基于RecurDyn和Simulink的电传动车辆转矩控制策略
- 格式:pdf
- 大小:584.99 KB
- 文档页数:5
195电力电子Power Electronic电子技术与软件工程Electronic Technology & Software Engineering●基金项目:国防科技创新工程项目;项目编号:12050005。
1 引言混合动力电驱动履带车辆由于其采用了发动机-发电机组、动力电池和超级电容供电,具备良好的机动性能、静音行驶能力、灵活的空间布置以及较低的燃油消耗等优势,同时可以为电磁炮、激光武器、电装甲等新型装备的应用提供可靠的用电保障,逐渐成为了未来履带车辆的重要研究发展方向[1-2]。
为满足车辆转向、爬坡以及高速行驶需求,履带车辆双侧独立电驱动方案对驱动电机的功率密度、峰值扭矩和调速范围具有较高的要求[3],为降低驱动电机的设计难度,本文提出了一种新型的分布式电驱动履带车辆结构方案,该方案采用主动轮和负重轮协同驱动车辆行驶。
根据车辆的性能指标对电驱动系统各部件进行了参数匹配,并对匹配结果进行了机电联合仿真校验。
2 分布式电驱动履带车辆方案设计以某型履带装甲底盘为基础,开展分布式电驱动履带车辆方案设计。
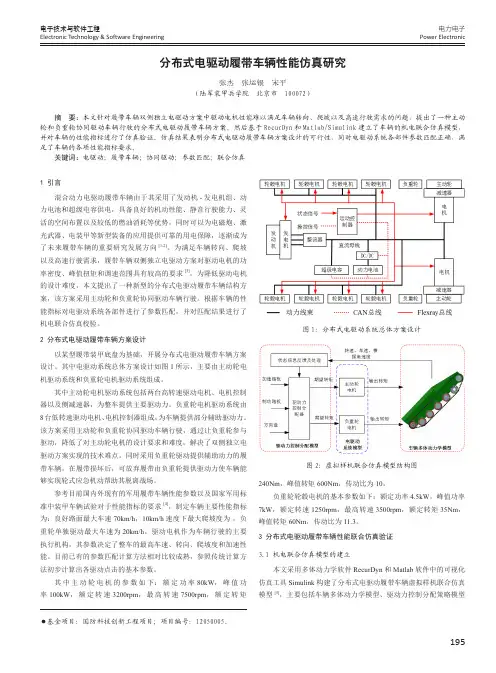
其中电驱动系统总体方案设计如图1所示,主要由主动轮电机驱动系统和负重轮电机驱动系统组成。
其中主动轮电机驱动系统包括两台高转速驱动电机、电机控制器以及侧减速器,为整车提供主要驱动力。
负重轮电机驱动系统由8台低转速驱动电机、电机控制器组成,为车辆提供部分辅助驱动力。
该方案采用主动轮和负重轮协同驱动车辆行驶,通过让负重轮参与驱动,降低了对主动轮电机的设计要求和难度,解决了双侧独立电驱动方案实现的技术难点。
同时采用负重轮驱动提供辅助动力的履带车辆,在履带损坏后,可放弃履带由负重轮提供驱动力使车辆能够实现轮式应急机动帮助其脱离战场。
参考目前国内外现有的军用履带车辆性能参数以及国家军用标准中装甲车辆试验对于性能指标的要求[4],制定车辆主要性能指标为:良好路面最大车速70km/h ,10km/h 速度下最大爬坡度为 ,负重轮单独驱动最大车速为20km/h 。

感应电机直接转矩控制的Simulink 模型摘要:直接转矩控制(DTC )是最优秀的感应电机转矩控制策略之一,被认为是磁场定向控制或矢量控制技术的替代技术。
这两种控制策略运作原理不同但目的相同,都是为了有效地控制转矩和磁通。
基于直接转矩控制(DTC )的感应电机转矩控制策略研究广泛开展并迅速发展。
该控制法的性能表现已经被通用仿真软件Matlab/Simulink 所证实。
已有多种数值模拟在快速控制模式的稳态和暂态下运行。
关键词:直接转矩控制,感应电机,矢量控制,Matlab/Simulink简介:多年来,感应电机提供着最常见的工业、商业和家庭应用的电驱动,其在本质上是以一个恒定速度控制的。
感应电机拥有比直流电机(DC motor )更简单,更稳固的结构,更高的可维护性和经济型。
他们都是稳定的,免疫重载的。
基本上,有两种类型的瞬时交流电磁转矩控制驱动被用于高性能应用,他们是: 矢量控制(VC ):基于使用PWM 逆变器控制的定子电流现场控制。
直接转矩控制(DTC ):基于使用逆变器开关直接控制的定子磁通控制。
直接转矩控制(DTC )已成为广为人知的感应电机矢量控制的一个替代控制法。
它于1984年被高桥(Takahashi )引入日本,并于1985年被Depenbrock 引入德国。
感应电机的直接转矩控制已经迅速成为矢量控制和场定位方法的最佳替代法。
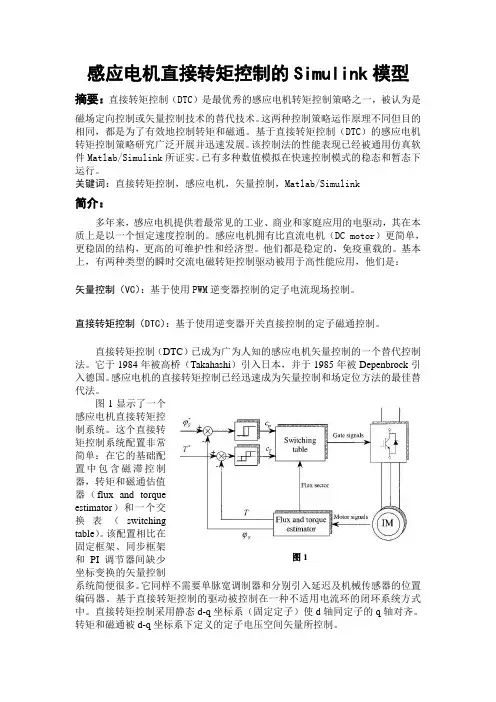
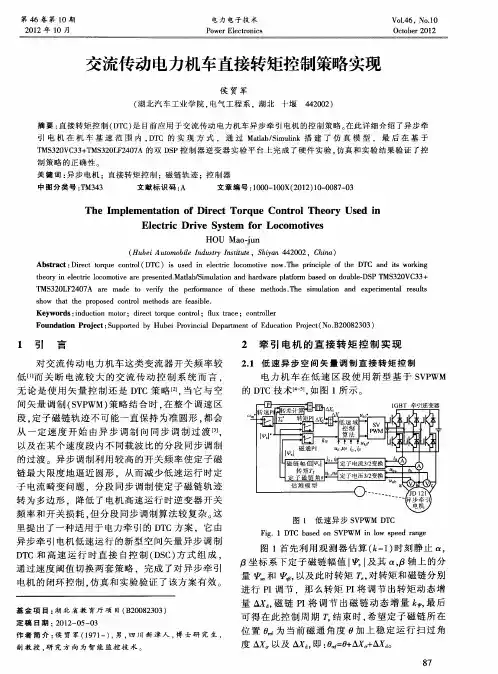
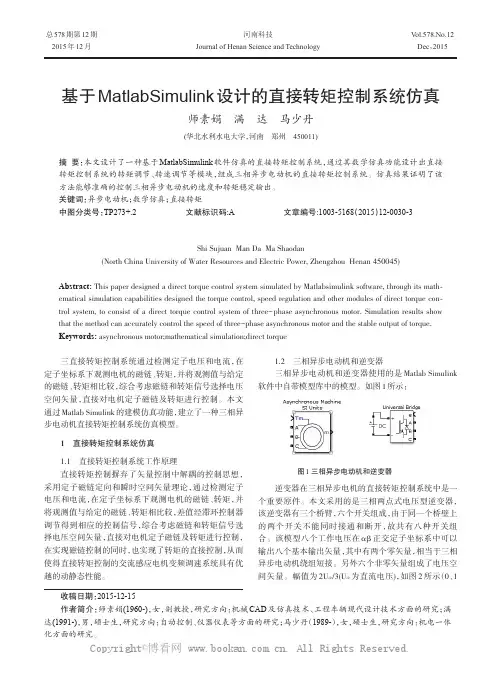
图1显示了一个感应电机直接转矩控制系统。
这个直接转矩控制系统配置非常简单:在它的基础配置中包含磁滞控制器,转矩和磁通估值器(flux and torque estimator )和一个交换表(switching table )。
该配置相比在固定框架、同步框架和PI 调节器间缺少坐标变换的矢量控制系统简便很多。
它同样不需要单脉宽调制器和分别引入延迟及机械传感器的位置编码器。
基于直接转矩控制的驱动被控制在一种不适用电流环的闭环系统方式中。
直接转矩控制采用静态d-q 坐标系(固定定子)使d 轴同定子的q 轴对齐。
修稿日期:2007-06-20作者简介:赵玉慧(1981-),女,硕士研究生.臧克茂(1932-),男,教授,研究生导师.文章编号:1009-4687(2007)03-0024-04基于M a tl ab 与Recur D yn 的电传动履带车辆的联合仿真赵玉慧, 刘春光, 臧克茂(装甲兵工程学院控制系,北京 100072)摘 要:为了建立精确的履带车辆动力学模型,实现电传动控制系统负载的动态加载,以某型履带车辆为例,分别建立了基于Matlab 的控制系统模型和基于Recur Dyn 的动力学系统模型,通过Matlab 和Recur Dyn 间的接口技术对其进行联合仿真,为履带车辆电传动系统仿真提供了新的手段,为制定比较精确的整车控制策略提供了有效的技术支持.关键词:电传动;联合仿真;Recur Dyn中图分类号:U46916+94 TP39119 文献标识码:ACo -si m ul ati on of the Electr i c Dr i ved Ar mored Vehi cle Based on Matl ab and Recur DynZHAO Yu 2hui, L I U Chun 2guang, Z ANG Ke 2mao(Depart m ent of contr olling engineering of the Acade my of A r mored Force Engineering,Beijing 100072,China )Abstract:A contr ol syste m and a dyna m ic syste m of s o me tracked vehicle are modelled based on Matlab and Recur Dyn res pectively,and the t w o models are co -si m ulated with the Recur Dyn /contr ol interface t o establish an exact dyna m ic syste m model,and l oad the contr ol syste m dyna m icly .Si m ultaneously,it p r ovides a ne w method f or the si m ulati on of the tracked vehicle electric syste m and a more effective tech 2nique support for establishing a p recise contr ol strategy .Key words:electric drive;co -si m ulati on;Recur Dyn 在现有的电传动系统仿真研究中,驱动电机负载力矩通常根据车辆行驶理论数学模型计算得到1该方法建立的车辆动力学模型精度不高,且无法实现车辆电传动控制系统负载的动态加载1多体动力学仿真软件Recur Dyn 的Track /H M 模块为解决履带车辆运动学、动力学建模提供了新的手段1本文分别采用Matlab 和Recur Dyn 建立电传动系统的控制模型和动力学模型,采用Matlab 和Recur Dyn 间的接口技术实现了负载的动态加载,从而完成了电传动车辆的联合仿真11 电驱动系统控制模型与其它电动机相比,永磁同步电动机具有可靠性好、效率和功率密度高的优点,因此在该控制系统中采用永磁同步电动机作为其驱动电机,控制方2007年第3期车辆与动力技术Vehicle &Power Technol ogy总第107期法采用最常见的矢量控制技术[1]1111 电动机数学模型分析正弦波电流控制的调速永磁同步电动机最常用的方法是dq轴数学模型1忽略电动机铁心的饱和,不计电动机中涡流和磁滞损耗且认为电动机电流为对称的三相正弦波电流1则其电磁关系可表示为[1]:u d=R i d+pψd-ωψqu q=R i q+pψq+ωψd,(1)ψd=L d i d+ψfψq =L q i q.(2)其中 Lq,L d为电机q轴、d轴电感;R为电机定子绕组电阻;iq,i d为电机q轴、d轴电流;u q, u d为电机q轴,d轴电压;ω为电机转子角速度; p为电机磁极对数1机械运动方程为:dω/d t=J(T e-T m)/p.(3)其中 J为电机转动贯量;f为电机转动摩擦系数; T m为负载转矩;T e为电机电磁力矩1112 矢量控制矢量控制实际上是对电动机定子电流矢量相位和幅值的控制1由式(1)、(2)知,电动机的力矩取决于定子电流的空间矢量is,而i s的大小和相位又取决于is 和iq,即控制i d和i q便可控制电动机的力矩1通过这两个电流的控制,使实际id 和iq跟踪指令值i3d 和i3q,从而实现电动机力矩和转速的控制1为了充分发挥电机低速时的最大力矩,当控制系统处于恒力矩调速区时采用最大力矩/电流控制,为了使电动机能恒功率运行于更高的转速,当控制系统调速范围处于恒功率调速区时采用弱磁控制1113 电传动控制系统电传动系统控制简图如图1所示:ω和θ为检测出的电动机转速和角速度空间位移1检测到的转速与指令值比较后的偏差作为速度控制器的输入1速度控制器的输出即为力矩的指令值,力矩指令值作为力矩控制器的输入,根据前述的控制策略计算定子电流分量i3d 和i3q,经过矢量逆变换后即可得到电动机三相电流的指令值,采用滞环P WM电流控制实现流跟踪,从而实现电动机的控制1图1 永磁同步电动机传动系统简图2 负载模型为了提高该控制系统动力学模型的精度,系统使用Recur Dyn软件对整车行动部分多体动力学系统进行建模1Recur Dyn软件提供了高速履带系统工具包———Track/H M,其中包括各种履带系统组件,如主动轮、诱导轮、负重轮、托带轮、高速履带等1使用这些组件可以实现对车辆行动部分的精确建模1同时,Recur Dyn软件提供了Gr ound模块,用于建立各种地面模型1211 履带车辆行动部分建模某型履带车辆模型如图2所示1图2 履带车辆模型该模型含有左右侧两条履带子系统1每条履带系统由1个主动轮、1个诱导轮、6个负重轮、3个拖带轮和82块履带板组成,主动轮前置,采用双销式履带1履带系统中的所有轮子均与车体相连1主动轮、诱导轮、拖带轮及负重轮均以一个旋转副与车体相连,可以有相对车体的运动,悬挂系统采用扭杆式独立悬挂1在该模型中整车共有1 024个自由度、47个约束1建模时选取主动轮中心为固定坐标系,履带系统则相对于车体参考系,而属于履带系统的实体则相对履带系统参考系,车体参考位置及方向在全局坐标系中定义1由于履带电传动车辆是由永磁同步电机的输出力矩通过侧传动驱动主动轮旋转,再由主动轮带动履带板卷绕运动・52・ 第3期赵玉慧等:基于Matlab与Recur Dyn的电传动履带车辆的联合仿真的,因此,只要在主动轮上加力矩或运动学驱动方式后,即可对所建模型进行仿真1212 路面模型路面谱文件的建立是采用三角形平面缝合来确定路面形状的,每个三角形单元由三个节点组成1任何形式的路面模型均可通过改变三个节点的位置来建立1地面参数在履带系统中定义,每个履带系统可以有其自己的路面和路面参数1本文采用坡度为10°的重粘土路面,路面参数如图3所示,其中剪切变形系数为:01025,路面模型见图41图3 路面参数图4 路面模型3 联合仿真模型结合当前履带车辆仿真研究的状况和军队通用规范的要求,仿真前做以下假设条件:车辆的质心和车辆的几何中心重合;负重轮与履带认为是点接触,履带接地压力被认为是沿履带中心线集中分布;不考虑履带与地面的滑转和滑移现象1利用Recur Dyn /contr ol 接口技术将整车行动部分多体系统动力学模型和基于Matlab /Si m ulink 建立的电机控制系统模型结合起来,进行机械系统和控制系统联合仿真[2],实现控制系统负载的动态加载1如图5所示,给定电机角速度指令值400rad /s ,电传动控制系统的输出转速为ω1,ω2.ω1,ω2作为履带车辆动力学系统的输入量,其输出量为负载力矩T 1,T 2,而T 1,T2则为电传动控制系统中永磁同步电动机的负载输入,由此形成一个闭环控制系统1图5 电驱动控制系统模型与履带车辆模型的联合仿真 在建立联合仿真模型之前,首先要运行履带车辆的Recur Dyn 动力学模型,以确保该模型正确1联合仿真的具体步骤如下:①在Recur Dyn /contr ol 中定义履带车辆动力学模型的输入量ω1,ω2和输出量T 1,T 2,以及连接Recur Dyn 和Matlab 的tank 1m 文件1其中:ω1=P I N (ω1),ω2=P I N (ω2),T 1=TZ (Sprocketl .M ar Ker 1,M other 2body ..M ar Ker 18),T 2=TZ (Sprocketl .M ar Ker 2,M other 2・62・车辆与动力技术2007年 body ..M ar Ker 18);②关闭RecurDyn 软件,打开Matlab /Si m u 2link ,连接已经建立的电传动控制系统模型及履带车辆动力学系统模型;③设置联合仿真参数,运行Matlab /Si m ulink,则系统自动打开Recur Dyn 软件,并调用Recur Dyn 求解器进行整个机械系统的联合仿真计算14 仿真举例及结论①根据履带车辆直线行驶动力学理论,利用牛顿第二定律微分方程分析车辆运动状态与外力关系1不计空气动力阻力,建立行驶方程式[3]:P -fG cosα-G sin α=Gx ¨/g .(4)其中 P 为牵引力;f 为摩擦系数;G 为车重;α为行驶道路的坡角1电动机负载力矩为:T m =G (f co s α+sin α)・r z /2i η.(5)其中 r z 为主动轮半径;i 为总传动比;η为电动机效率1由式(5)计算得某型履带车辆在良好水泥路面上行驶的负载力矩为103N ・m ,在10°坡面上匀速行使时负载力矩为225N ・m 1基于Recur Dyn 的动力学仿真结果如图6所示1车辆起步时,负载力矩大约为100N ・m;车辆稳定行驶时负载力矩约为97N ・m ;t =14s 时车辆爬坡,负载力矩增大,其峰值约为760N ・m ;t =17s 后,车辆完全行使于坡面,负载力矩趋于稳定,其值约为210N ・m 1由此可知,采用Recur 2Dyn 动力学分析软件仿真结果与根据车辆行驶动力学模型理论计算得到的结果一致1图6 电动机负载力矩波形图②基于Matalb 的驱动系统仿真结果如图7所示10<t <3s 时,永磁同步电机恒力矩运行,力矩值约为490N ・m ,电机转速增大;0<t <14s 时,电机弱磁运行于“恒功率区”;t =14s 电机转速达到390rad /s ,电机力矩约为95N ・m ,此时车辆开始爬坡,转速下降、力矩增大;t =17s 后,电动机转速约为320rad /s ,车辆匀速行使于坡面上,力矩值约为210N ・m 1定子电流分量i d 和i q 运行轨迹如图8所示,符合最大力矩/电流运行和弱磁运行规律1图7 电机转速及力矩波形图图8 i d 、i q 波形图综上所述,本文分别建立了基于Matlab 的履带车辆控制系统模型和基于Recur Dyn 的履带车辆动力学系统模型,采用联合仿真的方法,实现了系统负载的动态加载,大大提高了求解精确度,为履带车辆电传动系统仿真提供了新的手段,为虚拟样机设计和制定精确的整车控制策略提供有效的技术支持1参考文献:[1] 臧克茂,马晓军.装甲车辆电力传动系统及其设计[M ].北京:国防工业出版社,2004.[2] 孙逢春,陈树勇.电传动履带车辆驱动系统建模与仿真研究[M ].北京:北京理工大学出版社,2006.[3] 王德胜,杨建华.装甲车辆行驶原理[M ].北京:装甲兵工程学院,1989.・72・ 第3期赵玉慧等:基于Matlab 与Recur Dyn 的电传动履带车辆的联合仿真。
基于MatlabSimulink设计的直接转矩控制系统仿真
师素娟;满达;马少丹
【期刊名称】《河南科技》
【年(卷),期】2015(000)024
【摘要】本文设计了一种基于MatlabSimulink软件仿真的直接转矩控制系统,通过其数学仿真功能设计出直接转矩控制系统的转矩调节、转速调节等模块,组成三相异步电动机的直接转矩控制系统.仿真结果证明了该方法能够准确的控制三相异步电动机的速度和转矩稳定输出.
【总页数】3页(P30-32)
【作者】师素娟;满达;马少丹
【作者单位】华北水利水电大学,河南郑州450011;华北水利水电大学,河南郑州450011;华北水利水电大学,河南郑州450011
【正文语种】中文
【中图分类】TP273+.2
【相关文献】
1.基于智能算法的直接转矩控制系统仿真研究 [J], 辛丽;佘双翔;许志伟
2.基于圆形磁链的异步电动机直接转矩控制系统仿真 [J], 罗毅
3.基于神经网络的SRM直接转矩控制系统仿真研究 [J], 王勉华;王瑞;刘春元
4.基于SVPWM的异步发电机模糊直接转矩控制系统仿真 [J], 李岩
5.基于Saber的异步电动机直接转矩控制系统仿真 [J], 王刚
因版权原因,仅展示原文概要,查看原文内容请购买。
摘要电机调速一直是电机控制领域一个重要的研究课题,优异的调速方法可以保证电机组成的系统的稳定性和快速性,数年来经过人们的不断研究和探索,提出来许多的调速方法,比如传统的调节电枢电压,励磁电流,电压频率等调速方法,还有近些年来发展起来的矢量控制和直接转矩控制,直接转矩控制和矢量控制相比省掉了矢量旋转变换复杂的变化和计算,因此它所需要的信号处理工作特别简单,本文对永磁同步电动机的直接转矩控制进行了详细的分析研究。
直接转矩控制是在维持定子磁链恒定的前提下,通过空间电压矢量来调节定子磁链的旋转速度,从而控制转矩和转速。
本文回顾了直接转矩控制技术和永磁同步电动机的发展历史,详细的阐述了直接转矩控制的基本原理,系统的建立了永磁同步电动机在各个坐标系下的数学模型。
最后用Simulink仿真软件对理想的永磁同步电动机直接转矩控制系统进行了建模和仿真,仿真结果表明直接转矩控制应用于永磁同步电动机的可行性和这种方法控制结构简单,动态响应好的特点。
关键字:直接转矩控制,永磁同步电动机,电机调速,空间电压矢量,仿真AbstractMotor speed motor control has been an important research topic in the field , excellent way to ensure that the motor speed control system consisting of stability and fast , people over the years through continuous research and exploration, the governor proposed many methods for example, the traditional method of adjusting the speed of the armature voltage , excitation current , voltage, frequency, etc. , as well as in recent years developed vector control and direct torque control , direct torque control and vector control compared to dispense with the vector rotation transform complex changes and calculations , so it needs the signal processing is particularly simple , direct torque control of permanent magnet synchronous motor in this article for a detailed analysis. Direct torque control is maintained at a constant stator flux premise through space voltage vector to adjust the rotation speed of the stator flux , thereby controlling the torque and speed. This paper reviews the development history of direct torque control technology and permanent magnet synchronous motor , a detailed exposition of the basic principles of direct torque control system, the establishment of a permanent magnet synchronous motor mathematical model in various coordinate systems . Finally Simulink simulation software ideal for permanent magnet synchronous motor direct torque control system modeling and simulation results show that the direct torque control of permanent magnet synchronous motor used in this method is feasible and simple control structures , dynamic response good features.Keywords: direct torque control of permanent magnet synchronous motor , motor speed , space voltage vector , simulation目录1 绪论 (1)1.1直接转矩控制技术简介及其发展历史和现状 (1)1.1.1直接转矩控制技术简介 (1)1.1.2 直接转矩控制技术的发展历史和现状 (1)1.2永磁同步电动机简介及其应用领域和发展现状 (4)1.2.1引言 (4)1.2.2 永磁同步电动机简介 (4)1.2.3 永磁同步电动机的应用领域和发展现状 (5)1.3直接转矩控制在永磁同步电机控制中的应用 (6)2 永磁同步电动机基于定子x-y坐标系数学模型 (9)2.1 空间坐标系简介 (9)2.2 永磁同步电机在各个坐标系中的数学模型 (10)2.2.1永磁同步电机在三相定子坐标系(a−b−c)中模型 (10)2.2.2永磁同步电机在二相定子坐标系(α−β)中模型 (11)2.2.3 永磁同步电机在与转子同步旋转的正交参照系(d−q)中模型 (13)2.2.4 永磁同步电机在与定子磁链同步旋转的正交参照系(x−y)中模型 (14)3基于直接转矩控制的永磁同步电动机控制系统 (17)3.1直接转矩控制的工作原理 (17)3.2 永磁同步电动机直接转矩控制系统的设计 (18)3.2.1 空间电压矢量的选择 (18)3.2.2空间电压矢量对定子磁链的控制 (20)3.2.3空间电压矢量对转矩的控制 (22)3.3直接转矩控制系统的组成 (23)3.3.1两相定子坐标系下定子电流的获得 (23)3.3.2 两相定子坐标系下电压的获得 (24)3.3.3 磁链计算单元 (25)3.3.4 转矩计算单元 (25)3.3.5 磁链和转矩滞环比较单元 (25)3.3.6 开关电压矢量选择单元 (26)4 永磁同步电动机直接电动机直接转矩控制系统的仿真 (30)4.1仿真软件简介 (30)4.2 系统仿真模型的建立 (30)4.2.1 永磁同步电动机模型的建立 (30)4.2.2 逆变器模型的建立 (36)4.2.3 电压矢量开关表模型的建立 (37)4.2.4转矩比较与磁链比较环节 (39)4.2.5 整体仿真系统 (40)4.3 仿真结果 (40)4.3.1 未加负载不同给定转速下的系统响应 (40)4.3.2 负载为阶跃信号时的系统响应 (45)5 结论和展望 (47)致谢 (48)参考文献 (49)1 绪论1.1直接转矩控制技术简介及其发展历史和现状1.1.1直接转矩控制技术简介直接转矩控制(Direct Torque Control——DTC)[1],国外的原文有的也称为Direct self-control——DSC,直译为直接自控制,这种“直接自控制”的思想以转矩为中心来进行综合控制,不仅控制转矩,也用于磁链量的控制和磁链自控制[3,4]。

基于模糊控制的电动汽车动力传动系统控制摘要: 为了实现电动汽车动力传动系统的优化控制,本文利用模糊控制方法进行了研究。
对电动汽车动力传动系统进行了建模,包括电动机、电池、速度传感器等组成部分。
然后,设计了模糊控制器,并通过模糊化过程将输入变量和输出变量转化为模糊集。
根据经验规则和隶属度函数,通过解模糊过程得到最终的控制结果。
利用MATLAB/Simulink对所设计的电动汽车动力传动系统进行仿真,验证了模糊控制方法的有效性。
仿真结果表明,模糊控制方法可以有效地优化电动汽车动力传动系统的控制性能。
2. 电动汽车动力传动系统建模电动汽车动力传动系统主要由电动机、电池、速度传感器等组成。
为了进行控制研究,需要对其进行建模。
电动汽车动力传动系统的建模可分为静态建模和动态建模两个部分。
2.1 静态建模静态建模主要是对电动汽车的能量转化过程进行描述。
这包括电能和机械能之间的转化、能量损耗等。
静态建模是基于能量守恒原理进行的,可以得到电动汽车的能量传递方程。
2.2 动态建模动态建模主要是对电动汽车的运动学和动力学进行描述。
运动学描述电动汽车的速度、位置等特性,动力学描述电动汽车的加速度、力等特性。
通过动态建模可以得到电动汽车的运动方程。
3. 模糊控制器设计模糊控制器是一种基于模糊逻辑的控制方法,它可以处理模糊和不确定性信息。
模糊控制器的输入变量和输出变量都是模糊集,通过模糊化和解模糊化过程,将模糊推理转化为确定性的控制指令。
3.1 模糊化模糊化是将输入变量从实数域映射到模糊集域的过程。
输入变量可以是电动汽车的速度、加速度等。
通过设定隶属度函数和隶属度规则,将输入变量转化为模糊集。
3.2 模糊推理模糊推理是根据经验规则和隶属度函数,将模糊集进行推理,得到相应的输出变量。
经验规则是基于专家经验得到的,它描述了输入变量与输出变量之间的关系。
3.3 解模糊化解模糊化是将模糊结果转化为确定性的控制指令的过程。
解模糊化可以采用最大隶属度法、平均隶属度法等方法。
基于MATLAB SIMULINK的电传动履带车辆转向性能仿真鲁连军;孙逢春;翟丽
【期刊名称】《兵工学报》
【年(卷),期】2006(027)001
【摘要】首先采用一种简单可行的电传动方案建立了新的电传动履带车辆模型.然后在对电传动履带车辆转向行驶基本理论分析的基础上,结合鼠笼式异步电机模型及其经典矢量控制方法,分别采用独立式和差速式两种控制方案对电传动履带车辆的转向行驶性能进行了仿真分析.结果表明:采用速度控制可以很好地实现车辆转向;为使扭矩和电流平稳,参考速度应以平缓的方式给定;对不同的转向工况,应采取不同的转向模式;再生转向时产生的再生能量很大,应对其加以充分重视和利用.
【总页数】6页(P69-74)
【作者】鲁连军;孙逢春;翟丽
【作者单位】上海汽车集团股份有限公司,汽车工程研究院,上海,201206;北京理工大学,机械与车辆工程学院,北京,100081;北京理工大学,机械与车辆工程学院,北京,100081
【正文语种】中文
【中图分类】TJ811
【相关文献】
1.基于Matlab与RecurDyn的电传动履带车辆的联合仿真 [J], 赵玉慧;刘春光;臧克茂
2.基于模糊PID算法的双侧电传动履带车辆转向控制策略研究 [J], 陈泽宇;赵广耀;翟丽;周淑文
3.基于横摆角速度负反馈的电传动履带车辆原地转向控制策略 [J], 陈泽宇;赵广耀;翟丽;佟尚锷
4.基于虚拟样机技术的电传动履带车辆特殊运动性能仿真 [J], 王双双;张豫南;颜南明;赵玉慧;张亮
5.电传动履带车辆转向行驶性能仿真分析 [J], 鲁连军;孙逢春;谷中丽
因版权原因,仅展示原文概要,查看原文内容请购买。
应用Simulink电动轮车辆轮边电机输出转矩波动分析庞小兰【摘要】电动轮车辆在短距离大载重运输中应用普遍,当驾驶员指令突发大幅度变化时,电机可快速响应,但输出转矩波动较大,对系统冲击较大,针对此进行分析.根据电动轮特点,电机采用低速区转矩输出稳定矢量控制,很好实现异步电机转矩与磁链解耦,进而控制电机输出转速.基于Simulink电机矢量控制模型,搭建电传动系统模型,对不同工况电机响应及转矩波动进行分析.针对转矩波动,从控制模型入手分析影响转矩脉动的原因及应对方法.结果可知:设定转速不加负载、转速发生突变、转速缓慢增加、定负载运行等几种工况下,电机调速性能良好,响应迅速;转速发生突变时,电机对于速度响应很好,但在指令改变瞬间,电机输出转矩波动很大,且衰减很快,0.5s 左右恢复正常;通过减小脉冲发生器中误差宽度、转子磁链给定值、调整转子时间常数等可有效达到稳定转矩的目的;为进一步实车测试提供参考.%Motorized vehicle wheel is widely used in the short distance transportation under load,and when the driver command sudden large amplitude changes although the motor can fast response,but the output torque ripples is largely,which impact the system greater,the analysis is taken for the problem.According to the characteristics of the electric wheel,the motor vector control method is adopted to stabilize the output of the low speed region,which is very good to realize the decoupling of the torque and the flux of the asynchronous motor and control the output speed of the motor.The motor vector control model was built based on Simulink,and the whole model of the electric drive system was built,and the response and torque ripple of the motor under different conditions wereanalyzed.To the problem of torque fluctuation,the reasons and Countermeasures of influencing the torque ripple were analyzed based on the control model.Analysis results show that:set the speed with no load and speed mutation,speed increased slowly,fixed load operation under several operating conditions,speed regulating performance is good and response quickly;mutations in the speed,the motor for speed response is very good,but the change moment in the instruction,the output torque of the motor fluctuations and decay very fast,about 0.5 seconds to return normal;by reducing the pulse generator width error and rotor flux given value,adjustment of rotor time constant can effectively achieve the purpose of steady torque;which provide reference for further real vehicle test analysis.【期刊名称】《机械设计与制造》【年(卷),期】2017(000)005【总页数】5页(P207-211)【关键词】电动轮车辆;矢量控制;电机;输出转矩;波动;模型【作者】庞小兰【作者单位】广东理工学院,广东肇庆526114【正文语种】中文【中图分类】TH16;TM351;U463.23+3电动轮车辆结构简单、功率利用率高而被广泛应用于非公路运输,采用柴油发动机和交流电机组成动力源,通过整流逆变驱动轮边电机,整个过程灵活方便、实现无极变速等[1]。
基于Matlab与RecurDyn的电传动履带车辆的联合仿真赵玉慧;刘春光;臧克茂
【期刊名称】《车辆与动力技术》
【年(卷),期】2007(000)003
【摘要】为了建立精确的履带车辆动力学模型,实现电传动控制系统负载的动态加载,以某型履带车辆为例,分别建立了基于Matlab的控制系统模型和基于RecurDyn的动力学系统模型,通过Matlab和RecurDyn间的接口技术对其进行联合仿真,为履带车辆电传动系统仿真提供了新的手段,为制定比较精确的整车控制策略提供了有效的技术支持.
【总页数】4页(P24-27)
【作者】赵玉慧;刘春光;臧克茂
【作者单位】装甲兵工程学院控制系,北京,100072;装甲兵工程学院控制系,北京,100072;装甲兵工程学院控制系,北京,100072
【正文语种】中文
【中图分类】U469.6;TP391.9
【相关文献】
1.基于RecurDyn和MATLAB的坦克底盘-火炮系统动力学联合仿真研究 [J], 郝丙飞;王红岩;芮强;李善乐
2.基于MATLAB SIMULINK的电传动履带车辆转向性能仿真 [J], 鲁连军;孙逢春;翟丽
3.基于Matlab和Recurdyn联合仿真的主动悬架控制策略 [J], 尚涛;赵永春;赵丁
选
4.基于Simscape和RecurDyn的履带车辆动力学仿真技术研究 [J], 李明勇;靳建波;卜树峰;李永军
5.基于RecurDyn和Matlab/Simulink的一种小型轮式平台的联合仿真 [J], 张骞;李年裕;杨怀彬;崔智;房远
因版权原因,仅展示原文概要,查看原文内容请购买。
摘 要:直接转矩控制技术是一种具有优良静、动态性能的交流电机控制技术。
文章介绍了直接转矩控制技术的基本原理,并采用Matlab/Simulink 软件对直接转矩控制仿真系统进行了建立,通过对仿真系统的建立和仿真结果的分析,能为后续工作中正确建立硬件系统和编写软件应用程序具有指导意义,从而大大缩短了系统开发的时间,为下一步直接转矩控制的成功实现提供了基础。
关键词:直接转矩控制;异步电机;模型参考自适应;仿真系统中图分类号: TP391.9 文献标识码: A 文章编号:1673-1131(2010)01-043-04 一、直接转矩控制系统的基本原理直接转矩控制方法是1985年由德国鲁尔大学的Depen-brock 教授首次提出的,它是继矢量控制技术之后发展起来的一种新型交流变频调速技术。
直接转矩控制是根据给定的电磁转矩指令与交流电机的实际电磁转矩观测值相比较得到转矩误差,确定转矩的调节方向,然后根据定子磁链的大小与相位角确定选择合适的定子电压空间矢量,从而确基于Matlab/S imulink的直接转矩控制仿真系统唐湘越/大连交通大学(大连·116028)The direct torque control simulation system Based on Matlab/SimulinkAbstract: The Direct Torque Control technology is a kind of AC motor control technology which has excellent static and dynamic performance.The article introduces the basic principles of Direct Torque Control technology and set up simulation system of direct torque control using Matlab / Simulink software , through setting up the simulation system and analysising simulation results, it can set up the hardware system correctly and software applications giving the preparation of guidance, thus it reduces system development time greatly and provides the basis for implementation about direct torque control for the next step of success.Key words: Direct Torque Control; Asynchronous motor; model reference adaptive; Simulation System定三相电压源逆变器的开关状态,使交流电机的电磁转矩快速跟踪外部给定的电磁转矩指令值。