第五章 条件平差
- 格式:ppt
- 大小:2.53 MB
- 文档页数:65

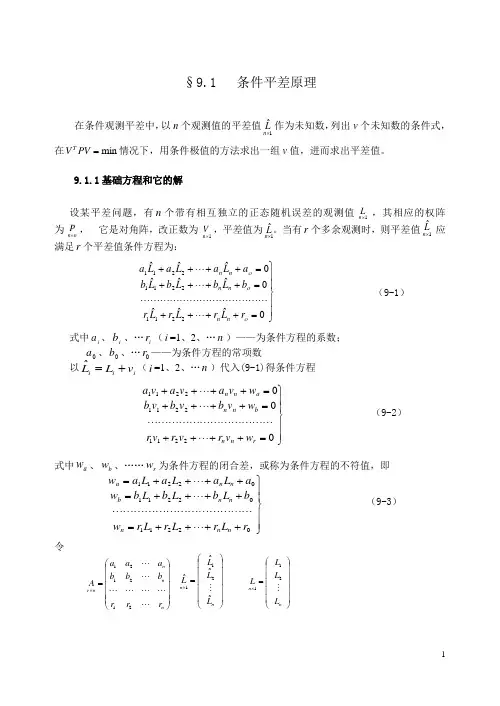
§9.1 条件平差原理在条件观测平差中,以n 个观测值的平差值1ˆ⨯n L 作为未知数,列出v 个未知数的条件式,在min =PV V T 情况下,用条件极值的方法求出一组v 值,进而求出平差值。
9.1.1基础方程和它的解设某平差问题,有n 个带有相互独立的正态随机误差的观测值 ,其相应的权阵为 , 它是对角阵,改正数为 ,平差值为 。
当有r 个多余观测时,则平差值 应满足r 个平差值条件方程为:⎪⎪⎭⎪⎪⎬⎫=++++=++++=++++0ˆˆˆ0ˆˆˆ0ˆˆˆ221122112211οοοr L r L r L r b L b L b L b a L a L a L a n n n n n n (9-1) 式中i a 、i b 、…i r (i =1、2、…n )——为条件方程的系数;0a 、0b 、…0r ——为条件方程的常项数以ii i v L L +=ˆ(i =1、2、…n )代入(9-1)得条件方程(9-2)式中a w 、b w 、……r w 为条件方程的闭合差,或称为条件方程的不符值,即(9-3) 令⎪⎪⎪⎪⎪⎭⎫⎝⎛=⨯n n n n r r r r b b b a a a A212121⎪⎪⎭⎪⎪⎬⎫++⋅⋅⋅++=++⋅⋅⋅++=++++=022110221102211r L r L r L r w b L b L b L b w a L a L a L a w n n n n n b n n a ⎪⎪⎭⎪⎪⎬⎫=++⋅⋅⋅++=++⋅⋅⋅++=++⋅⋅⋅++000221122112211r n n b n n a n n w v r v r v r w v b v b v b w v a v a v a ⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯n n L L L L 211⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯n n L L L L ˆˆˆˆ2111⨯n L nn P ⨯1⨯n V 1ˆ⨯n L 1ˆ⨯n L则(9-1)及(9-2)上两式的矩阵表达式为0ˆ0=+A LA (9-4) 0=+W AV (9-5)上改正数条件方程式中V 的解不是唯一的解,根据最小二乘原理,在V 的无穷多组解中,取PV V T = 最小的一组解是唯一的,V 的这一组解,可用拉格朗日乘数法解出。

第五章条件平差习题第五章思考题参考答案5.1(a)n=6,t=3,r=3(b)n=6,t=3,r=3(c)n=14,t=5,r=95.2(a)n=13,t=6,r=7共有7个条件方程,其中有5个图形条件,2个极条件。
(b)n=14,t=8,r=6共有6个条件方程,其中有3个图形条件,3个极条件。
(c)n=16,t=8,r=8共有8个条件方程,其中有6个图形条件,2个极条件。
(d)n=12,t=6,r=6共有6个条件方程,其中有4个图形条件,1个圆周条件,1个极条件。
5.3n=23,t=6,r=17共有17个条件方程,其中有9个图形条件,1个圆周条件,1个固定角条件,1个固定边条件,5个极条件。
5.4 (1)n=22,t=9,r=13:7个图形条件,1个圆周条件,2个极条件,2个边长条件,一个基线条件。
(2)12837941314121520111718195610166101119910111213510ˆˆˆ1800ˆˆˆ1800ˆˆˆ1800ˆˆˆ1800ˆˆˆˆ1800ˆˆˆˆ1800ˆˆˆˆ1800ˆˆˆˆˆ1800ˆˆˆsin sin sin L L L L L L L L L L L L L L L L L L L L L L L L L L L L L L L L ++-=++-=++-=++-=+++-=+++-=+++-=++++-=171961116203614184715192211151217121318124ˆsin 1()ˆˆˆˆsin sin sin sin ˆˆˆˆsin sin sin sin 1()ˆˆˆˆsin sin sin sin ˆˆ()ˆˆˆˆsin sin sin sin ˆˆ(ˆˆˆˆsin sin sin sin FG FG L L L L L L L L L L L L L S S S S L L L L S S L L L L ===→=以大地四边形中心为极以中点四边形D 点为极的边长条件1213611891719ˆˆ)ˆˆˆˆsin sin sin sin ˆˆˆˆsin sin sin sin FG AB S S L L L L S S L L L L →=的边长条件(基线条件)5.5 n=8,t=4,r=4;有多种条件方程的列法,其中之一为:1001000100110000120001001104000011014V ⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥-=⎢⎥⎢⎥--⎢⎥⎢⎥---⎣⎦⎣⎦(注意常数项单位为mm ) 5.6 (1)P=3/2,(2)P=15.7 (1)P B =1.6,P C =2.1,P D =2.1,P E =1.6(2)P hCD =1.85.8 []ˆ 2.4998 1.9998 1.3518 1.8515h=2P σ=0.32(mm)5.9 1234561110009100110900101016V V V V V V ⎡⎤⎢⎥⎢⎥-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎢⎥⎢⎥⎢⎥⎣⎦ []045452TV mm =---[]ˆ 1.576 2.219 3.7950.867 2.443 1.352T h m =--- 5.10 (1)1ˆ10.3556h m = 2ˆ15.0028h m = 3ˆ20.3556h m = 4ˆ14.5008h m =5ˆ 4.6472h m = 6ˆ 5.8548h m = 7ˆ10.5020h m =(2)±2.2mm。
第五章条件平差§5-1条件平差原理条件平差中求解的未知量是什么?能否由条件方程直接求得5. 1. 02 设某一平差问题的观测个数为n.必要观测数为t,若按条件平差法进行平差,其条件方程、法方程及改正数方程的个数各为多少?5. 试用符号写出按条件平差法平差时,单一附合水准路线中(如图5-1所示)各观测值平差值的表达式。
图5-15. 1. 04 在图5-2中,已知A ,B的高程为Ha = m , Hb=11. 123m,观测高差和线路长度为:图5-2S1=2km,S2=Ikm,S3=,h1=,h2= m,h3= m,求改正数条件方程和各段离差的平差值。
在图5-3的水准网中,A为已知点B、C、D为待定点,已知点高程HA=,观测了5条路线的高差:h1=,h2=0. 821 m,h3=,h4=,h5= m。
各观测路线长度相等,试求:(1)改正数条件方程;(2)各段高差改正数及平差值。
有水准网如图5-4所示,其中A、B、C三点高程未知,现在其间进行了水准测量,测得高差及水准路线长度为h1=1 .335 m,S1=2 km;h2= m,S2=2 km;h3= m,S3=3km。
试按条件平差法求各高差的平差值。
如图 5-5 所示,L1=63°19′40″,=30″;L2=58°25′20″,=20″;L3=301°45′42″,=10″.(1)列出改正数条件方程;(2)试用条件平差法求∠C的平差值(注: ∠C是指内角)。
5-2条件方程5. 对某一平差问题,其条件方程的个数和形式是否惟一?列立条件方程时要注意哪些问题?如何使得一组条件方程彼此线性无关?. 10 指出图5-6中各水准网条件方程的个数(水准网中P i表示待定高程点,h i表示观测高差)。
(a) (b)图5-65. 2. 11指出图5-7中各测角网按条件平差时条件方程的总数及各类条件的个数(图中P i 为待定坐标点)。
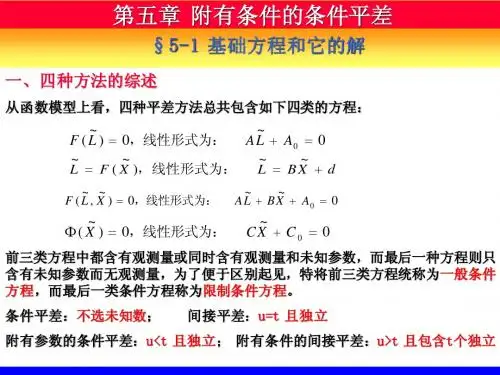
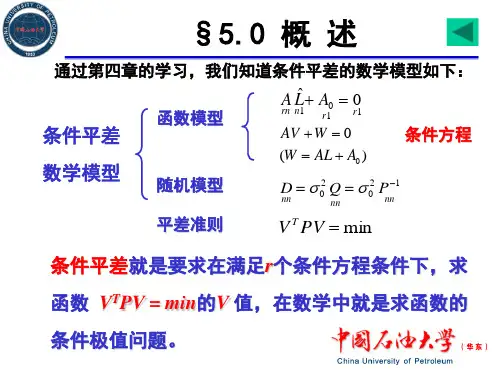
测量平差太原理工大学测绘科学与技术系第五章附有限制条件的条件平差附有限制条件的条件平差§5-1 基础方程和它的解§5-2 精度评定§5-3 各种平差方法的共性和特性§5-4 平差结果的统计性质§5-1 基础方程和它的解条件平差、附有参数的条件平差、间接平差、附有条件的间接平差等四种经典平差方法,除条件平差不增选参数外,其它三种方法都要增选数量不等的参数参与平差,其未知参数的个数分别是u<t,u=t,u>t,且要求参数间彼此独立,在u>t 的情况下,也要求必须包含t个独立参数,从函数模型上看,四种平差方法总共包含如下四类的方程:基础方程和它的解前三类方程中都含有观测量或同时含有观测量和未知参数,而最后一种方程则只含有未知参数而无观测量,为了便于区别起见,特将前三类方程统称为一般条件方程,而最后一类条件方程称为限制条件方程。
~0)~(0=+=A L A L F ,线性形式为:dX B L X F L +==~~)~(~,线性形式为:0~~0)~,~(0=++=A X B L A X L F ,线性形式为:0~0)~(0=+=ΦC X C X ,线性形式为:基础方程和它的解在第二章中介绍过附有条件的条件平差的模型建立方法,该方法也要增选u 个参数,方程的总数为r+u 个。
如果在u 个参数中有s 个是不独立的,或者说在这u 个参数中存在着s 个函数关系式,则建立平差模型时应列出s 个限制条件方程,除此之外再列出c=r+u-s 个一般条件方程,因此方程总数也可以认为是c+s 个,形成如下的函数模型若为线性形式,则为0)~,~(1=⨯X L F c 0)~(1=Φ⨯X S 0~~1011=++⨯⨯⨯⨯⨯c u u c n n c A X B L A 0~101=+⨯⨯⨯s u u s C X C基础方程和它的解无论线性模型还是非线性模型,按照第二章介绍的线性化方法和结论,并考虑到则可写出其线性化后的函数模型为以和的估值和代入上式,则∆+=L L ~x X X ~~0+=0~111=-+∆⨯⨯⨯⨯⨯c u u c n n c W x B A 0~11=-⨯⨯⨯s x u u s W x C ∆x ~V x ˆ0ˆ111=-+⨯⨯⨯⨯⨯c u u c n n c W x B V A 0ˆ11=-⨯⨯⨯s x u u s W xC基础方程和它的解式中以上式作为函数模型而进行的平差,称为附有限制条件的条件平差,有的文献也称其为概括平差函数模型。