激光雷达-sick 激光雷达
- 格式:ppt
- 大小:4.13 MB
- 文档页数:26

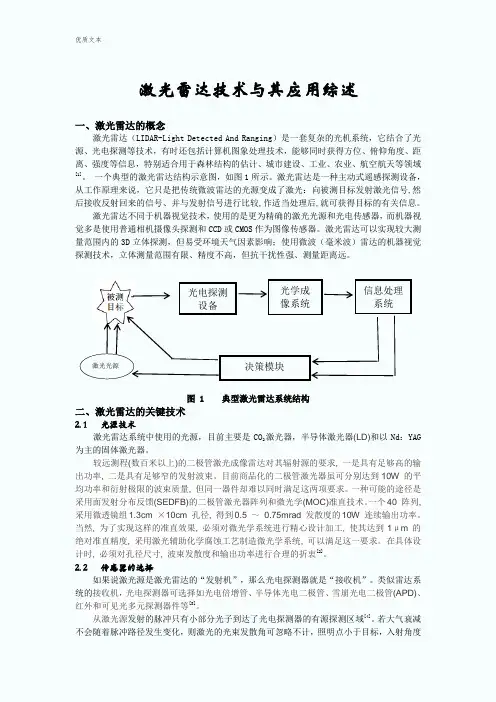
激光雷达技术与其应用综述一、激光雷达的概念激光雷达(LIDAR-Light Detected And Ranging )是一套复杂的光机系统,它结合了光源、光电探测等技术,有时还包括计算机图象处理技术,能够同时获得方位、俯仰角度、距离、强度等信息,特别适合用于森林结构的估计、城市建设、工业、农业、航空航天等领域[1]。
一个典型的激光雷达结构示意图,如图1所示。
激光雷达是一种主动式遥感探测设备,从工作原理来说,它只是把传统微波雷达的光源变成了激光:向被测目标发射激光信号,然后接收反射回来的信号、并与发射信号进行比较,作适当处理后,就可获得目标的有关信息。
激光雷达不同于机器视觉技术,使用的是更为精确的激光光源和光电传感器,而机器视觉多是使用普通相机摄像头探测和CCD 或CMOS 作为图像传感器。
激光雷达可以实现较大测量范围内的3D 立体探测,但易受环境天气因素影响;使用微波(毫米波)雷达的机器视觉探测技术,立体测量范围有限、精度不高,但抗干扰性强、测量距离远。
图 1 典型激光雷达系统结构二、激光雷达的关键技术2. 1 光源技术激光雷达系统中使用的光源,目前主要是CO 2激光器,半导体激光器(LD)和以Nd :YAG 为主的固体激光器。
较远测程(数百米以上)的二极管激光成像雷达对其辐射源的要求, 一是具有足够高的输出功率, 二是具有足够窄的发射波束。
目前商品化的二极管激光器虽可分别达到10W 的平均功率和衍射极限的波束质量, 但同一器件却难以同时满足这两项要求。
一种可能的途径是采用面发射分布反馈(SEDFB)的二极管激光器阵列和微光学(MOC)准直技术。
一个40 阵列, 采用微透镜组1.3cm ×10cm 孔径, 得到0.5 ~ 0.75mrad 发散度的10W 连续输出功率。
当然, 为了实现这样的准直效果, 必须对微光学系统进行精心设计加工, 使其达到1μm 的绝对准直精度, 采用激光辅助化学腐蚀工艺制造微光学系统, 可以满足这一要求。
lms511-20100使用LMS511-20100 是一款由德国雷达传感器制造商 Sick AG 生产的激光测距仪。
它是Sick LMS系列中最先进的产品之一,具有高精度和可靠性,被广泛应用于工业自动化、机器人技术、危险物品检测等领域。
LMS511-20100的最大测量范围达到了200米,测量精度为±10毫米。
它使用了一种特殊的固态激光器来发射激光束,并通过相位差测量技术来计算与目标物的距离。
由于其高精度和长测量范围,LMS511-20100能够在复杂的环境中准确测量目标物的距离,为用户提供准确的测量数据。
LMS511-20100具有比较低的功耗,只需要2.5瓦的能量供给。
它还采用了雷射二极管来供电,有效降低了能源消耗。
这意味着LMS511-20100可以长时间运行而无需频繁更换电池或充电。
该传感器还具有高速扫描功能,每秒最多扫描接近1000次。
这使得它适用于需要快速反应的应用,如机器人导航、运动控制等。
扫描数据可以通过以太网接口进行传输和处理,用户可以轻松地将其集成到现有系统中。
LMS511-20100还配备了一套功能强大的软件和算法,可以实现多种功能。
例如,它可以检测和识别不同类型的物体,包括人体、车辆、建筑物等。
这为智能交通、安防监控等应用提供了良好的支持。
此外,LMS511-20100还具有抗干扰性能强、耐高温、防尘防水等特点,适用于各种恶劣环境下的应用。
它的紧凑设计和简单的安装方式,使得用户能够轻松地将其安装在各种设备上。
总的来说,LMS511-20100是一款功能强大、高精度和可靠性的激光测距仪。
它在工业自动化、机器人技术、危险物品检测等领域中有着广泛的应用。
其优越的性能和多功能性使得LMS511-20100成为了许多用户的首选,为他们提供准确、可靠的测量数据,提高了工作效率和安全性。
激光雷达的原理与目标识别技术激光雷达是一种利用激光束进行测距和目标识别的高精度传感器。
它通过发射激光束并测量返回的激光信号来获取目标的位置、速度和形状等信息。
激光雷达的工作原理基于光的传播和反射原理,它在自动驾驶、机器人导航、环境感知等领域有着广泛的应用。
激光雷达的工作原理可以简单地描述为:它通过发射激光束,并记录激光束从发射到接收所经历的时间,然后根据光速和时间差计算出目标与雷达的距离。
同时,激光雷达还可以通过测量激光束的强度来获取目标的反射率,从而进一步分析目标的性质和形状。
激光雷达的核心部件是激光发射器和激光接收器。
激光发射器通常使用固态激光器或半导体激光器,它们能够产生高功率、高频率的激光束。
激光接收器则用于接收返回的激光信号,并将其转化为电信号进行处理和分析。
激光雷达还包括扫描系统,用于控制激光束的方向和范围,以实现对目标的全方位扫描和测量。
激光雷达的目标识别技术是激光雷达应用的关键之一。
目标识别是指通过分析激光雷达返回的信号,判断目标的类型、形状和状态等信息。
目标识别技术可以分为几何识别和语义识别两种。
几何识别是指通过分析目标的几何特征,如形状、大小和轮廓等,来判断目标的类型和形态。
几何识别技术通常通过对激光雷达返回的点云数据进行处理和分析来实现。
点云数据是激光雷达返回的一系列离散点的坐标信息,它可以表示目标的三维形状和位置。
几何识别技术可以通过对点云数据进行聚类、分割和拟合等操作,来提取目标的几何特征,并进行目标分类和形态分析。
语义识别是指通过分析目标的语义特征,如颜色、纹理和运动等,来判断目标的类型和状态。
语义识别技术通常通过对激光雷达返回的强度和反射率等信息进行处理和分析来实现。
强度信息可以反映目标的反射率和反射强度,从而判断目标的材质和表面特征。
反射率信息可以用于判断目标的颜色和纹理等特征。
运动信息可以通过对激光雷达返回的多个时间点的数据进行比较和分析,来判断目标的运动状态和轨迹。
简述激光雷达的原理及特点激光雷达(Lidar)是一种利用激光技术进行测距和探测的传感器,具有高精度、高分辨率和长测距等特点。
它通过发射激光束并测量其返回时间来计算目标物体的距离和位置。
激光雷达在自动驾驶、环境感知、地图绘制等领域具有广泛应用。
激光雷达的原理是利用激光器发射激光束,然后通过接收器接收激光束的反射信号。
激光器发射的激光束经过透镜系统聚焦成一个非常小的光斑,然后照射到目标物体上。
目标物体对激光束的反射会使得一部分光返回到激光雷达的接收器上。
接收器接收到返回的光信号后,通过测量光的时间延迟来计算目标物体与激光雷达之间的距离。
同时,激光雷达还可以通过测量激光束的散射角度和接收到的光的强度来获取目标物体的位置和形状信息。
激光雷达具有以下几个特点:1. 高精度:激光雷达可以实现毫米级的距离测量精度,可以准确地测量目标物体与激光雷达之间的距离。
2. 高分辨率:激光雷达可以通过调整激光束的角度和分辨率来获取目标物体的位置和形状信息。
它可以在较短的时间内获取大量的数据,从而实现对目标物体的精确探测和测量。
3. 长测距:激光雷达可以实现长距离的测量,一般可以达到几百米甚至几千米的距离。
这使得激光雷达在遥感、无人机和自动驾驶等领域具有广泛的应用。
4. 多目标探测:激光雷达可以同时探测多个目标物体,而且在探测过程中不会相互干扰。
这使得激光雷达在自动驾驶和环境感知等领域具有很大的优势。
激光雷达在自动驾驶领域的应用越来越广泛。
它可以实时获取道路上的障碍物、行人和车辆等信息,为自动驾驶系统提供高精度、高分辨率的环境感知能力。
激光雷达还可以用于制作高精度的地图,为自动驾驶车辆提供准确的定位和导航信息。
激光雷达还广泛应用于测绘、遥感和环境监测等领域。
它可以快速准确地获取地形、建筑物和植被等信息,为城市规划、土地利用和环境保护等提供重要的数据支持。
激光雷达是一种利用激光技术进行测距和探测的传感器,具有高精度、高分辨率和长测距等特点。
激光雷达的原理及应用1. 激光雷达的原理激光雷达(Lidar)是一种利用激光技术进行目标测距与成像的传感器。
其工作原理是利用激光器发射一束激光,然后利用接收器接收被测目标反射回来的激光波束,并通过测量激光的时间飞行或相位差,计算出目标与激光雷达的距离、角度和位置等信息。
1.1 激光的发射与接收激光雷达的激光发射器通常使用固态激光器或半导体激光器。
这些激光器能够发射出高功率、短脉冲宽度的激光束。
激光束从雷达设备中发射出去后,会遇到被测目标,并被目标表面反射。
接收器一般由一个或多个光电二极管组成,用于接收被测目标反射的激光光束。
接收到的光信号会在接收器中被转换成电信号进行处理和分析。
1.2 时间飞行和相位测量激光雷达通常使用两种方法来测量激光的时间飞行或相位差。
1.2.1 时间飞行法时间飞行法是基于光的速度恒定这一原理。
激光雷达发射一束激光光束,然后测量光束从发射器到目标和回到接收器的时间。
通过光的速度和时间飞行的差值,可以计算出目标与激光雷达之间的距离。
1.2.2 相位差法相位差法是基于波长的特性进行测量。
激光雷达发射一束相干激光,然后测量被测目标反射回来的光与发射光之间的相位差。
通过相位差的测量,可以计算出目标与激光雷达之间的距离。
2. 激光雷达的应用激光雷达作为高精度测距和成像的传感器,广泛应用于各个领域。
2.1 自动驾驶激光雷达在自动驾驶领域发挥着重要作用。
通过激光雷达的高精度距离测量和成像能力,自动驾驶车辆可以实时感知周围的道路状况、障碍物等信息,从而做出智能的驾驶决策。
激光雷达可以提供高分辨率的地图数据,帮助车辆进行定位和导航。
2.2 机器人导航激光雷达在机器人导航中也有广泛应用。
激光雷达能够提供机器人所处环境的精确地图数据,为机器人的路径规划和避障提供支持。
通过激光雷达的数据,机器人可以准确感知周围的障碍物和环境,从而进行精确的导航和操作。
2.3 三维建模激光雷达可以生成高精度的三维点云数据,用于进行三维建模和虚拟现实应用。
SICK 距离和LiDAR 激光扫描传感器
SICK FROM MICRON TO MILE
SICK 距离和LiDAR 激光扫描传感器可提供各种应用环境、测量维度和扫描距离的解决方案。
近几十年,自动化在几乎所有工业领域都取得了蓬勃发展。
SICK 提供的距离以及区域扫描检测方案,一直引领最前沿的技术潮流。
作为智能数据来源,其可以在各种复杂环境和不同距离上,为各种应用提供精确信息。
基于领先全球的技术和产品,SICK 将跨行业的知识,应用于各维度的测量和检测任务,例如在移动式设备、基础设施、物流或自动化生产线等方面。
这些都是协助您取得更大成功的最佳选择!
德国西克SICK 可以提供基于超声波、光或雷达等技术为基础的室内室外解决方案,测量距离和维度非常多样化。
为了满足客户不同的集成和现场安装需求,SICK 的产品有模拟量、串口、现场总线、IO-Link 和以太网接口等。
sick microscan3 参数
sick microScan3 是一款高性能的激光扫描测距传感器,广泛应用于工业自动化、机器人导航、无人驾驶等领域。
以下是关于sick microScan3 的一些重要参数和特性的详细描述:
测量原理:microScan3 采用激光三角测量原理进行距离测量。
它通过发射激光束并接收从目标物体反射回来的光线,根据光线在传感器和目标之间的传播时间或角度变化来计算距离。
测量范围:该传感器的测量范围通常在几厘米到几十米之间,具体范围取决于型号和配置。
扫描速度:microScan3 具有高速的扫描能力,可以在短时间内获取大量的距离数据,从而实现对环境的快速感知和响应。
分辨率:分辨率是指传感器能够识别的最小距离变化。
microScan3 通常具有较高的分辨率,可以精确地测量目标物体的轮廓和位置。
扫描角度:传感器的扫描角度决定了其能够覆盖的视野范围。
microScan3 通常具有较大的扫描角度,可以覆盖较宽的区域。
通信接口:该传感器支持多种通信接口,如以太网、RS485等,方便与不同的控制系统进行连接和数据传输。
工作环境:microScan3 适用于各种恶劣的工业环境,具有较高的抗干扰能力和稳定性。
软件支持:传感器提供了丰富的软件开发工具包(SDK)和API接口,方便用户进行二次开发和定制化应用。
综上所述,sick microScan3 是一款功能强大、性能稳定的激光扫描测距传感器,具有广泛的应用前景和市场需求。
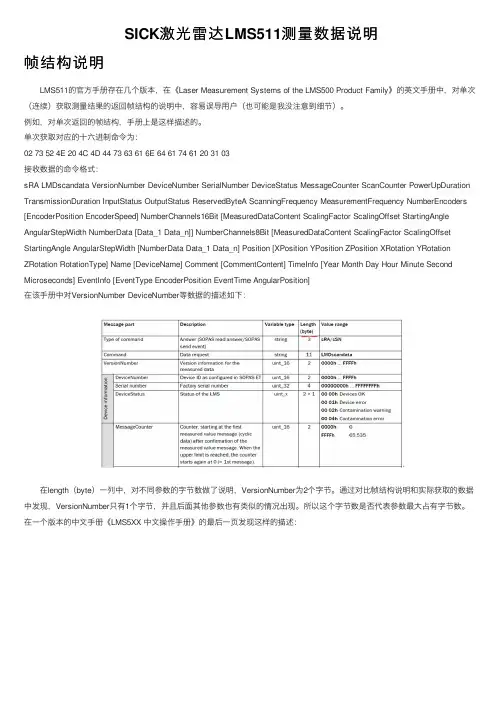
SICK激光雷达LMS511测量数据说明帧结构说明LMS511的官⽅⼿册存在⼏个版本,在《Laser Measurement Systems of the LMS500 Product Family》的英⽂⼿册中,对单次(连续)获取测量结果的返回帧结构的说明中,容易误导⽤户(也可能是我没注意到细节)。
例如,对单次返回的帧结构,⼿册上是这样描述的。
单次获取对应的⼗六进制命令为:02 73 52 4E 20 4C 4D 44 73 63 61 6E 64 61 74 61 20 31 03接收数据的命令格式:sRA LMDscandata VersionNumber DeviceNumber SerialNumber DeviceStatus MessageCounter ScanCounter PowerUpDuration TransmissionDuration InputStatus OutputStatus ReservedByteA ScanningFrequency MeasurementFrequency NumberEncoders [EncoderPosition EncoderSpeed] NumberChannels16Bit [MeasuredDataContent ScalingFactor ScalingOffset StartingAngle AngularStepWidth NumberData [Data_1 Data_n]] NumberChannels8Bit [MeasuredDataContent ScalingFactor ScalingOffset StartingAngle AngularStepWidth [NumberData Data_1 Data_n] Position [XPosition YPosition ZPosition XRotation YRotation ZRotation RotationType] Name [DeviceName] Comment [CommentContent] TimeInfo [Year Month Day Hour Minute Second Microseconds] EventInfo [EventType EncoderPosition EventTime AngularPosition]在该⼿册中对VersionNumber DeviceNumber等数据的描述如下:在length(byte)⼀列中,对不同参数的字节数做了说明,VersionNumber为2个字节。

激光雷达基础知识激光雷达(Lidar)是一种利用激光技术进行测距和探测的仪器。
它通过发射一束激光束,然后测量激光束从发射点到目标物体再返回接收点所需的时间来计算目标物体的距离。
激光雷达具有高精度、高分辨率和快速测量等优点,因此在自动驾驶、地质勘探、环境监测等领域得到了广泛应用。
激光雷达的工作原理是利用激光束在空间中传播的特性来测量目标物体的距离。
当激光束照射到目标物体上时,一部分激光会被目标物体吸收或散射,一部分激光会返回到激光雷达的接收器上。
通过测量激光从发射器到接收器的时间,可以计算出目标物体的距离。
激光雷达通常由激光发射器、接收器、时钟和数据处理单元等组成。
激光发射器一般采用固态激光器或半导体激光器,可以发射出高能量、高频率和短脉冲宽度的激光束。
接收器用于接收返回的激光信号,并将其转换为电信号。
时钟用于同步发射和接收激光信号,确保测量的准确性。
数据处理单元用于处理接收到的激光信号,并计算目标物体的距离和其他相关信息。
激光雷达的测量精度取决于多个因素,包括激光束宽度、激光功率、接收器的灵敏度等。
为了提高测量精度,可以采用多点测量、多波长测量和多角度测量等方法。
此外,还可以通过增加激光雷达的分辨率和采样率来提高测量精度。
激光雷达的应用非常广泛。
在自动驾驶领域,激光雷达可以用于实时感知周围环境,识别障碍物和道路状况,从而帮助车辆做出正确的决策和行驶路径规划。
在地质勘探中,激光雷达可以用于测量地形的高程和形状,帮助科学家了解地球表面的变化和地质结构。
在环境监测中,激光雷达可以用于测量大气污染物的浓度和分布,监测空气质量和环境污染程度。
尽管激光雷达具有许多优点和广泛的应用前景,但它也存在一些限制。
首先,激光雷达的成本较高,限制了其在一些应用领域的推广和应用。
其次,激光雷达对环境的要求较高,例如在雨雪天气或大气浑浊的情况下,激光雷达的测量精度可能会受到影响。
此外,激光雷达还存在一些安全隐患,例如激光束直接照射到人眼可能会造成眼睛损伤。
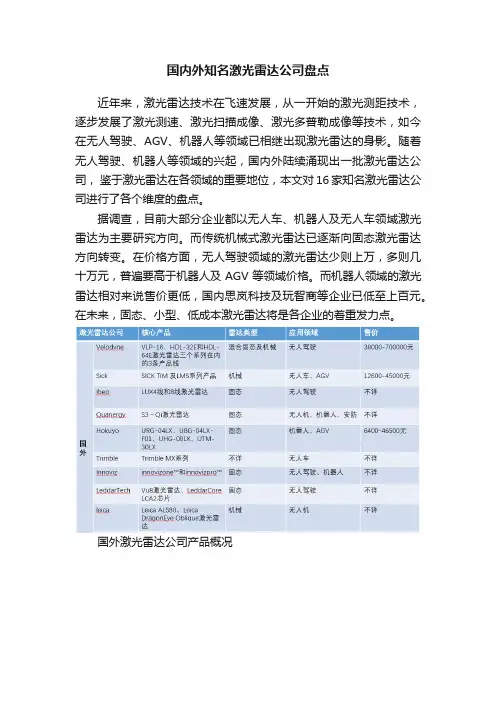
国内外知名激光雷达公司盘点近年来,激光雷达技术在飞速发展,从一开始的激光测距技术,逐步发展了激光测速、激光扫描成像、激光多普勒成像等技术,如今在无人驾驶、AGV、机器人等领域已相继出现激光雷达的身影。
随着无人驾驶、机器人等领域的兴起,国内外陆续涌现出一批激光雷达公司,鉴于激光雷达在各领域的重要地位,本文对16家知名激光雷达公司进行了各个维度的盘点。
据调查,目前大部分企业都以无人车、机器人及无人车领域激光雷达为主要研究方向。
而传统机械式激光雷达已逐渐向固态激光雷达方向转变。
在价格方面,无人驾驶领域的激光雷达少则上万,多则几十万元,普遍要高于机器人及AGV等领域价格。
而机器人领域的激光雷达相对来说售价更低,国内思岚科技及玩智商等企业已低至上百元。
在未来,固态、小型、低成本激光雷达将是各企业的着重发力点。
国外激光雷达公司产品概况国内激光雷达公司产品概况激光雷达赛道争宠各领域“头号玩家”花落谁家从下表中我们可以看到,目前各家公司在激光雷达研发中都有其深耕的一个或多个领域,在激光雷达群雄逐鹿的赛道中,各领域的“头号玩家”究竟花落谁家。
各企业激光雷达应用领域细分机器人领域机器人领域,目前所涉及的企业包括了国外的Sick 、Ibeo、Hokuyo、Trimble以及国内的思岚科技、速腾聚创、禾赛科技、北醒光子、玩智商、镭神智能。
在这众多企业中,思岚科技无论是从价格、寿命还是性能上来说都具有领先优势,如今,在服务机器人领域思岚科技已占据了70%以上的市场份额。
思岚科技成立于2013年,它是业内最早从事机器人定位导航技术探索及研发的企业,其自主研发的激光雷达产品及机器人定位导航方案在服务机器人领域具备更高的性能及稳定性,截止目前,思岚科技的技术已覆盖海内外20多个国家和地区,服务超过了2000家企业和10万个人用户,在微软、壳牌、优必选、科大讯飞、软银等知名企业的服务机器人项目中均有思岚科技产品的身影。
目前旗下已研发出五款高质量激光雷达产品,从三角测距激光雷达RPLIDAR A1/A2/A3到TOF激光雷达RPLIDAR S1再到后期推出的全新激光雷达品类SLAMTEC Mapper(内置建图和定位功能),思岚科技实现了一次又一次的突破,奠定了其在机器人定位导航领域的领先地位。
激光雷达的工作原理
激光雷达是一种通过激光束探测和测量目标位置和距离的设备。
它的工作原理基于激光束的发射、反射和接收。
首先,激光器发射出激光束,并将其聚焦成一个非常细小和狭窄的激光束。
这个激光束由许多单色光波组成,它们具有相同的频率和相位。
接下来,激光束照射到目标物体上,并被目标物体表面反射或散射。
目标物体可能是任何可以反射或散射光的物体,如建筑物、车辆或人体。
然后,激光雷达接收器接收反射回来的激光束。
接收器通常包含一个高灵敏度的光探测器,它可以测量激光束的强度和时间。
最后,通过测量激光束从发射到接收的时间差,激光雷达可以计算出目标物体距离的精确数值。
这是根据激光在真空中传播速度恒定的特性和时间-距离关系来实现的。
除了测量目标物体的距离,激光雷达还可以测量目标物体的位置和速度。
它可以通过扫描整个场景并将反射信号的方向和位置信息与激光束的位置相关联来实现。
这样一来,激光雷达可以不仅检测到目标物体的存在,还可以提供关于目标物体的详细信息。
总之,激光雷达通过发射、反射和接收激光束来测量目标物体
的距离、位置和速度。
它的工作原理基于激光的传播速度恒定和时间-距离关系。
SICK全新推出TiM迷你型激光雷达
佚名
【期刊名称】《现代制造》
【年(卷),期】2018(000)027
【摘要】新式电动升降车、拣选叉车、牵引车和移动运输平台通过半自动化运行方式,为用户带来额外应用潜力。
SICKTiM系列的2DLiDAR传感器不仅能确保车辆平稳行驶,还能提供精确的导航测量数据。
除此之外,更首次针对相应的安全类应用提供了性能安全等级为PLb的2DLiDAR传感器。
【总页数】1页(P32-32)
【正文语种】中文
【中图分类】TP393
【相关文献】
1.SICK TIM351迷你型激光扫描器 [J],
2.SICK推出TIM351迷你型激光扫描器 [J],
3.SICK新一代迷你型激光扫描器TiM551面世 [J],
4.西克推出TIM351迷你型激光扫描器 [J],
5.宏正自动科技推出全新迷你型Cat 5 DVI视频延长器 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
LMS1000 和MRS1000 红外激光雷达传感器,更准确
可靠的距离感测
随着LMS1000 和MRS1000 红外激光雷达(LiDAR)传感器相继推出,德国西克公司(SICK)LiDAR 技术在测量精度和可靠性上都有了进一步提升。
它可提供更准确可靠的距离感测,尤其是在恶劣的环境条件下。
SICK 的LMS1000 和MRS1000 红外LiDAR 传感器
在采矿和采石工作场所,结构坚固、轻便、紧凑且配有可旋转接头的传感器是理想选择,因此这些传感器可以容易地按工厂定制或改装到现有设备
上。
它们可以安装在机械架、起重机和龙门架、墙壁、入口上方或任何便于
最佳视点安置的地方。
SICK 的LMS 和MRS 传感器增加了SICK 创新的HDDM +(高清距离测量)三重回波扫描技术,即使传感器面临恶劣的环境条件,也能确保获得
的性能具有高度一致性。
当使用劣质LiDAR 传感器或其他替代技术时,大雨、雪、薄雾或灰尘的影响将可能导致错误信号。
SICK 负责成像、测量、测距和系统的全国产品经理Neil Sandhu 解释说:三重回波激光扫描技术意味着即使在恶劣的环境条件下,操作人员也可以对。
西克推出TIC502激光雷达(LiDAR)交通管理和预
警系统
据麦姆斯咨询报道,Sick(西克)近日推出了TIC502激光雷达
(LiDAR)交通管理和预警系统,据介绍,这款系统最高能够每秒扫描车辆100次,为经过的每辆汽车生成精度高达99%的3D轮廓图。
这款全天后解决
方案可用于快车道、自由穿行及静态交通的车辆计数,以便对交通状况进行
实时管理,并根据国际运输分类标准对所有车型进行电子收费评估。
TIC502
的探测距离最高可达40米,最低安装高度需高于最高车辆1.5米,其车型分
类精度高于98%,车速测量精度在100kph内为+/- 3kph,100kph以上为+/- 3%。
西克TIC502 LiDAR系统包含了一对以一定角度安装在底板上的两个LiDAR传感器,整个系统通过底板直接安装在车道上方,同时,搭配使用的
一款TIC交通控制器可安装在高速公路控制室内。
基于Class 1(1级)人眼
安全的红外LiDAR激光传感器,系统探测的3D交通视图可以在控制室显示
屏上实时显示,并对运动中的车辆进行自动校正。
此外,这款解决方案能够支持从-40℃到60℃的各种天气条件,还可以结
合额外的2D LiDAR传感器,为交通分析和评估提供车轴计数。
其交通控制
器能够自动存储最近探测的50辆汽车的历史数据,这些探测数据可通过FTP
或者UNC传输并存储在用户的系统中。
西克成像、测量、测距系统产品经
理Neil Sandhu说:“TIC502能够一年四季在任何天气条件下,高可靠地生成。