基于趋近律方法的舰载遥控武器站滑模控制研究
- 格式:pdf
- 大小:866.77 KB
- 文档页数:5

滑模控制趋近律参数
摘要:
一、滑模控制简介
1.滑模控制的定义
2.滑模控制的优势
二、趋近律参数
1.趋近律参数的定义
2.趋近律参数的作用
三、滑模控制趋近律参数的调整
1.调整方法
2.调整过程
3.调整结果
四、滑模控制趋近律参数在实际应用中的意义
1.提高控制精度
2.优化控制效果
3.降低系统误差
正文:
滑模控制是一种非线性控制策略,其通过模拟滑动模态来达到控制目标。
在实际应用中,滑模控制能够实现对系统的快速响应和精确控制,因此被广泛应用于各种领域。
然而,滑模控制的效果受到趋近律参数的影响,因此对趋近律参数的调整是提高控制效果的关键。
趋近律参数是滑模控制中一个重要的参数,其定义了控制律的饱和程度。
通过调整趋近律参数,可以改变控制律对系统误差的响应,从而优化控制效果。
在实际调整过程中,通常需要根据系统的特性和控制需求来进行。
首先,需要对系统进行建模,并确定滑模控制的模型。
然后,通过仿真或实验来收集系统的数据,以此作为调整趋近律参数的依据。
接着,根据系统数据和控制需求,对趋近律参数进行调整。
通常情况下,可以通过调整参数的大小或使用不同的函数形式来改变趋近律的饱和程度。
调整滑模控制趋近律参数后,可以观察到控制效果的显著提升。
一方面,调整趋近律参数能够提高控制的精度,使系统能够更快地达到预期状态。
另一方面,优化趋近律参数还能够降低系统的误差,提高整体的控制效果。
总的来说,滑模控制趋近律参数在实际应用中具有重要意义。

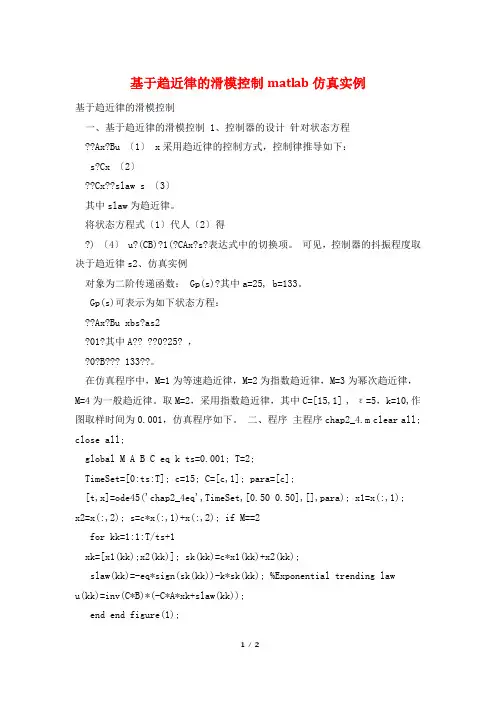
基于趋近律的滑模控制matlab仿真实例基于趋近律的滑模控制一、基于趋近律的滑模控制 1、控制器的设计针对状态方程??Ax?Bu 〔1〕 x采用趋近律的控制方式,控制律推导如下:s?Cx 〔2〕??Cx??slaw s 〔3〕其中slaw为趋近律。
将状态方程式〔1〕代人〔2〕得?) 〔4〕 u?(CB)?1(?CAx?s?表达式中的切换项。
可见,控制器的抖振程度取决于趋近律s2、仿真实例对象为二阶传递函数: Gp(s)?其中a=25, b=133。
Gp(s)可表示为如下状态方程:??Ax?Bu xbs?as2?01?其中A?? ??0?25? ,?0?B??? 133??。
在仿真程序中,M=1为等速趋近律,M=2为指数趋近律,M=3为幂次趋近律,M=4为一般趋近律。
取M=2,采用指数趋近律,其中C=[15,1] , ε=5,k=10,作图取样时间为0.001,仿真程序如下。
二、程序主程序chap2_4.m clear all; close all;global M A B C eq k ts=0.001; T=2;TimeSet=[0:ts:T]; c=15; C=[c,1]; para=[c];[t,x]=ode45('chap2_4eq',TimeSet,[0.50 0.50],[],para); x1=x(:,1);x2=x(:,2); s=c*x(:,1)+x(:,2); if M==2for kk=1:1:T/ts+1xk=[x1(kk);x2(kk)]; sk(kk)=c*x1(kk)+x2(kk);slaw(kk)=-eq*sign(sk(kk))-k*sk(kk); %Exponential trending lawu(kk)=inv(C*B)*(-C*A*xk+slaw(kk));end end figure(1);plot(x(:,1),x(:,2),'r',x(:,1),-c*x(:,1),'b');xlabel('x1');ylabel('x2'); figure(2); plot(t,x(:,1),'r');xlabel('time(s)');ylabel('x1'); figure(3); plot(t,x(:,2),'r');xlabel('time(s)');ylabel('x2'); figure(4); plot(t,s,'r');xlabel('time(s)');ylabel('s'); if M==2 end子程序chap2_4eq.mfunction dx=DynamicModel(t,x,flag,para) global M A B C eq k a=25;b=133; c=para(1); s=c*x(1)+x(2); A=[0 1;0 -a]; B=[0;b]; M=2; eq=5.0;if M==2 % M=1为等速趋近律,M=2为指数趋近律,M=3为幂次趋近律,M=4为一般趋近律slaw=-eq*sign(s); %Equal velocity trending law elseif M==2 k=10; sl xlabel('time(s)');ylabel('u');u=inv(C*B)*(-C*A*x+slaw); dx=zeros(2,1); dx(1)=x(2);dx(2)=-a*x(2)+b*u;三、仿真结果〔1〕M=2时,指数趋近律10-1-2-3x2-4-5-6-7-8-0.100.10.2x10.30.40.50.6图1 滑模运动的相轨迹0.60.50.40.3x10.20.10-0.100.20.40.60.81time(s)1.21.41.61.82图2 x1 的收敛过程0.50-0.5x2-1-1.5-2-2.500.20.40.60.81time(s)1.21.41.61.82图3 x2 的收敛过程。

基于新型趋近律的欠驱动系统解耦滑模控制随着科技的发展和应用的广泛,欠驱动系统在机械工程、电子工程、航空航天等领域中得到了广泛的应用。
然而,由于欠驱动系统的自身特性,其控制具有一定的困难性。
滑模控制作为一种有效的控制方法,被广泛应用于欠驱动系统中,可以有效地解决系统存在的不确定性和非线性问题。
本文将介绍一种基于新型趋近律的欠驱动系统解耦滑模控制方法。
1. 欠驱动系统简介欠驱动系统是指系统中约束条件大于可控自由度的系统,例如双摆系统、倒立摆等。
由于约束条件的存在,系统的控制变得更加复杂。
该类系统具有非线性、不确定性和高度耦合等特性,传统的控制方法往往无法满足其控制需求。
2. 滑模控制基本原理滑模控制是一种基于阶跃反应的控制方法,通过引入滑模面,并使系统状态在该面上滑动,实现对系统的控制。
它具有强大的鲁棒性和抗扰动能力,在非线性系统中得到了广泛的应用。
3. 新型趋近律传统滑模控制存在着滑模面设计的不确定性和超调量大等问题,为了克服这些问题,研究者提出了新型趋近律方法。
新型趋近律基于连续函数设计滑模面,可以实现系统的快速、稳定的跟踪控制。
4. 基于新型趋近律的欠驱动系统解耦滑模控制方法基于新型趋近律的欠驱动系统解耦滑模控制方法主要包括以下几个步骤:(1)建立欠驱动系统的动力学模型和约束条件,并对系统进行状态变量的定义和表示;(2)根据系统的特性设计新型趋近律滑模面,并计算滑模控制律;(3)利用滑模控制律进行系统的控制,并优化控制算法以提高系统的稳定性和鲁棒性;(4)通过求解优化问题得到系统的最优滑模面,并进行参数整定与优化;(5)设计仿真实验验证方法的有效性和性能指标。
5. 研究成果与应用展望基于新型趋近律的欠驱动系统解耦滑模控制方法在实际应用中取得了一定的研究成果。
该方法可以有效地解决欠驱动系统控制中的不稳定性和耦合性问题,并具有较好的鲁棒性和抗干扰能力。
未来,可以进一步改进该方法,提高系统的控制性能和扩展应用范围。

基于新型趋近律的无刷直流电机滑模控制崔保春;文迪;马思远;王立鹏【摘要】利用非线性幂次组合函数和双曲正切函数提出了一种新型滑模趋近律,采用积分滑模面设计切换函数,构造了一种无刷直流电机趋近律滑模变结构控制的调速方式,并利用Lyapunov判据证明了其稳定性.在Simulink环境下对控制系统进行仿真实验,仿真结果表明:该控制算法具有动态响应快速、基本无超调,且对于外部负载转矩扰动和电机内部参数变化的干扰具有较强的鲁棒性.【期刊名称】《电气传动》【年(卷),期】2019(049)004【总页数】4页(P3-5,32)【关键词】无刷直流电机;趋近律;滑模变结构控制;鲁棒性【作者】崔保春;文迪;马思远;王立鹏【作者单位】山东科技大学电气与自动化工程学院,山东青岛 266590;山东科技大学电气与自动化工程学院,山东青岛 266590;山东科技大学电气与自动化工程学院,山东青岛 266590;山东科技大学电气与自动化工程学院,山东青岛 266590【正文语种】中文【中图分类】TM351无刷直流电机(BLDCM)具有高效率、长寿命以及良好的机械特性等优点,在工业领域得到了非常广泛的应用[1]。
随着电机技术的日趋成熟,对电机的控制性能提出了相对较高的要求。
BLDCM是一个多变量、强耦合、非线性和变参数的复杂控制对象,很难得到比较精确的数学模型,导致传统的PI控制无法达到理想的控制效果。
滑模变结构控制可以迫使系统在一定特性下沿规定的状态轨迹进行滑模运动[2],且与系统参数及扰动无关,在内外扰动下系统具有良好的鲁棒性。
文献[3]采用指数趋近律滑模变结构算法对电机进行调速控制,但指数趋近律在原点处存在带状高频抖动,影响电机调速性能。
文献[4]将模糊控制策略引入变结构控制中,一定程度上抑制了系统抖振。
文献[5]采用双幂次趋近律对电机进行滑模控制,相比于传统指数趋近律滑模控制方式具有更快的趋近运动速度。
本文利用fal函数与双曲正切函数构造了一种新型趋近律滑模控制算法,并应用到BLDCM调速控制系统中。

滑模控制趋近律
滑模控制是一种非线性控制方法,在工业控制系统中有着广泛的应用。
然而,在实际应用中,由于系统模型的不确定性、外界扰动、传感器误差等因素的存在,会对控制系统的灵敏度、鲁棒性、控制精度等方面造成影响。
为了解决滑模控制中的这些问题,提高控制系统的性能和鲁棒性,滑模控制趋近律应运而生。
滑模控制趋近律是一种利用滑模控制思想,通过引入趋近律来使控制系统更加稳定和鲁棒的控制方法。
其主要思想是将滑模控制的切换逻辑变为连续的,通过一个趋近函数来控制系统的演化,从而达到在易受干扰时保持较高的控制精度和鲁棒性的效果。
滑模控制趋近律的基本思路是通过引入一个趋近函数g(x)来避免滑模控制中的切换逻辑产生的chattering现象。
越过了滑模曲面后,趋近函数趋于零,使得系统能够稳定地运行。
该趋近函数的选择应该能够在滑模曲面(或者一定范围内)内逐渐趋于零,满足Lyapunov稳定性条件。
滑模控制趋近律中的趋近函数可以通过LMI(线性矩阵不等式)来获得。
在实际应用中,滑模控制趋近律也需要考虑到系统模型误差、传感器误差等问题。
为此,在滑模控制趋近律中引入了自适应控制和模型预测控制等技术。
自适应控制可以根据系统的实际状态来对控制器参数进行调整,从而消除模型误差对控制性能的影响。
而模型预测控制则可以通过将未来状态预测与控制相结合,来提高控制系统的性能和鲁棒性。
总之,滑模控制趋近律是一种利用趋近函数来消除切换逻辑对控制性能影响的非线性控制方法。
它不仅可以提高系统的稳定性和鲁棒性,还可以通过引入自适应控制和模型预测控制等技术来对系统的误差和干扰进行抵抗,从而获得更好的控制性能。

基于新型趋近律滑模控制研究一、研究背景随着智能化、自动化技术的不断发展,越来越多的工业控制系统开始采用滑模控制方法。
然而,传统滑模控制存在着抖动现象和参数选择困难等问题。
为了解决这些问题,研究人员提出了新型趋近律滑模控制方法。
二、新型趋近律滑模控制原理新型趋近律滑模控制方法是在传统滑模控制基础上引入了趋近律思想,通过引入一个辅助函数来消除系统的抖动现象。
其基本原理如下:1. 设定一个目标状态值,将其与当前状态值进行比较得到误差。
2. 通过引入一个辅助函数来消除系统的抖动现象。
3. 将误差和辅助函数作为输入信号,经过计算得到一个控制量。
4. 将计算得到的控制量作为输出信号,实现对系统的控制。
三、新型趋近律滑模控制优点相比传统滑模控制方法,新型趋近律滑模控制具有以下优点:1. 抗干扰性强:由于引入了辅助函数,可以有效消除系统的抖动现象,提高了系统的稳定性和抗干扰能力。
2. 参数选择简单:传统滑模控制方法需要对滑模面和控制参数进行调整,而新型趋近律滑模控制方法只需要选择一个合适的辅助函数即可。
3. 控制精度高:由于消除了系统的抖动现象,可以实现更加精确的控制。
四、新型趋近律滑模控制应用新型趋近律滑模控制方法已经广泛应用于各种工业控制系统中,包括机械加工、电力电子、航空航天等领域。
例如,在机械加工中,新型趋近律滑模控制可以实现对机床速度和位置的精确控制;在电力电子中,可以实现对变频器输出电压和电流的稳定调节;在航空航天中,可以实现对飞行器姿态和位置的精确控制等。
五、研究展望虽然新型趋近律滑模控制方法具有许多优点,但仍存在一些问题需要进一步研究。
例如,在复杂系统中如何选择合适的辅助函数仍然是一个难点;如何在实际应用中解决控制器参数的不确定性问题也需要进一步研究。
因此,未来的研究可以从以下几个方面展开:1. 研究不同辅助函数的适用范围和性能。
2. 研究新型趋近律滑模控制方法在复杂系统中的应用。
3. 研究新型趋近律滑模控制方法的鲁棒性和稳定性。

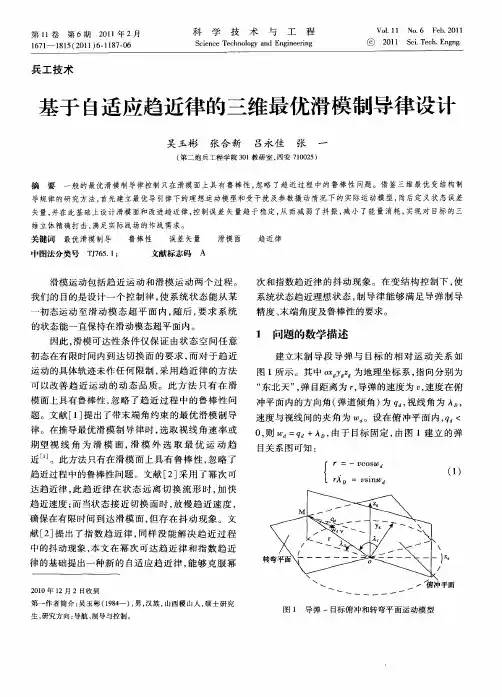
■技术探讨与研究TECHNIQUE RESEARCH基于趋近律的牵引电机滑模变结构控制研究Sliding Mode Variable Structure Control of Traction Motor Based on Reaching Law大连交通大学电气信息学院刘欢(Liu Huan)李东辉(Li Donghui)大连交通大学动车运用与维护工程学院孙燕楠(Sun)摘要:电力机车牵引电机负荷变化大、调速范围广,对其控制是否准确、快速、平稳直接决定行车安全与否。
本文构建了一种基于趋近律的滑模变结构(SMC)矢量控制算法,即设计基于指数趋近律的转矩电流控制器代替传统的转速PI调节器,利用李雅普诺夫函数设计并证明了滑动模态的存在性及控制器的稳定性。
最终将该控制算法用于某一牵引电机的调速控制仿真,并与传统的PI矢量控制进行比较,结果表明,所构建的SMC控制算法抑制抖振的同时具有较强的鲁棒性,而且显著降低了电磁转矩的脉动。
关键词:牵引电机;趋近律;SMC;电磁转矩脉动;鲁棒性Abstract:The electric locomotive traction motor has a large load change and a wide range of speed regulation. The accurate,fast and stable control determines whether the driving is safe.A sliding mode variable structure (SMC)Vector Control Algorithm based on the reaching law is constructed.The torque current controller based on exponential reaching law is designed to replace the traditional PI regulator of speed.Besides the existence of the sliding mode and the stability of the controller are proved and designed by Lyapunov function.Finally,the control algorithm is applied to control the speed of a traction pared with the traditional PI vector control the result shows that the proposed SMC control algorithm can have strong robustness while suppress!ng the chattering and reduce the ripple of the electromagnetic Torque significantly.Key words:Traction motor;Reaching Imw;SMC;Electromagnetic torque ripple;Robustness【中图分类号]TM922.71[文献标识码】B【文章编号】1561-0330(2019)09-084-051引言牵引电机作为动车组牵引变流系统的主要能量转换设备,直接关系到列车的运行状态、寿命和安全。

滑模控制的趋近律设计
滑模控制是一种常用的非线性控制方法,其基本思想是通过引入一个滑动面,使得系统状态在该滑动面上“滑动”,从而达到控制系统的稳定控制。
然而,传统的滑模控制方法存在一些缺陷,如滑动面的设计需要对系统动态特性有较深的了解,控制器参数的选取对系统鲁棒性的影响较大等。
为了解决这些问题,近年来出现了一种新型的滑模控制方法——趋近律滑模控制。
该方法不仅能够保证系统的稳定性和鲁棒性,还能够通过引入趋近律来提高系统的收敛速度和控制精度。
趋近律滑模控制的设计过程主要包括以下几个步骤:
1. 确定系统模型和控制目标,建立系统的数学模型。
2. 设计滑动面和趋近律函数。
滑动面的设计应使得系统状态能够在该面上“滑动”,同时趋近律函数的选择也应考虑到系统的动态特性和控制目标。
3. 设计控制器。
根据滑模控制器的基本原理,设计控制器的参数。
4. 进行仿真和实验验证。
通过仿真和实验验证控制系统的性能和控制效果。
总之,趋近律滑模控制是一种非常有效的控制方法,可以在保证系统稳定性和鲁棒性的前提下,提高系统的收敛速度和控制精度。
在实际工程应用中,需要根据具体的控制问题和系统特性进行合理的设计和参数调整。
滑模控制的趋近律滑模控制的趋近律是一种常用的控制方法,它在控制系统中起到了精确控制的作用。
滑模控制的趋近律是指控制系统在滑模面上进行调节,使系统状态快速趋近到所期望的状态。
滑模控制的趋近律需要建立一个滑模面。
滑模面是一个特定的曲面,在控制系统中起到引导系统状态趋近期望状态的作用。
滑模面的选择需要根据具体的控制系统来确定,一般可以根据系统的动态特性和性能要求来设计。
滑模面的选择对于系统的控制效果有着重要的影响,合适的滑模面可以使系统更加稳定和快速。
滑模控制的趋近律需要设计一个滑模控制律。
滑模控制律是指根据滑模面的特点来设计控制器的具体算法。
滑模控制律一般包括两个部分:滑模控制项和趋近律项。
滑模控制项主要用于实现系统的稳定性,通过调节控制器的输出来使系统状态在滑模面上运动。
趋近律项主要用于实现系统的快速趋近,通过调节控制器的输出来使系统状态迅速趋近到期望状态。
滑模控制的趋近律需要进行参数调节和性能分析。
参数调节是指根据系统的实际情况来调节滑模控制律中的参数,以达到系统控制的最佳效果。
性能分析是指通过数学模型或仿真实验等方法来评估滑模控制系统的性能,包括系统的稳定性、快速性和鲁棒性等指标。
通过参数调节和性能分析,可以优化滑模控制系统的设计,并提高系统的控制性能。
滑模控制的趋近律在实际应用中具有广泛的应用。
它可以用于各种控制系统,包括机器人控制、电力系统控制、航空航天控制等领域。
滑模控制的趋近律具有抗干扰能力强、动态性能好和适应性强的优点,能够有效地应对系统参数变化和外部扰动等问题。
滑模控制的趋近律是一种重要的控制方法,它通过建立滑模面和设计滑模控制律来实现系统的精确控制。
滑模控制的趋近律在实际应用中具有广泛的应用前景,可以提高系统的控制性能,实现系统状态的快速趋近。
通过进一步的研究和实践,滑模控制的趋近律将在更多领域发挥重要作用,推动控制技术的发展和应用。
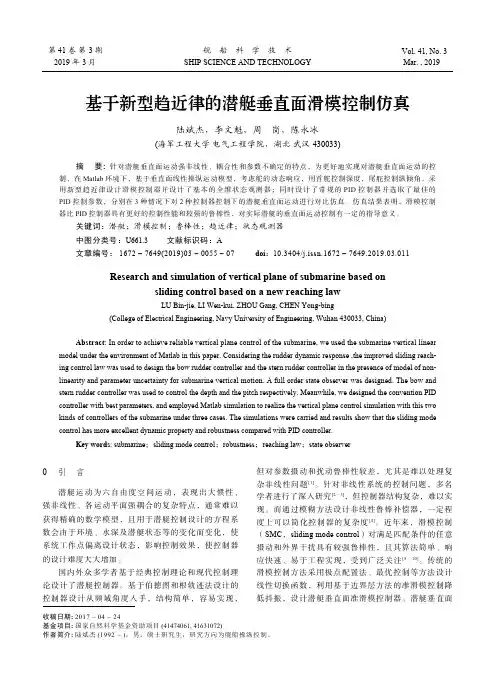
舰载稳定平台的非奇异终端滑模控制张华强;刘永钦;史普帅;冷艳礼;王学义【摘要】为提高国防武器装备的技术水平,军事上对舰载装备的稳瞄、跟踪能力提出了更高的性能需求,舰载稳定平台精度高、响应快变得尤为重要.本文提出一种新型无抖动滑模控制算法,通过非奇异终端滑模控制,消除了位置快速跟随时电流的高频抖动现象.通过Matlab仿真分析与试验验证,在双轴舰载稳定平台的伺服控制上,达到了转台无静差快速跟踪正弦位置给定信号的效果,验证了算法的有效性.%To improve the technical level of national defense weapons and equipment, the ship-borne stability platform military needs better stability and tracking ability of shipboard equipment, which makes the high precision and fast response of ship-borne stability platform become more and more important. In this paper, a novel chatting-free sliding mode control is proposed, to eliminate the high-frequency chatter phenomenon of the current in position tracking control mode by the nonsin-gular terminal sliding mode control method. Through the simulation of Matlab and experimental verification, the sinusoidal position reference signal is quickly tracked on the servo control of the biaxial ship-borne stability platform, and the effective-ness of the algorithm is verified.【期刊名称】《舰船科学技术》【年(卷),期】2018(040)002【总页数】6页(P106-110,114)【关键词】舰载稳定平台;伺服控制;滑模控制;非奇异终端【作者】张华强;刘永钦;史普帅;冷艳礼;王学义【作者单位】哈尔滨工业大学(威海)电气工程系,山东威海 264209;哈尔滨工业大学(威海)电气工程系,山东威海 264209;哈尔滨工业大学(威海)电气工程系,山东威海 264209;黄海造船有限公司,山东荣成 264309;黄海造船有限公司,山东荣成264309【正文语种】中文【中图分类】TP2750 引言舰船在航行时,由于风浪或拐弯等因素,船体的姿态时刻发生变化,而测量、目标跟踪等设备需要良好的稳定姿态,因此需要借助舰载稳定平台来维持被控对象的平稳[1–2]。
滑模变结构控制中趋近律的改进与应用周军小,刘晓飞(E-mail:zjx2008yan@)摘要:讨论了传统幂次趋近律的缺点,推导出一种新的离散趋近律,该趋近律弥补了单纯幂次趋近律在离散系统使用中的不足,并利用它设计了一种新的离散控制器。
该变结构控制系统,可保证系统运动最终趋于零点,并有降低抖振和保持快速趋近的动态品质。
对该离散趋近律的抖振进行了分析和仿真实验研究,分析和仿真结果表明该方法能保证系统状态在趋近过程中的连续性,能有效地减小系统抖振,并能保证系统渐近稳定。
关键词:变结构控制;趋近律;抖振;离散系统.Approving and Applying in the Variable Structure ControlZhou Jun Xiao,Liu Xiao FeiAbstract:Shortcomings of the power reaching law was discussed. An improved discrete reaching law is deduced, which makes up the deficiency in the discrete system based on single power reaching law, and a new discrete variable structure controller is obtained. The variable structure control system designed by using this new controller can decreasingly approach to zero. By analysing chattering of discrete reaching law, find that the system chattering is decreased and fast reaching speed is kept. Simulation and analysis results both show that the effectiveness and feasibility of the proposed method,which can make the system keep continuity and eliminate system chattering effectively, and ensure the system asymptotic stability.Key words: variable structure control; reaching law; chattering; discrete system.引言自20世纪80年代初至今,由于自动化控制的飞速发展,使得自动化控制领域的研究方向也多种多样,滑模变结构控制由于其控制对外界干扰不灵敏等优点成为了研究的热点。
采用两种趋近律的滑模控制器仿真实验
赵海滨;胡智勇
【期刊名称】《实验室科学》
【年(卷),期】2022(25)6
【摘要】对于带有建模不确定和外部干扰信号的二阶非线性系统,设计线性滑模面,分别采用指数趋近律和双幂次趋近律设计滑模控制器。
通过线性滑模面绝对值的大小进行滑模控制器的切换,并采用MATLAB/Simulink软件建立仿真实验系统。
结果表明,设计的滑模控制器能够进行二阶非线性系统的平衡控制,状态变量快速收敛到零,对建模不确定和外部干扰信号具有很好的鲁棒性。
该仿真实验有助于学生对滑模控制器的理解,有助于滑模控制器的理论教学和实验教学。
【总页数】4页(P51-54)
【作者】赵海滨;胡智勇
【作者单位】东北大学机械工程与自动化学院
【正文语种】中文
【中图分类】TP273
【相关文献】
1.滑模控制器趋近律仿真研究
2.基于不同趋近律的滑模控制仿真实验
3.采用快速幂次趋近律的滑模控制仿真实验
4.基于双幂次趋近律的终端滑模舵机控制器设计
5.PMSM的新型趋近律滑模调速控制器设计
因版权原因,仅展示原文概要,查看原文内容请购买。