基于扭矩的汽油机控制模型开发及验证
- 格式:pdf
- 大小:395.88 KB
- 文档页数:6
基于PID控制器的扭矩-进气量map补偿方法胡云峰;郭帅;宫洵;陈虹【摘要】Mismatch between the experimental calibrated map and the actual engine system will lead to performance degradation of the output torque, as components aging or engine parameter drift. A PID controller, based on the map/physical engine model and the designed dual closed-loop controller for air-path , is proposed for compensating the intake airflow map to solve the mentioned mismatching problem such that the actual engine torque meets the torque demand. Finally, simulation results are represented to verify the validation of the PID compensation controller under the environment of four-cylinder port fuel injection gasoline engine model (enDYNA).%随着发动机使用时间的增加,元器件老化和参数漂移等因素导致发动机的特性map与发动机系统不匹配,使得发动机的扭矩输出性能下降.针对map与发动机系统不匹配的问题,本文基于map/机理混合描述的汽油发动机模型,在双闭环气路控制系统的基础上,以扭矩-进气量转换map为例,设计了PID控制器对期望的进气流量进行动态补偿,从而使得汽油机的实际输出扭矩满足期望的发动机扭矩需求.最后,利用高保真的四缸进气道喷射汽油机仿真模型(enDYNA)进行了仿真实验,仿真结果验证了基于PID控制器补偿方法的有效性.【期刊名称】《北京交通大学学报》【年(卷),期】2012(036)005【总页数】6页(P14-18,35)【关键词】PID控制器;汽油机;扭矩补偿;气路;map【作者】胡云峰;郭帅;宫洵;陈虹【作者单位】吉林大学汽车仿真与控制国家重点实验室,吉林长春130025;吉林大学控制科学与工程系,吉林长春130025;吉林大学控制科学与工程系,吉林长春130025;吉林大学控制科学与工程系,吉林长春130025;吉林大学汽车仿真与控制国家重点实验室,吉林长春130025;吉林大学控制科学与工程系,吉林长春130025【正文语种】中文【中图分类】TP273近年来,为了满足要求日益苛刻的排放法规及油耗法规,缸内直喷[1]、废气再循环[2]、可变气门正时[3]及涡轮增压[4]等新技术大量涌现.这些新技术的应用在一定程度满足了车辆节能减排的性能要求的同时,也使得发动机控制系统开发变得越来越复杂.传统的发动机控制子系统是分别调整且相互影响的,如果各子系统不能很好地协调各种互相冲突的扭矩需求,将很难让发动机达到最佳的运行状态,更谈不上节能减排、提高动力.在这种情况下,基于扭矩的发动机控制体系成为现代发动机控制的必然发展趋势[5].而且这种体系使得动力总成控制系统获得了更灵活的结构和更出色的延展集成性,使得汽车在运行过程中,能够综合考虑驾驶员和车辆运行的扭矩需求[6],并通过气路控制[7]、点火角控制及喷油控制等来实现指定的扭矩输出,从而确保发动机在各个工况下实现排放、耗油及动力性的优化,对降低尾气排放、减少能源消耗和发展低碳经济具有重要的意义.针对基于扭矩的控制策略,文献[8-9]中以4缸进气道喷射式(Port Fuel Injection,PFI)汽油发动机为被控对象,设计了包含进气流量外环跟踪控制器和节气门开度跟踪控制器的双闭环气路控制系统.通过双闭环控制,可以有效地实现进气流量和节气门开度的快速调节,从而实现驾驶员或发动机的扭矩需求.在文献[8-9]中,所研究的问题均是在外界条件、内部参数为理想情况下进行的,然而在实际使用中,如汽车所处海拔的不同、传感器漂移及零部件老化等因素都会导致标定的发动机特性map与发动机系统不匹配,使得发动机的扭矩输出等性能下降.为此,一些专家学者已经在解决map补偿和更新方面做了一些相关工作,文献[10]分别建立了扭矩估计器和扭矩控制器,分析了不同外界气压对于控制结果影响,但并没有应用适当的方法补偿参数变化对系统带来的影响.文献[11]基于扩展卡尔曼滤波(EKF)在线调整map 的方法,克服了不可避免的环境因素对控制模型带来的影响.文献[12]则考虑车速变化时的影响,运用预测控制(MPC)的方法对静态map进行了校正,优化了节气门开度与EGR开度,使得发动机性能与排放获得了有效改善.本文作者在文献[9]中双闭环控制系统的基础上,考虑发动机使用过程中因部件老化和传感器漂移等原因引起的样机标定map与发动机系统不匹配,导致的发动机扭矩输出性能变差等问题,以扭矩-进气量转换map为例,设计了相应的PID控制器对进入气缸的空气质量流量的期望值进行动态补偿,使得发动机的实际输出扭矩能够满足期望的发动机扭矩需求.1 控制方案及模型1.1 控制方案本文的研究目标是通过补偿期望的进入气缸空气流量,解决由于发动机特性map与实际发动机系统不匹配时,引起的实际输出扭矩输出性能下降的问题,从而使发动机的输出扭矩符合发动机的扭矩需求.控制方案如图1所示.图1 控制方案框图Fig.1 Control program block diagram首先根据发动机的扭矩需求及发动机转速算出期望进入气缸的空气流量,这一步由扭矩-进气量转换map来实现.外环跟踪控制器和电子节气门跟踪控制器组成的双闭环气路控制系统的作用是为了使得实际进入气缸的空气流量跟踪上期望的进入气缸的空气流量,从而实现期望的扭矩需求.但是当扭矩-进气量转换map与发动机系统不匹配,这就会导致跟踪期望的进入气缸的空气质量流量不能实现期望的扭矩需求,使得实际的发动机扭矩与期望的扭矩存在偏差,本文根据扭矩的偏差,设计PID控制器对期望的进入气缸空气质量流量进行动态补偿,通过补偿期望进气量,消除参数变化对控制系统性能的影响.由于设计控制器及仿真过程中需要用到发动机的气路模型,因此,下面对发动机的气路模型进行简单分析,主要包括通过节气门的空气质量流量模型、进入气缸的空气质量流量模型、进气歧管压力动力学模型.1.2 发动机气路模型概述通过节气门的空气质量流量模型的作用是模拟通过节气门的空气流动特性,根据发动机平均值建模机理可知,通过节气门的空气质量流量﹒m air(kg/s),可以写成表达式为式中:P r为节气门前后压强比;P a为外界大气压强,Pa 为外界大气温度,K 表示节气门开度,deg;函数 f 1(P r)、f2(θth)、f 3(T a)、f 4(P a)分别表示压强影响因子、节气门空气质量流量特性系数、温度修正因子和压强修正因子,具体表达式参见文献[9].进入气缸的空气质量流量模型的作用是模拟进入发动机气缸的空气质量流量特性,这里将发动机当作有容积的泵,则典型的空气流量计算公式为式中为进气歧管温度,K 为进气歧管内压强,Pa;N为发动机转速,r/min;R为空气质量常数,J/kg◦K;V disp为发动机总排量,m3;ηvol表示发动机容积效率,本文以map 形式表示,如图2所示.图2 发动机容积效率map图Fig.2 Engine volumetric efficiency map假设歧管内温度变化是不变,同时依据质量守恒定理,可以建立进气歧管动力学模型为以上给出了汽油发动机气路系统的简单模型,下面将依据此模型,设计双闭环气路控制系统及基于PID的扭矩-进气量转换map补偿方法.2 控制器设计本文的控制器设计主要包含气路控制系统设计和期望的进气流量补偿控制器两个部分,其中气路控制系统由外环进气流量跟踪控制器和节气门开度跟踪控制器采用文献[9]中的双闭环气路控制系统.期望的进气流量补偿控制器采用工业中最常用的PID控制器对期望的进气流量进行补偿,弥补由于汽车长期使用引起的扭矩输出性能下降问题,满足驾驶员的扭矩需求.2.1 双闭环控制器设计双闭环控制器分为进气歧管压力跟踪控制器与内环电子节气门跟踪控制.通过进气歧管压力的跟踪控制使得实际进入气缸的空气流量跟踪上期望的进入气缸的空气流量,本文中期望的进入气缸的空气流量由发动机的扭矩需求和转速共同生成的map 图查得,如图3所示.通过电子节气门的跟踪控制使得电子节气门跟踪上外环控制输出的期望电子节气门有效开度.图3 扭矩-进气量转换map图Fig.3 Torque-Air mass flow conversion map 1) 外环控制器设计.由第1.2节的发动机气路模型,整理可以得到进气歧管压力的状态方程为θth为控制输入.对式(4)进行反馈线性化,定义Lyapunov函数定性的方法,求得外环进气歧管压力控制律为式中:θstph表示节气门开度的期望值;P﹒ smp表示期望的进气歧管压力的导数.2) 内环节气门控制器设计.在保证一定精度的情况下,这里针对节气门的跟踪控制使用一个包括积分分离的PID控制器,得出电子节气门的驱动电压 u(t),从而保证对期望节气门开度θsthp的精确跟踪.控制律的计算公式如下PID控制器的控制参数;β表示积分分离PID控制器积分限制的门限值.经过多次的试验并运用频率分析法得到控制参数,在本文直接给出一组控制性0.0142,且积分分离β的门限值为12.2.2 补偿控制器设计发动机扭矩的生成主要是受进气缸空气量,点火角与点火正时,喷油量与喷油正时三者的影响.而实际发动机控制中,进气量往往是点火与喷油控制的基础,而随着发动机长期工作,无论如何做好预防与维护,发动机的性能必然下降;若在此时能够进行补偿,便可以保证发动机的工作性能.本文中,发动机扭矩管理系统对发动机的扭矩需求,是通过将期望的扭矩转化为期望的进入气缸的空气量来实现的,当扭矩-进气量转换map与发动机系统不匹配时,将导致实际的发动机输出扭矩与期望的扭矩需求产生较大偏差,使得发动机的扭矩输出性能下降.为了解决上述问题,本文利用实际发动机扭矩和期望发动机扭矩之间的偏差,通过设计PID控制器对期望的进入气缸的空气量进行补偿来改善发动机的扭矩输出性能.为了对期望的进气流量进行修正,通过PID控制器对进入气缸的空气质量流量的期望值进行动态补偿,以满足发动机扭矩的需求,PID补偿控制器的形式如下入气缸空气质量流量的补偿值;k P,k I,k D分别表示PID补偿器的控制器参数.经过多次反复的试验,得到了PID补偿控制器的一组控制性能较好的参数:k P=0.004,k I=0.0 001,k D=0.0 003.仿真过程中主要考虑了由于零部件老化带来摩擦损失扭矩变化及空气量传感器漂移导致容积效应map表失真这两种情况.3 仿真与分析本文中采用高精度的汽油发动机动力学仿真软件enDYNA对PID控制器的补偿效果进行验证.仿真模型选用enDYNA软件中一款2 L的汽油发动机,该发动机仿真模型不仅考虑了发动机的动力学特性,也考虑了传动系、悬架及车辆动力学等对其的影响,故而能够较真实地反映发动机的实际运行状态.其具体参数值为3.1 恒转速工况下仿真仿真环境设置:enDYNA仿真模型设定在测功机模式下运行,恒定发动机转速为2 000 r/min.仿真时,前3 s为使发动机启动进入稳态的过程,此间控制器并不作用,控制器仅在3 s后开始作用,故而本文的仿真曲线都是给出3 s之后的期望扭矩与实际扭矩的对比.通过加入补偿方法和未加入补偿方法的双闭环气路控制系统的仿真对比,验证本文补偿方法的有效性.1) 摩擦压力发生改变的情况.图4和图5考虑的是发动机零部件磨损导致摩擦压力分别减少和增加30%的情况,实线为阶跃形式的期望发动机扭矩需求,划线虚线表示未加入补偿的双闭环气路控制系统下的扭矩输出曲线,点线虚线为加入补偿的双闭环气路控制系统作用下的扭矩输出曲线.图4 摩擦压力减少30%Fig.4 Friction pressure reduced by 30%图5 摩擦压力增加30%Fig.5 Friction pressure increased by 30%从图4和图5仿真结果可以看出:未加入补偿的双闭环气路控制系统在摩擦压力变坏(无论增大或者减小)的情况下,稳态时发动机扭矩均出现了约5 Nm的跟踪静差,如图中圆圈标出的实线和划线虚线之间的误差,而加入补偿的双闭环控制器有效抑制了跟踪静差.2) 容积效率发生改变的情况.这里的发动机仿真环境及曲线类型设置均与上一组仿真实验相同.图6和图7考虑的分别为发动机容积效率分别减少和增加5%的情况.仿真结果见图6和图7.图6 容积效率减少5%Fig.6 Volumetric efficiency reduced by 5%图7 容积效率增加5%Fig.7 Volumetric efficiency increased by 5%从图6和图7仿真结果可以看出:未加入补偿的双闭环气路控制系统在容积效率表变坏(无论增大或者减小)的情况下,稳态时均出现了跟踪静差,并随着期望扭矩的增加,静差也越来越大,在期望为120 Nm时的稳态静差达到10 Nm,如图中圆圈标出的实线和划线虚线之间的误差,而加入进气流量补偿的双闭环控制器可以有效抑制发动机扭矩的跟踪静差.3.2 变转速工况下仿真图8 全工况下发动机转速Fig.8 Engine speed in full working conditions仿真环境设置:enDYNA仿真模型设置在驾驶模式下运行,发动机转速的变化曲线如图8所示,因为篇幅所限,这里仅给出摩擦压力增加30%的仿真曲线,如图9所示.从图9中可以看出:全工况摩擦压力增加30%的情况下,未加入补偿的双闭环气路控制系统出现约10 Nm的跟踪静差,如图9中圆圈标出的实线和划线虚线之间的误差,而加入补偿的双闭环气路控制系统的跟踪静差得到了有效抑制.图9 全工况下摩擦压力增加30%Fig.9 Friction pressure increased by 30%in full working conditions综上,无论是摩擦压力还是容积效率发生改变,加入PID补偿后的双闭环气路控制系统,都能够有效地抑制系统的稳态误差.但是阶跃的瞬间发生的超调及震荡较大,这是由于PID控制器的结构决定了其对信号偏差的震荡调节,需要进一步改进.4 结论本文首先建立了机理/map混合描述的发动机气路模型,并利用该模型,推导了双闭环气路控制系统.然后,针对因部件老化等原因引起的样机标定map与发动机系统不匹配,导致气路控制系统的控制性能变坏的问题,设计了PID控制器对期望的进入气缸的空气质量流量进行动态补偿,使得发动机的实际输出扭矩能够满足期望的发动机扭矩需求.仿真表明,加入补偿方法的双闭环气路控制系统的扭矩跟踪稳态误差明显小于未加入补偿方法的双闭环气路控制系统的稳态误差,验证了本文设计的补偿方法在稳态工况下的有效性.下一步将进行硬件在环仿真试验,进一步验证补偿方法的有效性,同时采取有效的方法提高补偿方法的瞬态性能.参考文献(References):[1]Magnus Gafvert,Karl-Erik A rzen,Lars Malcolm Pedersen.Control of GDI engines using torquefeedback exemplified by simulations[J].Control Engineering Practice,2004(12):165-180.[2]Liu B,Huang M,Yang X L,et al.An optimization of EGR control system for gasoline using fuzzy PID strategy[C]//Computer-Aided Industrial Design Conceptual Design,2010:1221-1225.[3]Leroy T,Chauvin J.Petit N motion planning for experimental airpath control of variable-valve-timing spark ignition engine[J].Control Engineering Practice,2009(17):1432-1439.[4]Leroy T,Chauvin J,Petit N.Controlling air and burned gas masses of turbocharged VVT SI engines[C]//Proceedings of the47th IEEEConferenceon Decision and Control.Cancun,2008:5628-5634.[5]Heintz N,Mews M,Stier G.An approach to torque-based engine management system[C]//SAE 2001 World Congress,Detroit,A:SAE International,2001-01-0269.[6]Chamaillard P Y,Higelin A Charlet.A simple method for robust control design,application on a non-linear and delayed system:engine torquecontrol[J].Control Engineering Practice,2004(12):417-429.[7]Satou S,Nakagawa S,Kakuya H.An accurate torquebased enginecontrol by learning correlation between torque and throttle position[C]//2008 World Congress Detroit,A:SAE International,2008,April,2008-01-1015.[8]黄贵芬,陈虹,胡云峰.基于模型和MAP图的汽油发动机控制[C]//第29届中国控制会议,北京,2010:6010-6015.HUANG Guifen,CHEN Hong,HU Yunfeng.Model and MAP-based gasoline engine airpathcontrol[C]//Proceedings of the 29th Chinese ControlConference,Beijing,2010:6010-6015.(in Chinese)[9]胡云峰,陈虹,黄贵芬.汽油发动机双闭环气路控制[J].吉林大学学报:工学版,2011,41(增 1):240-244.HU Yunfeng,CHEN Hong,HUANG Guifen.Gasline engine dual closed loop airpath control[J].Journal of Jilin U-niversity Engineering and Technology:Edition,2011,41(S1):240-244.(in Chinese) [10]Michael Livshiz,Minghui Kao,Anthony Will.Engine torque control variation analysis[C]//2008 World Congress Detroit,A:SAE International,2008-01-1016.[11]Erik Hocheral,Erik Frisk,Lars Eriksson.EKF-based adaptation of look-up tables with an air mass-flow sensor application[J].Control Engineering Practice,2011(19):442-453.[12]Scattolini R,Miotti A,Lorini G,et al.Modeling,simulation and control of an automotive gasoline engine[C]//Proceedings of 2006 IEEE International Symposium on Intelligent Control,Munich,Germany,2006:2748-2753.。

分布式驱动的扭矩控制原理随着汽车技术的飞速发展,分布式驱动系统作为一种新型的驱动方式,越来越受到业界的关注。
分布式驱动系统通过多个独立的驱动单元协调工作,实现对车辆的驱动和控制。
其中,扭矩控制是分布式驱动系统的核心技术之一。
本文将详细阐述分布式驱动的扭矩控制原理,以期为相关领域的研究和实践提供有益的参考。
一、分布式驱动系统概述分布式驱动系统是指将传统集中式驱动系统的动力源分散到各个车轮或驱动桥上,通过独立控制每个驱动单元来实现对车辆的驱动。
分布式驱动系统具有结构紧凑、重量轻、能效高、动态性能好等诸多优点,是未来汽车发展的重要方向之一。
在分布式驱动系统中,每个驱动单元都具备独立的驱动力和制动力,因此可以通过精确的扭矩控制实现车辆的行驶、转向、制动等多种功能。
扭矩控制作为分布式驱动系统的关键技术,对于提高车辆的操控性、稳定性和安全性具有重要意义。
二、扭矩控制原理扭矩控制是指通过控制驱动单元的扭矩输出,实现对车辆行驶状态的控制。
在分布式驱动系统中,扭矩控制主要包括以下几个方面:1. 驱动力分配分布式驱动系统通过独立控制每个驱动单元的扭矩输出,实现驱动力在车轮间的合理分配。
驱动力分配需要考虑车辆行驶状态、路面附着条件、车辆动力学特性等多种因素,以确保车辆在不同工况下都能获得最佳的驱动性能。
2. 扭矩协调控制在分布式驱动系统中,各个驱动单元之间需要实现扭矩的协调控制,以保证车辆行驶的稳定性和安全性。
扭矩协调控制主要包括驱动单元的扭矩跟随性、扭矩响应速度以及扭矩分配的精确性等方面。
3. 扭矩限制与保护为了确保分布式驱动系统的安全可靠运行,需要对驱动单元的扭矩输出进行限制与保护。
扭矩限制主要包括最大扭矩限制、峰值扭矩限制等,以防止驱动单元因过载而损坏。
扭矩保护则主要包括过温保护、过流保护等,以确保驱动单元在异常情况下能够及时切断扭矩输出,避免对车辆和驱动单元造成损害。
三、扭矩控制策略在分布式驱动系统中,扭矩控制策略是实现扭矩控制目标的关键。
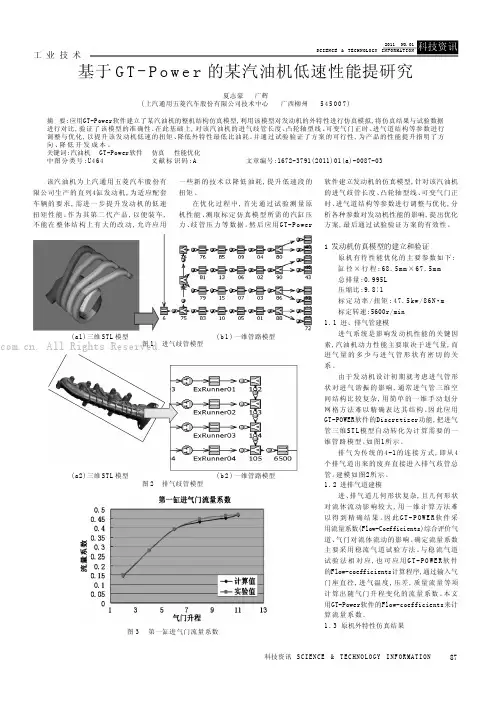
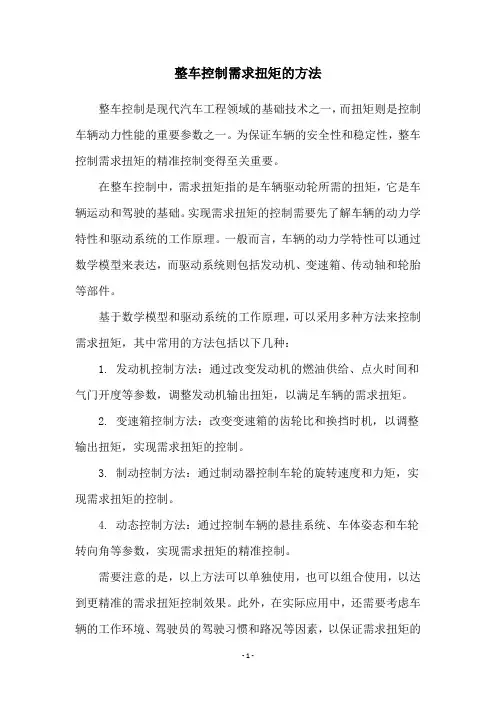
87科技资讯 S CI EN CE & T EC HNO LO GY I NF OR MA TI ON 工 业 技 术该汽油机为上汽通用五菱汽车股份有限公司生产的直列4缸发动机,为适应配套车辆的要求,需进一步提升发动机的低速扭矩性能。
作为其第二代产品,以便装车,不能在整体结构上有大的改动,允许应用一些新的技术以降低油耗,提升低速段的扭矩。
在优化过程中,首先通过试验测量原机性能、测取标定仿真模型所需的汽缸压力、歧管压力等数据。
然后应用GT-Power软件建立发动机的仿真模型,针对该汽油机的进气歧管长度、凸轮轴型线、可变气门正时、进气道结构等参数进行调整与优化,分析各种参数对发动机性能的影响,提出优化方案,最后通过试验验证方案的有效性。
1 发动机仿真模型的建立和验证原机有待性能优化的主要参数如下:缸径×行程:68.5mm ×67.5m m 总排量:0.995L 压缩比:9.8∶1标定功率/扭矩:47.5kw /86N·m 标定转速:5600r/min 1.1进、排气管建模进气系统是影响发动机性能的关键因素,汽油机动力性能主要取决于进气量,而进气量的多少与进气管形状有密切的关系。
由于发动机设计初期就考虑进气管形状对进气谐振的影响,通常进气管三维空间结构比较复杂,用简单的一维手动划分网格方法难以精确表达其结构。
因此应用GT-POWER软件的Discretizer功能,把进气管三维ST L模型自动转化为计算需要的一维管路模型。
如图1所示。
排气为传统的4-1的连接方式,即从4个排气道出来的废弃直接进入排气歧管总管。
建模如图2所示。
1.2进排气道建模进、排气道几何形状复杂,且几何形状对流体流动影响较大,用一维计算方法难以得到精确结果。
因此G T -P O W E R 软件采用流量系数(Flow-Coefficients)综合评价气道、气门对流体流动的影响。
确定流量系数主要采用稳流气道试验方法。
整车控制需求扭矩的方法
整车控制是现代汽车工程领域的基础技术之一,而扭矩则是控制车辆动力性能的重要参数之一。
为保证车辆的安全性和稳定性,整车控制需求扭矩的精准控制变得至关重要。
在整车控制中,需求扭矩指的是车辆驱动轮所需的扭矩,它是车辆运动和驾驶的基础。
实现需求扭矩的控制需要先了解车辆的动力学特性和驱动系统的工作原理。
一般而言,车辆的动力学特性可以通过数学模型来表达,而驱动系统则包括发动机、变速箱、传动轴和轮胎等部件。
基于数学模型和驱动系统的工作原理,可以采用多种方法来控制需求扭矩,其中常用的方法包括以下几种:
1. 发动机控制方法:通过改变发动机的燃油供给、点火时间和气门开度等参数,调整发动机输出扭矩,以满足车辆的需求扭矩。
2. 变速箱控制方法:改变变速箱的齿轮比和换挡时机,以调整输出扭矩,实现需求扭矩的控制。
3. 制动控制方法:通过制动器控制车轮的旋转速度和力矩,实现需求扭矩的控制。
4. 动态控制方法:通过控制车辆的悬挂系统、车体姿态和车轮转向角等参数,实现需求扭矩的精准控制。
需要注意的是,以上方法可以单独使用,也可以组合使用,以达到更精准的需求扭矩控制效果。
此外,在实际应用中,还需要考虑车辆的工作环境、驾驶员的驾驶习惯和路况等因素,以保证需求扭矩的
控制效果。
总之,整车控制需求扭矩的方法是多种多样的,但都需要基于数学模型和驱动系统的工作原理,结合实际应用中的因素,精准控制车辆的需求扭矩,以保证车辆的安全性和稳定性。

高压共轨柴油机ECU解决方案摘要:基于RapidECU的高压共轨柴油机ECU快速开发解决方案,用户可以在数周内完成高压共轨柴油机ECU原型样机开发,实现发动机起动、怠速、加减速等基本工况,在数月内完成批量产品样件开发,实现中小批量装车,为高压共轨柴油机ECU大批量产业化打下良好基础。
概述高压共轨柴油喷射系统能够实现对燃油喷射压力、喷油脉宽、喷油正时等的灵活控制,是电控柴油机满足国Ⅳ及以上排放标准的首选燃油系统,同时,高压共轨柴油机还具备显著的燃油经济性与强劲的动力性。
电控单元ECU、高压油轨、高压泵、喷油器是共轨系统的四大核心部件,其中ECU采集传感器信息,经过运算处理后,控制执行器动作,实现发动机的运行控制、故障诊断等功能,被称为发动机的大脑。
ECU主要包括控制器硬件和控制器软件,其中的控制器软件又包括基础软件与应用软件。
由于高压共轨系统的高度复杂性,无论是控制器硬件开发,还是基础软件或者应用软件开发都需要花费大量的时间、精力以及昂贵的费用。
如果没有合适的开发工具,ECU的研发和产业化几乎成了难以完成的任务。
使用RapidECU快速原型控制器可以在没有控制器硬件的情况下,提前进行控制算法的开发与验证,尤其适合于高压共轨等复杂系统ECU的开发研究,快速原型的试验结果还可以为产品硬件设计提供参考。
因此,控制器快速原型在进行软件快速验证的同时,也降低了硬件返工几率,从而缩短开发周期,降低开发成本,提高控制器设计质量。
开发流程开发流程符合国际标准的V型开发模式,基于MATLAB\Simulink\Stateflow\ECUCoder图形化建模方式建立软件工程,完全零手工的一键式全自动代码生成,可以同时完成应用软件和基础软件模型自动代码生成,在开发过程中随时保持模型和代码的同步状态。
通过下载到高性能的产品级控制器硬件平台完成实时环境下的测试和验证,使开发和产品化在统一的平台下实现,提供集成式的完整工具链组合,支持用户在ECU生命周期内的开发、测试、标定、验证、生产和售后等全部流程。
10.16638/ki.1671-7988.2020.17.034某汽油机增压器性能匹配分析与验证程剑峰,张盼,房凯,黄伟(安徽江淮汽车集团股份有限公司技术中心,安徽合肥230601)摘要:基于A VL-BOOST仿真软件,搭建某汽油机增压器仿真计算模型,文章介绍了一种汽油发动机增压器性能匹配分析的过程,最后试验结果表明,仿真计算数据与试验结果吻合良好,确定增压器性能满足设计需求。
关键词:汽油机;增压器;仿真计算中图分类号:U464.135 文献标识码:A 文章编号:1671-7988(2020)17-105-02The performance matching analysis and verification for Turbochargerof a Gasoline engineCheng Jianfeng, Zhang Pan, Fang Kai, Huang Wei( Technical Center, Anhui Jianghuai Automobile Group Co., Ltd, Anhui Hefei 230601 )Abstract: Based on the A VL-BOOST simulation software, a gasoline engine turbocharger simulation calculation model is built, and a process of matching analysis of the engine turbocharger performance is introduced. The final test results show that the simulation calculation data is in good agreement with the test results, and the turbocharger performance meet the design needs.Keywords: Gasoline engine; Turbocharger; Simulation calculationCLC NO.: U464.135 Document Code: A Article ID: 1671-7988(2020)17-105-02引言随着社会生产力和科技的不断进步,节能低耗、动力强劲的发动机进入研究范围,而增压技术是其中重要的一项课题。
基于模型的发动机仿真与优化鲁胜;吴长水;凌宪政;刘扬柏【摘要】利用Matlab软件中的MBC (model-based calibration)工具箱和仿真软件RicardoWave对汽油发动机的动力性进行了基于模型的标定和优化;在标定流程中,首先利用Wave建立了发动机仿真模型,并通过验证;接着,运用实验设计(DoE)方法确定了发动机的运行工况点,并用仿真模型计算出发动机在这些工况点处的参数和性能(扭矩、油耗、功率和缸内最高压力等);最后,建立发动机数学统计模型和标定优化;得到了发动机点火提前角、空燃比MAP图和优化后转矩的三维图;研究结果表明,该方法结合现代DoE试验设计理论和自动标定技术,不仅使发动机的扭矩从198 Nm提升到215 Nm,还能减少试验时间,提高标定效率.【期刊名称】《计算机测量与控制》【年(卷),期】2016(024)009【总页数】4页(P257-260)【关键词】基于模型的标定;试验设计;发动机;标定优化【作者】鲁胜;吴长水;凌宪政;刘扬柏【作者单位】上海工程技术大学汽车工程学院,上海 201620;上海工程技术大学汽车工程学院,上海 201620;上海工程技术大学汽车工程学院,上海 201620;上海工程技术大学汽车工程学院,上海 201620【正文语种】中文【中图分类】TP15为了满足国家法规以及人们对汽车性能的需求,发动机电控参数的优化标定显得尤为关键[1]。
但是标定任务繁重,需要标定的量已经由1998年的2个发展到目前的7到10个,需标定的MAP已由1980年的8张增多到2015年的1 000多张,预计下一代发动机将会增长到10 000到15 000张[2]。
然而,在发动机的研发过程中,大部分的专家学者是先研究发动机的电控硬件系统,再对发动机进行台架测试,然后标定优化[3],这样的流程工作量非常大而且成本很高。
本文介绍的基于模型的标定技术是一种将数学优化理论与发动机标定技术相结合而形成的离线模式下的自动标定方法,它能在很大程度上减少标定时间。
10.16638/ki.1671-7988.2017.14.047基于扭矩的发动机怠速控制研究林思聪,李钰怀,张安伟,刘巨江(广州汽车集团股份有限公司汽车工程研究院,广东广州511434)摘要:文章分析了EMS基于扭矩的控制策略,将传统PID控制方法与基于扭矩的控制策略相结合,并在一台B 级车上进行试验研究,试验结果表明所研究的怠速控制策略能取得良好的控制效果。
关键词:怠速;扭矩模型;PID;闭环控制中图分类号:U464 文献标识码:A 文章编号:1671-7988 (2017)14-134-04Reserch on Idle Control Base on TorqueLin Sicong, Li Yuhuai, Zhang Anwei, Liu Jujiang(GAC Engineering, GuangDong GuangZhou 511434)Abstrace: In this paper, the EMS torque based control strategy is presented, the traditional PID control method combines with the torque based control strategy, it was found from the test on a B class vehicle that the idle control strategy which was researched in this paper can reach good control effect.Keywords: idle; torque model; PID; closed loop controlCLC NO.: U464 Document Code: A Article ID: 1671-7988 (2017)14-134-04前言怠速工况是发动机在对外不做功的情况下,以最低稳定转速运行的状态。