六足步行机器人的毕业设计说明书
- 格式:doc
- 大小:1.04 MB
- 文档页数:62
六脚柱状爬行机器人第一章准备安装机器人必需的工具下面是安装该机器人时需要的工具:●螺丝刀●钻子●1/8英寸钻头●小活动扳手或套筒扳手●剪线钳●少量的白色油脂或类似的润滑油柱状机器人套件装箱清单全套柱状机器人包含下面的元器件:电子/电器类:●1个BASIC Stamp 2 控制器●1块USB接口的教学板●12个型号为HiTec HS-322HD 伺服电机●一根USB连接线●1个USB电机控制器●4条6英寸电机延长线铝质部件:●1根主梁(Channel)●6个电机固定支架(Servo Holders)●6个腿部活动关节(Leg Actuators )●6个活动关节支撑件(Leg Actuator Supports)●6个腿部的前半部分(Front Legs)●6腿部的后半部分(Rear Legs)●6电机支架(Servo Brackets)●4个电路板支架(Circuit board brackets)螺母、螺钉、垫圈和螺杆●12个#2 弹垫●28个#4-1/4英寸螺钉●12个#4-3/8英寸螺钉●6个#4-7/16英寸螺钉●6个#4-1/2英寸螺钉●6个#4-1/4尼龙取间支柱●40个#4螺母●15个#4锁紧螺母●40个# 4弹垫●3个#4-1.50螺钉●6个#4垫圈●24个#6-3/8英寸螺钉●24个#6弹垫●24个#6螺母●6个#8-1.5英寸螺钉●6个#8锁紧螺母●12个#8平垫●6个#8-9/16英寸尼龙取间支柱●6个#8-7/16英寸尼龙取间支柱●12个1/4SAE平垫其他●机器人手册●6个2/56英寸螺杆●6个橡胶脚●12个圆头塑料连接件●12个球形连接头●12条扎带你自己需要准备的东西和装配其他机器人一样,完成六脚柱状爬行机器人需要你自己提供一些额外的工具:●输出电压为5-7.2V的镍肽电池或镍膈电池为电机供电。
它为输出电流在1800mAH到3300mAH的标准电池组合,通常用在无线遥控车上。
燕山大学本科毕业设计(论文)文献综述课题名称:学院(系):年级专业:学生姓名:指导教师:完成日期:一、课题国内外现状步行机器人,简称步行机 ,是一种智能型机器人 , 它是涉及到生物科学 , 仿生学 , 机构学 , 传感技术及信息处理技术等的一门综合性高科技 . 在崎岖路面上 ,步行车辆优于轮式或履带式车辆 .腿式系统有很大的优越以及较好的机动性 , 崎岖路面上乘坐的舒适性 ,对地形的适应能力强 .所以 ,这类机器人在军事运输 , 海底探测 , 矿山开采 , 星球探测 , 残疾人的轮椅 , 教育及娱乐等众多行业 ,有非常广阔的应用前景 , 多足步行机器人技术一直是国内外机器人领域的研究热点之一。
步行机器人历经百年的发展, 取得了长足的进步, 归纳起来主要经历以下几个阶段[5]:第一阶段, 以机械和液压控制实现运动的机器人。
第二阶段, 以电子计算机技术控制的机器人。
第三阶段, 多功能性和自主性的要求使得机器人技术进入新的发展阶段。
闰尚彬,韩宝玲,罗庆生针对仿生六足步行机器人关节较多,其步态轨迹规划和关节控制量计算都较为复杂的现状,采用Solidworks软件与MSC.ADAMS 软件相结合的方式对六足仿生步行机器人的样机模型进行了运动学仿真与分析.通过仿真,验证了所设计的三角步态的适用性和所选择的三次样条曲线作为机器人足端点轨迹曲线方案的可行性.韩宝玲王秋丽罗庆生基于六足仿生步行机器人机构学特性的研究,采用数值分析法求解了机器人步行足的足端工作空间,利用虚拟样机技术计算了机器人的灵活度,从两方面综合衡量六足仿生步行机器人的工作能力,并以六足步行机器人各腿节比例关系的确定为例,介绍了六足步行机器人结构优化的具体方案.苏军陈学东田文罡研究六足步行机器人全方位行走步态,分析其静态稳定性;规划了典型直线行走步态和定点转弯步态,确定了直线行走步态最大跨步和定点转弯步态最大转角;进行了步态控制算法模拟仿真及实地步行实验。
目录1 引言1.1新型六足机器人研究目的和意义 (1)1.2新型六足机器人研究概况及发展趋势 (1)1.3课题研究内容 (2)2 机械结构与芯片简介2.1机器人机械结构 (3)2.2机器人运动原理 (3)2.3驱动装置选择 (5)2.4机器人实物图 (6)2.5硬件结构介绍 (7)2.6单片机芯片介绍 (8)2.7编码解码芯片介绍 (13)3 控制系统结构设计3.1上位机控制 (16)3.1.1 程序语言及串口通讯 (16)3.1.2 人机交互界面 (17)3.2 基于无线的智能控制 (19)3.2.1 无线发射模块 (19)3.2.2 无线接收模块 (23)4 结论 (29)参考文献 (30)致谢 (31)新型六足机器人1 引言1.1新型六足机器人研究目的和意义本文六足机器人是一种基于仿生学原理研制开发的新型足式机器人。
新型机器人比传统的轮式机器人有更好的移动性,它采用类拟生物的爬行机构进行运动,自动化程度高,具有丰富的动力学特性。
此外,足式机器人相比其它机器人具有更多的优点:它可以较易地跨过比较大的障碍(如沟、坎等),并且机器人足所具有的大量的自由度可以使机器人的运动更加灵活,对凹凸不平的地形的适应能力更强;足式机器人的立足点是离散的,跟地面的接触面积较小,因而可以在可达到的地面上选择最优支撑点,即使在表面极度不规则的情况下,通过严格选择足的支撑点,也能够行走自如。
因此,足式步行机器人的研究已成为机器人学中一个引人注目的研究领域,由于六足机器人强大的运动能力,可以提供给运动学、仿生学和机械构造原理研究有力的工具[1]。
在研究昆虫运动方式、关节承力、稳定姿态调整的过程中,可以运用本机器人对设想的虫体姿态、运动过程进行模拟,最大程度地接近真实,将理论和实践联系起来,从而更好地观察昆虫运动模式的优点,以及探究哪些现象能够运用到机械设计的实践中去。
这对于以上学科的研究和探索都是十分有意义的。
当然,我们还可以作为教学器械,通过研究昆虫爬行时各脚的运动情况,用机械形式表达出来,也可以作为仿生玩具及探险、搜救设备,还可以进入细小管道、地洞中勘察。
目录插表清单 (III)插图清单 .................................................................................................................................................................... I V 第一章绪论 . (1)1.1机器人的发展历史 (1)1.2机器人的定义和基本组成 (2)1.2.1机器人的定义 (2)1.2.2机器人的基本组成: (2)1.3移动机器人概述 (3)1.4移动机器人分类 (3)1.5多足机器人的发展现状 (5)1.6本设计的主要工作 (7)1.7本章小结 (7)第二章六足仿生机器人的结构分析及设计 (8)2.1“六足纲”昆虫的运动原理 (8)2.1.1步态的参数描述 (8)2.1.2三角步态运动原理 (9)2.2六足仿生机器人机械结构分析 (9)2.3本章小结 (10)第三章六足仿生机器人的步态分析和设计 (11)3.1六足步行机器人坐标定义 (11)3.2六足机器人的稳定性分析 (13)3.3.1 稳定性分析 (13)3.3.2稳定裕量计算 (13)3.4六足仿生机器人的直线运动步态设计 (15)3.4.1步态规划 (15)3.4.2步态动作分析 (15)3.5“三角步态”定点转弯步态设计 (18)3.6本章小结 (20)第四章六足仿生机器人的控制系统设计 (21)4.1功能分解 (21)4.2控制系统的硬件设计 (22)4.2.1微处理器AT89S52简介 (22)4.2.2 舵机模块设计 (23)4.2.3 避障模块设计 (24)4.3控制系统软件设计 (26)4.3.1单个舵机控制方法 (27)4.3.2多舵机控制 (31)4.3.3六足仿生机器人全方位步态程序设计 (36)4.4软件的抗干扰及可靠性设计 (39)4.5本章小结 (40)第五章软硬件联调 (41)5.1K EIL C51开发系统基本知识 (41)5.2P ROTEUS 仿真软件基本知识 (41)5.2.1 Proteus介绍 (41)5.2.2 Proteus的仿真 (42)5.2.3 Proteus PCB (42)5.3调试结果 (42)5.2相关数值测试 (43)5.3本章小结 (44)第六章结束语 (45)6.1论文总结 (45)6.2论文写作的感想 (45)6.3本章小结 (45)参考文献 (46)致谢辞 (47)表 1-1机器人Fred Delcomyn的参数 (6)表 2-1 本设计机器人相关参数 (9)表 4-1 I/O引脚分配表 (23)表4-2 时基脉冲与舵机角度对应表 (24)表 4-2 探测障碍物的传感器与单片机引脚对应关系表 (25)表 4-3舵机与六足机器人足对应关系表 (36)表 4-4 舵机与单片机端口的对应关系表 (36)表 5-1 关系数值表 (44)图 1-1Fred Delcomyn六足仿生机器人 (6)图 1-2Gengh机器人 (6)图 1-3 DRROB系列高级机器人 (7)图 2-1 本设计的六足仿生机器人 (10)图 2-2机器人腿部实物 (10)图 3-1腿部组图简图 (11)图 3-2 机器人腿部坐标示意图 (12)图 3-3 腿部简图 (12)图 3-4步行机器人任一时刻姿态图 (13)图 3-5三角步态稳定图 (14)图 3-6 六足步态示意图 (15)图 3-7(A、B、C、D)定点转弯步态示意图 (16)图 4-1 基本功能框图 (21)图 4-2 PDIP封装图 (23)图 4-3微动开关示意图 (25)图 4-4 微动开关安装位置图 (25)图 4-5 硬件设计仿真图 (26)图 4-6 系统软件的总体流程 (27)图 4-7 舵盘的位置线性变化图 (28)图 4-8 舵机的控制脉冲图 (28)图 4-9 控制脉冲程序流程图 (29)图 4-10 8路信号舵机控制脉冲图 (31)图 4-11 12个舵机控制流程图 (33)图 4-12 舵机位置示意图 (36)图 4-13 直行程序流程图 (37)图 4-14 转弯程序流程图 (38)图 4-15 避障程序流程图 (39)图 5-1 硬件仿真结果图 (44)第一章绪论机器人的应用越来越广泛,几乎渗透到人们生活的各个领域。
毕业设计 [ 论文 ]题目:六脚爬虫机器人运动步态规划和控制系统搭建2011 年6 月9日毕业设计开题报告六脚爬虫机器人运动步态规划和控制系统搭建1课题来源本课题是受深圳德普施公司委托,为其研发第二代六脚爬虫机器人。
2课题研究的目的和意义随着世界科技的发展和人们生活水平的提高,机器人无疑将成为未来世界的宠儿。
机器人可以代替人类完成重复性和枯燥的任务,可以为人类服务,也可以到人类不能去的危险区域探索作业。
鉴于此,我们有必要加大对机器人领域的研究,去开发多功能的,环境适应性强的新一代机器人。
目前,在地面上能独立行进完成相应功能的机器人主要有两类,一种是由轮子驱动的轮行机器人,另一种是基于仿生学的步行机器人。
尽管轮行机器人在平坦地面上行进稳定,速度快,效率高;但其最大的不足就在于对未知的复杂地形,其适应能力很差。
而步行机器人可以在复杂的自然地形中较为容易的完成前进和探测。
所以针对军事侦察,危险区域作业,星球探测,矿山开采,教育娱乐等地面环境不确定性大的领域,步行机器人有更广阔的应用前景和更高的实用价值。
而在步行机器人中,多足机器人是最容易实现稳定行走的。
由于六足机器人相对类人和四足机器人具有控制系统简单、肢体冗余和行走平稳等优点,本课题我们选择制作一个模仿昆虫肢体结构和运动控制策略的六足机器人。
为了适应复杂多变的自然环境,在昆虫身上进化出成百上千的感应器来感测环境信息。
本课题也试图在机器人身上安装各种传感器来感测外部环境,让机器人可以在未知的,复杂的环境中行走,完成一定的任务。
当然,试图实现昆虫所有感测功能是不现实的,我们只是模拟其一部分功能。
同时,为了增强机器人的实用性,我们提供了另外两种控制方法,即触摸屏控制和无线控制。
本课题作为机器人设计的一部分,其目的是对六足仿生机器人的控制方法和步态策略进行研究,针对一个六足仿生机器人的本体设计新型的控制系统硬件,并尝试用触摸屏去显示机器人的状态和控制机器人的步态。
摘要本文介绍了一种应用两个电机驱动的六足式步行机器人,并对该机器人的运动机理与步态进行了分析,经样机实验,所设计的机器人可实现前进、后退、遇障转弯等功能,具有结构简单,控制便捷,行走稳定的特点。
基于仿生学原理,应用连杆机构学中的Robert原理,设计出一连杆轨迹能较好地近似于机器人理想足部轨迹的四杆机构,选择足部运动曲线并在图谱上找到该曲线,以确定四杆机构的各个参数。
由参数和电动机的输出转矩就能确定足部的线速度和加速度。
并通过PRO/E软件,对用这一连杆机构作为腿部机构的六足机器人进行了前进和转弯步态建模,并对它进行了稳定裕量分析,包括静力学分析和动力学分析。
针对这种腿部结构设计了六足的行走方式,通过对12个步进电机的控制,采用三角步态,实现了六足机器人的直行功能。
仿真及试验证明,这种结构能较好地维持六足机器人自身的平衡,并且对今后更深入地研究六足机器人抬腿行走姿态及可行性,具有较高的参考价值。
关键词:六足机器人;行走步态;运动原理;稳定性;四杆机构abstractThis paper introduced a six-legged walking robot propelled by two electromotors,and analyzed the robot's kinetic mechanism and walking style.Proved by the model test,the robot is capable of actions such as forwarding,backwarding and veering in the case of obstruction.The robot demonstrates such advantages as simple structure,comfortable control and stable performance of pacing.Based on the principle of bionics,this paper designs a four-linked mechanism using Robert principle,which can approximate the ideal trace of robot's leg ,choose the sport curve of the foot department, then check to find out that curve on the diagram, the old ability but locations can make sure four each parameters of the pole structure, can make sure the line speed and accelerations of the foot department from the exportation dint of the parameter and electric motor. Some simulations about the hexapod robot which uses the six-linked mechanism as its leg are made,and carried on the stability to it analysis, include the quiet mechanics analysis and dynamics analysis.A hexapod walking mode was designed according to this structure.By controlling 12 step motors straight walking function of the hexapod robot has been implemented with tripod gait movement.Simulation and experiment show that this structure can keep the hexapod robot body's balance better,providing high reference value to research the advantage and feasibility of leg-raising walking gesture.Keyword: six foot robot; Tread the appearance of walk; The sport principle; Stability; Four pole organizations目录摘要 (I)abstract .............................................................................................................. I I 1 绪论. (1)1.1国内外机器人的研究现状 (1)1.2机器人的主要研究问题 (3)1.3机器人的发展趋势 (5)1.4本课题所研究的主要内容 (6)2 机械机构设计 (6)2.1机构分析 (6)2.2 设计方法 (12)2.3四连杆机构的设计 (13)2.4四个钣金零件设计 (28)2.5 躯体部分机构设计 (33)2.6 机构设计总结 (34)参考文献 (35)致谢 (37)附录一 (50)附录二 (61)1 绪论1.1国内外机器人的研究现状1.1.1机器人的定义机器人是上个世纪人类最伟大的发明之一,而从机器人的角度来讲,21世纪将是一个自治机器人的世纪。

常州信息职业技术学院学生毕业设计(论文)报告设计(论文)题目:基于单片机的六足机器人控制毕业设计(论文)任务书一、课题名称:基于单片机的六足机器人控制软件设计二、主要技术指标:前进速度:25cm/s感应障碍物距离:1米反应时间≤0.1s走直线偏差≤±5º舵机控制精度0.75º三、工作内容和要求:1:研究AT89S51单片机的结构,引脚功能,工作原理。
2:研究六足机器人的控制移动,传感器的作用距离,舵机的精度。
3:根据AT89S51的性质和六足机器人的参数,利用KEIL软件编写,调试程序。
4:下载程序到机器人,并根据实际情况对软件进行完善。
5:总结经验,完成设计报告四主要参考文献:1温宗周《单片机原理及接口技术》北京航空航天大学2009.82 彭为、黄科《单片机典型系统设计精讲》电子工业出版社2006.53刘春《自动控制计数》中国劳动社会保障出版社20044李众《单片机技术与项目训练》常州信息职业技术学院2009.7学生(签名)年月日指导教师(签名)年月日教研室主任(签名)年月日系主任(签名)年月日毕业设计(论文)开题报告基于单片机的六足机器人控制软件设计Control software of the six foot robot based on SCM目录摘要Abstract一前言 (1)二单片机的选择 (2)2.1单片机的介绍 (2)2.2 单片机的应用 (3)2.3 单片机发展趋势 (5)2.4 AT89S5151单片机特点 (6)2.5 AT89S51单片机引脚功能 (7)三六足机器人简介 (8)3.1 六足机器人原理 (18)3.2控制面板简介 (9)3.3 舵机简介 (11)3.4 传感系统 (12)四六足机器人的控制 (13)4.1 六足机器人控制程序编写 (13)4.2 六足机器人控制程序下载 (23)五结束语 (24)答谢辞参考文献摘要轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。
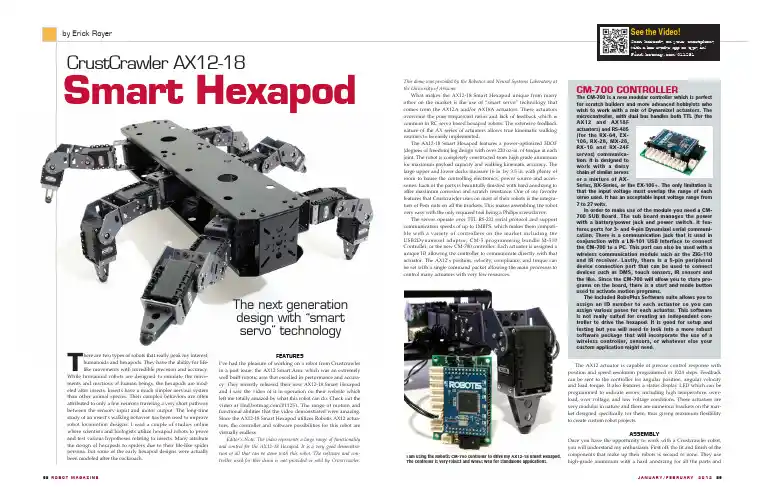
Smart HexapodThe next generationdesign with “smartservo” technology CM-700 CONTROLLERThe CM-700 is a new modular controller which is perfect for scratch builders and more advanced hobbyists whoT here are two types of robots that really peak my interest;humanoids and hexapods. They have the ability for life-like movements with incredible precision and accuracy.FEATURESI’ve had the pleasure of working on a robot from CrustcrawlerI am using the Robotis CM-700 controller to drive my AX12-18 Smart Hexapod.The controller is very robust and works well for standalone applications.leg to one of the connectors on this bus extender. I used one extender for the back four legs and one for the front two legs. Then I ran a sin-gle wire to connect the two extenders together. At this point, all that is needed was to connect the output of your controller to any empty jack on either bus extender.Once all the wires are connected, I used the included zip ties to neaten up the wiring fastening them to the legs so they will remain out of harm’s way during operation. With the wiring complete, the last step is to install the bottom deck.PROGRAMMING OPTIONSOnce the AX12+ Smart Hexapod is assembled, you will need to choose a programming method and controller to bring it to life.really need to consider the AX12-18 as there is very little on the mar-ket that can compete with the value and performance of this unit. Since they designed such a large upper and lower deck, you have the ability to mount just about anything you might need for an educa-tional research application, or for a simulated industrial, military, or other hobby application. Visit /011251 for more information and to watch the video.LinksCrustCrawler,, (480) 577-5557Robotis,For more information, please see our source guide on page 89.60Each leg has a rubber-tipped foot that supportsthe robot. The rubber isa great material becauseit dampens the impactwith the surface and pro-vides a solid grip.Here is a view with the bottom deckremoved. You can see the wiring routedto the bus extenders. There is a lot ofroom on top and in between thetwo decks to hold a powersource, controller andother peripherals./201261。
机电系统设计与制造说明书设计题目六足机器人设计班级姓名学号指导老师目录第一章.课程设计的目的与要求1.1现状分析 (4)1.2六足机器人的意义 (4)1.3课程设计的目的 (4)1.4课程设计的基本要求 (5)第二章.系统总体设计方案2.1机构简化 (6)2.2方案设计 (7)第三章.运动学计算3.1杆长分析……………………………………………………83.2杆长验证 (9)3.3位置分析……………………………………………………113.4速度分析……………………………………………………19第四章.动力学计算4.1电机转矩计算………………………………………………174.2杆件受力分析………………………………………………184.2电机选择………………………………………………19第五章.非标准件的尺寸确定及校核5.1轴的尺寸与校核……………………………………………205.2主动杆的尺寸与校核………………………………………235.3其他杆件的尺寸与校核……………………………………245.4其他零件尺寸确定……………………………………25第六章.标准件选择6.1轴承的选择与校核…………………………………………276.2联轴器的选择与校核………………………………………276.3螺栓的选择与部分承重螺栓的校核………………………276.4键的选择与校核…………………………………………29第七章.设计总结7.1课程设计过程………………………………………………317.2设计体会…………………………………………………32第八章.参考文献……………………………………………33第九章附录…………………………………………………341.1 现状分析所谓多足机器人,简而言之,就是步行机。
在崎岖路面上,步行车辆优于轮式或履带式车辆。
腿式系统有很大的优越性:较好的机动性,崎岖路面上乘坐的舒适性,对地形的适应能力强。
所以,这类机器人在军事运输、海底探测、矿山开采、星球探测、残疾人的轮椅、教育及娱乐等众多行业,有非常广阔的应用前景,多足步行机器人技术一直是国内外机器人领域的研究热点之一。
毕业设计论文六足机器人六足机器人毕业设计论文摘要:本文设计了一款六足机器人,以实现在复杂环境中搬运物品、搜救等任务。
以Arduino控制器为核心,通过编程实现六足机器人的行动规划及运动控制,并选用3D打印技术制作机器人外壳。
最终实现了基于Arduino控制下,六足机器人前进、转向、侧移等基本动作,并能够识别避障,完成指定路径寻路、越障等各种功能。
关键词:六足机器人、Arduino、3D打印、指定路径寻路、避障一、引言随着技术的不断发展,机器人应用越来越广泛。
在自动化领域,机器人不仅可以为生产自动化作出贡献,还可以在人类难以进入的危险、恶劣环境中,承担人类难以完成的任务。
六足机器人是机器人中的一种,在运动灵活性、环境适应能力、负载能力等方面有较强的优势。
本文设计了一种基于Arduino控制器的六足机器人,并采用3D打印技术制作外壳,以实现障碍物识别、路径规划以及运动控制等。
二、系统构成1、机械结构六足机器人采用模块化设计,主体结构分为机器人本体、机器人支架和电源模块。
机器人本体由六足支撑架和移动端构成,其中六足支撑架由PCB板和马达组成,移动端由六个齿轮、六个电机和三个支撑架组成。
机器人支架由两个方向支架和六个足底轮组成,支架旋转以达到转向的功能。
电源模块负责六个电机的电源供应。
2、控制器选用Arduino Mega 2560控制器作为机器人的核心,通过编程控制机器人的运动。
选用控制器的理由是其设计简单、易于编程且具有较强的计算能力。
3、传感器六足机器人内置超声波、红外、差分测量传感器等,以实现机器人对环境的感知。
三、设计与实现1、机械结构设计根据机器人的功能需求,将机器人分为三部分设计:机器人本体、机器人支架和电源模块。
机器人本体由六足支架和移动端构成,其中六足支撑架由PCB板和马达组成,移动端由六个齿轮、六个电机和三个支架组成。
机器人支架由两个方向支架和六个足底轮组成,支架旋转以达到转向的功能。
仿生六足机构的设计设计说明书论文仿生六足机构的设计设计说明书论文1.引言本文档旨在介绍和详细说明仿生六足机构的设计。
该旨在模拟昆虫的运动和行为,并具有良好的运动稳定性和适应性。
本文将涵盖的整体设计、机械结构设计、传感器布局、动力系统、控制系统以及的性能评估等方面。
2.的整体设计在本节中,将详细描述的整体设计。
包括的尺寸和重量限制、机械结构布局、传感器布置和控制系统要求等。
2.1 尺寸和重量限制的尺寸和重量限制是设计过程中的重要考虑因素。
根据应用需求,确定的总体尺寸和重量范围。
2.2 机械结构布局的机械结构布局是实现结构稳定和运动灵活性的关键。
本节将介绍的骨架设计、六足机构设计和连接机构设计。
2.2.1 骨架设计骨架设计是整体结构的基础。
根据的尺寸和重量限制,确定骨架材料和结构形式,保证的稳定性和强度。
2.2.2 六足机构设计六足机构是行走和运动的主要部件。
在本节中,将介绍六足机构的设计原理、关节设计和运动学分析。
2.2.3 连接机构设计连接机构设计是各个部件之间连接和传递力的重要环节。
根据的布局和运动需求,设计合适的连接机构,保证各部件的稳定性和运动性能。
2.3 传感器布置传感器布置是感知外部环境和自身状态的关键。
本节将介绍传感器的种类、布置位置和工作原理,保证的感知性能。
2.4 控制系统要求控制系统是实现自主运动和行为的核心。
在本节中,将详细说明的控制系统要求,包括控制算法、实时性要求和通信方式等。
3.机械结构设计机械结构设计是实现运动和行为的基础。
本节将详细介绍的机械结构设计,包括骨架设计、关节设计和运动学分析等。
3.1 骨架设计根据前文中的骨架设计要求,进行骨架结构的具体设计。
确定骨架材料、尺寸和连接方式等。
3.2 关节设计关节设计是六足行走和运动的关键。
在本节中,将介绍关节设计的原则和方法,并确定关节的结构和参数。
3.3 运动学分析运动学分析是运动和姿态控制的重要环节。
本节将对的运动学进行详细分析,包括正运动学和逆运动学,并计算的运动空间和姿态范围。
机械创新设计课程设计题目:六足式机器人的行走机构设计小组成员:班级:指导教师:成绩:1六足是机器人的行走机构设计目录摘要 (4)第一章绪论 (1)1.1. 六足仿生机器人的概念: (1)1.2.课题来源 (2)1.3.设计目的 (2)1.4.技术要求 (2)1.5.设计意义 (2)1.6.设计范围 (3)1.7.国内外的发展状况和存在的问题 (3)1.7.1.国外发展状况 (3)1.7.2.国内发展状况 (4)1.7.3.存在的问题 (5)1.8.具体设计 (5)1.8.1.设计指导思想 (5)1.8.2.应解决的主要问题 (5)1.8.3.本设计采用的研究计算方法 (6)1.8.4.技术路线 (6)第二章六足仿生机器人的步态规划 (7)2.1步态分类 (7)2.1.1 三角步态 (7)2.1.2跟导步态 (7)2.1.3交替步态 (7)2.2步态规划概述 (8)2.3六足仿生机器人的坐标含义 (9)2.4 三角步态的稳定性分析 (12)2.4.1 稳定性分析 (12)2.4.2稳定裕量的计算 (12)2.5三角步态行走步态设计 (13)2.5.1直线行走步态规划 (13)2.5.2转弯步态分析 (15)2.6六足机器人的步长设计 (15)2国际机械设计制造及其自动化专业课程设计(论文)2.7六足机器人着地点的优化 (16)第三章六足机器人的机构分析 (18)3.1四连杆机构的设计 (18)3.1.1理论根据与机构选择 (18)3.2设计参数 (21)3.3步行腿机构系统 (21)3.4 舵机驱动原理 (22)3.4.1驱动原理 (22)3.4.2 舵机控制方法 (22)3.5 六足机器人主体设计 (24)3.5.1 机身 (24)3.5.2腿部的设计 (25)3.5.3足 (25)3.5.4小腿 (26)3.5.5大腿 (27)第四章总结 (28)4.1.设计小结 (28)4.2设计感受 (28)4.3课程设计见解 (28)参考文献 (29)谢辞 (30)3六足是机器人的行走机构设计摘要人类社会的发展,各种各样的机器人正渐渐的走进我们的视野,有很多的地方都用到了机器人,在机器人的领域里越来越多的人开始爱好上了机器人。
六足机器人设计说明书摘要本次毕业设计是关于六足机器人的设计。
首先对六足机器人作了简单的概述;接着分析了各部分元件、零件的选型原则及计算方法;然后根据这些设计准则与计算选型方法按照给定参数要求进行选型设计;接着对所选择的各主要零部件进行了校核。
本次设计由四个主要部件组成:支撑腿升降装置、支撑腿摆动装置、支撑轮转动装置、主体钢结构。
最后简单的说明了说明书的安装与维护。
目前,六足机器人正朝着适应复杂地形、应对恶劣天气、采集多元信号的方向发展,近年来各种特殊功能机器人。
在特种机器人设计方面,目前我国与国外先进水平相比仍有较大差距,国内在设计制造特种机器人过程中存在着很多不足。
本次六足机器人设计代表了设计的一般过程, 难免存在各种纰漏、失误;权当一次难得的实践过程,希望对今后的选型设计工作有一定的参考和借鉴价值。
关键词:六足机器人;选型设计;主要部件;养护维修。
AbstractThis graduation design is a design of six legged robot. The first of the six legged robot is summarized; then analyzed the selection principle and calculation method of each part of components, parts; then calculated based on these design criteria and abase type design; then check the major components of the selected. Finally, a simple description of theinstallationand maintenance manual.At present, six legged robot is moving to adapt to the development direction of complex terrain, bad weather, acquisition of multiple signals, in recent years a variety of special function of the robot. The design of the six legged robot represents the general process of design, will inevitably exist various flaws, mistakes; when the right to a rare practiceprocess, want to have certain reference and reference value for the selection of the design work in the future.Keyword: :Six legged robot; type selection design ; main parts; maintenance and repair.目录摘要 (1)Abstract (1)目录 (2)一、绪论 (4)二、六足机器人设计概述 (6)2.1.六足机器人的工作原理 (6)三、六足机器人的设计计算 (8)3.1 已知原始数据及工作条件 (8)3.2 计算步骤 (8)3.2.1 外形尺寸的确定: (8)3.3.2 主要阻力计算 (9)3.3.3 主要特种阻力计算 (10)3.3.4 附加特种阻力计算 (10)3.3.5 倾斜阻力计算 (11)3.4传动功率计算 (11)P)计算 (11)3.4.1 走行轮功率(A3.5 传动链张力计算 (12)3.6 传动链轮最大扭矩计算 (12)3.7 走行轮及轴 (13)3.7.1 走行轮的作用及类型 (13)3.7.2轴的作用及类型 (16)3.7.3轴与轮的配合结构 (21)3.8电机的选用 (32)3.9减速器的选用 (33)3.9.1 传动装置的传动比: (33)3.10制动装置 (35)3.10.1制动装置的作用 (35)3.11 转向装置 (35)四、电气及安全保护装置 (37)结论 (38)致谢 (39)参考文献 (39)一、绪论六足机器人是连续运行的设备,在探测、抢险、侦查、负重等领域都有着闪光的表现。
五邑大学毕业设计说明书毕业设计题目:六足机器人的运动分析及路径规划院系机电工程学院专业机械工程及自动化学号 AP*******学生姓名诸焕城学生电话131****9195指导教师李昌明副教授完成日期 2012年5月20日摘要六足步行机器人机动性强,适应能力高,能代替多种机器人完成工作,其研究具有重要的科学意义和实际应用价值。
本文针对六足步行机器人的机体设计、步态规划、运动学分析、足端轨迹规划中的空间插值方法及避障路径规划算法等理论和技术问题,开展了较为系统的研究工作。
首先,对六足昆虫进行机械建模,确定选用椭圆形身体布局后,进一步对六足步行机器人在三角形步态下的爬行稳定性进行详细地分析;然后,求解机器人步行足运动学的正逆解问题,利用求解结果辅助规划机器人的足端轨迹。
MATLAB的分析仿真发现,在六次多项式函数的足端轨迹曲线下,步行足具有较好的运动特性;最后,先简单介绍了人工势场和蚁群算法,再合理地对两种算法进行了有效地融合与改进,扬长避短,得到了一种更高效智能的路径轨迹规划算法。
MATLAB的仿真实验结果证明了该算法的有效性。
关键词:六足步行机器人;步态规划;运动学;轨迹规划;人工势场;蚁群算法AbstractDue to the great mobility and adaptability of hexapod walking robot, and their high performances in various robotic tasks, the research on it is of momentous scientific significance and practical application value. This thesis addresses body design, gait planning and kinematics analysis, polynomial interpolation method of foot trajectory planning, and obstacle path planning algorithm for hexapod walking robot. In order to solve these problems, a systematic study for the robots is presented. Firstly, the oval body configuration is chosen based on the structure and motion characteristic of insect, and then drive deeper into the stability of crawl locomotion under the tripod gait movement. Secondly, after solving forward and inverse kinematics of swinging leg, polynomial interpolation method is adopted to find a better curve of foot trajectory. MATLAB is used to do this simulation. The solution shows that swinging leg possesses the excellent kinetic characteristic under the six-order polynominal function curve. Finally, a brief description of artificial potential field method(PFM) and ant colony algorithm(ACO) exposes the imperfection of them. A new algorithm is proposed by combining PFM with ACO effectively.Simulation results testify the validity of this method for robot path planning.Key words:Hexapod walking robot Gait planning Kinematics Trajectory planning Artificial potential field Ant colony algorithm目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 课题的来源及研究的目的与意义 (1)1.2 文献综述 (1)1.2.1 国外仿生多足机器人研究概况 (1)1.2.2 国内仿生多足机器人研究概况 (4)1.3 本课题研究的主要内容 (5)1.4 本章小结 (5)第2章仿生六足机器人机构建模 (6)2.1 仿生六足机器人机构模型 (6)2.2 基于螺旋理论的机构自由度分析 (6)2.3 机器人机体结构 (8)2.4 本章小结 (9)第3章六足机器人静态步态规划分析 (9)3.1 步态的相关概念 (9)3.2 六足机器人的步态分析 (10)3.3 三角形步态 (11)3.3.1 三角形步态的稳定性分析 (11)3.3.2 六足机器人的步长设计 (12)3.3.3 六足机器人着地点的优化 (13)3.4 本章小结 (15)第4章六足机器人的运动学分析 (15)4.1 D-H变换 (15)4.2 步行足坐标系的建立 (16)4.3 运动学正解 (17)4.4 运动学逆解 (18)4.5 基于微分变换法的雅可比矩阵 (19)4.6 本章小结 (20)第5章机器人的足端轨迹规划 (21)5.1 步行足的摆动轨迹分析 (21)5.2 步行足的摆动轨迹生成 (22)5.3 足端轨迹仿真分析 (24)5.4 本章小结 (27)第6章六足机器人避障路径轨迹规划 (28)6.1 人工势场法路径规划 (28)6.1.1 人工势场法原理 (28)6.1.2 受力分析 (30)6.2 蚁群算法路径规划 (31)6.2.1 蚁群算法原理 (31)6.2.2 基本蚁群算法的数学模型 (32)6.3 势场和蚁群算法结合与改进 (34)的构造 (34)6.3.1 启发信息ij6.3.2 期望启发式因子β的改进 (35)6.4 算法步骤 (35)6.5 基于势场蚁群算法路径规划的仿真实现 (35)6.6 本章小结 (37)结论 (38)参考文献 (39)致谢 (42)附录A 运动分析的相关程序 (43)1 计算两组支撑三角形最大重叠面积 (43)2 转换矩阵生成程序 (43)3 足端轨迹的生成和计算程序 (44)4 求运动逆解问题 (47)附录B 路径规划的相关程序 (47)1 路径规划的主程序 (47)2 计算引力、斥力与x轴的角度 (49)3 计算引力大小 (49)4 计算斥力大小 (49)5 计算合力在在八个可行方向上的分量 (51)6 计算由合力引起的启发信息 (52)7 地图生成程序 (55)8 势场蚁群算法程序 (56)第1章绪论1.1 课题的来源及研究的目的与意义机器人自问世以来,伴随着电子计算机的发展,整合多科学领域里的新成果,已经成为一种现代科学技术的典型产物,在工业、农业、娱乐、军事等行业中均扮演着举足轻重的角色。