第6章基于状态空间模型的极点配置设计方法
- 格式:ppt
- 大小:2.22 MB
- 文档页数:123



实验 6 极点配置与全维状态观测器的设计一、实验目的1. 加深对状态反馈作用的理解。
2. 学习和掌握状态观测器的设计方法。
二、实验原理在MATLAB 中,可以使用acker 和place 函数来进行极点配置,函数的使用方法如下:K = acker(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。
K = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。
[K,PREC,MESSAGE] = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵,PREC 为特征值,MESSAGE 为配置中的出错信息。
三、实验内容1.已知系统(1)判断系统稳定性,说明原因。
(2)若不稳定,进行极点配置,期望极点:-1,-2,-3,求出状态反馈矩阵k。
(3)讨论状态反馈与输出反馈的关系,说明状态反馈为何能进行极点配置?(4)使用状态反馈进行零极点配置的前提条件是什么?1.(1)(2)代码:a=[-2 -1 1;1 0 1;-1 0 1];b=[1,1,1]';p=[-1,-2,-3]';K=acker(a,b,p)K =-1 2 4(3)讨论状态反馈与输出反馈的关系, 说明状态反馈为何能进行极点配置?在经典控制理论中,一般只考虑由系统的输出变量来构成反馈律,即输出反馈。
在现代控制理论的状态空间分析方法中,多考虑采用状态变量来构成反馈律,即状态反馈。
从状态空间模型输出方程可以看出,输出反馈可视为状态反馈的一个特例。
状态反馈可以提供更多的补偿信息,只要状态进行简单的计算再反馈,就可以获得优良的控制性能。
(4)使用状态反馈配置极点的前提是系统的状态是完全可控的。
2.已知系统设计全维状态观测器,使观测器的极点配置在12+j,12-j 。
(1)给出原系统的状态曲线。
(2)给出观测器的状态曲线并加以对比。
(观测器的初始状态可以任意选取)观察实验结果,思考以下问题:(1)说明反馈控制闭环期望极点和观测器极点的选取原则。

线性系统的极点配置设计研究【引言】线性系统是现代控制工程学中的基础,系统的稳定性是控制系统设计的一个核心问题。
对于一个线性系统而言,其极点配置设计是控制系统设计中非常重要的一环。
本文将对线性系统的极点配置设计进行研究,并分别从理论和实践两个方面进行分析。
【理论分析】(一)极点概念的介绍在控制系统设计中,极点是非常重要的概念。
在数学上,一个线性系统的极点是其传递函数分母的根,通常将其表示为 s1, s2, ..., sn。
一个线性系统的稳定性与其极点有着密切的关系,当且仅当极点全部位于左半s平面才能保证系统的稳定性。
(二)极点配置设计的方法对于一个控制系统而言,其极点配置设计是控制系统设计的重点之一。
一般分为基于传递函数的极点配置设计和基于状态空间的极点配置设计两种。
1. 基于传递函数的极点配置设计传递函数的极点决定了一个系统的动态响应,因此,极点配置设计是控制系统设计中最重要的一步。
其中,将极点移动到左半s平面可以提高系统的稳定性,将极点分配到希望响应的位置可以改善系统的动态特性。
2. 基于状态空间的极点配置设计状态空间模型是控制系统设计中最常用的一种模型。
通过控制系统的状态变量的配置,可以决定其动态性能。
状态空间模型的主要优点是可以更好地对系统动态性能进行描述,因此,它是现代控制系统设计中非常重要的分析工具。
【实践分析】(一)极点配置设计的应用在实际的控制系统设计中,极点配置设计是不可或缺的环节。
针对不同的控制对象,合理地配置其极点可以有效地改善系统的动态性能。
下面列举几种常用的应用场景。
1. 直流电机系统对于直流电机系统而言,合理地配置极点可以显著提高系统的过渡过程与稳定性能。
通过使用极点配置工具,可以将系统的极点分布在希望的位置上,使得电机系统具有更好的响应速度和精度。
2. 液压伺服系统在液压伺服系统中,通过配置极点使得系统具有更好的质量指标和响应性能。
通过使用控制系统设计软件,可以更加精细地进行控制器的设计,从而提高系统的控制性能和稳定性。
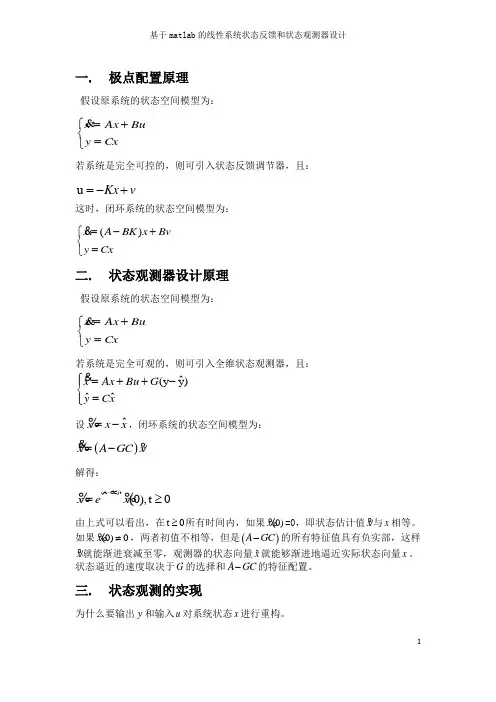
一. 极点配置原理假设原系统的状态空间模型为:⎩⎨⎧=+=Cxy Bu Ax x 若系统是完全可控的,则可引入状态反馈调节器,且:这时,闭环系统的状态空间模型为:()x A BK x Bv y Cx =-+⎧⎨=⎩二. 状态观测器设计原理假设原系统的状态空间模型为:⎩⎨⎧=+=Cxy Bu Ax x 若系统是完全可观的,则可引入全维状态观测器,且:ˆˆ(y y)ˆˆx Ax Bu G y Cx ⎧=++-⎪⎨=⎪⎩设ˆx x x=-,闭环系统的状态空间模型为: ()x A GC x =-解得:(A GC)t(0),t 0x ex -=≥由上式可以看出,在t 0≥所有时间内,如果(0)x =0,即状态估计值x 与x 相等。
如果(0)0x ≠,两者初值不相等,但是()A GC -的所有特征值具有负实部,这样x 就能渐进衰减至零,观测器的状态向量ˆx就能够渐进地逼近实际状态向量x 。
状态逼近的速度取决于G 的选择和A GC -的特征配置。
三. 状态观测的实现为什么要输出y 和输入u 对系统状态x 进行重构。
u Kx v =-+证明 输出方程对t 逐次求导,并将状态方程x Ax Bu =+代入整理,得2(n 1)(n 2)(n 3)21n n y Cxy CBu CAx y CBu CABu CA x y CBu CABu CA Bu CA x-----=⎧⎪-=⎪⎪--=⎨⎪⎪⎪----=⎩将等号左边分别用z 的各分量12,,,n z z z 表示,有121(n 1)(n 2)(n 3)2n n n y C z y CBu CA z z y CBu CABu x Qx z CA y CBu CABu CA Bu -----⎡⎤⎧⎡⎤⎡⎤⎢⎥⎪-⎢⎥⎢⎥⎢⎥⎪⎪⎢⎥⎢⎥⎢⎥==--==⎨⎢⎥⎢⎥⎢⎥⎪⎢⎥⎢⎥⎢⎥⎪⎣⎦⎣⎦⎢⎥⎪----⎩⎣⎦如果系统完全能观,则rankQ n =即1ˆ(Q Q)T Tx Q z -= (类似于最小二乘参数估计) 综上所述,构造一个新系统z ,它是以原系统的输出y 和输入u ,其输出经过变换1(Q Q)T T Q -后得到状态向量ˆx。

计算机控制系统教学模块6 基于状态空间模型的极点配置设计方法本教学模块内容:●教学单元1-模块导学●教学单元2-离散系统状态空间模型的建立●教学单元3-状态可测时按极点配置设计控制规律●教学单元4-按极点配置设计观测器●教学单元5-状态不可测时控制器的设计教学模块6 基于状态空间模型的极点配置设计方法教学单元1 模块导学东北大学·关守平guanshouping@熟悉1、s平面与z平面的映射关系2、性能指标与闭环系统零极点之间的关系掌握1、连续系统状态空间模型的基本概念2、连续系统的能控性、能观性、稳定性等基本特性1.1 学习本教学模块所需掌握的基础知识1.2 本教学模块解决的问题被控对象—离散状态空间模型性能指标—闭环系统z 平面的极点控制器设计:包括调节系统控制器和随动系统控制器设计•系统的稳定性•系统的稳态指标•系统的暂态指标1.3 极点配置设计方法原理与基本概念系统的动态行为主要是由闭环系统的极点决定的。
极点配置设计方法的基本原理:按照控制系统性能要求和被控对象的某些特征,先确定控制系统的期望闭环极点,再设计出控制器,使得控制系统的闭环极点与期望的闭环极点相同。
基于状态空间模型进行控制器的设计:可以采用状态反馈和输出反馈两种形式,其含义是分别将观测到的状态量或输出量取作反馈量以构成反馈控制律,构成闭环控制,以达到期望的闭环系统的性能指标。
采用状态反馈与采用输出反馈相比较,闭环系统能够达到更好的性能:(1)状态反馈能够实现闭环极点的任意配置;(2)输出反馈是状态反馈的特例。
状态反馈控制的前提条件:通过状态行为来实现控制目标,但是这样的反馈控制策略有一个前提,即系统状态的行为应能受控制作用的任意控制,否则不能达到设计目标。
一个系统的状态行为是否受控制作用的任意控制?这就涉及系统的能控性问题。
由于系统的状态不能全部测量,反馈的状态量需要用可直接测量的输出量进行估算,系统的状态量是否可以由输出量来完全确定?这就涉及到系统的能观性问题。