一种水面漂浮物自动清理机器人结构设计
- 格式:pdf
- 大小:370.60 KB
- 文档页数:3
一种水面视觉垃圾清理机器人的结构设计摘要:本文介绍一种基于视觉的水面垃圾清理机器人以及该装置的基本结构,工作原理和工作特色。
具体阐述了该装置的设计方向,未来前景,以及对人类未来水污染处理方式的重大影响。
该装置基于摄像头的人工智能视觉算法使得垃圾清理机器人能自动发现并识别垃圾,之后通过目标追踪使小船行驶到垃圾所在位置并通过传送带,压缩装置和粉碎装置对垃圾进行收集和加工以达到清理垃圾的作用。
结果表明,该机器人适合多种复杂水域环境,具有稳定性强、作业效率高、原材料清洁环保等优点,可广泛应用于水环境治理领域。
关键词:人工智能;机器视觉;自动控制;垃圾清理船1.引言海洋因其空间广阔成为人们生活和生产的活动场所,但水面漂浮垃圾的问题也接踵而至。
偌大的江河湖海水面之上,漂浮着各种垃圾,严重影响水域环境。
为更绿色地利用水资源,各国对水面的垃圾清理也较为重视,但效果不是太理想。
【1】根据调查,目前小型水域的漂浮垃圾清理仍以人工驾驶船只打捞为主,存在效率低、成本高和劳动强度大等问题,而且小型水域经常存在水面狭窄或者深浅不一的区域,打捞具有一定的危险性。
为了克服现有技术的缺点.针对小型水域特点和现有清理装置的不足,我们团队设计一种小型水面垃圾清理装置。
【2】2.主体设计本文所设计的视觉跟踪水上垃圾清理船是由动力模块、功能模块、视觉模块、电源模块组成。
小船的工作流程为小船首先进行目标识别,即通过卡尔曼滤波将目标框处理为预测框,再通过距离代价矩阵进行匈牙利匹配,将特征值、检测框与匈牙利匹配共同作用,追踪 ids 系统,寻找目标 ids。
随后进行目标跟踪,移动小船行驶到目标地,将垃圾送入小船内部,使垃圾最后被送到储存箱。
主要结构包括两个1.5KG 推力的直流转向推进器,传送带,垃圾储存箱,摄像头探照灯组成的视觉模组,压实装置,24v 磷酸铁锂电池,电源转换器等部件。
3.结构设计本文所设计的水面视觉垃圾清理机器人装置如图1所示。
• 50•随着社会的发展进步,人们为满足自身利益的同时却往往不重视他们对环境的污染,严重影响水质甚至危害生命。
为了更加方便的进行水面垃圾清理的工作,设计了这种微型水面垃圾清理机器人,用来代替人工打捞垃圾的工作。
为了让垃圾清理船适应各种水域的工作,采用了双船体结构来增加船体的稳定性,使用远距离遥控的技术来实现对垃圾的清理。
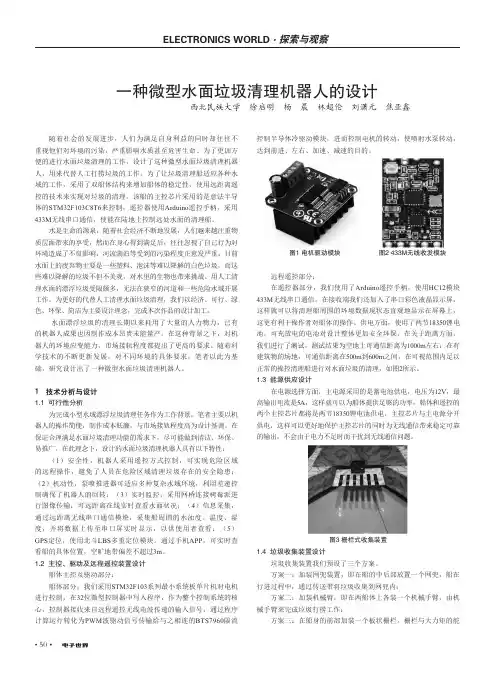
该船的主控芯片采用的是意法半导体的STM32F103C8T6来控制,遥控器使用Arduino 遥控手柄,采用433M 无线串口通信,使能在陆地上控制远处水面的清理船。
水是生命的源泉,随着社会经济不断地发展,人们越来越注重物质层面带来的享受,然而在身心得到满足后,往往忽视了自己行为对环境造成了不良影响,河流湖泊等受到的污染程度正愈发严重。
目前水面上的废弃物主要是一些塑料、泡沫等难以降解的白色垃圾,而这些难以降解的垃圾不但不美观,对水里的生物也带来挑战。
用人工清理水面的漂浮垃圾受限颇多,无法在狭窄的河道和一些危险水域开展工作。
为更好的代替人工清理水面垃圾清理,我们以经济、可行、绿色、环保、简洁为主要设计理念,完成本次作品的设计加工。
水面漂浮垃圾的清理长期以来耗用了大量的人力物力,已有的机器人成果也因制作成本昂贵未能量产。
在这种背景之下,对机器人的环境应变能力,市场接轨程度都提出了更高的要求。
随着科学技术的不断更新发展,对不同环境的具体要求,笔者以此为基础,研究设计出了一种微型水面垃圾清理机器人。
1 技术分析与设计1.1 可行性分析为完成小型水域漂浮垃圾清理任务作为工作背景,笔者主要以机器人的操作简便,制作成本低廉,与市场接轨程度高为设计基调。
在保证合理满足水面垃圾清理功能的需求下,尽可能做到清洁、环保、易推广。
在此理念下,设计的水面垃圾清理机器人具有以下特性:(1)安全性,机器人采用遥控方式控制,可实现危险区域的远程操作,避免了人员在危险区域清理垃圾存在的安全隐患;(2)机动性,泵喷推进器可适应多种复杂水域环境,利用差速控制确保了机器人的回转;(3)实时监控,采用网桥连接树莓派进行图像传输,可远距离在线实时查看水面状况;(4)信息采集,通过远距离无线串口通信模块,采集船周围的水浊度、温度、湿度,并将数据上传至串口屏实时显示,以供使用者查看;(5)GPS 定位,使用北斗LBS 多重定位模块。
水下垃圾清理机器人的设计摘要:为了有效地进行水域的治理,本文提出了一种基于水流动性的双体船型水面垃圾清理机器人。
本文对此机器人的功能、机械构造、工作原理等进行了详尽的说明。
主要功能是利用水泵产生的局部水流推动垃圾进入清洁舱内,从而实现对垃圾的清理。
关键词:水下垃圾;清理;机器人;设计由于海洋拥有广阔的空间,它已成为人类在陆地上生活、生产的必经之路。
大量的垃圾,在这片海域之中飘荡,对周围的环境造成了极大的影响。
为了达到更好的环保目的,世界各地对水域中的垃圾进行了大量的处理,但是效果并不是很好。
为了清除水上的浮物,各类水上垃圾清洁机器人相继问世。
大多数的机器人,都是将垃圾收集起来,这样的话,效率就会降低,打扫起来也会很麻烦。
为了有效地清除和提高工作效率,开发了一种能使垃圾自动进入的流动式表面垃圾清理机器人。
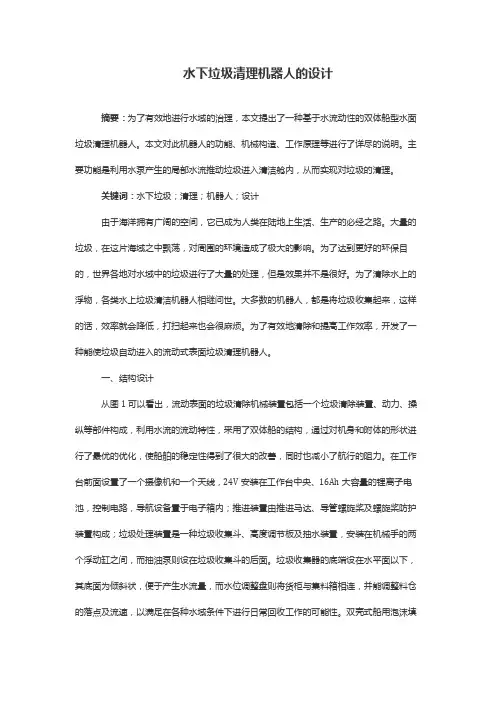
一、结构设计从图1可以看出,流动表面的垃圾清除机械装置包括一个垃圾清除装置、动力、操纵等部件构成,利用水流的流动特性,采用了双体船的结构,通过对机身和附体的形状进行了最优的优化,使船舶的稳定性得到了很大的改善,同时也减小了航行的阻力。
在工作台前面设置了一个摄像机和一个天线,24V安装在工作台中央、16Ah大容量的锂离子电池,控制电路,导航设备置于电子箱内;推进装置由推进马达、导管螺旋桨及螺旋桨防护装置构成;垃圾处理装置是一种垃圾收集斗、高度调节板及抽水装置,安装在机械手的两个浮动缸之间,而抽油泵则设在垃圾收集斗的后面。
垃圾收集器的底端设在水平面以下,其底面为倾斜状,便于产生水流量,而水位调整盘则将货柜与集料箱相连,并能调整料仓的落点及流速,以满足在各种水域条件下进行日常回收工作的可能性。
双壳式船用泡沫填充泡沫材料,不仅能达到对应的浮动压力,而且能对浮动容器进行密闭,确保不渗漏,提高船舶的稳定性能。
(a)3维示意图二、推进系统本系统采用STM32单片机为主要控制单元,NEO-M8NPixhawkAPM为主要控制器,采用内置GPS和罗盘的N-M8NPixhawkAPM微控制器,采用FPV700单板高清摄像机。
水面漂浮垃圾收集机器人的系统设计黄庆典(广东慧航物联科技有限公司,广东东莞523000)摘要:如今各水域与河道上存在越来越多的漂浮垃圾,影响了城市的形象,破坏了水域生物的生态环境,假若漂浮垃圾长时间不清理,还会散发出恶臭的气味,危及居民健康。
针对该问题,设计出一种水面漂浮垃圾收集机器人,清洁人员能够根据机器人传输的视频图像远程控制该机器人收集处理水面上的漂浮垃圾。
机器人系统由驱动模块、垃圾收集模块、中央控制模块、传感模块组成,具有安装容易、故障率低、稳定性高的优点。
关键词:水面漂浮;机器人;垃圾收集0引言进入21世纪以来,快速增长的生活消费与工厂生产一定程度上导致了水域受垃圾污染的情况加重。
水域污染不仅影响了各大生态系统,同时影响着居住环境、居民的身体健康[1]。
目前,水面漂浮垃圾治理方法普遍是清洁人员利用船只配合打捞工具在污染水域巡航打捞。
该方法不仅工作效率不高,而且清洁工的劳动强度大,易受烈日寒冬影响,并且腐臭环境对清洁工的身体有不良影响。
因此,有必要设计出一种远程控制的水面漂浮垃圾收集机器人,代替清洁人员在恶劣的工作环境下作业。
为使机器人工作时具有良好的可持续性与可操控性,本文结合光伏技术与图像传输技术,设计了一种可远程控制的水面漂浮垃圾收集机器人,以改善清洁工人工作条件,提高工作效率,降低水域治理成本。
该系统采用模块化设计,机器人由驱动模块、垃圾收集模块、中央控制模块、传感模块组成,可稳定高效地完成工作任务。
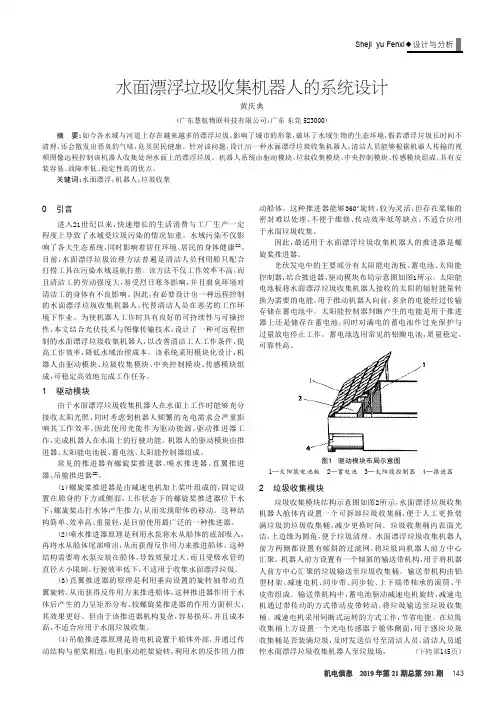
1驱动模块由于水面漂浮垃圾收集机器人在水面上工作时能够充分接收太阳光照,同时考虑到机器人频繁的充电需求会严重影响其工作效率,因此使用光能作为驱动能源,驱动推进器工作,完成机器人在水面上的行驶功能。
机器人的驱动模块由推进器、太阳能电池板、蓄电池、太阳能控制器组成。
常见的推进器有螺旋桨推进器、喷水推进器、直翼推进器、吊舱推进器[2]。
(1)螺旋桨推进器是由减速电机加上桨叶组成的,固定设置在船身的下方或侧面,工作状态下的螺旋桨推进器位于水下,螺旋桨击打水体产生推力,从而实现船体的移动。

湖面清扫智能机器人的控制系统设计1、引言机器人是上个世纪中叶迅速发展起来的高新技术密集的机电一体化产品,它作为人类的新型生产工具,在减轻劳动强度、提高生产率、改变生产模式,把人从危险、恶劣的环境下解放出来等方面,显示出极大的优越性。
在发达国家,工业机器人已经得到广泛应用。
随着科学技术的发展,机器人的应用范围也日益扩大,遍及工业、国防、宇宙空间、海洋开发、紧急救援、危险及恶劣环境作业、医疗康复等领域。
进入21世纪,人们已经越来越切身地感受到机器人深入生产、深入生活、深入社会的坚实步伐。
机器人按其智能程度可分为一般机器人和智能机器人。
一般机器人是指不具有智能,只具有一般编程能力和操作功能的机器人;智能机器人是具有感知、思维和动作的机器人。
所谓感知即指发现、认识和描述外部环境和自身状态的能力,如装配机器人需要在非结构化的环境中认识障碍物并实现避障移动,这依赖于智能机器人的感觉系统,即各种各样的传感器;所谓思维是指机器人自身具有解决问题的能力,比如,装配机器人可以根据设计要求为一部复杂机器找到零件的装配办法及顺序,指挥执行机构,即指挥动作部分完成这部机器的装配;动作是指机器人具有可以完成作业的机构和驱动装置。
由此可见,智能机器人是一个复杂的软件、硬件综合体。
机器人的核心是控制系统。
机器人的先进性和功能的强弱通常都直接与其控制系统的性能有关。
机器人控制是一项跨多学科的综合性技术,涉及自动控制、计算机、传感器、人工智能、电子技术和机械工程等多种学科的内容。
近年来,随着工业和其它服务行业的蓬勃发展,人们在重视其经济效益的同时却往往忽略了他们对环境的污染,人类赖以生存的水资源也不例外。
水面污染对人类的水源构成很大的威胁,湖泊尤其是旅游胜地和市内人工湖泊,更是无法逃避漂浮物污染的厄运,举目可见各种日常消费品的包装物在湖面上漂浮。
污染的加剧根治水污染。
但是,水面污染的治理是一项艰难的长期任务,是全人类必须面对的共同问题。

摘要:设计一种新型的水上清洁机器人。
把指南针引入自动控制系统,实现了螺旋前进运动,大大简化了操作过程。
工作时只需用遥控器设定它的旋转半径和前进方向,就可以自动地完成水面清洁任务。
由于采用了柔性舵,转向更灵敏,从而保证了它具有良好的机动性。
经过试验取得了良好的效果。
关键词:打捞机构;指南针加速检测;柔性舵;水上清洁在现实生活中有许多水源,如河流、人工湖、浅水面、海水浴场等,水面上都漂浮着塑料袋、泡沫、过量的水藻、树叶等很多垃圾,严重影响着人们的健康生活和环境的美丽。
现在已有的大型打捞船体积大、成本高,需要多人同时协同工作,而且不能进入小区域实施打捞工作。
在很多小型区域水面上依然是依靠人工打捞垃圾,而人工打捞工作难度和劳动强度都很大。
为了解决这一问题,我们设计制作了水上清洁机器人。
它具有成本低、体积小、操作灵活等优点,非常适合在小型区域进行打捞清洁作业,而且实现了自动化的控制,操作人员只需利用遥控器设定两个实际工作参数,水上清洁机器人就可以自动完成水上的清洁任务。
1设计思路通常来说,垃圾在水面上的分布是不均匀的,如图1所示。
若是采用直线式往复运动的轨迹打捞,由于垃圾相对于水面有一定的漂移,打捞效果不好,操纵人员需要根据垃圾分布不均匀的情况不停地来回操纵,费时费力,且对机器损害较大。
经分析发现,螺旋前进运动的轨迹是比较理想的,这种运动轨迹具有渐进性,只要设定旋转半径和螺旋渐进方向即可,简化了操纵过程,而且同一区域的水面可以被清洁多次,清洁效果较好,如图2所示。
图1水面上垃圾分布示意图图2改变旋转半径控制清洁范围设计要求机器人能够自动完成螺旋前进运动,并且螺旋半径可以调节。
仅改变转向舵的角度只能使船体绕某一中心的旋转,并不能实现船体沿某一方向偏移前进。
曾考虑使用陀螺仪,考虑到它的价格非常昂贵,需要的处理电路过于复杂,而我们需要的只是一个精度要求不高的开关信号,所以最终采用了指南针,同样达到了很好的效果。

智能水上漂浮物清洁器的设计摘要:现在,在国家快速的发展进程下,人们对金融经济的重视程度往往高于对环境的环,随着社会的不断进步,环境的保护永远都重于任何利益,鉴于对环境的保护,我们对不同区域及地域的水面进行了多次勘察,并研究了大量相关智能的文献进行对比,最终提出了一种能够清洁水面漂浮物的智能化机器。
该设计能全方位的在各种不同的复杂水域进行清洁,新能源动力系统加上智能工作能将工作效率达到最大化。
关键词:漂浮物;复杂水域;智能化;清洁器1 引言在这个经济你追我赶的时代,往往有些人会有一些固性思维,认为先搞经济在回过头来处理环境,可当回过头来时,才发现环境污染已经不是一个点的区域了,而是一片一片了。
等到那时候去清洁的时候,往往会花费很大的利益,久而久之就会一直拖着再去清理已经无法挽回了。
水上清洁器的研究就由此应运而生,水上漂浮物的清理是一项长期而又艰巨的任务。
根究研究显示,目前所研究出来的水上机器人多用于对水质的检测、对水文的研究测量及水下地形勘测。
然而,对城镇、农村的河道、水湖的水面上的漂浮物清理的设备却少之又少,更别说广泛普及了。
相信大家经过各种水域时,都会时不时的看到水面上有一些我们生活常见的垃圾,大家的随手一扔,积少成多,日子久了就会造成严重的污染。
因此,开发一种能全天候都在清洁这些水域水面上的漂浮物是非常有必要的[1]。
2 整体方案设计在本研究中,我们将设计方案分为三部分:第一部分就是控制系统的设计,通过80c51通用的单片机进行对硬件的控制;第二部分动力能源的综合相辅;第三部分就是切割的设计及收集装置的结构设计。
在设计上,我们设计的智能漂浮物清洁器选材的基本材料在市场上几乎都可以买得到,所以她得结构简单,操作也非常方便。
在查阅了相关材料的资料,综合零件使用性能的要求、材料的工业性能和选材的经济实惠,设计出其结构能使用寿命长及耐用的水上清洁器。
2.1控制系统主要是基于AT80C51单片机的集成控制,以keil来进行程序编写及stc的烧写软件进行驱动的控制,选用AT80C51单片机主要是它的性能能够处理多种反馈得到呃信息,并且有着可反复擦写Flash和256 bytes。
一种水面漂浮物自动清理机器人结构设计史浩辉;李莉莉;付宗国;罗准;官俊【摘要】为了解决传统的垃圾打捞船难以解决的小型水面悬浮物的问题,提出一种利用“漩涡”和网筛工作原理,并以太阳能为新能源的一种水面漂浮物清理机器人的设计方案.实现对水体的“二次清理”,也可在水面航行过程或在静止在某固定点完成垃圾的收集,方便灵活.【期刊名称】《机械工程师》【年(卷),期】2019(000)001【总页数】3页(P110-112)【关键词】新能源;机器人;网筛过滤;环保设备【作者】史浩辉;李莉莉;付宗国;罗准;官俊【作者单位】浙江海洋大学船舶与机电工程学院,浙江舟山316022;浙江海洋大学船舶与机电工程学院,浙江舟山316022;浙江海洋大学船舶与机电工程学院,浙江舟山316022;浙江海洋大学船舶与机电工程学院,浙江舟山316022;浙江海洋大学船舶与机电工程学院,浙江舟山316022【正文语种】中文【中图分类】TP242.30 引言当前国内外对于封闭或小型水域垃圾清理研究较少,水上垃圾清理主要以人工清理为主。
虽然目前国内外所开发出的垃圾清理船种类繁多,作用原理也不一而足,但它们大都是定位于江、河、湖、海等大面积水域的垃圾清理,而且只能对于水中的较大体积的漂浮物进行清理,而对于水中较小的悬浮垃圾却是束手无策,不能对水体的清洁作进一步的处理。
本文设计了一种水面漂浮物自动清理机器人,不仅可以清理较大体积漂浮物,而且可以清理水面小型的悬浮物(如浮萍、藻类、果皮等)[1],解决了传统的垃圾打捞船难以解决的小型水面悬浮物的问题。
1 水面漂浮物清理机器人1.1 水面机器人主要结构水面漂浮物自动清理机器人,包括船体及船体的前后两侧分别设置的前阀门和后阀门,且船体中设有网筛。
船体的内部为用于放置网筛的主舱室、船体前舱、船体后舱、片体内隙、船舱侧隙组成;前舱阀门的启闭型式为滑移式,并且船体前舱和船体后舱通过船舱侧隙连接。
船体底部安装有斗状套筒,斗状套筒末端与水泵进水口相连;在水泵出水口安装电磁阀,在船体底部后侧对称安装两个水下推进器;且水下推进器上都设有推进器螺旋桨。
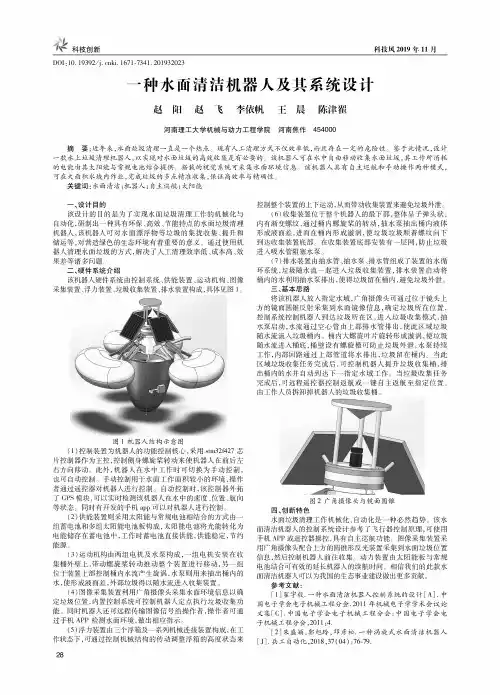
科技创新科技风2019年11月DO/10.19392/kC1671-7341.201932023一种水面清洁机器人及其系统设计赵阳赵飞李依帆王晨陈津翟河南理工大学机械与动力工程学院河南焦作454000摘要:近年来,水面垃圾清理一直是一个热点。
现有人工清理方式不仅效率低,而且存在一定的危险性。
鉴于此情况,设计一款水上垃圾清理机器人,以实现对水面垃圾的高效收集是有必要的。
该机器人可在水中自由移动收集水面垃圾,其工作所消耗的电能由其太阳能与常规电池结合提供。
搭载的视觉系统可采集水面环境信息。
该机器人具有自主巡航和手动操作两种模式,可在大面积水域内作业,完成垃圾的多点精准收集,保证高效率与精确性。
关键词:水面清洁;机器人;自主巡航;太阳能一、设计目的该设计的目的是为了实现水面垃圾清理工作的机械化与自动化,研制出一种具有环保、高效、节能特点的水面垃圾清理机器人,该机器人可对水面漂浮物等垃圾的集拢收集、提升和储运等,对营造绿色的生态环境有着重要的意义。
通过使用机器人清理水面垃圾的方式,解决了人工清理效率低、成本高、效果差等诸多问题。
二、硬件系统介绍该机器人硬件系统由控制系统、供能装置、运动机构、图像采集装置、浮力装置、垃圾收集装置、排水装置构成,具体见图1$图1机器人结构示意图(1)控制装置为机器人的功能控制核心,采用stm32f427芯片控制器作为主控,控制侧身螺旋桨转动来使机器人在前后左右方向移动。
此外,机器人在水中工作时可切换为手动控制,也可自动控制。
手动控制用于水面工作面积较小的环境,操作者通过遥控器对机器人进行控制。
自动控制时,该控制器外拓了GPS模块,可以实时检测该机器人在水中的速度、位置、航向等状态。
同时有开发的手机FP可以对机器人进行控制。
(2+供能装置则采用太阳能与常规电池相结合的方式由一组蓄电池和多组太阳能电池板构成,太阳能电池将光能转化为电能储存在蓄电池中,工作时蓄电池直接供能,供能稳定,节约能源。
智能型水面垃圾清理机器人控制系统的设计与研究目录1. 内容概括 (3)1.1 研究背景 (3)1.2 研究目的与意义 (5)1.3 论文结构概述 (6)2. 文献综述 (7)2.1 机器人技术概述 (8)2.2 水面垃圾清理需求与现状 (9)2.3 机器人控制系统设计方法及特点 (11)2.4 相关研究成果与经验 (12)2.5 未来研究方向与趋势 (13)3. 系统需求分析 (15)3.1 功能需求 (16)3.2 性能指标 (17)3.3 设计限制与约束 (18)4. 系统总体设计 (19)4.1 机器人的硬件架构 (20)4.2 软件架构选型 (22)4.3 数据采集与处理 (24)4.4 控制系统核心模块设计需求 (25)5. 核心模块详细设计与实现 (26)5.1 图像处理与识别模块 (28)5.2 自主导航与路径规划模块 (29)5.3 垃圾抓取与运输模块 (30)5.4 避障与杨烤盘上情景应对模块 (31)5.5 能量管理与充电模块 (32)6. 系统集成与测试 (34)6.1 硬件集成实施 (35)6.2 软件集成开发与测试平台 (37)6.3 接口与通信协议测试 (38)6.4 整体系统集成测试与仿真验证 (39)7. 结果与讨论 (41)7.1 实验结果分析 (43)7.2 性能测试评估指标 (44)7.3 故障分析与改进 (45)7.4 用户反馈与后续优化建议 (47)8. 结论与展望 (48)8.1 总结研究主要贡献 (49)8.2 系统应用的实际效果 (50)8.3 未来研究方向与科学建议 (51)1. 内容概括随着城市化进程的加速和人类生活水平的提高,水环境污染问题愈加严峻。
水面垃圾污染尤为突出,严重影响着生态环境和人们生活质量。
针对水面垃圾清除需求,本论文设计并研究了一套智能型水面垃圾清理机器人控制系统。
该系统集成了多传感器数据融合、路径规划、控制算法以及垃圾识别技术,实现了智能化自动清除水面垃圾的功能。
一种水面漂浮物自动清理机器人结构设计史浩辉,李莉莉,付宗国,罗准,官俊(浙江海洋大学船舶与机电工程学院,浙江舟山316022)摘要:为了解决传统的垃圾打捞船难以解决的小型水面悬浮物的问题,提出一种利用“漩涡”和网筛工作原理,并以太阳能为新能源的一种水面漂浮物清理机器人的设计方案。
实现对水体的“二次清理”,也可在水面航行过程或在静止在某固定点完成垃圾的收集,方便灵活。
关键字:新能源;机器人;网筛过滤;环保设备中图分类号:TP242.3文献标志码:A文章编号:员园园圆原圆猿猿猿(圆园员9)01原园110原园3 Structural Design of an Automatic Cleaning Robot for Water Surface Floating ObjectSHI Haohui,LI Lili,FU Zongguo,LUO Zhun,GUAN Jun(School of Naval Architecture and Electromechanical Engineering,Zhejiang Ocean University,Zhoushan316022,China) Abstract:In order to solve the problem that traditional garbage salvage vessels are difficult to collect small water surface floating objects,this paper proposes a design scheme of a surface floating object cleaning robot that uses the principle of whirlpool and mesh screen and uses solar energy as new energy.To achieve the"secondary clean-up"of water,it is also convenient and flexible to collect garbage in the surface navigation process or at a fixed point.Keywords:new energy;robot;mesh screen filtering;environmental protection equipment0引言当前国内外对于封闭或小型水域垃圾清理研究较少,水上垃圾清理主要以人工清理为主。
虽然目前国内外所开发出的垃圾清理船种类繁多,作用原理也不一而足,但它们大都是定位于江、河、湖、海等大面积水域的垃圾清理,而且只能对于水中的较大体积的漂浮物进行清理,而对于水中较小的悬浮垃圾却是束手无策,不能对水体的清洁作进一步的处理。
本文设计了一种水面漂浮物自动清理机器人,不仅可以清理较大体积漂浮物,而且可以清理水面小型的悬浮物(如浮萍、藻类、果皮等)[1],解决了传统的垃圾打捞船难以解决的小型水面悬浮物的问题。
1水面漂浮物清理机器人1援1水面机器人主要结构水面漂浮物自动清理机器人,包括船体及船体的前后两侧分别设置的前阀门和后阀门,且船体中设有网筛。
船体的内部为用于放置网筛的主舱室、船体前舱、船体后舱、片体内隙、船舱侧隙组成;前舱阀门的启闭型式为滑移式,并且船体前舱和船体后舱通过船舱侧隙连接。
船体底部安装有斗状套筒,斗状套筒末端与水泵进水口相连;在水泵出水口安装电磁阀,在船体底部后侧对称安装两个水下推进器;且水下推进器上都设有推进器螺旋桨。
船体与机器人上盖通过U型滑槽滑动连接,机器人上盖前端设置有激光雷达传感器,船体后舱内设置有控制装置;且控制装置为控制在船体底部的水泵工作,还控制着水下推进器的转速,船体前舱里安装超级电容[2]。
实现太阳能充电和内置电池储电的互换,通过无线电无线遥控、自主控制互换的方式实现清理垃圾的智能化。
1.2机器人流线型外形为了减少机器人在水下时,由于水体对机器人表面造成的阻力问题,提高水面垃圾清理机器人在湖面、河流中的能动性。
我们把该机器人的外形构造为流线型外形,提出构思的想法和高速列车的车头结构大致相同,对于水流有顺流作用,以此来减少水中阻力对机器人的能源消耗,同时也更加美观[3]。
如图2所示,网筛的顶部为通过船舱侧隙表面上设置的网筛扣固定,整体侧面都为流线型外型。
2主要设备与性能2.1网筛过滤装置和仓内垃圾处理如图3,船体的主舱室、船体前舱、船体后舱中都放置图1水面漂浮物自动清理机器人的3/4结构示意图后阀门2.船盖侧夹层3.片体内隙4.推进器螺旋桨水下推进器主体6.水泵7.电磁阀8.斗状套筒9.前舱10.前阀门11.激光雷达传感器12.船盖前夹层太阳能电池板131110987651110圆园员9年第1期网址:电邮:hrbengineer@网址: 电邮:hrbengineer@ 圆园员9年第1期了大量网筛18进行水体中垃圾的过滤,当船体底部的水泵6工作,在水面产生一个水势差,水流通过前后进水口进入主舱室22,此时船舱中的水被水泵从船体抽出,水体中的垃圾在网筛18过滤下留在网筛中,从而实现了水中垃圾的收集。
该装置过滤是利用可调节的网筛孔大小,把漂浮物和水体分离的技术。
三面船体的两侧偏上方孔径略大于底面孔径,水流通过网筛时因流量差在舱体中出现小型漩涡,可加速水从水泵中抽出,底面网筛孔可调为超小,水体流过网筛,水中漂浮物因大于网筛孔径而被吸附在船舱中,并且不会危及到水中微生物。
同时可根据需要收集漂浮物的不同大小,进行网筛孔径的调节[4]。
机器人在结束漂浮物清理工作后,由于该机器人采用的太阳能板顶盖和机器人主仓室的拼接结构,只需将太阳能顶盖拆下便可对贮藏室内进行清理。
与此同时还可以对主仓室内过滤网进行更换或者清洗,从而使得过滤网内部也能得到程度的水域,达到不同层次的清理效果[5]。
2.2太阳能供电板装置众所周知太阳能充电器因其清洁、便利等特点越来越广泛地运用到各种仪器上。
在睡眠漂浮物自动清洗的机器人上安装一层太阳能收集板可以节约一定的能源,实现一定量的能源自供给[6]。
而太阳板的安装的主要目的不仅仅在于能一定程度上地节约能源,在某些特殊条件下,一旦机器人在水中能量耗尽无法取回,太阳能电池板则在这时起到了良好的能源收集作用,通过利用太阳能能力实现对电容的充电,从而免去了打捞等不必要的工作。
而太阳能电池板作为太阳能充电器中最为关键的部分,其设计也因此尤为重要。
目前市场上价格适中,且光电转化效率相对较高的因数晶硅太阳能电池板,其充电效率可以达到20%以上。
为了能尽可能多地提高机器人能源自给能力,模块式的晶硅太阳能电池板则是作为太阳能板设计的不二之选,通过模块式的拼接可以最大程度上利用机器人表面的面积,对机器人上表面进行几乎全面化的太阳能板包裹,从而充分提高太阳能收集板的能源供给能力[7]。
具体结构如图4所示。
2.3备用能源超级电容装置船体前舱9里安装超级电容,在系统中作为能量存储装置。
在太阳能供电不足时向负载供电,在太阳能供电富余时吸收、存储多余的能量。
超级电容是通过充电、放电的环节从而实现电能的储存和供给。
以前的电容不可避免地会有着容量较小、储存电能的能力弱等问题,所以不能作为电力能源的储存容器。
但近年来由于对电容方面进一步的深入研究,部分电容也逐步克服了以上问题,因此便催生出了“超级电容”。
超级电容的迅速发展使得其迅速在能源储备中占据一席之地。
超级电容这种新型的储能设备,其容量达到上千法拉。
并且其可多次重复充电且区别于传统蓄电池具有一定污染,超级电池绿色环保。
但超级电容其归根结底还是电容,经长时间的工作,不可避免地也会出现漏电的现象,且由于电容的电气特性,其只适用于直流储能并不适用于交流储能。
因此该水面漂浮物自动清理机器人的工作电流为直流电。
超级电容的装配可以将超级电容的优点充分体现在机器人身上,不仅如此,通过日常的检测以及定期的保养,超级电容的漏电等不稳定现象发生的几率也会大大地减少[8]。
作为滤波器,对光伏电池输出的不稳定的电能进行滤波,输出稳定的电能;与光伏阵列及单向DC/DC 相配合,实现MPPT (最大功率点跟踪)[9]。
水上垃圾清理机器人的上盖21的侧夹层2和后夹层19用于设置电流整流滤波等电路。
具体结构如图4所示。
2.4电磁阀检测装置经过滤的水储存在船体后舱中,当储存到一定量时,产生的水压通过感应装置使得水泵6产生转动,水泵6转动抽取后舱中的水,通过进水口的阀门开口大小的调节,对流量进行一个闭环控制,从而使系统在不同负重下维持在一个平衡状态。
水中的垃圾在网筛过滤下留在网筛中,了水中垃的收集,后的水被泵从水底水口设置电磁阀7[10],制出水口在水泵停图2水面漂浮物自动清理机器人的船体结构示意图15.船舱侧隙16.U 型滑槽17.网筛扣171615图3机器人网筛剖面图6.水泵9.船体前舱14.船体后舱18.网筛22.船体主舱室922618141391321199图4太阳能板和内置电容示意图9.内置超级电容13.太阳能电池板19.船盖后夹层21.上盖图5电磁阀检测装置示意图4.推进器螺旋桨5.水下推进器主体6.水泵7.电磁阀8.斗状套筒87654111圆园员9年第1期网址: 电邮:hrbengineer@工作时候关闭,防止水流倒灌进入主舱室。
推进器螺旋桨4和水下推进器主体5为船体提供前进推动力,同时控制装置的方向[11]。
2.5机器人水面深度控制该机器人通过收集水面漂浮物达到净化河流的目的,当然,随着收集量的增加同时也会使得机器人自身重力增大。
如果在没有足够浮力支撑的情况下,机器人则会因自身质量的增加而下沉。
而PID 控制器作为一种线性控制装置[12],它会根据预先设定好的给定值(深度)以及所处环境的实际值构成的控制偏差,对偏差进行计算从而转化为控制信号给予相应的控制器。
通过对进水口的阀门开口大小进行调节,对通过排水阀的流量进行闭环控制,从而使得该机器人在水面以上的高度维持恒定,保证了机器人在收集漂浮物时的工作环境[13]。
3清理漂浮物流程当水面漂浮物自动清理机器人工作时,由设置在船体后舱14内的控制装置控制,船体底部的水泵6工作,在水面产生一个水势差,水流通过前后进水口进入主舱室22,可通过水泵转速和进水口的阀门开口大小的调节,对流量进行一个闭环控制,从而使系统在不同负重下维持在一个平衡状态。
水中的垃圾在网筛18过滤下留在网筛从而实现了水中垃圾的收集,过滤后的水被水泵水底抽出。
在水泵出水口设置有电磁阀7,控制出水口的开启和闭合,在水泵停止工作时候关闭,防止水流倒灌进入主舱室。