水面可移动清洁机器人
- 格式:doc
- 大小:85.00 KB
- 文档页数:5
海洋清理机器人科技技巧-概述说明以及解释1.引言1.1 概述概述部分主要对海洋清理机器人科技技巧的背景和重要性进行简要介绍。
海洋清理机器人是一种应用于海洋环境中的高科技装置,旨在清理和治理海洋污染。
随着人类活动的不断增加,海洋垃圾和污染物成为了严重问题,给海洋生态系统和人类健康造成威胁。
传统的海洋清理方式通常采用人工搜集方法,但效率低下、成本高昂,并且对人类身体健康存在风险。
而海洋清理机器人则是一种自动化的解决方案,无需人工干预,能够更加高效、安全地进行海洋清理工作。
海洋清理机器人科技技巧包括多个方面的技术,例如智能感知技术、图像识别技术、机器学习技术、气象及水文学知识等。
通过辅助这些技术,海洋清理机器人能够准确地定位和识别海洋垃圾,并进行有效的清理和处理。
海洋清理机器人的出现对于保护海洋生态环境具有重要意义。
它能够大幅提高清理效率,帮助减少海洋垃圾对生态系统的破坏,保护海洋生物的多样性和数量。
此外,它也有助于促进可持续发展,为未来的海洋资源利用提供良好的环境条件。
本文将深入探讨海洋清理机器人科技技巧的应用与发展,以及对环境保护的意义和未来发展的展望。
通过对这些内容的全面阐述,旨在提高读者对海洋清理机器人科技技巧的认识和理解,进一步推动海洋环境保护工作的开展。
1.2文章结构文章结构部分的内容可以如下编写:2.文章结构本文将从四个主要方面介绍海洋清理机器人的科技技巧,以帮助读者全面了解该领域的发展和应用。
具体的内容安排如下:2.1 技术一首先,我们将介绍最新的海洋清理机器人技术一。
通过对该技术的详细介绍,我们可以了解到它在海洋环境中的应用和效果,以及其与传统清理方法相比的优势。
2.2 技术二接下来,本文将对海洋清理机器人的技术二进行深入探讨。
这一部分将重点介绍该技术的工作原理、关键技术和应用案例,以及在实际海洋清理任务中的表现和效果。
2.3 技术三第三部分将介绍海洋清理机器人的技术三。
我们将探讨该技术的创新点和挑战,并通过对相关研究和实验的分析,评估其在海洋环境中的可行性和可持续性。
小型水面垃圾清理机器人摘要:小型水面垃圾清理机器人立足于旅游景区、城市内河等狭长的静水水域,主要用于解决目前缺少高效率、高安全系数的打捞设备而给水面垃圾打捞带来的种种问题。
该机器人可对水面漂浮物等垃圾进行集拢收集、提升和储运等,可解决人工清理效率低、成本高、效果差等诸多问题,对营造绿色的生态环境有着重要的意义。
关键词:水面清理;自动化;小型水域;高效环保引言随着工业化的发展,环境问题逐渐走进了人们的视野并受到了极大的关注。
近年来,水域的污染问题越来越受到重视,尤其是旅游景区、城市内河等狭长的静水水域,由于游人或行人众多,很容易在水面积累垃圾。
目前国内对于城市河道和景区湖泊的清理主要靠人工进行,即工人驾驶机动或非机动船舶对湖面垃圾进行打捞,耗时耗力不说,而且受限颇多,无法在狭窄的水面和一些危险水域开展工作且装载垃圾较少,并且工人长期在水面劳作,安全问题也难以保证。
国外和一些国内大厂采用机动船舶进行垃圾采集,净化水域的同时又污染了空气,尽管这种方式效率很高,但仅局限于大型海面或湖面,对于城市河道和景点湖泊并不很实用。
不符合当今社会科技和工业发展的需求。
1.国内外研究现状分析1.1国外研究现状一位来自南非的企业家Richard Hardiman发明了一款名为“垃圾鲨鱼” (WasteShark)的水上机器人,它可以在港口附近自主巡游,可以“吃”掉大部分海洋垃圾。
WasteShark的出现可以持续有效地清理水面,因为水面垃圾清理的越及时,就会有更少的垃圾沉入海底。
还具备收集数据的功能,像水质、水深和天气情况等等,这些数据都能实时反馈给港口提高行船安全。
1.2国内研究现状中国科学院合肥物质科学研究院智能机械研究所研究员刘锦淮课题组研发出“风光互补”自主式水面机器人。
其采用了风力和太阳能发电动力技术,解决了续航问题,并且可以清理水面油污。
2.整体结构设计2.1垃圾清理模块采用机械臂抓取水面垃圾,传送带辅助作业。
• 50•随着社会的发展进步,人们为满足自身利益的同时却往往不重视他们对环境的污染,严重影响水质甚至危害生命。
为了更加方便的进行水面垃圾清理的工作,设计了这种微型水面垃圾清理机器人,用来代替人工打捞垃圾的工作。
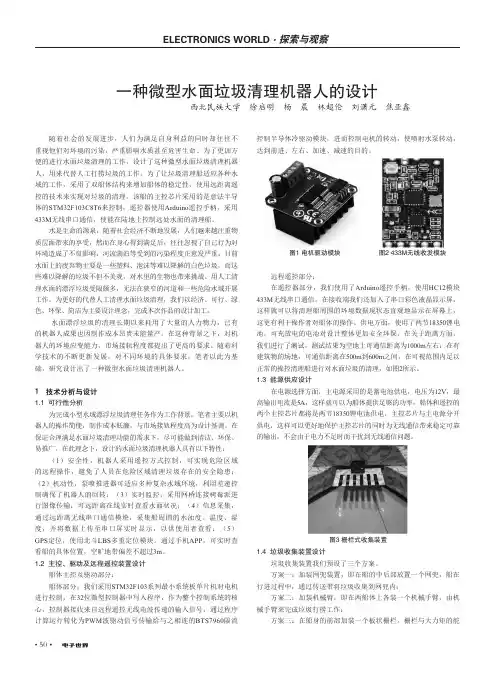
为了让垃圾清理船适应各种水域的工作,采用了双船体结构来增加船体的稳定性,使用远距离遥控的技术来实现对垃圾的清理。
该船的主控芯片采用的是意法半导体的STM32F103C8T6来控制,遥控器使用Arduino 遥控手柄,采用433M 无线串口通信,使能在陆地上控制远处水面的清理船。
水是生命的源泉,随着社会经济不断地发展,人们越来越注重物质层面带来的享受,然而在身心得到满足后,往往忽视了自己行为对环境造成了不良影响,河流湖泊等受到的污染程度正愈发严重。
目前水面上的废弃物主要是一些塑料、泡沫等难以降解的白色垃圾,而这些难以降解的垃圾不但不美观,对水里的生物也带来挑战。
用人工清理水面的漂浮垃圾受限颇多,无法在狭窄的河道和一些危险水域开展工作。
为更好的代替人工清理水面垃圾清理,我们以经济、可行、绿色、环保、简洁为主要设计理念,完成本次作品的设计加工。
水面漂浮垃圾的清理长期以来耗用了大量的人力物力,已有的机器人成果也因制作成本昂贵未能量产。
在这种背景之下,对机器人的环境应变能力,市场接轨程度都提出了更高的要求。
随着科学技术的不断更新发展,对不同环境的具体要求,笔者以此为基础,研究设计出了一种微型水面垃圾清理机器人。
1 技术分析与设计1.1 可行性分析为完成小型水域漂浮垃圾清理任务作为工作背景,笔者主要以机器人的操作简便,制作成本低廉,与市场接轨程度高为设计基调。
在保证合理满足水面垃圾清理功能的需求下,尽可能做到清洁、环保、易推广。
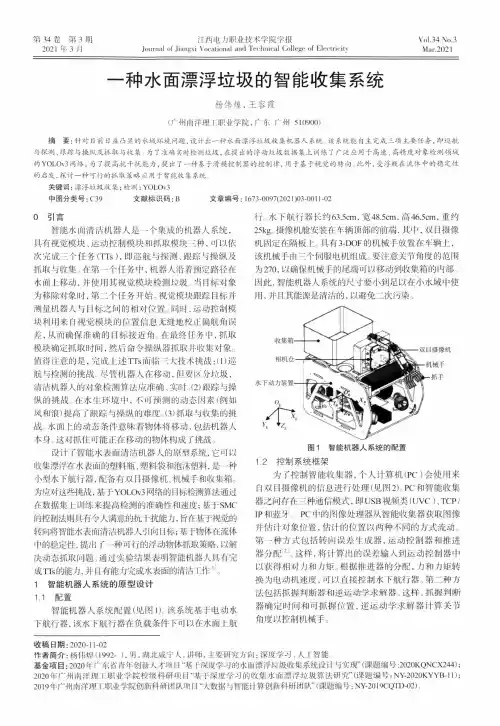
在此理念下,设计的水面垃圾清理机器人具有以下特性:(1)安全性,机器人采用遥控方式控制,可实现危险区域的远程操作,避免了人员在危险区域清理垃圾存在的安全隐患;(2)机动性,泵喷推进器可适应多种复杂水域环境,利用差速控制确保了机器人的回转;(3)实时监控,采用网桥连接树莓派进行图像传输,可远距离在线实时查看水面状况;(4)信息采集,通过远距离无线串口通信模块,采集船周围的水浊度、温度、湿度,并将数据上传至串口屏实时显示,以供使用者查看;(5)GPS 定位,使用北斗LBS 多重定位模块。
智能水面垃圾清洁机器人作者:耿若楠陈沛李志文程继航卞宇宸来源:《科学导报·学术》2020年第48期随着社会的快速发展,人们的生活质量不断提高,制造的生活垃圾也越来越多。
由于环保意识的缺乏,很多生活垃圾直接或者间接被弃入江、河、湖泊之中,致使江、河、湖泊的水面上经常漂浮大量生活垃圾,部分区域如航运河道、发电站前池水污染特别严重,这些垃圾如果不及时清理,将会影响航道运行、发电机组正常运转。
另一方面,由于生活污水和工业废水大量排放,河水严重营养富集,导致水面出现了大量的浮游藻类,如不及时清理,将严重打破区域生态平衡。
为了清理这些水面漂浮垃圾,环保部门每年都要投入大量的人力、财力和物力,定时进行人工打捞。
现有的人工打捞工具均为捞勺、捞网或简单小型的打捞设备,致使人工打捞劳动强度大,工作效率低,缺乏灵活性,清理效果也不是很理想。
例如在清理河、湖水面的草生植物或是清理较大体积的垃圾时,会采用机械清理的方式,但几乎都是采用较大型机械,不仅浪费能源,而且还会产生二次污染,难以普及使用。
水是生命不可或缺的自然資源,治理水污染势在必行,因此设计一款清理人流较大的河流和湖上等一切有水域的地方的垃圾,实用性很强的水面垃圾清洁机器人是社会的需要。
(一)国、内外研究现状和发展动态目前,国内外对水面垃圾的清洁主要采用人工打捞和机械打捞两种方式。
人工打捞利用半舱式或甲板机动驳船,由环卫工人手持网兜站在甲板边上直接把垃圾捞上来,这种作业方式劳动强度大、工作环境恶劣、人身安全没有保障,不仅清理难度大、综合成本高,而且无法治理在大雨台风季节暴发的水葫芦等海域污染。
而机械打捞装置具有间断性、笨拙性、耗时性等明显缺点,并且会造成严重污染,无法适应小型河流、湖泊等水面垃圾清理的需要。
国内外在水面垃圾清理方面也有少数自动清理无人船(清洁机器人),但是船体小、垃圾收集量小、垃圾不能太大、续航时间有限。
国内的垃圾清理无人船太小,只能清理小体积较轻的漂浮物,动力不足,一次清理的时间和垃圾量都很有限,而且智能化程度低,基本上都是基于嵌入式系统,没有通用计算机平台,无法运行人工智能和复杂智能感知系统,例如没有用于复杂障碍探测和识别的激光雷达或者图像识别系统,无法在复杂河道中自主巡航和避障,因此只能算是初级无人船。
2000KW时,该模组散热量是15kW,综合考虑导热率、耐水压、价格因数和加工难度,最终选择铝板,但铝水冷板水压最高不能超过1MPa,因此要求供水水压范围为0.4~1MPa。
通过实测,煤矿井下供水水压范围0.8~3MPa之间,因此水冷输入端必须安装减压阀和安全阀,井下水质较差,还需安装过滤阀,防止水垢等堵塞水道。
3.3安全性设计采掘类负载,电机导线随设备列车伸缩运动,很容易被尖锐物体刮破。
因为导线长,变频器发生II次短路时,变频器保护有延时。
所以本项目中,在变频器中线上设置在线绝缘监视仪,实时检测检测整个系统的绝缘值。
在3.3KV系统中,国标规定绝缘电阻小于120KΩ报漏电故障,通过在线绝缘监视仪实时检测,可以将漏电绝缘提高到10MΩ,大大整个供电系统安全性。
4实验结果4.1模组水冷实验2000KW三组合变频器,在额定负载,水流量60LPM,近口水温25℃,模组V+W的水冷仿真实验,水冷基板最高温度48.8℃,温升23.8℃。
通过实际满载温升实验,与仿真结果一致。
4.2短路试验W-T1对中线短路的II次短路试验波形,CH3通道是IGBT 的集电极电流,CH4通道是Vce电压值,分析可知,最大电路电流4.72KA,半母线电压2600V,电压过冲值。
4.3整机实验整机实验包括水压实验、爆炸实验、耐潮实验、压频比实验、温升实验、EMC实验等,均通过了上海防爆站验证,取得了防爆合格证。
产品在小保当等多个煤矿得到应用,运行良好。
5结论3.3kV矿用组合高压防爆变频器,通过合理拓扑划分,可将主回路和控制回路进行模块化设计,使得单体、两组合和三组合变频器可以共用相同模块,简化了设计工作量,提高了生产效率,也方便了煤矿对设备的维护,整机布局合理、性能可靠,满足煤矿对高可靠性、无极调速和低频大转矩的要求。
参考文献[1]王志.矿用高压组合变频器设计[J].江西煤炭科技,2020,3.[2]李晓,王璁,屠幼萍.电机驱动用长电缆破坏机理分析及防护[J].电气传动,2014,44(4).[3]徐政,金立军,林秀剑,阳林,张胜锰.基于输出电抗器的PWM长线驱动系统反射过电压的抑制[J].机电工程,2016,(33)3.作者简介:吴世均(1980,11-),男,汉族,籍贯:四川简阳,职称:工程师,研究方向:电气自动化。

水面智能清扫机器人视觉的实现的开题报告一、选题背景随着城市建设和生活水平的不断提高,水域的保洁工作越来越重要。
目前市场上已经有许多水面清扫设备,但大多数都需要人工操作,效率较低,而且对环境造成污染。
因此,需要一种能够自动化清扫水面的机器人,可以大大提高清扫效率,减少人力成本和环境污染。
二、选题意义水面智能清扫机器人使用视觉技术实现自主清扫水面,可以有效地解决上述问题。
这种机器人可以对水面进行全方向扫描,快速判断清扫区域,并且可以自行避开障碍物。
这是一项高效,经济,绿色的水面清扫解决方案。
三、选题内容本文的主要内容是探讨水面智能清扫机器人视觉的实现。
采用视觉技术可以实现机器人对水面的自主识别和清扫。
视觉系统可用于机器人的路径规划,视觉传感器的目标跟踪和障碍物避开等。
本文的主要内容包括以下几个方面:1.设计并实现水面智能清扫机器人的视觉系统。
其中,机器人主要由底座、扫描器和处理单元组成。
底座是机器人的主体部分,负责机器人的移动和稳定。
扫描器是机器人的感知器,可以对水面进行全方位扫描。
处理单元是机器人的“大脑”,可以处理扫描器传来的数据并判断清扫区域。
2.利用计算机视觉方法,对机器人进行自主路径规划。
通过目标检测和跟踪技术,视觉系统可以确定清扫区域和障碍物,并规划出合理的路径。
3.利用机器学习方法,对机器人进行目标分析和识别。
机器人具备自主分析和识别清扫的目标物,提高清扫效率。
四、预期成果通过本文的研究,成功实现水面智能清扫机器人视觉的实现,并且采用计算机视觉和机器学习技术实现机器人的自主路径规划和目标识别能力。
最终,达到提高水面清扫效率,减少人力成本和环境污染的目的。
五、研究方案(1)设计并实现水面智能清扫机器人的视觉系统。
其中,机器人主要由底座、扫描器和处理单元组成。
底座是机器人的主体部分,负责机器人的移动和稳定。
扫描器是机器人的感知器,可以对水面进行全方位扫描。
处理单元是机器人的“大脑”,可以处理扫描器传来的数据并判断清扫区域。
哈尔滨工业大学研制出可在水上行走的微型机器人
佚名
【期刊名称】《机械工程师》
【年(卷),期】2011(000)009
【摘要】水黾(water strider)是一种长腿的昆虫,能够在池塘、湖和其他水路的表面迅速奔跑.由哈工大化工学院潘钦敏副教授领导的研究人员开发出一种可以在水面上行走的微型机器人,具有像水黾一样的水上行走能力.在军事侦察、水污染监测等领域具有广阔应用前景.有关研究成果已经刊登在美国《应用材料与界面》( ACS Applied Materials& Interfaces)杂志上.
【总页数】1页(P17)
【正文语种】中文
【相关文献】
1.美国科学家研制出可在沙地上行走的机器人 [J], 锋格
2.中国科学家研制出“水上漂”微型机器人 [J],
3.美研制出可在水上行走的微型机器人 [J],
4.美国科学家研制出可在沙地上快速行走的机器人 [J],
5.胶囊可在体内“行走” 美研制出纳米级胶囊 [J], 毛黎
因版权原因,仅展示原文概要,查看原文内容请购买。
夸水面清洁机器人的四个字我是焦博士,我在研究一种高科技产品——“清洁工机器人”。
“清洁自动化”已经不再遥远,只要在“清洁工机器人”的“头脑”中放入一张清洁卡片,它就可以立刻把垃圾处理掉,让城市变得更干净。
它存有一个长方形的头。
一个椭圆形的身体上存有十几个大洞,里面可以张开一些打扫卫生的工具,随时可以打扫卫生。
头上存有两根天线,可以接受任务,也可以感应器哪里存有垃圾,就可以立刻回去处置掉。
它除了一双能干的手,可以制止人乱丢垃圾。
它存有一双多智龙的脚,这双脚可以变为浮力球﹑滑轮等等。
使用时,只要把清洁卡插入,发出命令就行了。
可是,如果没有电,它们是要“罢工”的能不能让机器人自己充电呢?我正在研究这样的机器人,它们只要“吃”地上的垃圾就可以干活,这种机器人的肚子里,如果装了特殊的电池,就可以把吃进去的垃圾变成气,再把气变成电。
有了这种吃垃圾的机器人,在城市里,这些机器人只要“吃”人们丢在地上的垃圾,就能不停的工作。
不懈努力提缔造等同于顺利,我们一起回去发明者﹑缔造吧!现在,人们制造的垃圾数量非常多,垃圾一多便会对空气、土壤造成严重的污染。
即使清洁工们每天早出晚归但仍没有办法清理完这么大量的垃圾。
所以,我要发明一种机器人,叫“清理垃圾机器人”。
这种机器人协助清洁工打扫卫生。
机器人每天都得很早回去吃饭帮忙清洁工减低了许多经济负担。
可是,清洁工们仍不太令人满意,因为机器人只要一坏掉,他们就可以“大罢工”的。
你可以想要,可以用电池啊。
但是,太麻烦了,每天都得给机器人换电池,即为浪费钱又浪费资源。
这使这些清洁工又已经开始伤脑筋了。
经过我的改建,使这些清洁工机器人拎太阳能控制器,如果机器人没有电的话,控制器上就可以发生红灯,也可以说道::“坏掉了,坏掉了。
”控制器上存有一个插头,这个插头就是相连接机器人电池系统的。
只要机器人一坏掉把控制器塞入机器人,控制器里储存的太阳能就可以为机器人提供更多能量了,这样机器人就有点了。
新型水上垃圾清理机器人——Waste Vortex
汪利洋
【期刊名称】《军民两用技术与产品》
【年(卷),期】2017(000)006
【摘要】设计的此款新型水面垃圾清理机器人针对的是封闭水域(如景区湖泊,池塘等)和一些水流缓和的开阔水域(如河流,港口,中小型水库等)的漂浮垃圾问题.机器人巧妙地结合了漩涡和网筛的工作原理,通过在水面形成一个人造"漩涡",高效地分离并收集水中难以打捞的漂浮物,解决了目前水上垃圾清理设备不能清理的小型垃圾的问题.全机以电能驱动,安装了太阳能电池板和超级电容作为电力的产生和存储装置,为水下推动器和水泵的正常工作提供可靠的动力.机器人采用了激光雷达避障的技术,使其在水面作业和巡逻的安全性得到保障;其主体的设计参考了双体船的流线型结构,能承受较大的风浪.
【总页数】2页(P114-115)
【作者】汪利洋
【作者单位】兰州理工大学,兰州 730050
【正文语种】中文
【相关文献】
1.新型水上救援机器人设计研究 [J], 滑玉辉;滑玉卿
2.一种新型水上清洁机器人的设计与实现 [J], 曹志强;师忠秀
3.基于arm的水上垃圾清理机器人设计方法 [J], 华洵;曹雪花
4.水上垃圾清理机器人 [J], 陈华勇;方鼎;洪锟;肖云永;王立强;邓成钢
5.一种仿水黾新型水上行走机器人的研究 [J], 张兆隆;高铁红;高勇
因版权原因,仅展示原文概要,查看原文内容请购买。
一种水面漂浮物自动清理机器人结构设计史浩辉;李莉莉;付宗国;罗准;官俊【摘要】为了解决传统的垃圾打捞船难以解决的小型水面悬浮物的问题,提出一种利用“漩涡”和网筛工作原理,并以太阳能为新能源的一种水面漂浮物清理机器人的设计方案.实现对水体的“二次清理”,也可在水面航行过程或在静止在某固定点完成垃圾的收集,方便灵活.【期刊名称】《机械工程师》【年(卷),期】2019(000)001【总页数】3页(P110-112)【关键词】新能源;机器人;网筛过滤;环保设备【作者】史浩辉;李莉莉;付宗国;罗准;官俊【作者单位】浙江海洋大学船舶与机电工程学院,浙江舟山316022;浙江海洋大学船舶与机电工程学院,浙江舟山316022;浙江海洋大学船舶与机电工程学院,浙江舟山316022;浙江海洋大学船舶与机电工程学院,浙江舟山316022;浙江海洋大学船舶与机电工程学院,浙江舟山316022【正文语种】中文【中图分类】TP242.30 引言当前国内外对于封闭或小型水域垃圾清理研究较少,水上垃圾清理主要以人工清理为主。
虽然目前国内外所开发出的垃圾清理船种类繁多,作用原理也不一而足,但它们大都是定位于江、河、湖、海等大面积水域的垃圾清理,而且只能对于水中的较大体积的漂浮物进行清理,而对于水中较小的悬浮垃圾却是束手无策,不能对水体的清洁作进一步的处理。
本文设计了一种水面漂浮物自动清理机器人,不仅可以清理较大体积漂浮物,而且可以清理水面小型的悬浮物(如浮萍、藻类、果皮等)[1],解决了传统的垃圾打捞船难以解决的小型水面悬浮物的问题。
1 水面漂浮物清理机器人1.1 水面机器人主要结构水面漂浮物自动清理机器人,包括船体及船体的前后两侧分别设置的前阀门和后阀门,且船体中设有网筛。
船体的内部为用于放置网筛的主舱室、船体前舱、船体后舱、片体内隙、船舱侧隙组成;前舱阀门的启闭型式为滑移式,并且船体前舱和船体后舱通过船舱侧隙连接。
船体底部安装有斗状套筒,斗状套筒末端与水泵进水口相连;在水泵出水口安装电磁阀,在船体底部后侧对称安装两个水下推进器;且水下推进器上都设有推进器螺旋桨。
智能型水面垃圾清理机器人控制系统的设计与研究目录1. 内容概括 (3)1.1 研究背景 (3)1.2 研究目的与意义 (5)1.3 论文结构概述 (6)2. 文献综述 (7)2.1 机器人技术概述 (8)2.2 水面垃圾清理需求与现状 (9)2.3 机器人控制系统设计方法及特点 (11)2.4 相关研究成果与经验 (12)2.5 未来研究方向与趋势 (13)3. 系统需求分析 (15)3.1 功能需求 (16)3.2 性能指标 (17)3.3 设计限制与约束 (18)4. 系统总体设计 (19)4.1 机器人的硬件架构 (20)4.2 软件架构选型 (22)4.3 数据采集与处理 (24)4.4 控制系统核心模块设计需求 (25)5. 核心模块详细设计与实现 (26)5.1 图像处理与识别模块 (28)5.2 自主导航与路径规划模块 (29)5.3 垃圾抓取与运输模块 (30)5.4 避障与杨烤盘上情景应对模块 (31)5.5 能量管理与充电模块 (32)6. 系统集成与测试 (34)6.1 硬件集成实施 (35)6.2 软件集成开发与测试平台 (37)6.3 接口与通信协议测试 (38)6.4 整体系统集成测试与仿真验证 (39)7. 结果与讨论 (41)7.1 实验结果分析 (43)7.2 性能测试评估指标 (44)7.3 故障分析与改进 (45)7.4 用户反馈与后续优化建议 (47)8. 结论与展望 (48)8.1 总结研究主要贡献 (49)8.2 系统应用的实际效果 (50)8.3 未来研究方向与科学建议 (51)1. 内容概括随着城市化进程的加速和人类生活水平的提高,水环境污染问题愈加严峻。
水面垃圾污染尤为突出,严重影响着生态环境和人们生活质量。
针对水面垃圾清除需求,本论文设计并研究了一套智能型水面垃圾清理机器人控制系统。
该系统集成了多传感器数据融合、路径规划、控制算法以及垃圾识别技术,实现了智能化自动清除水面垃圾的功能。
海底清洁机器人作文
随着海水上垃圾越来越多,海水中的小鱼受到危害,为了保护它们,我准备发明一种新型武器--海上垃圾机器人。
海上垃圾机器人的头上有一个涡轮增压加速器,可以在海水中快速行走。
肚子上是一个电脑液晶显示屏,可以让地面上的人们更加清晰的看到海水中的微生物,还可以把垃圾再回收到肚子里。
手像是两只大钳子,可以把垃圾钳回再放到肚子里,在这个操作过程中,如果不小心抓到小鱼,可以把它放回海水中。
它的脚底下有两个小轮子,可以在海底行走,还能成功的避开海底的小珊瑚。
海上垃圾机器人不仅可以回收海里的垃圾,它还可以释放氧气,让海水里的氧气变得越来越多,让海鱼们在大海里自由自在的遨游。
你看,这就是海上垃圾机器人!。
机器人自动上下水模块原理
机器人自动上下水模块是一种能够使机器人能够在水中自由行动的模块。
它具有以下原理:
1. 水密封设计:机器人自动上下水模块采用了水密封设计,确保机器人在水中工作时不会进水。
这样可以保护机器人的内部电路和零件不受水的侵蚀,延长机器人的使用寿命。
2. 浮力控制:机器人自动上下水模块通过控制浮力来实现在水中的上浮和下潜。
通过增加或减小浮力,机器人可以在水中上升或下沉,实现自由移动。
3. 推进系统:机器人自动上下水模块还配备了推进系统,用于驱动机器人在水中前进、后退或转向。
推进系统通常采用螺旋桨或水轮等设计,通过推动水流来产生推进力,从而推动机器人的运动。
4. 传感器和控制系统:机器人自动上下水模块还配备了各种传感器和控制系统,用于感知周围的水环境和控制机器人的运动。
传感器可以检测水的深度、温度和水质等参数,帮助机器人做出相应的动作。
控制系统则负责根据传感器的反馈信息来控制浮力和推进系统,使机器人能够在水中平稳、灵活地移动。
通过这些原理,机器人自动上下水模块能够使机器人在水中自由行动。
它可以应用于水下勘探、海洋科学研究、水下救援等领域,为人类提供更多的便利和帮助。
随着技术的不断发展,相信机器人自
动上下水模块将会越来越智能和先进,为人类创造更多的可能性。