机器人夹具干涉说明
- 格式:pdf
- 大小:1.58 MB
- 文档页数:21
干涉定义:两个或多个事物在时间轴上和空间轴上有重叠,即在某个时间内会同时到达同一区域实际可以减少的干涉区:工艺分配上要减少空间轴的重叠;实际存在但运行可以错开的干涉区:焊点点序定义时要减少时间轴的重叠,这个意义的干涉区要求研究干涉信号编制方法1、确定机器人工作顺序2、确定彼此的所有干涉区3、确定个机器人达到各干涉区的时间4、使用PROJECT以项目的形式将两机器人任务确定,并包含任务先后关系5、从时间轴上对比到达干涉区的先后顺序,先到先进干涉区6、因为任何一者先完成也没有意义,所以两者任务是完全关联的,有先后关系的一、下面介绍的2个机器人的I/O干涉信号设定时非常经典的,经过日本和台设:M32是置位,M34是复位,I/O信号为M3对应I31L ROBOTSTEP1應如何設定干涉信號:M34【3】先进入的机器人进入干涉区前将干涉信号OFFSTEP2應如何設定干涉信號:M34【3】再次将干涉信号OFF,确认进入干涉区后,其他机器人不进入干 I3 wait等待I3信号,I3 ON后,才能进入干涉区STEP3應如何設定干涉信號:M32【3】离开干涉区后,必须将干涉信号ON,允许其他机器人进入干涉1R ROBOTSTEP1應如何設定干涉信號:M32【3】STEP2應如何設定干涉信號:I3 wait等待I3信号,I3 ON后,才能进入干涉区 M34【3】机器人进入干涉区后将干涉信号OFFSTEP3應如何設定干涉信號:M32【3】离开干涉区后,必须将干涉信号ON,允许其他机器人进入干涉二、根据上述1个干涉区,推广至多干涉区(各干涉区相互干涉)设:M32是置位,M34是复位,I/O信号为M3对应I31L ROBOT1R ROBOTS1:M34[3]S1:M32[3]S2:M34[3]S2:I3 waitI3 wait M34[3]干涉区1干涉区1S3:M32[3]S3:M32[3]S4:M34[3]S4:S5:M34[3]S5:I3 waitI3 wait M34[3]干涉区2干涉区2S6:M32[3]S6:M32[3]S7:M34[3]S7:S8:M34[3]S8:I3 waitI3 wait M34[3]干涉区3干涉区3S9:M32[3]S9:M32[3]三、根据上述1个干涉区,推广至多干涉区(干涉区相互独立)设:M32是置位,M34是复位,I/O信号为M3/4/5对应I3/4/51R ROBOTS1:S2:S3:S4:S5:S6:S7:S8:S9:S1:S2:S3:S4:S5:S6:S7:S8:S9:四、根据上述1个干涉区,推广至多干涉区(干涉区既有相互独立,又有相互设:M32是置位,M34是复位,I/O信号为M3/4/5对应I3/4/5S4S7S71L ROBOT1R ROBOTS1:S2:S3:S4:S5:S6:S7:S8:S9:时到达同一区域。
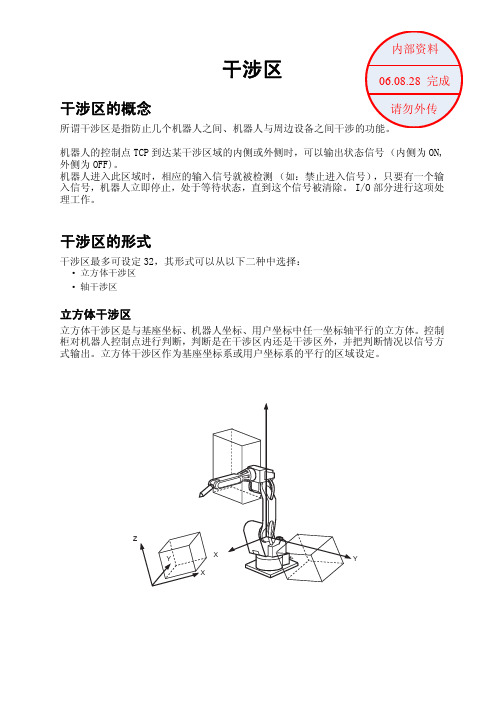
干涉区干涉区的概念机器人的控制点TCP 到达某干涉区域的内侧或外侧时,可以输出状态信号(内侧为ON,外侧为OFF)。
机器人进入此区域时,相应的输入信号就被检测(如:禁止进入信号),只要有一个输入信号,机器人立即停止,处于等待状态,直到这个信号被清除。
I/O 部分进行这项处理工作。
干涉区的形式干涉区最多可设定32,其形式可以从以下二种中选择:• 立方体干涉区• 轴干涉区立方体干涉区立方体干涉区是与基座坐标、机器人坐标、用户坐标中任一坐标轴平行的立方体。
控制柜对机器人控制点进行判断,判断是在干涉区内还是干涉区外,并把判断情况以信号方式输出。
立方体干涉区作为基座坐标系或用户坐标系的平行的区域设定。
轴干涉区轴干涉区,是指判断各轴当前位置并输出信号的功能。
设定各轴正方向、负方向各自动作区域的最大值和最小值,判断各轴当前值是在区域内侧或外侧,并将该状态作为信号输出。
(ON: 区域内, OFF: 区域外)干涉区的建立方法立方体干涉区的建立方法立方体干涉区的设定方法有以下3种:输入立方体的坐标值输入立方体坐标的最大值和最小值。
具体操作步骤参考操作要领书 10-22。
示教顶点用轴操作键把机器人移到立方体的最大/最小位置。
具体操作步骤参考操作要领书 10-25。
输入立方体边长并示教中心点输入立方体的三边边长(轴长)数值后,用轴操作键把机器人移到中心点。
具体操作步骤参考操作要领书 10-26。
轴干涉区的建立方法数值输入轴数据具体操作步骤参考操作要领书 10-27。
用轴操作键移动机器人设定轴数据具体操作步骤参考操作要领书 10-29。
干涉区的工作机理梯形图程序40090 顺序等待此信号为开时,机器人的动作暂时停止。
功能与“hold暂停”相似,但有以下两点不同。
1. 机器人在动作过程中如果此信号为开,机器人为暂时停止状态,内部保持运转状态。
移动命令(MOV)以外的命令执行时不受影响。
“启动”灯为点亮状态。
“运转中”信号为开。

SCARA系列本体使用说明书ESTUN机器人SCARA系列本体使用说明书M-0601CN-10感谢您使用埃斯顿机器人产品。
在使用机器人之前,务必仔细阅读机器人安全使用须知,并在理解该内容的基础上使用机器人。
本公司致力于不断提升产品品质,本手册中与产品有关的规格和信息如有改动,恕不另行通知。
本手册中所有陈述、信息和建议均已经过慎重处理,但不保证完全正确。
本公司对于因使用本手册而造成的直接或间接损失不负任何责任。
用户必须对其应用任何产品负全部责任,须谨慎使用本手册及产品。
本手册所有内容的解释权属南京埃斯顿机器人工程有限公司。
本手册未对任何一方授权许可,不得以任何方式复制和拷贝其中的全部或部分内容。
版权所有:南京埃斯顿机器人工程有限公司产品服务热线:400-025-3336地址:南京市江宁经济开发区吉印大道1888号邮编:211102电话:************公司主页:电子邮箱:***************安全使用须知请由具有资格的人员进行机器人与相关设备的安装与搬运。
另外,请务必遵守各国的相关法规与法令。
安装机器人系统或连接电缆之前,请阅读本手册与相关手册,正确地进行使用。
安全标示本手册中若出现如下标示的说明内容,用户必须仔细阅读并严格遵守。
设计与安装注意事项请由经过培训的人员进行机器人系统的设计与设置。
这里所说的经过培训的人员是指经过本公司与海外当地法人举办的引进培训及维护培训的人员,或与熟读本手册并经过培训的人员具有同等专业知识和技能的人员。
为了确保安全,请务必对机器人系统安装安全护板。
操作注意事项(1)进行机器人系统的操作前,请认真阅读安全使用须知。
如果未理解遵守事项进行机器人系统的操作,则可能会导致重伤或重大损害,非常危险。
(2)通电期间请勿进入到动作区域内。
即使看到机器人似乎停止了动作,但它可能还会进行动作,并可能造成严重的安全问题,非常危险。
(3)操作机器人系统之前,请确认安全护板内侧没有人。
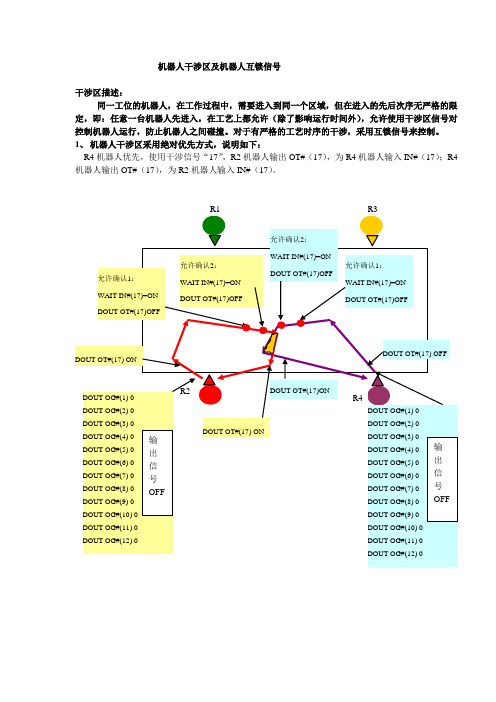
机器人干涉区及机器人互锁信号干涉区描述:同一工位的机器人,在工作过程中,需要进入到同一个区域,但在进入的先后次序无严格的限定,即:任意一台机器人先进入,在工艺上都允许(除了影响运行时间外),允许使用干涉区信号对控制机器人运行,防止机器人之间碰撞。
对于有严格的工艺时序的干涉,采用互锁信号来控制。
1、机器人干涉区采用绝对优先方式,说明如下:R4机器人优先,使用干涉信号“17”,R2机器人输出OT#(17),为R4机器人输入IN#(17);R4机器人输出OT#(17),为R2机器人输入IN#(17)。
说明:1)、关于程序结束时,干涉区信号的状态ON :程序结束后状态:R2机器人的OT#(17)ON ;R4机器人的OT#(17)ON 。
干涉区允许信号保持ON 状态;因为 如果R4的干涉信号OFF ,则必须知道R2机器人已经离开干涉区,这样机器人之间还需要更多的交互信号;如果在R2\R4都循环完成后OFF ,则可能影响机器人利用效率。
2)、2次干涉信号允许确认:防止2台机器人同时进入干涉区,既:机器人禁止另一台进入信号已经发出,但对方尚未接收到信号时刻,2台机器人存在同时进入了干涉区的可能性。
3)、在PLC 编程中,信号关系: 信号对应关系如下(仅供参考),目的说明与互锁信号的区别。
2、 不同的干涉区使用不同的干涉信号:如果两台机器人之间存在多个干涉区,则要求使用不同的干涉区信号。
3、 干涉信号地址分配:从IN/OT--9开始,机器人之间干涉区数量按照4个进行预留,即:只要使用数量不超过4个,则存在干涉区机器人,在生产线交互信号中PLC 程序中,按照4个干涉区信号进行预留编程。
干涉信号地址分配表:4工位之间的机器人、同一工位的机器人之间干涉现象,但不属于干涉区描述属性时,采用互锁信号来处理。
R2机器人与R4机器人之间的互锁:R2机器人为焊接机器人,在工作台位置进行工件焊接,R4为搬运机器人,2台机器人在工作台位置处存在干涉现;工作时序:R2机器人焊接完成后,工作台夹具打开,R4机器人才能进行搬运。

使命: 为客户提供有效的解决方案, 共创! 共赢! 共享!愿景: 创全球知名品牌, 建国际卓越企业!敢于追求创新立意高度敏锐放眼未来使命必达全力以赴团队合作不屈不挠勇于尝试敢于变革Mission: to provide customers with effective solutions and create together! Win win! Share!Vision: to create a global famous brand and build an international excellent enterprise!经营理念: 简单的事情重复做, 重复的事情用心做!Operation Concept : Repeating simple things , Repeating what you do attentively!全球销售网络分布图Global network sales location代理商Agent CULTURE CORPORATEn O rm T o l no基础框架Base Frame产品描述 :产品为一模两穴产品采用吸盘取出,料头用水口夹取出气路为两吸一夹夹具约为2.0 kgProduct Description:Two caves in one mold.Take product out with vacuum cup;Take sprue gate out with sprue gripper.Gas circuit divides into two suction and one gripping.The weight is about 2 kg.BOM 清单 BOM List清单仅含C RG 标准件 / The list contains only CRG standard parts.型材Extruded Profiles水口夹Sprue Gripper可旋转悬件双层吸盘Rotative SuspensionsVacuum Cups FGA Series十字型材连接件Cross Mounting Bracket For Profiles固定支架Mounting Bracket快换QuickBOM 清单 BOM ListBase Frame气动剪刀Air NipperSUS 钢管Sus Tube水口夹Sprue Gripper机械手固定支架Manipulator fixing bracket滑移支架Slide Bracket产品描述 :产品为一模两穴采用水口夹取料头连带产品取出夹具约为1.5 kgProduct Description:Two cavities in one mould;Taking products out and clamping the sprue by sprue gripper.The weight is about 1.5 kg.清单仅含C RG 标准件 / The list contains only CRG standard parts.Base Frame气动针夹Pneumatic Needle Gripper型材Extruded Profiles固定支架Mounting Bracket十字型材连接件Cross Mounting Bracket For ProfilesBOM 清单 BOM List产品描述 :产品为一模两穴嵌件(无纺布)采用气动针夹取出,埋入气路分为两路,一穴一路Product Description:重量:7 kgTwo cavities in one mould; Take out or embed the insert (Non-woven bafric) by pneumatic needle gripper;The gas circuit is divided into two paths; one cavity is one path.Weight: 7 kg清单仅含C RG 标准件 / The list contains only CRG standard parts.Base Frame双层吸盘Vacuum Cups FGA Series型材Extruded Profiles模具定位器Mould Positioner气动拨指Pneumatic Finger GripperBOM 清单 BOM List产品描述 :产品为一模一穴一侧取出 , 一侧埋入取出侧 : 采用吸盘 , 拨指取出气路为吸盘一路 , 拨指一路埋入侧 : 采用仿形 , 拨指取嵌件,埋嵌件气路为气缸一路 , 拨指一路 , 模具定位器一路重量:Product Description:9 kgOne cavity in one mould; Take out on one side ; embed on the other side;One side: Taken out by vacuum cup and one finger angular pneumatic gripper; The gas circuit is divided into two paths including vacuum cups and one finger angular pneumatic gripper; The other side: Profile modeling; Take out or embed by one finger angular pneumatic gripper; The gas circuit is divided into three paths including path of cylinder, path of one finger angular pneumatic gripper and path of mould positioner; Weight: 9Kg清单仅含C RG 标准件 / The list contains only CRG standard parts.Base Frame产品描述 :治具名称:仪表盘取出治具机台吨位:2700T 治具重量:25KG 料头数量:11个本产品因成型周期短,需模内完成取出+剪切动作,剪切精度要求0.3mm 以内,夹具采用无痕吸盘,夹持接触部位采用软胶垫,并使用角度可调多功能弯臂完成夹取。
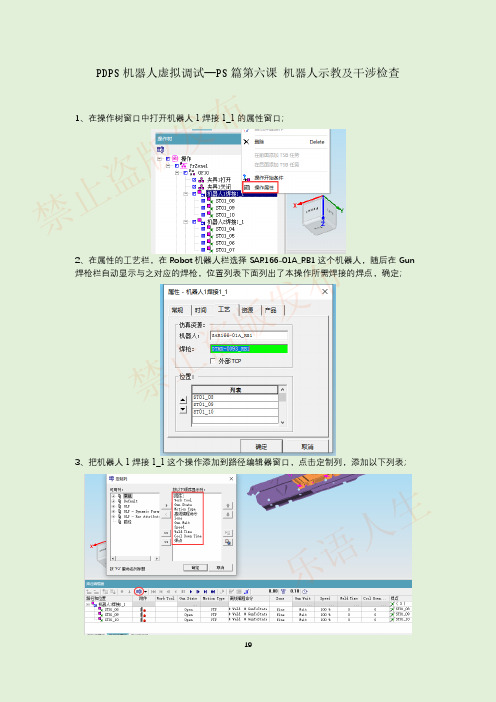
PDPS 机器人虚拟调试--PS 篇第六课 机器人示教及干涉检查1、在操作树窗口中打开机器人1焊接1_1的属性窗口;2、在属性的工艺栏,在Robot 机器人栏选择SAR166-01A_RB1这个机器人,随后在Gun焊枪栏自动显示与之对应的焊枪,位置列表下面列出了本操作所需焊接的焊点,确定;3、把机器人1焊接1_1这个操作添加到路径编辑器窗口,点击定制列,添加以下列表;禁止盗版发布禁止盗版发布乐语人生4、点击操作一栏下的添加当前位置命令;5、在机器人1焊接1_1这个操作下面新建一个点,并修改名称为Home_RB1_1作为机器人1的原点;6、选中新建的点,点击操作一栏下的操控位置命令;7、如下图所示,设置机器人的关节角度;禁止盗版发布禁止盗版发布乐语人生8、选中第一个焊点ST01_08,然后鼠标右键选择跳转指派的机器人,机器人将跳转到ST01_08焊点位置;9、若提示机器人无法到达,可打开饼图,使切入角的方向进入蓝色区域,关闭;10、从快捷工具栏上选择位置操控命令,调整机器人的姿态,避免干涉(焊点不能移动,只能转动机器人,改变机器人的姿态);禁止盗版发布禁止盗版发布乐语人生11、选中跟踪模式,然后点击位置翻转,三维视图中焊枪姿态跟着一起变化,转动Rz ,使焊枪到达合理姿态;12、点击此处,调整下一个焊点;13、如下图所示,三个焊点的姿态不一致,可通过对齐位置命令将其姿态修改一致;禁止盗版发布禁止盗版发布乐语人生14、选中右侧红圈的两个焊点ST01_09、ST01_10,然后选择对齐位置命令,打开对话框,绿色方块选择目标焊点ST01_08,确定;15、结果如下图,ST01_09、ST01_10两个焊点的姿态修改为ST01_08一致的姿态;16、下面在第一个焊点前添加过度点,选中ST01_08右键,在前面添加位置;17、如图,机器人调整窗口中将via 点沿z 负向移动20mm ,(或者通过位置操控面板调整via 点的位置);禁止盗版发布禁止盗版发布乐语人生18、重复以上步骤,添加其他的过度点,如下图所示;19、、打开干涉查看器,选择New Collision Set 新建干涉,设置干涉检查的约束条件;20、建议在Object Tree 中进行选择,向左侧添加机器人和焊枪,向右侧添加夹具组和零件;21、选择确定之后,我们得到了第一个约束条件,在前面打上对勾,使用这个约束条件进行检测,同时点击Collision Mode On\Off ,激活干涉检查模式;禁止盗版发布禁止盗版发布乐语人生22、再次运行仿真,焊枪在最后回原点的时候干涉到夹具、零件,我们需要调整焊枪的运动路径;23、同时从干涉查看器窗口也可以看出,是焊枪和夹具、零件发生了碰撞;24、重新优化路径,直至没有干涉,示教完所有的路径后,点击OP10右键设置为当前操作,然后再序列编辑器就可以看到OP10下面所有的操作按顺序链接,点击播放,查看所有示教路径,保存、完成(这里回转台作为单独的机构进行仿真运行,未将其设置为机器人的外部轴来使用,机器人外部轴的设定将在后面的章节进行讲解);禁止盗版发布禁止盗版发布乐语人生25、选中机器人焊接路径,选择机器人一栏下的扫掠体命令;26、完成后如下图所示,形成两台机器人焊接路径的扫掠体;27、选中两条扫掠体,然后右键创建干涉体;28、完成后将两条扫掠体隐藏,干涉体以红色显示,优化焊接路径,见下图;29、the end禁止盗版发布禁止盗版发布乐语人生。
功能讲堂︱多机器人导轨干涉检测近年来,随着工业自动化的快速发展,机器人在工业领域的应用越来越广泛,在搬运、装配等应用中,导轨机器人已成为了一种提高机器人使用率的方式,导轨机器人、单导轨多机器人的使用也越来越广泛。
由此也引发了多台机器人在同一导轨上工作时的安全性问题,当前常用的解决方案是多机器人之间通过空间位置、逻辑关系判断来解决,但是,这样还是不能完全解决多机器人之间可能产生的干涉问题。
针对这样的难题,FANUC开发了多机器人导轨干涉检测功能,可以很好地解决该问题。
使用本功能,机器人之间需要建立通讯联系,并调整机器人的系统设置,在已经预设好的条件下,导轨上各台机器人可根据当前实时位置来判断机器人之间是否存在干涉情况。
该功能需要添加软件(Intelligent Interference Check)。
通过机器人的示教器设置界面(Menu-SETUP-RailZone setup),可对机器人和空间进行设置:设置过程中需要判断机器人的左右位置,具体判断方式如下:在这个示意图中R3 有最高的导轨位置,即R3左侧是R2;R2左侧是R1。
而在这个示意图中R1有最高的导轨位置,即R1左侧是R2;R2左侧是R3。
设置完成后,可以通过状态栏对当前机器人的状态进行查看。
在上图中,我们可以查看当前机器人的状态、实时位置以及相邻位置机器人的位置等信息。
从而保证同一导轨上多台机器人都不会产生碰撞干涉。
通过FANUC ROBOGUIDE仿真软件,我们可以更加直观的查看机器人未干涉和干涉时的不同状态,如下图所示:未干涉时状态干涉时状态另外,将多机器人导轨干涉检测和Dual Check Safety功能结合,还有更丰富的使用方式。
通过构建机器人的末端执行器模型,也可以实现实时检测机器人末端执行器在运动过程中的状态。
机器人干涉区及互锁机器人干涉区及机器人互锁信号干涉区描述:同一工位的机器人,在工作过程中,需要进入到同一个区域,但在进入的先后次序无严格的限定,即:任意一台机器人先进入,在工艺上都允许(除了影响运行时间外),允许使用干涉区信号对控制机器人运行,防止机器人之间碰撞。
对于有严格的工艺时序的干涉,采用互锁信号来控制。
1、机器人干涉区采用绝对优先方式,说明如下:R4机器人优先,使用干涉信号“17”,R2机器人输出OT#(17),为R4机器人输入IN#(17);R4机器人输出OT#(17),为R2机器人输入IN#(17)。
说明:1)、关于程序结束时,干涉区信号的状态ON :程序结束后状态:R2机器人的OT#(17)ON ;R4机器人的OT#(17)ON 。
干涉区允许信号保持ON 状态;因为 如果R4的干涉信号OFF ,则必须知道R2机器人已经离开干涉区,这样机器人之间还需要更多的交互信号;如果在R2\R4都循环完成后OFF ,则可能影响机器人利用效率。
2)、2次干涉信号允许确认:防止2台机器人同时进入干涉区,既:机器人禁止另一台进入信号已经发出,但对方尚未接收到信号时刻,2台机器人存在同时进入了干涉区的可能性。
3)、在PLC 编程中,信号关系:信号对应关系如下(仅供参考),目的说明与互锁信号的区别。
2、不同的干涉区使用不同的干涉信号:如果两台机器人之间存在多个干涉区,则要求使用不同的干涉区信号。
3、干涉信号地址分配:从IN/OT--9开始,机器人之间干涉区数量按照4个进行预留,即:只要使用数量不超过4个,则存在干涉区机器人,在生产线交互信号中PLC程序中,按照4个干涉区信号进行预留编程。
干涉信号地址分配表:4、机器人之间的互锁:工位之间的机器人、同一工位的机器人之间干涉现象,但不属于干涉区描述属性时,采用互锁信号来处理。
R22台机器人在工作台位置处存在干涉现;工作时序:R2机器人焊接完成后,工作台夹具打开,R4机器人才能进行搬运。
C32B主线机器人I/O表与干涉区2016目录目录 (1)干涉区讲解 (1)机器人与附属设备站点划分 (5)现场硬接线信号分配表 (5)烟台宇信C32B项目信号总表 (6)UB10-1 (9)UB10-2 (11)UB20-1 (12)UB20-2 (13)UB20-3 (14)UB20-4 (15)UB30-1 (16)UB30-2 (17)UB30-3 (18)UB30-4 (19)UB40-1 (20)UB40-2 (21)UR30-1 (22)UR50-1 (23)UR50-2 (24)UR50-3 (25)UR50-4 (27)UR60-1 (29)UR60-2 (30)UR60-3 (31)UR60-4 (32)UR70-1 (33)UR70-2 (34)UR70-3 (35)UR70-4 (36)UR80-1 (37)UR80-2 (38)MB20-1 (39)MB20-3 (43)MB20-4 (44)MB20-5 (45)MB20-6 (46)MB20-7 (47)MB20-8 (48)MB20-9 (49)MB20-10 (50)MB40-1 (51)MB40-2 (52)MB40-3 (53)MB40-4 (54)MB50-1 (55)MB50-2 (56)MB60-1 (57)MB70-1 (58)MB70-2 (59)MB70-3 (61)MB70-4 (62)MB70-5 (63)MB70-6 (64)MB80-1 (65)MB80-2 (66)MR20-1 (67)MR20-2 (68)MR20-3 (69)MR20-4 (70)MR30-1 (71)MR30-2 (72)MR30-3 (73)MR30-4 (74)MR40-1 (75)MR40-2 (76)MR50-1 (77)MR50-3 (79)MR50-4 (80)MR60-1 (81)MR60-2 (82)MR60-3 (83)MR60-4 (84)MR100-1 (85)MR100-2 (86)MR100-3 (87)MR100-4 (88)MR110-1 (89)MR110-2 (90)MR110-3 (91)MR110-4 (92)MR130-1 (93)MR140-1 (94)MR140-2 (95)MR140-3 (96)MR140-4 (97)干涉区讲解干涉区:同一工位的机器人,在运行工作中,需要和另外一台或多台机器人进入同一工作空间范围内,定义为干涉区。
机器人干涉区原理一、引言机器人在现代生产中扮演着越来越重要的角色,它们能够完成繁琐、重复、危险或无法人力完成的工作。
然而,在机器人工作过程中,干涉区问题是一个不可避免的问题。
本文将详细介绍机器人干涉区的原理。
二、机器人干涉区定义机器人干涉区指的是机器人在工作时,其运动轨迹与其他物体(如固定设备、其他机器人或操作员)所在空间发生冲突的区域。
这些冲突可能会导致设备损坏、伤害操作员或影响生产效率等问题。
三、机器人干涉区的分类根据不同的分类标准,机器人干涉区可以分为以下几种类型:1. 传统干涉区:指的是机器人运动轨迹与其他物体发生碰撞或交叉的区域。
这种类型的干涉主要由于运动规划算法不当或传感器故障等原因引起。
2. 动态干涉区:指的是由于外部因素(如风、震动等)或其他运动物体(如移动平台)引起的机器人运动轨迹与其他物体发生碰撞或交叉的区域。
3. 人机干涉区:指的是机器人运动轨迹与操作员所在空间发生冲突的区域。
这种类型的干涉主要由于操作员误入机器人工作空间或机器人未能及时检测到操作员等原因引起。
四、机器人干涉区检测方法为了避免机器人干涉问题,需要对干涉区进行检测。
现有的机器人干涉区检测方法主要包括以下几种:1. 基于传感器的检测:通过安装传感器(如激光雷达、红外线传感器等)来检测机器人周围环境中的障碍物,从而避免机器人与其他物体发生碰撞。
2. 基于模型的检测:通过建立机器人和周围环境的三维模型,利用计算机仿真技术来预测机器人运动轨迹,从而避免与其他物体发生冲突。
3. 基于规划算法的检测:通过优化运动规划算法,使得机器人在工作过程中不会与其他物体发生碰撞或交叉。
四、机器人干涉区解决方法当机器人发生干涉问题时,需要采取相应的解决方法。
现有的机器人干涉区解决方法主要包括以下几种:1. 停止机器人运动:当机器人检测到干涉区时,立即停止运动,以避免与其他物体发生碰撞。
2. 路径规划调整:通过重新规划机器人的运动轨迹,使得其能够避开干涉区。