常用的DSP芯片及外围电路
- 格式:doc
- 大小:40.50 KB
- 文档页数:4

TMS320C5402与TLC320AD50C的接口设计芯片接口设计是一种基于芯片的设备及其电路的连接方式。
在芯片接
口设计中,相关接口被设计成标准的接口,使其可以被多种不同的芯片所
使用。
TMS320C5402与TLC320AD50C是一种典型的芯片接口。
TMS320C5402是一款高性能的DSP芯片,它拥有32位元的指令体系
结构,能够提供强大的计算能力和高效的运算速度。
TMS320C5402具有可
编程的芯片外围电路,可以根据用户的需求进行定制以满足特定应用场景
的要求。
另外,TMS320C5402也提供多种接口,如分立元件接口
(Discrete I/O interface)、RJ45接口(RJ45 interface) 、串口接口(Serial Interface) 、总线接口(Bus Interface)等。
TLC320AD50C是一款高性能的数字音频处理IC。
其内部具有2路数字
音频处理器,各路数字音频处理能力可以达到32位96KHZ的水平,可以
满足用户对数字音频处理高要求的应用。
此外,TLC320AD50C既具有多种
主要32位、24位、16位的数据接口,如I2S、I2C、I2L、SPI等,也具
有可选的数字接口,如TDM、S/PDIF、EIAJ、SCMS等。
因此,为了使TMS320C5402与TLC320AD50C之间的接口更加简洁高效,我们可以采用I2C接口设计。
I2C接口也被称为串行总线接口,是一种可
以在多个芯片之间传递信息的串行接口,具有高带宽、低成本、低电压电
平等特点,适用于多种多台设备的集成。
首先。
第1章芯片结构及性能概述TMS320C2000系列是美国TI公司推出的最佳测控应用的定点DSP芯片,其主流产品分为四个系列:C20x、C24x、C27x和C28x。
C20x可用于通信设备、数字相机、嵌入式家电设备等;C24x主要用于数字马达控制、电机控制、工业自动化、电力转换系统等。
近年来,TI公司又推出了具有更高性能的改进型C27x和C28x系列芯片,进一步增强了芯片的接口能力和嵌入功能,从而拓宽了数字信号处理器的应用领域。
TMS320C28x系列是TI公司最新推出的DSP芯片,是目前国际市场上最先进、功能最强大的32位定点DSP芯片。
它既具有数字信号处理能力,又具有强大的事件管理能力和嵌入式控制功能,特别适用于有大批量数据处理的测控场合,如工业自动化控制、电力电子技术应用、智能化仪器仪表及电机、马达伺服控制系统等。
本章将介绍TMS320C28x系列芯片的结构、性能及特点,并给出该系列芯片的引脚分布及引脚功能。
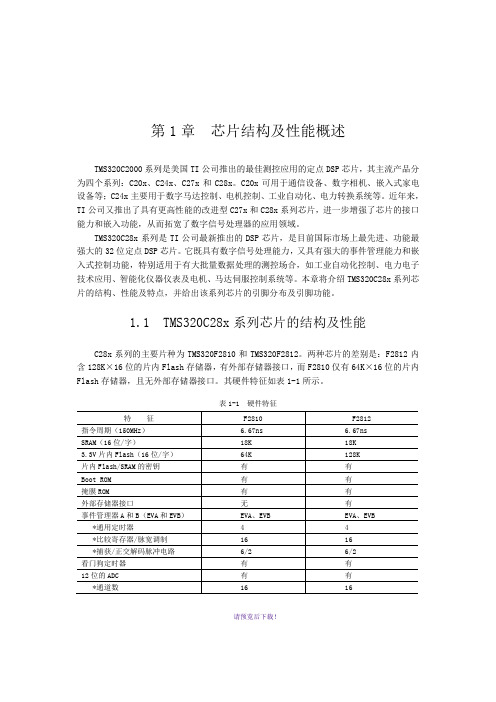
1.1 TMS320C28x系列芯片的结构及性能C28x系列的主要片种为TMS320F2810和TMS320F2812。
两种芯片的差别是:F2812内含128K×16位的片内Flash存储器,有外部存储器接口,而F2810仅有64K×16位的片内Flash存储器,且无外部存储器接口。
其硬件特征如表1-1所示。
表1-1 硬件特征请预览后下载!注:‡“S”是温度选择(-40℃ ~ +125℃)的特征化数据,仅对TMS是适用的。
‡‡产品预览(PP):在开发阶段的形成和设计中与产品有关的信息,特征数据和其他规格是设计的目标。
TI保留了正确的东西,更换或者终止了一些没有注意到的产品。
高级信息(AI):在开发阶段的取样和试制中与新产品有关的信息,特征数据和其他规格用以改变那些没有注意到的东西。
产品数据(PD):是当前公布的数据信息,产品遵守TI的每项标准保修规格,但产品加工不包括对所有参数的测试。

DSP 芯片介绍1 什么是DSP 芯片DSP 芯片,也称数字信号处理器,是一种具有特殊结构的微处理器。
DSP芯片的内部采用程序和数据分开的哈佛结构,具有专门的硬件乘法器,广泛采用流水线操作,提供特殊的DSP 指令,可以用来快速地实现各种数字信号处理算法。
根据数字信号处理的要求,DSP芯片一般具有如下的一些主要特点:(1)在一个指令周期内可完成一次乘法和一次加法。
(2)程序和数据空间分开,可以同时访问指令和数据。
(3)片内具有快速RAM,通常可通过独立的数据总线在两块中同时访问。
(4)具有低开销或无开销循环及跳转的硬件支持。
(5)快速的中断处理和硬件I/O支持。
(6)具有在单周期内操作的多个硬件地址产生器。
(7)可以并行执行多个操作。
(8)支持流水线操作,使取指、译码和执行等操作可以重叠执行。
与通用微处理器相比,DSP芯片的其他通用功能相对较弱些。
2 DSP芯片的发展世界上第一个单片DSP 芯片是1978年AMI 公司宣布的S2811,1979年美国Iintel 公司发布的商用可编程期间2920是DSP 芯片的一个主要里程碑。
这两种芯片内部都没有现代DSP 芯片所必须的单周期芯片。
1980年。
日本NEC 公司推出的μPD7720是第一个具有乘法器的商用DSP 芯片。
第一个采用CMOS 工艺生产浮点DSP 芯片的是日本的Hitachi 公司,它于1982年推出了浮点DSP 芯片。
1983年,日本的Fujitsu 公司推出的MB8764,其指令周期为120ns ,且具有双内部总线,从而处理的吞吐量发生了一个大的飞跃。
而第一个高性能的浮点DSP 芯片应是AT&T公司于1984年推出的DSP32。
在这么多的DSP 芯片种类中,最成功的是美国德克萨斯仪器公司(Texas Instruments,简称TI)的一系列产品。
TI公司灾982年成功推出启迪一代DSP 芯片TMS32010及其系列产品TMS32011、TMS32C10/C14/C15/C16/C17等,之后相继推出了第二代DSP 芯片TMS32020、TMS320C25/C26/C28,第三代DSP 芯片TMS32C30/C31/C32,第四代DSP 芯片TMS32C40/C44,第五代DSP 芯片TMS32C50/C51/C52/C53以及集多个DSP 于一体的高性能DSP 芯片TMS32C80/C82等。

第2章TMS320C6000 DSP芯片概述本章介绍了TI公司是DSP芯片和DSP芯片的命名规则,并着重介绍了TMS320DM642的器件特性及总体原理框图。
本章的知识要点为理解TMS320DM642的原理框图构成,本章建议安排2个课时进行学习。
DSP芯片概述随着信息技术的高速发展,数字信号处理器(Digital Signal Processor,DSP)的应用范围越来越广,普及率越来越高。
DSP的应用领域主要包括:图形图像领域(如图形变换、图像压缩、图像传输、图像增强、图像识别等)、自动化控制领域(如导航和定位、振动分析、磁盘驱动、激光打印、机器人控制等)、消费电力领域(如智能玩具、扫描仪、机顶盒、VCD/DVD、可视电话、传真机等)、电子通信领域(如蜂窝电话、IP电话、无线调制解调器、数字语音嵌入等)、语音处理领域(如语音综合、语音增强、语音识别、语音编码等)、工业应用领域(如数字控制、机器人技术、在线监控等)、仪器仪表领域(如数字滤波器、函数发生器、瞬时分析仪、频谱分析仪、数据采集仪器等)、医疗器械领域(如诊断设备、助听器、病情监控器、心电图设备、超声设备等)、军事领域(如导弹制导、导航、雷达、保密通信等)。
因此,DSP在当今电子通信类产品中起到了不可或缺的作用。
2.1.1主要类型DSP芯片主要分为以下两大类:(1)专用DSP芯片。
这类芯片被设计和加工成独立的电路模块,只能完成功能单一的任务,它们的使用场合比较特殊,通常应用于高速信号处理环境中,如执行FFT运算、数值滤波运算、卷积运算等,专用DSP芯片通过硬件逻辑实现信号处理算法,而不是采用内部编程的方法,这种机制保证了专用DSP芯片的执行效率、提高了其运算速度,专用DSP芯片在应用中无须程序设计。
只要根据其功能设计外围电路即可。
(2)通用可编程数字信号处理器(Programmable Digital Signal Processor)。
DSP外围电路(1)JTAG 仿真接口程序的在线调试和仿真通过JTAG(Joint Test ActionGroup)标准测试接口及相应的控制器,从而不但能控制和观察系统中处理器的运行,测试每一块芯片,还可以用这个接口来下载程序。
在TMS3⒛系列DSP 中,和JTAG 测试口同时工作的还有一个分析模块。
它支持断点的设置和程序存储器、数据存储器、DMA 的访问,程序的单步运行和跟踪,以及程序的分支和外部中断的计数等。
通过结合TI 的集成开发环境COS 与JTAG 接口,可以方便地进行实时在线调试,。
(2)外部存储器扩展DSP 具有片内RAM,其中一部分用来运行程序,另外一部分可以用来存储临时数据。
为了加快硬件系统的调试速度,在调试阶段不需将程序烧写到DSP 的片上FLASH 中,而是下载到外部扩展RAM 中,因此需扩充一部分SRAM。
本系统选用CY7C1041V33 作为外部扩展RAM,如图1 所示。
叫CY7C1041V33 是Cypress 公司生产的128 KB 的静态RAM 存储器,采用CM0S 工艺,具有自动低功耗模式的功能,降低系统功耗,保证低散热量。
同时,CY7C1041V33 RAM 芯片供电电压为+3.3V,与DSP 有很好的兼容性。
图1 外部存储器扩展(3)串行通信接口电路TMS320F2812 DSP 控制器片内集成了异步串行通信接口(SCI)模块,支持DSP 与其他是用相同格式的异步外设之间的串行通信。
它的接收器和发送器是全缓冲的,每一个都有它自己单独的使能和中断标志位,两者都可以独立工作,或者在全双工的方式下同时工作。
由于上位机(PC)都带有RS-232 接口,所以可利用上位机的串行口与下位机进行RS-232 通信,进行上位机与下位机之间的数据交换。
电路采用了符合RS-232 标准的驱动芯片MAX232 进行串行通信。
MAX232 芯片功耗低,集成度高,+5V 供电,具有两个接收和发送的通道。
DSP公司各主流芯⽚⽐较(精)DSP芯⽚介绍及其选型引⾔DSP芯⽚也称数字信号处理器,是⼀种特别适合于进⾏数字信号处理运算的微处理器具,其主机应⽤是实时快速地实现各种数字信号处理算法。
根据数字信号处理的要求,DSP芯⽚⼀般具有如下主要特点:(1)在⼀个指令周期内可完成⼀次乘法和⼀次加法;(2)程序和数据空间分开,可以同时访问指令和数据;(3)⽚内具有快速RAM,通常可通过独⽴的数据总线在两块中同时访问;(4)具有低开销或⽆开销循环及跳转的硬件⽀持;(5)快速的中断处理和硬件I/O⽀持;(6)具有在单周期内操作的多个硬件地址产⽣器;(7)可以并⾏执⾏多个操作;(8)⽀持流⽔线操作,使取指、译码和执⾏等操作可以重叠执⾏。
在我们设计DSP应⽤系统时, DSP芯⽚选型是⾮常重要的⼀个环节。
在DSP系统硬件设计中只有选定了DSP芯⽚,才能进⼀步设计其外围电路及系统的其他电路。
因此说,DSP芯⽚的选择应根据应⽤系统的实际需要⽽确定,做到既能满⾜使⽤要求,⼜不浪费资源,从⽽也达到成本最⼩化的⽬的。
DSP实时系统设计和开发流程如图1所⽰。
主要DSP芯⽚⼚商及其产品德州仪器公司众所周知,美国德州仪器(Texas Instruments,TI)是世界上最知名的DSP芯⽚⽣产⼚商,其产品应⽤也最⼴泛,TI公司⽣产的TMS320系列DSP芯⽚⼴泛应⽤于各个领域。
TI公司在1982年成功推出了其第⼀代DSP芯⽚TMS32010,这是DSP应⽤历史上的⼀个⾥程碑,从此,DSP芯⽚开始得到真正的⼴泛应⽤。
由于TMS320系列DSP芯⽚具有价格低廉、简单易⽤、功能强⼤等特点,所以逐渐成为⽬前最有影响、最为成功的DSP系列处理器。
⽬前,TI公司在市场上主要有三⼤系列产品:(1)⾯向数字控制、运动控制的TMS320C2000系列,主要包括TMS320C24x/F24x、TMS320LC240x/LF240x、TMS320C24xA/LF240xA、TMS320C28xx等。
DSP-起始篇数字信号处理(Digital Signal Processing,简称DSP)是一门涉及许多学科而又广泛应用于许多领域的新兴学科。
20世纪60年代以来,随着计算机和信息技术的飞速发展,数字信号处理技术应运而生并得到迅速的发展。
在过去的二十多年时间里,数字信号处理已经在通信等领域得到极为广泛的应用。
数字信号处理是利用计算机或专用处理设备,以数字形式对信号进行采集、变换、滤波、估值、增强、压缩、识别等处理,以得到符合人们需要的信号形式。
数字信号处理是围绕着数字信号处理的理论、实现和应用等几个方面发展起来的。
数字信号处理在理论上的发展推动了数字信号处理应用的发展。
反过来,数字信号处理的应用又促进了数字信号处理理论的提高。
而数字信号处理的实现则是理论和应用之间的桥梁。
数字信号处理是以众多学科为理论基础的,它所涉及的范围极其广泛。
例如,在数学领域,微积分、概率统计、随机过程、数值分析等都是数字信号处理的基本工具,与网络理论、信号与系统、控制论、通信理论、故障诊断等也密切相关。
近来新兴的一些学科,如人工智能、模式识别、神经网络等,都与数字信号处理密不可分。
可以说,数字信号处理是把许多经典的理论体系作为自己的理论基础,同时又使自己成为一系列新兴学科的理论基础。
世界上第一个单片DSP 芯片应当是1978年AMI公司发布的S2811,1979年美国Intel公司发布的商用可编程器件2920是DSP芯片的一个主要里程碑。
这两种芯片内部都没有现代DSP芯片所必须有的单周期乘法器。
1980 年,日本NEC 公司推出的μP D7720是第一个具有乘法器的商用DSP 芯片。
在这之后,最成功的DSP 芯片当数美国德州仪器公司(Texas Instruments,简称TI)的一系列产品。
TI 公司在1982年成功推出其第一代DSP 芯片TMS32010及其系列产品TMS32011、TMS320C10/C1 4/C15/C16/C17等,之后相继推出了第二代DSP芯片TMS32020、TMS320C25/C26/C28,第三代DSP 芯片TMS320C30/C31/C32,第四代DSP芯片TMS320C40/C44,第五代DSP 芯片TMS320C5X/C54 X,第二代DSP芯片的改进型TMS320C2XX,集多片DSP芯片于一体的高性能DSP芯片TMS320C8X 以及目前速度最快的第六代DSP芯片TMS320C62X/C67X等。
DSP芯片概述DSP芯片(Digital Signal Processor)是一种专门用于数字信号处理的集成电路芯片。
它以高效的处理能力和灵活的设计结构成为现代通信、音频、视频以及其他数字信号处理领域的关键技术。
一、DSP芯片的基本原理DSP芯片的基本原理是通过数字信号处理算法对输入的离散时间信号进行处理和分析。
它主要由控制单元、运算单元和存储单元组成。
控制单元负责指令控制和程序执行,运算单元负责高速数字信号处理运算,而存储单元则用于存储数据和中间结果。
二、DSP芯片的应用领域1. 通信领域在通信领域,DSP芯片广泛应用于无线通信系统中的信号调制、解调、信号编解码、信道估计、自适应均衡等功能。
它具有高效的计算速度和低功耗的特点,可以实现实时的通信处理要求。
2. 音频领域DSP芯片在音频领域中扮演着重要的角色。
它具备处理音频信号的能力,可以实现音频的滤波、均衡、混响、压缩等功能。
无论是消费类电子产品还是专业音频设备,DSP芯片都是实现音频处理的核心部件。
3. 视频领域在视频领域,DSP芯片被广泛应用于视频编解码领域,如数字电视、高清视频播放器等。
通过使用高效的视频编解码算法,DSP芯片可以实现高清视频的解码和显示,提供出色的视觉效果。
4. 图像处理领域随着人工智能和计算机视觉技术的发展,DSP芯片在图像处理领域扮演着越来越重要的角色。
它可以实现图像的增强、分割、去噪等功能,广泛应用于图像处理软件、工业视觉、医学影像等领域。
5. 汽车电子领域在汽车电子领域,DSP芯片被广泛用于车载音响、车载视频、车载导航等系统。
它可以实现音频信号的处理、视频信号的编解码以及导航数据的计算等功能,提供车内娱乐和驾驶辅助的支持。
6. 工业控制领域在工业控制领域,DSP芯片常被用于实时控制系统。
它可以实现对工业生产过程中的信号采集、处理和控制,广泛应用于机器人控制、自动化生产线、电力系统等领域,提高工业系统的稳定性和可靠性。
本文在硬件电路设计上采用DSP芯片和外围电路构成速度捕获电路,电机驱动控制器采用微控制芯片和外围电路构成了电流采样、过流保护、压力调节等电路,利用CPLD实现无刷直流电机的转子位置信号的逻辑换相。
在软件设计上,软件以C语言和汇编语言相结合的方法实现了系统的控制。
最后提出了模糊控制调节PID参数的控制策略。
1引言
赛车刹车系统是赛车系统上具有相对独立功能的子系统,其作用是承受赛车的静态重量、动态冲击载荷以及吸收赛车刹车时的动能,实现赛车的制动与控制。
其性能的好坏直接影响到赛车的快速反应、安全制动和生存能力,进而影响赛车的整体性能。
本文设计了赛车全电防滑刹车控制器的硬件和软件,最后研究了适合于赛车刹车的控制律。
2系统硬件电路设计
本赛车刹车控制器是由防滑控制器和电机驱动控制器组成。
两个控制器都是以DSP芯片为核心。
防滑控制器主要是以滑移率为控制对象,输出给定的刹车压力,以DSP芯片为CPU,外加赛车和机轮速度信号调理电路等。
电机驱动控制器主要是调节刹车压力大小,并且控制电动机电流大小,也是以DSP芯片为CPU,再加外围电路电动机电流反馈调理电路、过流保护电路、刹车压力调理电路、四组三相全桥逆变电路等构成电机驱动控制器。
2.1DSP的最小系统
DSP的最小系统主要涉及存储器扩展、JTAG接口配置、复位电路、ADC模块的设置以及时钟电路的设计等。
1、片外存储器扩展。
片外存储器是为了弥补DSP内部RAM的不足,同时也考虑到调试过程中可以方便将程序下载到片外高速StaTIcRAM中。
外部的静态随机存储器采用CY7C1041CV33。
DSP既可以使用片内程序存储器,也可以使用片外程序存储器,这由引脚XMP刀MC决定的。
JTAG接口。
在程序需要调试时,程序下载是通过JTAG接口完成的,这个接口经过仿真器与PC机的并行口相连。
2、复位电路与时钟源模块。
用阻容电路产生上电复位和手动复位的低电平复位电路,产生复位信号。
外加一个硬件看门狗,其输出端产生复位信号WDRST。
电源芯片的两个输入都为+5V,输出为+1.9V和+3.3V电源为DSP供电,输出电源分别有两个复位信号,当电源不稳或过低时,将产生复位信号。
3、模数转换ADC模块的硬件配置。
模数转换ADC输出电压2V,要求输出端接一个低的ESR容量为10μF的陶瓷电容到模拟地。
如果软件设置在外部参考模式下,ADCREFP能够接外部输入为2V的参考电压,并且接一个低的ESR容量为1μF到10μF的电容。
否则,AD的内部参考源的精度将受到影响。
2.2赛车前轮与刹车机轮速度信号处理电路
赛车防滑控制器主要是以滑移率为控制对象,防止赛车打滑,由滑移率的偏差大小调节后输出压力参考值,以跟踪给定的滑移率大小。
防滑控制器上必须有赛车前轮和刹车机轮速度信号的调理电路,主要是为了得到反馈的滑移率。
赛车速度信号是以自由滚动的赛车前轮速度信号代替。
在赛车的前轮与刹车机轮上都装有测速传感器,当轮子转动时,测速传感器会产生正弦波形式的交流信号,
机轮每转动一圈,测速传感器发出50个周期的正弦交流信号。
正弦交流信号的振幅随轮子速度的变化而变化,其信号为偏压2.5V,峰值为0.3V,最大信号幅值不超过5V的正弦波信号。
将此正弦波信号转换成同频率的方波后送入DSP的捕获单元,捕获方波相邻上升沿的计数值间隔ncapture,即可计算得到轮子的转速值V。
由于CPUCLK为150MHz,捕获时基为其中的一个定时器,n为CPUCLK
的分频系数,凡为轮子的滚动半径,那么轮子速度的计算式为:
调理电路如图1所示:
2.3逻辑信号电路
电机驱动器选用ALTERA公司的MAX7000A系列器件对电机的转子位置等信号进行逻辑处理,选用多达有76路可编程I/0口和100引脚的EPM7128AE,该CPLD能够满足系统设计要求。
器件EPM7128AE 实现了电机的三相全桥逆变电路触发信号、过流保护、正反转、三相全桥的开通与关断等功能。
一片CPLD器件EPM7128AE上有两个电机的逻辑信号。
由于无刷直流电动机的霍尔位置传感器
CS3020的输出是集电极开路结构,故上拉2KΩ电阻,再把霍尔信号SA,SB,SC送到CPLD的输入端口。
其JTAG接口的TMS,TCK,TDI,TDO四个端子必须接上拉电阻,再接+5V电源。
2.4无刷直流电动机的功率驱动电路
无刷直流电动机的功率驱动电路采用以IR公司的专用驱动芯片IR2130为中心的6个N沟道的MOSFET管组成的三相全桥逆变电路。
其输入为以功率地为地的PWM波,送到IR2130的输入端口,输出控制N沟道的功率驱动管MOSFET,由此驱动无刷直流电动机。
采用这种驱动方式主要是功率驱动芯片IR2130对"自举"技术形成悬浮的高压侧电源的巧妙运用,简化了整个驱动电路的设计,
提高了系统的可靠性。
而且IR2130驱动芯片内置死区电路,以及过流保护和欠压保护等功能,大大降低了电路设计的复杂度,进一步提高了系统的可靠性。
2.5电流采样及过流保护电路
无刷直流电动机的电流是通过功率驱动电路母线上的电阻进行检测的。
母线上面的电阻是由两个0.01Ω的功率电阻并联,采样电路是通过这两个并联的采样电阻进行电流采样的,采样电阻将电流信号转换为电压信号,电压信号送到电流监控芯片进行放大,然后经过由OPA2344构成二阶有源滤波电路滤波,最后得电流反馈信号,直接送到A/D转换器。
硬件过流保护电路,对系统的正常工作起到很重要的作用,主要是对功率器件MOSFET和电动机的
保护。
系统还带有软件保护功能,过流信号OVCURX送到DSP的输入引脚,当OVCUR为高电平时,DSP 会产生电机控制转动信号ENABLE关断逻辑信号,使电机停转。
芯片IR2130自身带有过流保护功能。
2.6压力信号放大电路及其调理电路
压力信号放大器采用差分式实现的减法运算的放大电路,以超低漂移电压运算放大器为核心,放大倍数为40倍,放大器还配有调零位和灵敏度调节的功能。
其中芯片7809为电源芯片7660提供+9V 电压的,芯片7660将+9V的电压变为-9V,这两个电压+9V和-9V同时为OP07供电。
由于从电压信号放大器出来的电压信号范围为+1V~+5V,而DSP的A/D模块的参考电压为+3.3V,则采样的电压信号的最大值不能超过+3.3V。
因此电压信号要经过调理电路将电压信号减小到+3.3v 以下。
调理电路采用精密的运算放大器OPA2344,将电压信号由+1V~+5V调理到+3V以下,需要设定放大倍数为0.6,以便于DSP进行采样。
3控制器软件设计
本赛车刹车控制器的软件以C语言为主体,适当的采用汇编语言,这样的软件编写给整个系统软件带来了方便。
C语言使DSP程序的开发速度加快,而且可读性和可移植性也大大增加,在TI公司的C2000CodeComposerStudio(CCS)集成开发环境下进行程序调试。
由于篇幅限制,此处仅介绍系统程序初始化以及主程序流程。
1、系统程序初始化。
系统的程序在运行前,必须对DSP的时钟源、定时器、看门狗、AD模块、I/O口、捕获单元、中断等等进行初始化设置,使系统的内部资源、外围设备和硬件电路相匹配。
系统在运行前,必须关掉所有的中断,以防止程序运行时产生不必要的中断或者程序跑飞等现象。
因此在初始化后,系统才启动中断,使程序正常运行。
2、系统主程序流程。
赛车全电刹车系统的主程序包括程序初始化模块、定时器中断服务、模拟量定时采样模块、速度信号的捕获模块、滑移率控制模块、压力调节模块、电流调节模块等等。
其中,定时器中断服务程序给电流、压力、滑移率模块提供固定的时钟触发,以此时间作为各个模块的调节基准。
当程序运行时,首先关断系统的总中断,完成初始化,接收到刹车命令后,开启总中断,进入程序调节的死循环,直到程序运行结束。
电流环调节的时间最短,反映最快,其调节时间长短与电流信号滤波参数、DSP采样速度、CPU时钟周期、软件滤波程序等都有关系,一般时间为零点几个毫秒。
而压力调节环的时间设定为电流调节环的N倍,电流调节环和压力调节环的调节次数可以现场测定调节时间而确定,滑移率调节时间更长。
系统的主程序流程图如图3所示。
4系统模糊控制策略
模糊控制器是模糊控制在控制系统中应用的关键部分,其主要过程为将取到的系统控制回路中被控过程输出的精确量进行模糊化,并且作为模糊控制器的输入。
模糊控制器的输入和输出都是实际的精确量。
然后进行模糊推理,在内部建立语言型的模糊控制规则,由输入条件判断模糊输出。
最后将模糊量转化为实际的精确量,即去模糊化。
模糊控制器设计的具体过程如下图4所示。
本文作者创新点
本文主要完成了赛车刹车控制系统的设计,主要是硬件设计、软件设计和控制策略研究。
硬件设计方面采用高速的DSP芯片和CPLD并设计其外围的电路。
系统还设计了以IR2130为核心的驱动电
路,电流信号硬件放大电路、滤波电路和保护电路,压力信号的放大电路和滤波电路,赛车速度和机轮速度的处理电路等等。
控制策略方面采用模糊控制调节PID参数。