【相关文献】
1.基于能量法的车辆侧翻稳定性动力学研究
2.油气悬架工程车辆的侧翻稳定性研究
3.车辆弯道行驶侧倾稳定性分析与侧翻预警研究
4.基于半主动空气悬架的重型车辆侧翻稳定性控制研究
5.重型车辆侧翻预警技术研究现状及发展趋势
因版权原因,仅展示原文概要,查看原文内容请购买。
车辆侧翻预警研究现状与关键技术随着车辆行驶速度的提高,车辆侧翻事故逐渐成为一种非常危险的交通事故形式。
在过去的几十年中,研究人员一直在积极探索车辆侧翻预警技术,以帮助驾驶员提前感知车辆侧翻的危险性,并采取相应的措施,从而避免潜在的危险。
目前,与车辆侧翻预警相关的研究已经取得了很大的进展。
首先,研究人员通过对车辆物理学特性的研究,建立了一系列数学模型来分析车辆侧翻可能发生的条件和原因,进而对车辆侧翻进行预测。
一些国家还推出了针对车辆侧翻的统计数据,对车辆侧翻事故发生的时空特征、车辆类型、驾驶员行为等因素进行综合分析与研究,通过预测车辆侧翻的趋势和规律,制定出更加有效的车辆侧翻预警策略。
其次,随着传感器技术的不断发展,车辆侧翻预警系统也得到了很大的改善。
现阶段,车辆侧翻预警系统可以采用多种传感器来监测车辆运动状态和周围环境的变化,如重力传感器、陀螺仪、GPS等。
通过对车辆运动状态和周围环境的持续监测,车辆侧翻预警系统能够及时发出警报,提醒驾驶员采取适当的措施。
最后,车辆侧翻预警技术的研究也包括了许多理论分析和仿真模拟研究。
通过分析车辆侧翻时的各种力学特性,研究人员可以提出更加有效的车辆侧翻预警策略,并通过仿真模拟技术对这些策略进行评估和优化。
总之,车辆侧翻预警技术的研究已经取得了很大的进展,但仍然存在一些挑战和难题。
未来,研究人员需要持续探索更加准确和有效的车辆侧翻预警技术,以保障交通出行的安全与可靠。
为了更好的实现车辆侧翻预警技术的应用,研究人员不仅需要深入了解车辆侧翻发生的机制和规律,还需要关注关键技术的发展和应用。
以下是一些关键技术的介绍:1. 数据采集与处理技术:为了较好地获得驾驶员和车辆的运动状态数据,需要使用先进的传感器设备来采集数据。
然后使用专业的数据处理技术对数据进行精细化分析处理,分析拟合模型得出有关警报触发信号的规律。
2. 算法优化技术:目前许多侧翻预警系统都采用了基于物理原理的模型来进行预测,但这种方法存在较大的局限性。
汽车侧翻稳定性与预警综述摘要:近年来,汽车侧翻事故作为重要的安全问题,受到越来越多的关注。
美国高速公路交通安全管理局统计数据表明,在汽车事故中,侧翻的危害程度仅次于碰撞事故居第二位。
然而,我国目前针对高速急转弯时汽车侧翻动态稳定性及预警方面的研究还很少。
因此,本文总结归纳了目前主流侧翻稳定性模型,侧翻预警的硬件系统与算法。
通过仿真来计算侧倾角,来得测算汽车侧翻稳定性。
以及时下最为新颖的通过DPS来获得汽车的侧倾角,横向加速度等数据来预警。
本文比较了各种方案的利弊,对目前汽车的侧翻稳定性分析及预警研究做了一定程度的综述。
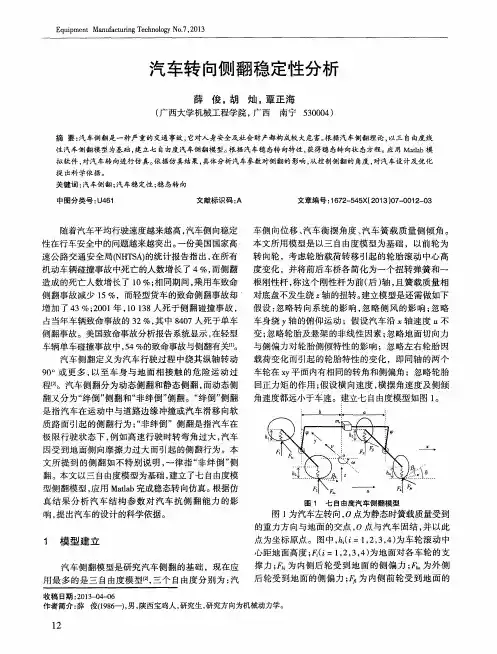
关键字:侧翻模型,侧翻控制器,预警算法,侧翻仿真,GPS侧翻控制系统Abstract: in recent years, the most important safety problems as vehicle rollover accident, has attracted more and more attention. High U.S.Highway traffic safety administration statistics show that, in a car accident, harm degree rollover after touchHit the house second. However, China's current high speed sharp turning vehicle dynamic rollover stability and rollover warningThe study is also very little. Therefore, this paper summarizes the current mainstream rollover stability model, hardware system and rollover warning algorithm. Through the simulation to calculate the roll angle measurement, more automobile side tumbling stability. And nowadays the most novel through the DPS to get the car's side angle, lateral acceleration and other data to alert. In this paper, based on the comparison of the advantages and disadvantages of the various schemes on the current car rollover stability analysis and early warning research made a certain degree of review.Keywords:rollover model, rollover warning algorithm, controller, rollover simulation, GPS rollover control system1.汽车侧翻模型及动态稳定性分析1.1简明汽车模型建立模型为研究汽车侧翻提供了很大的便利。
基于动态稳定性的汽车侧翻预警刘丁确(河北省机械科学研究设计院,河北 石家庄 050051)摘 要:文章根据车轮侧倾外倾、变形转向影响轮胎侧偏特性等情况,建立了线性3自由度汽车侧翻动力学模型,并针对驾驶员的侧翻反映模型提出基于动态稳定性汽车侧翻预警的算法,旨在为提高汽车侧翻预警精确度提供参考,从而保障汽车防侧翻的安全性能。
关键词:动态稳定性;汽车;侧翻预警中图分类号:U461 文献标志码:A 文章编号:1672-3872(2019)18-0149-01——————————————作者简介: 刘丁确(1987—),男,河北石家庄人,本科,工程师,研究方向:机械,汽车智能检测。
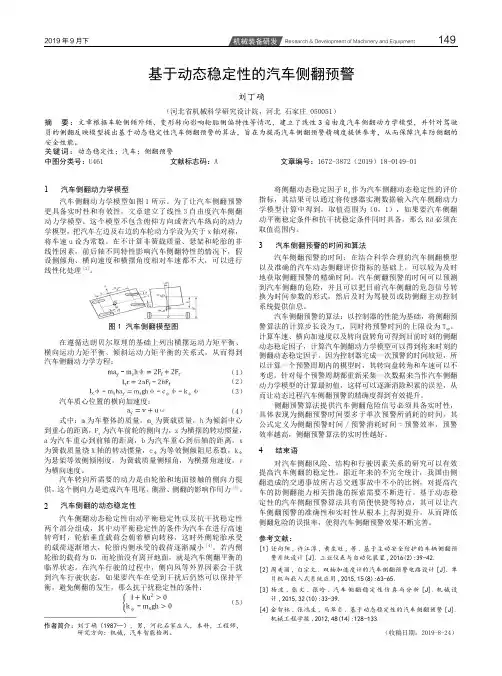
1 汽车侧翻动力学模型汽车侧翻动力学模型如图1所示。
为了让汽车侧翻预警更具备实时性和有效性,文章建立了线性3自由度汽车侧翻动力学模型。
这个模型不包含俯仰方向或者汽车纵向的动力学模型,把汽车左边及右边的车轮动力学设为关于x 轴对称,将车速u 设为常数。
在不计算非簧载质量、悬架和轮胎的非线性因素,前后轴不同特性影响汽车侧翻特性的情况下,假设侧倾角、横向速度和横摆角度相对车速都不大,可以进行线性化处理[2]。
将侧翻动态稳定因子R d 作为汽车侧翻动态稳定性的评价指标,其结果可以通过将传感器实测数据输入汽车侧翻动力学模型计算中得到,取值范围为(0,1),如果要汽车侧翻动平衡稳定条件和抗干扰稳定条件同时具备,那么Rd 必须在取值范围内。
3 汽车侧翻预警的时间和算法汽车侧翻预警的时间:在结合科学合理的汽车侧翻模型以及准确的汽车动态侧翻评价指标的基础上,可以较为及时地获取侧翻预警的精确时间。
汽车侧翻预警的时间可以预测到汽车侧翻的危险,并且可以把目前汽车侧翻的危急信号转换为时间参数的形式,然后及时为驾驶员或防侧翻主动控制系统提供信息。
汽车侧翻预警的算法:以控制器的性能为基础,将侧翻预警算法的计算步长设为T s ,同时将预警时间的上限设为T up 。
油气悬架工程车辆的侧翻稳定性研究油气悬架工程车辆的侧翻稳定性研究随着经济的不断发展和城市化进程的加快,各种工程车辆在工程建设和维护中的作用越来越大。
其中,油气悬架工程车辆是一类常用的工程车辆,具有重载能力和适应性强的特点,在农村公路、山区等地区得到广泛应用。
然而,由于油气悬架工程车辆的特殊结构和作业条件,其侧翻稳定性问题备受关注。
油气悬架工程车辆的侧翻稳定性与其结构和工作时的行驶状态密切相关。
该车辆采用了空气弹簧和气囊等悬架系统,可以根据车辆载荷实现高低调节和自适应悬架。
另外,该车辆通常采用重心低、底盘宽的结构,使得车辆行驶时具有较好的稳定性。
然而,在一些极端工作条件下,如山区陡坡、急弯道等,车辆容易出现侧翻。
因此,研究油气悬架工程车辆的侧翻稳定性,对于保障车辆安全、提高工作效率具有重要意义。
为了研究油气悬架工程车辆的侧翻稳定性,首先需要对车辆结构和工作状态进行分析。
对于该车辆的结构,需要重点关注车辆位置和重心高度的变化情况。
在悬架系统受到外部作用的情况下,车辆存在向某一侧翻倾倒的风险。
此时,重心高度的变化会直接影响车辆的侧翻稳定性。
其次,需要考虑车辆的行驶状态。
例如,在曲线行驶时,车辆容易出现横向偏移,增加了车辆侧翻的风险。
在分析了车辆的结构和工作状态后,还需要制定相应的侧翻防止措施。
针对车辆重心高度的变化,可以通过优化车辆结构和技术升级等方式进行改善。
此外,也可以采取加强车辆防护设施等被动措施来减少侧翻损失。
针对车辆的行驶状态,可以通过加强驾驶员培训和加装安全预警系统等主动措施来提高车辆的侧翻稳定性。
总之,油气悬架工程车辆的侧翻稳定性是一个重要的研究方向。
它涉及到车辆的结构设计、安全防护、行驶状态等多个方面。
只有在充分了解车辆的特点和作业条件的基础上,才能提出有效的侧翻防范措施,保障车辆的安全和工作效率。
涉及油气悬架工程车辆侧翻稳定性的相关数据一般分为车辆结构参数和实际工作数据两部分。
首先,车辆结构参数包括车辆重量、重心高度、轴距、宽度等参数。
10.16638/ki.1671-7988.2019.19.038大客车防侧翻预警及控制分析孙艳妮(西安汽车职业大学,陕西西安710600)摘要:大客车虽然给人们的出行带来了一定的方便,但是也面临着严峻安全问题。
大客车在运行的过程中,鉴于其载客量大、重心高等特点,在高速行驶进行转弯的过程中,极容易发生侧翻事故,给人们的生命财产带来了严重的威胁。
论文以大客车防侧翻为研究切入点,对其预警系统、控制系统进行了详细的研究和分析。
关键词:大客车;防侧翻;预警;控制系统中图分类号:U463.66 文献标识码:A 文章编号:1671-7988(2019)19-107-03Early Warning and Control Analysis of Passenger Bus Anti-rolloverSun Yanni(Xi'an Automobile V ocational University, Shaanxi Xi'an 710600)Abstract: Although bus has brought some convenience to people's travel, it is also facing severe safety problems. In the course of operation, in view of its large passenger capacity and high center of gravity, buses are very prone to roll over accidents during the process of turning at high speed, which poses a serious threat to people's lives and property. In this paper, the prevention of side-flip of buses as a research entry point, its early warning system, control system is studied and analyzed in detail.Keywords: bus; Prevention of roll over; Early warning; control systemCLC NO.: U463.66 Document Code: A Article ID: 1671-7988(2019)19-107-03前言伴随着国民经济的发展,我国的高速公路也逐渐完善。
汽车驾驶中的侧翻问题与预防在快节奏的现代社会中,汽车已成为我们生活中不可或缺的一部分。
然而,随着汽车数量的增加和道路拥堵情况的加剧,各种交通事故也时有发生。
其中,侧翻事故是一种常见且危险的事故类型,严重威胁着驾驶者和乘客的生命安全。
因此,对于汽车驾驶中的侧翻问题,有必要加以重视,并采取预防措施。
首先,要了解什么是汽车侧翻以及造成侧翻事故的主要原因。
汽车侧翻是指车辆在行驶中因转向急剧或遇到外力作用而猛烈颠覆或倾斜的现象。
造成汽车侧翻事故的主要原因有:驾驶员操作失误、超速行驶、弯道转向不当、车辆超载、悬挂系统故障等。
这些因素往往相互作用,导致汽车侧翻事故的发生。
接着,针对汽车侧翻问题,我们应该采取一些预防措施。
首先,驾驶员在驾驶过程中应保持高度警惕,遵守交通规则,不超速行驶,避免疲劳驾驶。
其次,驾驶员在转弯时要减速慢行,尤其是在高速公路上行驶时更应注意减速转弯,避免急转弯或超速过弯。
此外,车辆的保养和检修也是预防汽车侧翻事故的重要环节,定期检查轮胎气压、悬挂系统和刹车系统等,确保车辆运行的安全性。
除了驾驶员本身的注意事项外,车辆本身的设计也对预防侧翻事故起着重要作用。
如今,越来越多的汽车生产商在设计车辆时将车辆的稳定性和安全性放在首位。
采用先进的悬挂系统、电子稳定控制系统等技术,提高车辆在转弯时的稳定性。
同时,车辆的轴距、重心等设计也能影响车辆的侧翻稳定性。
因此,选择一款稳定性较好的车型也是预防侧翻事故的重要手段。
此外,除了驾驶员和车辆本身的因素外,道路状况也是影响汽车侧翻事故的重要因素。
在行驶中,我们应该尽量避开路面不平整、路面湿滑或坡度太陡的路段,减少因外力作用而导致侧翻事故的发生。
总的来说,汽车侧翻事故是一种常见但危险的交通事故类型,我们应该高度重视并采取有效的预防措施。
驾驶员要提高安全意识,遵守交通规则,减少驾驶过程中的操作失误;车辆制造商要注重车辆安全性设计,提高车辆的稳定性和安全性;道路管理者应保障道路的平整度和安全性,减少因道路状况导致的事故发生。

10.16638/ki.1671-7988.2018.13.011某客车急转弯侧翻稳定性分析赵治军,张天宇,黄喆,吴岩(长安大学汽车学院,陕西西安710064)摘要:随着道路交通的快速发展,公路旅客运输蓬勃发展总体客运量年年攀升。
然而,有关客车的重、特大事故屡见不鲜,给人民群众的生命和财产安全带来了相当大的损失。
其中,客车侧翻事故无论在数量上还是人员伤亡和经济损失的程度上都已成为仅次于碰撞的第二大道路交通事故形态。
文章以一款8m客车为基础,通过Trucksim 软件建立了客车动力学模型,进行了急转弯稳定性虚拟试验。
通过鱼钩试验(Fish-hook)分析了方向盘转角与客车侧向加速度、轮胎垂直反力的关系,探讨了侧翻倾向性。
通过单因素的仿真试验,揭示了方向盘最大转角、方向盘角速度对8m客车侧翻倾向性的影响,表明方向盘转角对侧翻倾向性影响最为明显,方向盘角速度也有较大的影响。
该研究结果对于8m客车设计改进、风险预测和减少交通事故的发生具有科学意义。
关键词:客车侧翻;鱼钩试验;侧翻倾向性;Trucksim中图分类号:U467 文献标识码:B 文章编号:1671-7988(2018)13-36-03Analysis of Rollover Stability of a Passenger CarZhao Zhijun, Zhang Tianyu, Huang Zhe, Wu Yan( Automotive College of Chang'an University, Shaanxi Xi'an 710064 )Abstract: With the rapid development of road traffic, Highway passenger transport is booming and overall passenger volume rises year after year. However, there have been lots of bus accidents and those accidents lead to the considerable losses of people's lives and property. Among them, the bus rollover accident in terms of the number or casualties have become second only to the collision of the bus. A dynamics model was developed to analyze 8m-bus dynamics and sharp turn stability. The relationships between the steering wheel angle, lateral acceleration, and tire vertical force were obtained using the fish-hook virtual tests. The influences of bus structure, traffic conditions, and external conditions on the rollover tendency were also analyzed in single-factor experiments. The results show that the the max angle is one of the most important parameters with the vehicle 's center of gravity and other parameters also having some influence on the rollover tendency. These results can be used to improve 8m-bus redesigns, improve risk prediction, and reduce the incidence of traffic accidents.Keywords: Rollover; Fish-hook; Rollover tendency; TrucksimCLC NO.: U467 Document Code: B Article ID: 1671-7988(2018)13-36-03前言客车的翻车事故虽然发生率虽不如正撞、尾撞高,但容易造成群死群伤,产生了严重的社会危害。
《重型汽车》HEAVY TRUCK 2010.4.20□文/贾会星 张信群 江雪峰(滁州职业技术学院)重型汽车一般为非公路车辆,其质心高度较高,行驶的道路条件较为恶劣且装载质量大,车辆的行驶安全十分重要。
重型汽车的侧翻试验是难以实施的,本文通过建立重型汽车侧翻的数学模型,进行计算机仿真,来分析重型汽车转向行驶稳定性的影响因素,从而为提高重型汽车的工作稳定性,在设计阶段保证重型汽车结构参数科学合理,避免汽车行驶发生翻车事故奠定理论基础。
1 重型汽车转向的侧翻模型重型汽车前后桥一般均采用非独立悬架,在行驶过程中,遇到弯道或者为避开障碍,常实行紧急转向。
转向时车辆的质心绕转向瞬心C 作圆周运动,如图1所示。
由于转向时离心力的作用,重型汽车的质心发生了偏移。
转向瞬心C 到后内侧车轮的距离Rr 可看作是重型汽车后桥的转向半径;转向瞬心C 到前内侧车轮的距离Rf 可看作是重型汽车前桥的转向半径;θ为重型汽车转向轮转过的角度;L 为重型汽车的轴距;重型汽车质心到前桥距离为a ;到后桥距离为b 。
由图1的几何关系,可知:R r = L / t a n θR f= L / si n θ图1 重型汽车转向示意图1.1 重型汽车转向侧倾受力分析重型汽车转向时,由于转向离心力的作用,会使重型汽车车身向转向外侧倾斜,如图2所示。
图中,Gs 为重型汽车车身的悬挂质量所受的重力;G u1为重型汽车前桥的非悬挂质量所受的重力;G u2为重型汽车后桥的非悬挂质量所受的重力;F yi1,F yi2分别为地面给转向内侧车轮的侧向附着力;F yo1,F yo2分别为地面给转向外侧车轮的侧向附着力;F zi 1,F zi 2分别为地面给转向内侧车轮的支撑反力;F zo 1,F zo2分别为地面给转向外侧车轮的支撑反力;F sy 为重型汽重型汽车转向侧翻稳定性浅析(1){Qichejishu车车身的悬挂质量转向时产生的离心力;Fuy1,Fuy2为前后车桥非悬挂质量产生的离心力。
车辆侧翻调查报告范文一、事件背景。
话说在[具体日期],那是一个看似平常的日子,一辆[车辆品牌及型号]车却遭遇了一场惊心动魄的意外——侧翻了!这一翻可不得了,就像一个好好站着的巨人突然摔了个大马趴,引起了周围群众的一阵惊呼,也让车主惊出了一身冷汗。
二、调查目的。
咱们得搞清楚这好端端的车为啥突然就翻了呀,是车的问题呢,还是有啥其他不可描述的原因,这样才能给车主一个交代,也能避免类似的事情再次发生,让其他开这款车的小伙伴们能安心在路上飞驰。
三、调查过程。
# (一)现场勘查。
1. 道路情况。
赶到现场一看,那道路虽然不是一马平川的高速公路,但也算是比较平整的普通公路啊。
没有那种大坑小洼,也没有什么障碍物突然出现在路上,基本可以排除道路因素导致侧翻。
不过呢,现场倒是有一些车辆侧翻时留下的痕迹,就像一个调皮的孩子在地上乱涂乱画一样,车轮的印记歪歪扭扭的,指向侧翻的方向。
2. 车辆外观。
再看看那辆车,哎哟喂,侧躺在那里看起来可真可怜。
车身侧面有不少擦痕,就像被谁狠狠地挠了一把。
车门也有点变形了,像是被一个大力士捏了一下。
轮胎倒是还在,没有爆胎的迹象,不过车周围有一些小石子,也不知道是不是翻车的时候带起来的。
# (二)车主访谈。
找到了车主,车主那可是一脸的惊魂未定。
据车主描述,当时他正开着车哼着小曲儿呢,速度也不算快,突然感觉车好像被什么东西拉了一下,然后就开始失控,还没等他反应过来,车就侧翻了。
车主特别强调,自己开车的时候可没有做什么危险动作,也没有玩手机或者打瞌睡之类的。
# (三)车辆检查。
1. 机械部分。
2. 悬挂系统。
在检查悬挂系统的时候,发现了一点小端倪。
左前悬挂的一个小部件有点松动,虽然不是什么特别大的问题,但这个小部件松动可能会影响到车辆的稳定性。
师傅说,就像一个人的鞋子有点松,走路的时候就容易崴脚一样,车的悬挂部件松动也可能会让车在行驶过程中出现意外。
# (四)行车记录仪分析。
还好车上有行车记录仪,就像一个默默记录一切的小侦探。
汽车侧翻分析在汽车行驶中中,侧翻是其中一种最为严重并且威胁成员安全的事故。
侧翻可以定义为能够使车辆绕其纵轴旋转90度或更多以至于车身同地面接触的任何一种操纵。
侧翻可以由一个或一系列综合因素产生。
它可以发生在平直的水平地面上,并且车辆的侧向加速度达到一定的数值,该数值要超过车辆侧面重量转移到车轮上所抵消的加速度值。
通过有坡度的路面(或无路情况)时由于不平路面的冲击,地面松软或其他障碍物会促使侧向压力提高从而使车辆“失足”。
侧翻过程是一个包括作用在车辆上和车辆里的力的相互作用的复杂过程。
侧翻受操纵和高速公路的影响。
人们已经通过理论分析以及包括一系列复杂设备的模型实验研究侧翻过程。
这个过程很容易通过静态基本结构实验来理解(忽略惯性和滚动平面上的加速度),并且促进发展更加复杂的模型。
1、 刚性汽车的准静态侧翻汽车侧翻的最基本的机械特性可以通过考查转弯过程中稳定车身的受力均衡性来了解。
稳定的车辆是指悬架和轮胎的偏置在分析中被忽略掉。
在转弯操纵中,侧向力作用在地面上来平衡作用在汽车重心上的侧向加速度,如图9-2所示。
侧向力作用在车辆上的位置的不同产生一个力矩,该力矩使车辆向如图所示的外侧侧翻. 为了分析转动情况,假定汽车在稳定状态以使汽车没有滚动加速度,并且使轮胎如图所示受力(前轮和后轮)。
在很多公路环境中,它也适合考虑横向坡度。
如大家所知的坡度和道路转弯处汽车外侧比内侧高出的程度。
在分析中,将角度表示为”ϕ”,想左下的坡度表示正角。
这个方向的坡度有助于平衡侧向加速度。
斜坡角度通常情况下很小,而且角度很小时约有()1cos ,sin ==ϕϕϕ。
以汽车接地点为中心的力矩关系为: 02=-+-t zi y Mg t F Mh h Ma ϕ (9-1)从式(9-1)我们可以得出a y :htMgF h t ga zi y -+=ϕ2 (9-2)在水平路面上(0=ϕ),没有侧向加速度,方程也成立。
此时,内侧车轮载重,F zi ,是车总重的一半。
防侧翻稳定性控制认识才汽车侧翻造成的车内人员伤亡率很高。
因此,汽车侧翻保护系统的存在很必要,对于SUV和敞篷车来说尤为重要。
目前,标致207CC,沃尔沃XC60,XC90,V8 Vantage Roadster 等都配备了汽车翻滚保护系统。
该系统采用一个回转探测器来测定车辆的侧倾速度和
角度,利用测得数据,计算出极限角度和翻滚的危险程度。
如果计算值很大,说明存在明显的倾翻危险。
此时,防打滑系统内的DSTC就被激活并做出反应,降低发动机的功率,同时对一个或几个车轮施加制动力,促使车辆转向不足,恢复稳定。
RSC系统是目前市场上惟一用来测定车辆侧倾角度的主动安全系统。
防侧翻稳定性控制(RSC)防侧翻稳定性控制(RollStabilityControl,简称RSC),相对于ESC/ESP而言,它主要应用于高附着系数路面,相对成本较低,而且也较容易实现。
在RSC系统的电控单元中集成了一个横向加速度传感器,这个传感器实时测量车辆相应的横向加速度,并计算临界加速度限制,当横向加速度接近这一临界点时,系统就会激活原有的ASR电磁阀和驱动桥的ABS电磁阀,从而对驱动桥进行制动,以使车辆减速,同时对于带挂车的牵引车,系统将激活额外的一个电磁阀,对挂车控制阀输出制动信
号,从而对挂车进行制动。
在RSC工作的过程中,系统对相应的车轮进行制动,进而控制车辆的行驶稳定性,同时,RSC系统还会通过SAEJ1939CAN总线控制发动机和缓速器的输出扭矩,从而有效的避免翻车事故的发。
汽车侧翻稳定性与预警综述摘要:近年来,汽车侧翻事故作为重要的安全问题,受到越来越多的关注。
美国高速公路交通安全管理局统计数据表明,在汽车事故中,侧翻的危害程度仅次于碰撞事故居第二位。
然而,我国目前针对高速急转弯时汽车侧翻动态稳定性及预警方面的研究还很少。
因此,本文总结归纳了目前主流侧翻稳定性模型,侧翻预警的硬件系统与算法。
通过仿真来计算侧倾角,来得测算汽车侧翻稳定性。
以及时下最为新颖的通过DPS来获得汽车的侧倾角,横向加速度等数据来预警。
本文比较了各种方案的利弊,对目前汽车的侧翻稳定性分析及预警研究做了一定程度的综述。
关键字:侧翻模型,侧翻控制器,预警算法,侧翻仿真,GPS侧翻控制系统Abstract: in recent years, the most important safety problems as vehicle rollover accident, has attracted more and more attention. High U.S.Highway traffic safety administration statistics show that, in a car accident, harm degree rollover after touchHit the house second. However, China's current high speed sharp turning vehicle dynamic rollover stability and rollover warningThe study is also very little. Therefore, this paper summarizes the current mainstream rollover stability model, hardware system and rollover warning algorithm. Through the simulation to calculate the roll angle measurement, more automobile side tumbling stability. And nowadays the most novel through the DPS to get the car's side angle, lateral acceleration and other data to alert. In this paper, based on the comparison of the advantages and disadvantages of the various schemes on the current car rollover stability analysis and early warning research made a certain degree of review.Keywords:rollover model, rollover warning algorithm, controller, rollover simulation, GPS rollover control system1.汽车侧翻模型及动态稳定性分析1.1简明汽车模型建立模型为研究汽车侧翻提供了很大的便利。
合适的模型可以直观反应汽车的运动状态。
成光华在分析国内外有关汽车侧翻预警的研究基础上,建立了由“自行车模型”或侧倾平面模型组成的线性三自由度汽车侧翻模型。
该模型不仅包含了汽车静态因数,也包含轮胎、悬架等造成的动态因数,是汽车侧翻预警算法和硬件在环仿真的基础。
汽车侧翻预警算法中选用汽车的横向载荷转移率作为汽车是否发生侧翻的判断标准,根据汽车左右车轮的载荷LTR(Lateral-load Transfer Rate)的变化,计算汽车模型当前状态距离侧翻的时间值TTR (Time-To-Rollover),对汽车侧翻状态及时地预警。
而对于客车这类形状较为单一的运载工具。
覃祯员建立了立柱模型,揭示了侧面结构。
依据侧翻试验要求,客车应从水平位置缓慢翻转到不稳定角,在这个翻转过程中车辆不应出现摆动和受翻转速度的影响。
在侧翻仿真模拟过程中,可以模拟车辆及翻转平台从水平位置翻转到不稳定角后车辆靠自身重力自由翻转撞击到刚性地面,但为了节省仿真计算时间,笔者将客车翻转过程中与地面接触时刻作为初始仿真时刻,并赋予车辆绕着旋转平台转轴作旋转,其初始翻转角速度ω计算方式如下:式中: m 为车辆整备质量,mm; IXX为转动惯量,kgmm2; ΔH 为车辆从不稳定角翻转到接触地面过程中其质心高度的变化量,mm; r 为车辆在不稳定角位置其质心到翻转平台旋转轴的旋转半径,mm。
通过刚性单元模拟生存空间,生存空间与车身地板骨架刚性连接,生存空间与车辆结构件、地面之间无需定义接触,目的是为了观察侧翻过程中侧面结构请入情况。
笔者建立了某12 m 客车侧翻有限元仿真模型,如图4 所示。
1.2三自由度汽车模型金智林等人以运动型多功能汽车为研究对象,在车辆坐标系下建立了其线性三自由度侧翻模型。
该模型包括横向、横摆以及侧倾方向的响应及其耦合影响,能反映影响运动型多功能汽车高速急转弯时侧翻的主要因素。
此外,考虑汽车侧翻过程中引起的轮胎及悬架变形因素对车轮侧偏角的影响,建立了线性的轮胎动力学模型。
1.3.1 汽车侧翻动力学模型汽车侧翻动力学模型是研究汽车侧翻问题的基础,其形式和复杂程度因不同的研究目的而异。
为了研究汽车侧翻动力学基础的一般规律,可以抓住汽车侧翻的主要特征,而对其它影响因素进行简化,建立简单的侧翻动力学模型。
三自由度汽车侧倾模型[59-97],是研究汽车侧倾运动的最为基础的模型。
如图1.5 所示,该模型由“自行车”模型和侧倾平面模型组成,包括汽车横向运动、横摆运动以及侧倾运动。
运用理论力学可以得到这三个自由度方向反映汽车侧翻运动特性的数学模型,根据数学模型可以分析汽车侧翻指标以及汽车结构参数和随机因素对侧倾运动的影响。
祝军等人分析汽车在侧翻和滚翻过程中的受力状态和轮胎或车身与路面的相互作用方式,建立汽车侧翻和滚翻的运动学和动力学模型,揭示汽车临界侧翻碰撞力与持续作用时间等参数的关系,推导侧翻车辆侧向速度的范围,确定滚筒模型中关键参数的选取方法。
杨利勇利用具有可变形悬架和轮胎的汽车侧翻模型,分析了悬架及轮胎等因素对汽车侧翻的影响,推导出包括轮距变化、举升效应、轮胎转动惯性力矩等因素在内的汽车侧翻阈值公式,突出影响汽车侧翻的悬架因素,为评估悬架对汽车侧翻稳定性影响提供了理论依据。
果忽略了悬架和轮胎侧偏的影响,汽车就视为刚性汽车。
刚性汽车做稳态转向时,受力如图1所示。
对弯道外侧轮胎的接地点取矩,则有:∑T= mgB/2- mayhg- FziB= 0式中,m为汽车质量,g为重力加速度,B为汽车轮距,ay为侧向加速度,hg为质心高度,Fzi为转弯内侧的垂直载荷。
当汽车转向时的侧向加速度达到侧翻阈值时,转弯内侧的轮胎载荷Fzi 为零。
因此侧翻阈值为:ayg=B/2hg忽略了悬架的影响和轮胎的侧偏,会使计算值比实际值大很多。
因此,上式的计算结果通常用来比较汽车的侧翻稳定性。
1.2具有可变形悬架的汽车侧翻模型具有可变形悬架的汽车侧翻模型的建立稳态转向中,车身会绕侧倾轴线转过角,即: =T K =mayhK (3)式中,T 为作用在车身上的侧倾力矩;m为汽车的质量;h为质心到侧倾中心的距离;K 为汽车悬架组合侧倾角刚度。
其中,mhK 表示汽车的侧倾率,即单位加速度的侧倾角。
它表明,包括轮胎刚度在内的组合侧倾角刚度,会直接影响汽车的侧倾率。
在轮胎发生变形(垂直方向)时,侧倾角会增大,如图2所示。
图中,hr为侧倾中心高度,点C为汽车的侧倾中心。
同时,车身的侧倾导致了汽车质心的侧向偏移,将使汽车轮距发生一定的变化。
车身的侧倾使重心有了沿加速度方向的分力,这个分力反过来又加剧了车身的侧倾。
余强等人针对被动悬架系统侧翻稳定性比较差的问题,提出采用主动悬架系统的方法进行改善。
通过汽车侧倾运动状态分析,建立了被动悬架系统、主动悬架系统和控制系统模型。
模拟分析得到主动悬架系统使得汽车在弯道行驶时的侧倾角有效值下降了92.8%,侧倾角加速度有效值下降了78.2%,侧翻因子有效值下降了92.6%。
结果表明:利用主动悬架系统可以有效地降低汽车非直线行驶时的侧倾角以及侧倾角加速度,提高汽车的侧翻稳定性,是提高汽车非直线行驶状态下安全性的一个合理的解决方案。
2.侧翻控制器2.1 防侧翻控制器设计汤敏等人通过对侧向加速度信号反馈控制的方式,计算确定汽车所需的补偿横摆力矩ΔM ,控制器算法采用经典的PID 控制,输入为反馈信号的参考值和实际值的差值e,侧向加速度的参考值设置为0,即控制器的目标是减小扰动输入的作用,控制器的输出为补偿横摆力矩ΔM ,该防侧翻控制流程图结构如图3.4所示。
图3.4 防侧翻控制流程图控制器的触发条件如3.1部分所讲的,当0.8thLTR ≥LTR = 时进行侧翻预警和触发控制器;施加制动的方式为外前轮制动的差动制动方式。
翁建生等人为了减少汽车侧翻事故,提出了一种基于模型的汽车侧翻预警算法以及在预警基础上的防侧翻控制算法岑达希提出了主动转向技术可以主动改变转向角的大小来调整汽车的运动姿态。
本文通过深入分析转向角大小对汽车侧翻的影响,采用主动转向来进行防侧翻控制,并进行了数值仿真分析,分析结果说明主动转向能够通过改变汽车的横摆角速度和侧向加速度来降低汽车的横向载荷转移率,从而提高了汽车的防侧翻能力。
同时该分析结果为主动转向防侧翻控制设计提供依据。
差动制动能够通过改变汽车的动力学特性来改变汽车的行驶姿态。
本文通过分析单轮差动制动对汽车动力学特性的影响以及差动制动防侧翻控制的基本原理,建立了基于横向载荷转移率的汽车差动制动防侧翻动力学模型,并在此基础上进行数值仿真研究。
通过比较了差动制动与普通制动的防侧翻效果来说明差动制动的优越性,然后研究分析了差动制动时制动力大小对汽车运动姿态的影响,为防侧翻控制设计提供依据。
械式主动转向系统的主要工作原理为汽车行驶的运动状态参数由传感器测得,主要参数包括车速,横摆角速度。
,方向盘转角占、等,按照预先编制好的控制逻辑,设定附加转角占。
的目标值,并通过执行机构将氏叠加到方向盘转角上,实现总的前轮转角今。
这样,可以使得转向盘转角和前轮转角的传动比根据汽车的实际行驶状态而发生连续的变化,从而提高汽车的操纵稳定性。
那么主动前轮转角应为双行星齿轮机构产生的前轮转角与伺服电机通过转向机构产生的前轮转角之和,表达式为刘汪洋等人根据PID控制主动转向技术能够主动改变驾驶员给定的转向轮转角,使得汽车的响应尽可能地与理想响应特性一致,从而提高汽车的操级稳定性。