激光雷达-天河电子.ppt
- 格式:pptx
- 大小:18.27 MB
- 文档页数:20
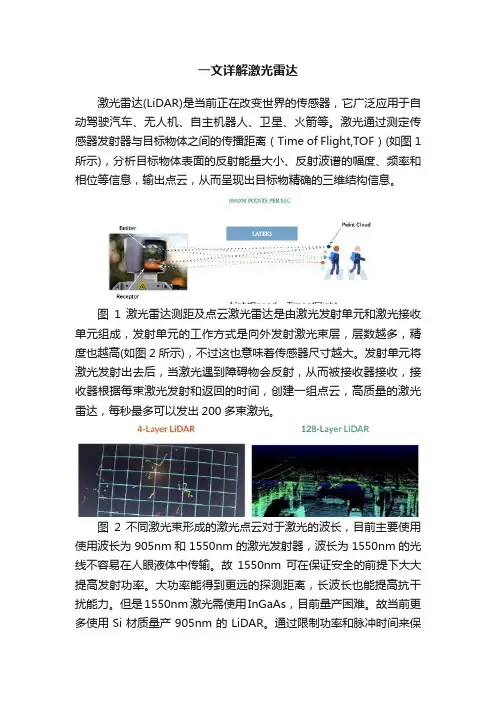
一文详解激光雷达激光雷达(LiDAR)是当前正在改变世界的传感器,它广泛应用于自动驾驶汽车、无人机、自主机器人、卫星、火箭等。
激光通过测定传感器发射器与目标物体之间的传播距离(Time of Flight,TOF)(如图1所示),分析目标物体表面的反射能量大小、反射波谱的幅度、频率和相位等信息,输出点云,从而呈现出目标物精确的三维结构信息。
图1 激光雷达测距及点云激光雷达是由激光发射单元和激光接收单元组成,发射单元的工作方式是向外发射激光束层,层数越多,精度也越高(如图2所示),不过这也意味着传感器尺寸越大。
发射单元将激光发射出去后,当激光遇到障碍物会反射,从而被接收器接收,接收器根据每束激光发射和返回的时间,创建一组点云,高质量的激光雷达,每秒最多可以发出200多束激光。
图2 不同激光束形成的激光点云对于激光的波长,目前主要使用使用波长为905nm和1550nm的激光发射器,波长为1550nm的光线不容易在人眼液体中传输。
故1550nm可在保证安全的前提下大大提高发射功率。
大功率能得到更远的探测距离,长波长也能提高抗干扰能力。
但是1550nm激光需使用InGaAs,目前量产困难。
故当前更多使用Si材质量产905nm的LiDAR。
通过限制功率和脉冲时间来保证安全性。
本文福利:分享报告《激光雷达行业报告2021》,公众号对话框回复【汽车ECU开发024】下载。
01.激光雷达的结构激光雷达的关键部件按照信号处理的信号链包括控制硬件DSP(数字信号处理器)、激光驱动、激光发射发光二极管、发射光学镜头、接收光学镜头、APD(雪崩光学二极管)、TIA(可变跨导放大器)和探测器,如图3所示。
其中除了发射和接收光学镜头外,都是电子部件。
随着半导体技术的快速演进,性能逐步提升的同时成本迅速降低。
但是光学组件和旋转机械则占具了激光雷达的大部分成本。
图3 激光雷达的关键部件02.激光雷达的种类目前市面上有不同种类的激光雷达,按驱动方式可分为机械式、MEMS、相控阵、泛光面阵式(FLASH)。