第二章--控制系统状态空间表达式的解
- 格式:pptx
- 大小:1.60 MB
- 文档页数:87
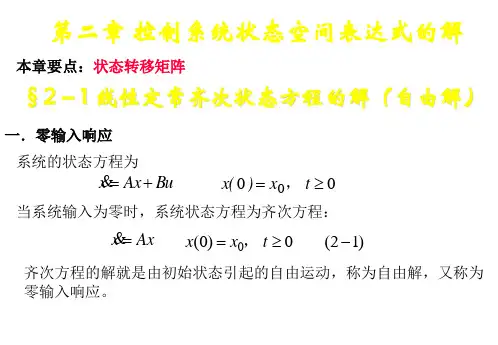
第二章 控制系统的状态空间表达式2-1 状态、状态变量、状态空间、状态方程、动态方程任何一个系统在特定时刻都有一个特定的状态,每个状态都可以用最小的一组(一个或多个)独立的状态变量来描述。
设系统有n 个状态变量n x x x ,,21,它们都是时间t 的函数,控制系统的每一个状态都可以在一个由n x x x ,,21为轴的n 维状态空间上的一点来表示,用向量形式表示就是:()()()()[]T=t x t x t x t x n 21()t x 称作系统的状态向(矢)量。
设系统的控制输入为:r u u u ,,,21 ,它们也是时间t 的函数。
记:()()()()[]T=t u t u t u t u r 21那么表示系统状态变量x(t)随系统输入u(t)以及时间t 变化的规律的方程就是控制系统的状态方程:()()()[]t t u t x f t x,,= 其中()()()[]T=t f t f t f f n 21 是一个函数矢量。
设系统的输出变量为m y y y ,,,21 ,则()Tm y y y y ,,,21 =称为系统的输出向量。
表示输出变量y(t)与系统状态变量x(t)、系统输入u(t)以及时间t 的关系的方程就称作系统的输出方程:()()()[]t t u t x g t y ,,=其中()Tm g g g g ,,,21 = 是一个函数矢量。
在现代控制理论中,用系统的状态方程和输出方程来描述系统的动态行为,状态方程和输出方程合起来称作系统的状态空间表达式或称动态方程。
根据函数向量F 和G 的不同情况,一般控制系统可以分为如下四种:∙ 线性定常(时不变)系统(LTI-Linear Time-Invariant); ∙ 线性不定常(时变)系统(Linear Time-Variant); ∙ 非线性定常系统(Nonlinear Time-Invariant); ∙非线性时变系统(Nonlinear Time-Variant)。
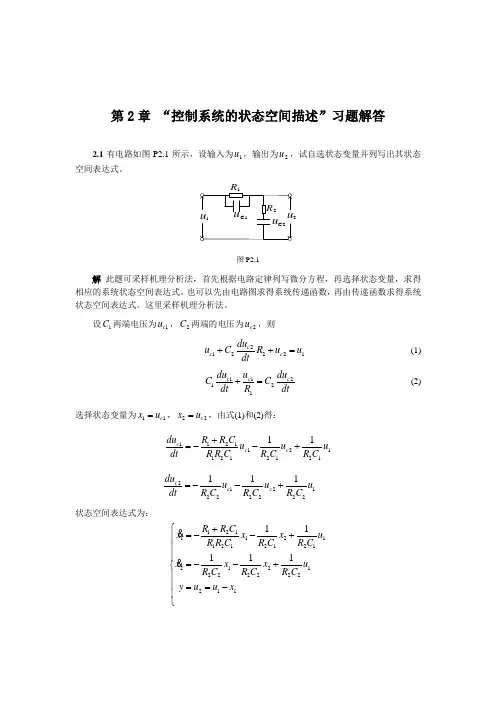
第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦[]11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
1图P2.2解 这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。
令()f t 为输入量,即u f =,1M ,2M 的位移量1y ,2y 为输出量, 选择状态变量1x =1y ,2x = 2y ,3x =1dy dt,24dyx dt =。
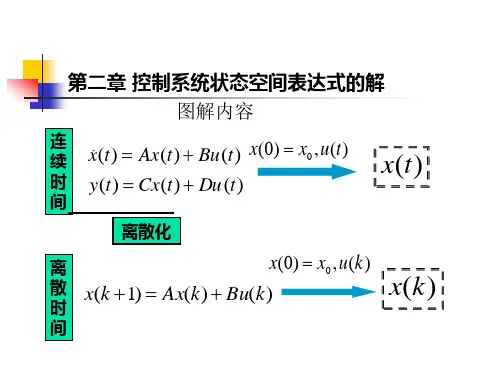
第二章 状态空间表达式的解3-2-1 试求下列矩阵A 对应的状态转移矩阵φ(t )。
(1) ⎥⎦⎤⎢⎣⎡-=2010A (2) ⎥⎦⎤⎢⎣⎡-=0410A (3) ⎥⎦⎤⎢⎣⎡--=2110A (4) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=452100010A (5)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0000100001000010A (6)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=λλλλ000100010000A 【解】:(1) (2) (3) (4)特征值为:2,1321===λλλ。
由习题3-1-7(3)得将A 阵化成约当标准型的变换阵P 为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=421211101P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-1211321201P线性变换后的系统矩阵为:(5)为结构四重根的约旦标准型。
(6)虽然特征值相同,但对应着两个约当块。
或}0100010000{])[()(1111----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=-=Φλλλλs s s s L A sI L t 3-2-2 已知系统的状态方程和初始条件 (1)用laplace 法求状态转移矩阵; (2)用化标准型法求状态转移矩阵; (3)用化有限项法求状态转移矩阵; (4)求齐次状态方程的解。
【解】:(1) (2)特征方程为: 特征值为:2,1321===λλλ。
由于112==n n ,所以1λ对应的广义特征向量的阶数为1。
求满足0)(11=-P A I λ的解1P ,得:0110000000312111=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0011P 再根据0)(22=-P A I λ,且保证1P 、2P 线性无关,解得:对于当23=λ的特征向量,由0)(33=-P A I λ容易求得: 所以变换阵为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==110010001321P P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-1100100011P 线性变换后的系统矩阵为:(3)特征值为:2,1321===λλλ。
2-3 由控制系统的方块图求系统状态空间表达式系统方块图是经典控制中常用的一种用来表示控制系统中各环节、各信号相互关系的图形化的模型,具有形象、直观的优点,常为人们采用。
要将系统方块图模型转化为状态空间表达式,一般可以由下列三个步骤组成:第一步:在系统方块图的基础上,将各环节通过等效变换分解,使得整个系统只有标准积分器(1/s )、比例器(k )及其综合器(加法器)组成,这三种基本器件通过串联、并联和反馈三种形式组成整个控制系统。
第二步:将上述调整过的方块图中的每个标准积分器(1/s )的输出作为一个独立的状态变量i x ,积分器的输入端就是状态变量的一阶导数dtdx i。
第三步:根据调整过的方块图中各信号的关系,可以写出每个状态变量的一阶微分方程,从而写出系统的状态方程。
根据需要指定输出变量,即可以从方块图写出系统的输出方程。
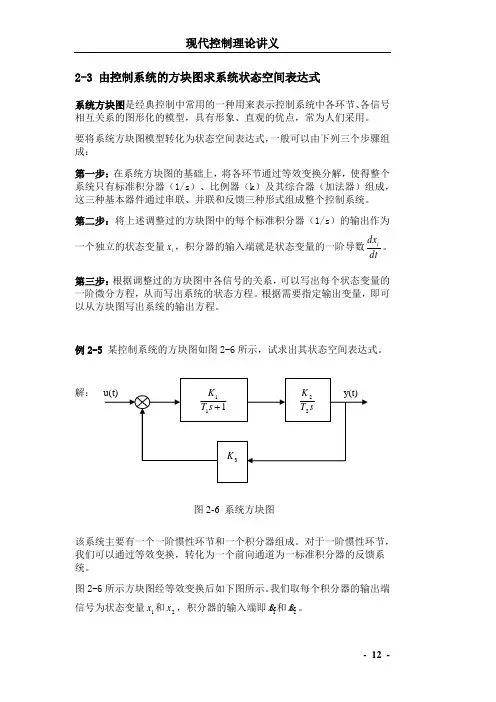
例2-5 某控制系统的方块图如图2-6所示,试求出其状态空间表达式。
解:该系统主要有一个一阶惯性环节和一个积分器组成。
对于一阶惯性环节,我们可以通过等效变换,转化为一个前向通道为一标准积分器的反馈系统。
图2-6所示方块图经等效变换后如下图所示。
我们取每个积分器的输出端信号为状态变量1x 和2x ,积分器的输入端即1x和2x 。
图2-6 系统方块图从图可得系统状态方程: ()⎪⎪⎩⎪⎪⎨⎧+--=-+-==uT K x T x T K K x K u T K x T x x T K x 112111311311212222111 取y 为系统输出,输出方程为:1x y =写成矢量形式,我们得到系统的状态空间表达式:[]⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎦⎤⎢⎢⎣⎡=x y u T K x K K T K x 010********例2-6 求如图2-7(a )所示系统的动态方程。
解:图2-7(a)中第一个环节21++s s 可以分解为⎪⎭⎫ ⎝⎛+-211s ,即分解为两个通道。

第二章控制系统的状态空间表达式一、主要内容1.状态空间描述的几个重要概念2.状态空间表达式的一般形式1)非线性系统的状态空间描述2)线性时变系统的状态空间描述3)线性定常系统的状态空间描述4)离散系统的状态空间描述3.系统状态空间表达式的特点4.状态空间表达式的建立1)由物理系统的机理直接建立状态空间表达式2)由系统高阶微分方程化为状态空间描述3)由系统传递函数化为状态空间描述4)由系统状态变量图列写状态空间描述5)由系统方块图列写状态空间描述5.状态向量的线性变换1)系统状态空间表达式的非唯一性2)系统特征值的不变性3)将状态方程化为型规范型(对角线型和约当型)二、教学基本要求1、正确理解状态变量和状态空间描述的概念、涵义和特点。
2、熟练掌握建立状态空间表达式的不同方法,能够依据不同的已知条件建立系统相应的状态空间表达式。
3、熟练掌握线性变换方面的知识。
理解坐标变换的概念,了解系统特征方程和特征值不变性及传递函数不变性的特点,熟练掌握将系统状态空间描述化为规范型的方法。
三、重点内容概要1. 状态空间描述的几个重要概念状态变量 是指能完整地、确定地描述系统的时域行为的最小一组变量。
给定了这个变量组在初始时刻0t t =的值和时刻0t t ≥系统的输入函数,那么系统在时刻0t t ≥的行为就可以完全确定。
这样一组变量就称为状态变量。
状态矢量 以状态变量为元组成的向量,称为状态矢量。
状态空间 以状态变量)(,),(),(21t x t x t x n 为坐标轴构成的n 维空间称为状态空间,记作n R 。
状态方程 状态变量和输入变量之间的关系用一组一阶微分方程来描述。
输出方程 系统的输出变量与状态变量、输入变量之间的数学表达式。
状态空间表达式 状态方程和输出方程综合起来,在状态空间中建立的对一个系统动态行为的完整描述(数学模型),称为系统的状态空间表达式。
2. 状态空间表达式的一般形式 (1) 非线性系统的状态空描述⎩⎨⎧==),,()),(),(()(t u g y t t u t f t X X X(2.1) 其中,n R X ∈为状态向量;p R u ∈为输入向量;q R y ∈为输出向量。