六足机器人行走与运动仿真分析
- 格式:doc
- 大小:15.50 KB
- 文档页数:3
本文旳设计为六足爬虫机器人,机器人以交流-直流开关电源作为动力源,单片机为控制元件,伺服电机为执行部件,机器人采用三足着地进行运动,通过单片机对伺服电机旳控制,机器人可以实现前进、后退等运动方式,三足着地运动方式保证了机器人可以平稳运行。
伺服电机具有力量大,扭矩大,体积小,重量轻等特点。
单片机产生20ms 旳PWM 波形,通过软件改写脉冲旳占空比,从而到达变化伺服电机角度旳目旳。
1 机器人运动分析1.1 六足爬虫式机器人运动方案比较方案一:六足爬虫式机器人旳每条腿都能单独完毕抬腿、前进、后退运动。
此方案旳特点:每条腿都能自由活动,每条腿都能单独进行二自由度旳运动。
每条腿旳灵活性好,更轻易进行仿生运动,六足爬虫机器人可以完毕除规定外旳诸多动作,运动旳视觉效果更好。
由于每条腿能单独完毕二自由度旳运动,因此每条腿上要安装两个舵机,舵机使用数量大,舵机旳安装难度加大,机械构造部分旳制作相对复杂,又由于每个舵机都要有单独旳信号控制,电路控制部分变得复杂了,控制程序也对应旳变得复杂。
方案二:六足爬虫式机器人采用三腿为一组旳运动模式,且同一侧旳前腿、后腿旳前后转动由同一侧旳中腿进行驱动。
采用三腿为一组(一侧旳前足、后足与另一侧旳中足为一组)旳运动方式,各条腿可以协调旳进行运动,机器人旳运动相对平稳。
此方案特点:相比上述方案,个腿可以协调运动,在满足运动规定旳状况下,舵机使用数量少,节省成本。
机器人运动平稳,控制、驱动部分都得到对应旳简化,控制简朴。
选择此方案,机器人还可进行横向运动。
两方案相比,选择方案二更合适。
1.2 六足爬虫式机器人运动状态分析1.2.1 机器人运动步态分析六足爬虫式机器人旳行走是以三条腿为一组进行旳,即一侧旳前、后足与另一侧旳中足为一组。
这样就形成了一种三角形支架构造,当这三条腿放在地面并向后蹬时,此外三条腿即抬起向前准备轮换。
这种行走方式使六足爬虫式机器人运动相称稳定,任何时刻有三足着地,可以保持良好旳平衡,并可以随时随地停息下来,由于其重心总是落在三角支架之内。
基于深度学习的六足机器人梅花桩行走步态研究摘要:六足机器人以其优越的适应性和运动能力被广泛应用于各种复杂环境下的探索和救援任务中。
在六足机器人的步态控制中,通过深度学习技术来优化行走步态,将能够大大提高机器人的稳定性和运动效率。
本文利用深度学习技术对六足机器人的梅花桩行走步态进行研究,通过实验和仿真结果验证了深度学习技术在优化机器人行走步态方面的有效性。
关键词:六足机器人;梅花桩行走;深度学习;步态控制;仿真1. 引言六足机器人是一种以昆虫为原型设计的智能机器人,具有良好的适应能力和灵活性,在复杂的环境中能够完成各种任务。
梅花桩行走是六足机器人常用的一种步态,通过交替摆动和支撑腿部,在极端条件下仍能够稳定地行走。
对于梅花桩行走步态的控制仍然存在一些挑战,如何提高机器人的稳定性和运动效率成为了研究的重点。
2. 相关工作在机器人步态控制方面,已经有许多相关的研究成果。
传统的控制方法主要依赖于手工设计的控制策略和步态生成算法,这种方法需要大量的领域知识和经验,并且在复杂环境下往往表现不稳定。
近年来,深度学习技术的发展为解决这一问题提供了新的思路。
许多研究者利用深度学习技术对机器人步态进行优化,取得了显著的进展。
3. 梅花桩行走步态模型梅花桩行走是六足机器人常用的一种步态,其基本原理是通过交替摆动和支撑腿部来维持机器人的稳定性和平衡。
在梅花桩行走步态中,需要控制机器人的腿部摆动和支撑时机,以实现平稳的前进运动。
我们利用深度学习技术对梅花桩行走步态进行建模和优化,以提高机器人的运动性能。
我们将梅花桩行走步态建模为一个多输入多输出(MIMO)的控制系统,其中包括机器人的关节角度、支撑腿和摆动腿的切换时机等多个控制变量。
然后,利用深度学习技术,设计一个端到端的步态控制神经网络模型,通过输入机器人的传感器数据和目标行走速度,输出相应的控制指令,以实现机器人的自主步态控制。
4. 深度学习优化步态控制算法在本文中,我们利用深度学习技术对六足机器人的梅花桩行走步态进行优化。
六足机器人的运动分析及路径规划
引言:
一、六足机器人的运动分析
1.静态平衡:
2.步态:
3.动态平衡:
二、六足机器人的路径规划
1.全局路径规划:
全局路径规划是指六足机器人在未知环境中通过规划整个路径来达到目标地点。
常见的算法有A*算法和Dijkstra算法等。
这些算法可以通过地图信息确定机器人需要经过的路径,从而避免障碍物和陷阱。
2.局部路径规划:
局部路径规划是指六足机器人在行进过程中根据当前环境实时规划行进路径,以避开障碍物和克服地形等不利因素。
常见的算法有避障算法,如B样条算法和虚拟力场算法等。
这些算法可以根据传感器信息进行实时调整路径,以避免碰撞和陷入困境。
3.速度规划:
速度规划是指六足机器人在行进过程中根据当前环境和任务要求来规划移动速度。
常见的算法有PID控制算法和模糊控制算法等。
这些算法可以根据机器人的位置和目标位置以及环境信息来调整机器人的运动速度,以达到更加平滑和高效的运动。
三、总结
六足机器人的运动分析及路径规划是使机器人能够进行正常运动和完
成任务的关键。
静态平衡、步态和动态平衡是六足机器人运动分析的重点,全局路径规划、局部路径规划和速度规划是六足机器人路径规划的关键。
通过对六足机器人运动特点的深入分析和合理的路径规划算法的选择,可
以实现六足机器人的稳定运动和高效任务执行,从而提高机器人的实际应
用性能。
机器人的运动特点研究是机器人领域的重要方向之一,其运动特点决定了机器人的设计和控制的好坏。
而在机器人运动关节控制中,需要建立各个关节之间的坐标系,计算足端的运动轨迹和各个关节变量的关系,从而推算出机器人的运动状态。
六足机器人的运动学模型主要是建立其腿部、足端对基座坐标系随时间变换的函数,从而得到机器人腿部各个关节关于时间的运动函数模型,并仿真分析机器人关节和液压缸的位移、速度和加速度的连续性和光滑性,最终得到合理的足端轨迹。
1 D-H坐标系的建立首先将机器人的基体设定为运动坐标系,利用D-H理论建立腿部的运动学模型,求解腿部关节在基体坐标系下的运动变量。
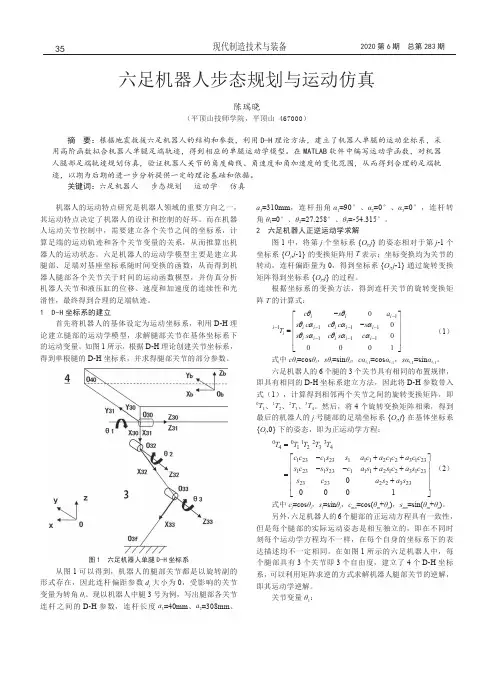
如图1所示,根据D-H理论创建关节坐标系,得到单根腿的D-H坐标系,并求得腿部关节的部分参数。
图1 六足机器人单腿D-H坐标系从图1可以得到,机器人的腿部关节都是以旋转副的形式存在,因此连杆偏距参数d i大小为0,受影响的关节变量为转角θi。
现以机器人中腿3号为例,写出腿部各关节连杆之间的D-H参数,连杆长度a1=40mm、a2=308mm、a3=310mm,连杆扭角α1=90°、α2=0°、α3=0°,连杆转角θ1=0°、θ2=27.258°、θ3=-54.315°。
2 六足机器人正逆运动学求解图1中,将第j个坐标系{O j,j}的姿态相对于第j-1个坐标系{O j,j-1}的变换矩阵用T表示;坐标变换均为关节的转动,连杆偏距量为0,得到坐标系{O j,j-1}通过旋转变换矩阵得到坐标系{O j,j}的过程。
根据坐标系的变换方法,得到连杆关节的旋转变换矩阵T的计算式:111111110001i i ii i i i iiii i i i ic s as c c c sTs s c s cθθθαθααθαθαα−−−−−−−−−−=(1)式中cθi=cosθi,sθi=sinθi,cαi-1=cosαi-1,sαi-1=sinαi-1。
基于深度学习的六足机器人梅花桩行走步态研究【摘要】本文研究基于深度学习的六足机器人梅花桩行走步态,通过深度学习算法在步态控制中的应用,设计出优化的步态方案。
结合实验设计和结果分析,对比评估六足机器人的步态性能。
研究表明,深度学习在六足机器人步态控制中取得显著效果,提升了步态的稳定性和效率。
研究成果对于推动机器人技术的发展具有重要意义,未来的研究可以继续深化深度学习在机器人步态控制领域的应用,进一步提升机器人的运动性能和适应性。
通过本文的研究,可以为未来的机器人设计和应用提供重要的参考和指导。
【关键词】深度学习、六足机器人、梅花桩、步态控制、步态设计、算法优化、实验设计、结果分析、步态评估、效果评价、研究成果、未来研究方向。
1. 引言1.1 研究背景近年来,随着深度学习在机器人控制领域的广泛应用,其强大的非线性拟合能力和自适应性能够帮助六足机器人实现更加灵活和稳定的步态控制。
深度学习算法能够根据传感器数据实时学习优化步态参数,提高六足机器人的行走效率和适应性,从而为六足机器人在复杂环境中的应用提供更好的技术支持。
基于深度学习的六足机器人梅花桩行走步态研究能够有效地解决传统步态设计中的问题,提高六足机器人的稳定性和适应性,为其在各种应用场景中更好地发挥作用奠定基础。
本研究旨在探索深度学习在六足机器人步态控制中的应用,并通过实验设计和结果分析,评估基于深度学习的六足机器人步态的性能优劣,为未来六足机器人的研究和应用提供参考。
1.2 研究意义此次研究旨在探讨基于深度学习的六足机器人梅花桩行走步态,通过深度学习算法对步态进行优化,提高机器人的运动效率和稳定性。
研究结果将为六足机器人的步态控制提供重要参考和指导,有助于推动机器人技术在实际应用中的发展和应用。
深入探讨深度学习在机器人步态控制中的应用,有助于拓展机器人在不同环境下的应用领域,实现机器人与人类社会的更好融合和协作。
这些研究成果将为未来机器人技术的发展和创新提供重要的理论和实践基础。
仿生六足机器人的结构设计及运动分析一、结构设计1.机体结构:仿生六足机器人的机体结构通常采用轻型材料如碳纤维和铝合金制作,以保证机器人整体重量轻,同时具备足够的强度和刚度。
机体一般采用箱型结构,保证机器人整体稳定。
2.足部结构:仿生六足机器人的足部结构是其中最重要的部分,直接关系到机器人的运动能力和适应性。
足部结构通常由刚性材料制成,具有良好的强度和刚度。
每个足部通常由三个关节驱动,分别是髋关节、膝关节和脚踝关节。
这些关节的设计对机器人的运动能力和足部适应性有着重要影响。
3.关节驱动方式:仿生六足机器人的关节驱动方式通常采用电机驱动和传动装置。
电机驱动可以提供足部的力和扭矩,使机器人能够进行各种运动,传动装置则用来将电机的运动传递到足部关节。
可以采用齿轮传动、连杆传动、带传动等方式,根据实际需求进行合理选择。
二、运动分析1.步态规划:步态规划是确定六足机器人各个足部的步态序列,以实现机器人的稳定行走。
常用的步态有三角步态、扭摆步态和螳臂步态等。
步态规划需要考虑机器人的稳定性和适应性,结合地面情况和环境要求进行合理选择。
2.动力学模拟:动力学模拟是对仿生六足机器人的运动进行分析和仿真,以优化机器人的运动能力和稳定性。
通过建立六足机器人的运动学和动力学模型,可以预测机器人的运动轨迹、步态设计和稳定性评估等。
动力学模拟可以帮助改善机器人的设计和控制策略。
3.控制策略:仿生六足机器人的控制策略采用了分布式控制和自适应控制的方法。
分布式控制通过将机器人的控制任务分配给多个子控制器,使得机器人具备较好的容错性和适应性。
自适应控制方法则通过对机器人的运动进行实时监测和反馈调整,使机器人能够自主学习和适应不同环境和任务。
综上所述,仿生六足机器人的结构设计和运动分析是实现机器人稳定行走和适应环境的重要环节。
正确的结构设计和合理的运动分析可以有效提高机器人的运动能力和稳定性,从而使机器人在实际应用中具备良好的适应性和操作性能。
六足仿生机器人及其步态研究现状调查目录引言 (6)二.六足仿生机器人的发展现状 (6)三.六足仿生机器人越障步态运动原理 (11)四.六足机器人三角步态分析 (12)五.六足机器人越障步态设计 (13)六.六足仿生机器人越障步态的选择 (15)结论 (17)引言步态是行走系统的迈步方式,即行走系统抬腿和放腿的顺序。
由于开发步行机器人的需要,McGhee在1968年总结前人对动物步态研究成果的基础上,比较系统地给出了一系列描述和分析步态的严格的数学定义。
之后各国学者在四足、六足、八足等多足步行机的静态稳定的规则周期步态的研究中取得了很多成果。
这些成果包括各种步态特点及分类,如三角步态、波动步态、自由步态、跟随步态、步态参数及其相互关系等。
二.六足仿生机器人的发展现状从 1959年美国制造出世界上第一台工业机器人起,在短短半个世纪的时间里,机器人的研究就已经历了4个发展阶段:工业机器人、遥控机器人、智能机器人和仿生机器人[2]。
从机器人的角度来看,仿生机器人是机器人发展的最高阶段;从仿生学的角度来看,仿生机器人是仿生学理论的完美综合与全面应用。
本质上讲,仿生机器人指的是利用各种无机元器件和有机功能体所组建起来的在运动机理和行为方式、感知模式和信息处理、控制协调和计算推理、能量代谢和材料结构等多方面具有生命形态特征从而可以在未知的非结构化环境中灵活、可靠、高效地完成各种复杂任务的机器人系统[3]近年来,随着昆虫仿生学理论与计算机技术的飞速发展,使得对多足仿生机器人的研究,成为大家关注的焦点。
国内外多所大学和研究机构,相继成功研制出了性能卓越的多足仿生机器人。
六足机器人 Genghis(见图 1-1),由美国麻省理工学院人工智能实验室于1989 年研制,主要用于在地外行星(如火星)表面执行探测任务。
每条腿 2 个旋转自由度,采用基于位置反馈的伺服电机驱动,集成了电流测量单元以获取关节力矩信息,装备了 2 个触须传感器、2 个单轴加速度计,可在复杂路面上高效行走。
六足式步行机器人运动机理与步态分析毕业论文目录摘要 (I)abstract (II)1 绪论 (1)1.1国外机器人的研究现状 (1)1.2机器人的主要研究问题 (3)1.3机器人的发展趋势 (5)1.4本课题所研究的主要容 (6)2 机械机构设计 (6)2.1机构分析 (6)2.2 设计方法 (12)2.3四连杆机构的设计 (13)2.4四个钣金零件设计 (28)2.5 躯体部分机构设计 (33)2.6 机构设计总结 (34)参考文献 (35)致谢 (37)附录一 (50)附录二 (61)1 绪论1.1国外机器人的研究现状1.1.1机器人的定义机器人是上个世纪人类最伟大的发明之一,而从机器人的角度来讲,21世纪将是一个自治机器人的世纪。
随着机器人的工作环境和工作任务的复杂化,要求机器人具有更高的灵活性、可靠性、准确性、稳定性和更强的适应性。
机器人技术是研究机器人工程技术的学问。
关于机器人各国有不同的定义,其中一种定义得方法是“机器人是可通过感觉与智能进行作业的并具有与人或动物相似的外观和机能的机械”。
上述的定义是强调“可进行作业”的性质。
而机器人的感觉机能和移动即能只不过是进行作业是必要的辅助技能而已。
这里所说的作业并不是单一的简单工作,而是能够进行多种动作的作业。
即具有通用性(或柔性)工作能力。
例如,数控机床加工工件的能力虽然很强,但是它不能进行其它的作业,所以不能称它为机器人,此外数控机床的外观也很少有与生物相似之处。
按照上述的定义,机器人具有以下几个特点:一是有人类的功能,比如说作业功能、感知功能、行走功能,能完成各种动作;另一个特点是根据人的编程能自动工作,由于它通过编程才能改变它的工作、动作,工作的对象和一些要求。
一般来说我们认为机器人是计算机控制的可以编程的目前能够完成某种工作或可以移动的自动化机械。
虽然机器人的模型是动物或人,但是企图给机器人赋予人类那样的高度机能是不可能的。
例如,在需要高级的认识与判断的地方,还必须有人的帮助,就是非常高级的机器人也还必须进行人机对话才行。
六足仿蜘蛛机器人的结构设计与仿真分析一、概述随着科技的飞速进步,机器人技术已经逐渐渗透到各个领域,特别是在仿生机器人领域,其研究与应用更是取得了显著的成果。
六足仿蜘蛛机器人作为仿生机器人的一种,其结构设计与仿真分析是当前研究的热点之一。
六足仿蜘蛛机器人是一种模拟蜘蛛行走方式的机器人,具有适应性强、稳定性高、运动灵活等优点。
通过模拟蜘蛛的六足行走机制,该机器人能够在复杂环境中实现高效、稳定的运动,具有重要的应用价值。
在结构设计方面,六足仿蜘蛛机器人需要考虑多个因素,包括机械结构、驱动方式、运动学分析等。
机械结构是机器人的基础,需要合理设计各部件的尺寸、形状和连接方式,以实现机器人的稳定行走和灵活运动。
驱动方式的选择直接影响到机器人的运动性能和效率,常见的驱动方式包括电机驱动、液压驱动等。
运动学分析则是研究机器人运动规律的重要手段,通过对机器人运动学模型的建立和分析,可以预测和优化机器人的运动性能。
在仿真分析方面,通过建立六足仿蜘蛛机器人的虚拟样机,可以在计算机环境中进行各种实验和测试,以验证机器人设计的合理性和有效性。
仿真分析可以帮助研究人员快速发现设计中存在的问题,并进行相应的优化和改进。
仿真分析还可以为机器人的实际制造和测试提供重要的参考依据。
本文旨在探讨六足仿蜘蛛机器人的结构设计与仿真分析方法,为该类机器人的研究和应用提供有益的参考和借鉴。
1. 机器人技术的发展趋势随着科技的飞速进步,机器人技术正迎来前所未有的发展机遇。
从简单的自动化操作到复杂的智能决策,机器人技术正逐步渗透到我们生活的方方面面。
在当前的科技浪潮中,机器人技术的发展趋势呈现出以下几个显著特点。
人工智能技术的深度融合是机器人技术发展的重要方向。
随着深度学习、神经网络等技术的不断发展,机器人逐渐具备了更强的感知、理解和决策能力。
这使得机器人能够更好地适应复杂多变的环境,实现更高级别的自主操作。
机器人技术的集成化趋势日益明显。
传统的机器人往往只具备单一的功能,而现代机器人则更倾向于将多种功能集成于一体,实现一机多用。
六足机器人的步态分析与实现——1六足机器人的步态分析与实现——1步态是指机器人在运动中的腿部动作序列和时序,能够决定机器人的移动效果和稳定性。
六足机器人的步态有多种类型,例如三角步态、波浪步态和平行步态等,每种步态都有其优势和适应环境的特点。
下面将以三角步态为例,探讨六足机器人的步态分析与实现。
三角步态是一种相对简单且稳定的步态,通过两组对角线的腿部交替运动实现机器人的平稳移动。
其中,每组对角线的腿部依次为前左、中右和后左腿以及前右、中左和后右腿。
三角步态通常有两个阶段,即支撑阶段和摆动阶段。
在支撑阶段中,对角线的前两条腿同时着地,提供支撑力,使机器人保持平衡。
在此同时,后两条腿离地并进行摆动准备。
支撑阶段的关键是保持机器人的平衡,可以通过传感器实时检测机器人的倾斜角度,并通过调整腿部摆动幅度来保持平衡。
在摆动阶段中,先离地的两条腿进行前摆,后两条腿进行后摆,以便于整个机器人向前移动。
在摆动阶段,需要考虑腿部运动的坡度、步幅和频率等参数,以实现稳定的步态和高效的移动。
摆动阶段的关键是合理分配腿部的移动,以保证机器人的稳定和平滑的前进。
为了实现六足机器人的步态,需要通过控制系统和传感系统来实现腿部的运动控制和平衡调整。
控制系统可以使用反馈控制算法,通过传感器获取机器人的姿态信息,并进行实时的运动控制。
传感系统可以使用力传感器、陀螺仪和加速度计等传感器,实时监测机器人的姿态和环境信息。
另外,六足机器人的步态实现还需要考虑到各腿之间的协调和同步。
可以通过通信模块实现腿部之间的信息传递和协调,以确保六足机器人在运动中的平衡和稳定。
总结来说,六足机器人的步态分析与实现是一个复杂而关键的过程。
需要考虑到机器人的稳定性、效率和灵活性,选择合适的步态类型,并且通过控制系统和传感系统实现腿部的运动控制和平衡调整。
通过合理的步态设计和实现,可以使六足机器人在各种环境中实现平稳、高效的移动。
项目研究报告北京理工大学机电学院 20081043 吴帆——小型仿生六足探测机器人一、课题背景:仿生运动模式的多足步行机器人具有优越的越障能力,它集仿生学原理、机构学理论、自动控制原理与技术、计算机软件开发技术、传感器检测技术和电机驱动技术于一体。
不论在何种地面上行走,仿生六足机器人的运动都具有灵活性与变化性,但其精确控制的难度很大,需要有良好的控制策略与精密的轨迹规划,这些都是很好的研究题材。
二、项目创新点:作为简单的关节型伺服机构,仿生六足机器人能够实现实时避障,合理规划行走路线。
简单的关节型机器人伺服系统不仅具有可批量制造的条件,作为今后机器人群系统的基本组成,也可以作为探索复杂伺服机构的研究对象。
三、研究内容:1.仿生学原理分析:仿生式六足机器人,顾名思义,六足机器人在我们理想架构中,我们借鉴了自然界昆虫的运动原理。
足是昆虫的运动器官。
昆虫有3对足,在前胸、中胸和后胸各有一对,我们相应地称为前足、中足和后足。
每个足由基节、转节、腿节、胫节、跗节和前跗节几部分组成。
基节是足最基部的一节,多粗短。
转节常与腿节紧密相连而不活动。
腿节是最长最粗的一节。
第四节叫胫节,一般比较细长,长着成排的刺。
第五节叫跗节,一般由2-5个亚节组成﹔为的是便于行走。
在最末节的端部还长着两个又硬又尖的爪,可以用它们来抓住物体。
行走是以三条腿为一组进行的,即一侧的前、后足与另一侧的中足为一组。
这样就形成了一个三角形支架结构,当这三条腿放在地面并向后蹬时,另外三条腿即抬起向前准备替换。
前足用爪固定物体后拉动虫体向前,中足用来支持并举起所属一侧的身体,后足则推动虫体前进,同时使虫体转向。
这种行走方式使昆虫可以随时随地停息下来,因为重心总是落在三角支架之内。
并不是所有成虫都用六条腿来行走,有些昆虫由于前足发生了特化,有了其他功用或退化,行走就主要靠中、后足来完成了。
大家最为熟悉的要算螳螂了,我们常可看到螳螂一对钳子般的前足高举在胸前,而由后面四条足支撑地面行走。
基于D-H矩阵的六足机器人运动仿真与分析作者:李胜铭朱碧珂王秉奇吴振宇来源:《物联网技术》2019年第12期摘要:六足机器人具有较好的多地形适应能力,常用于勘测、侦察等人类无法完成的工作。
针对其足数较多,控制算法复杂的问题,从单足的运动控制开始,建立描述其运动规律的D-H矩阵,计算出运动学方程。
通过求解单足运动学方程的正解,建立机器人单足运动学模型,通过ADAMS实验仿真,得出六足机器人各关节在不同坐标系下的位移、角速度变化规律。
最后对六足机器人的直线行走、转弯步态进行分析。
该方法具有结构清晰、计算简单的优点,可为六足机器人的运动控制提供解决方案与参考。
关键词:D-H矩阵;六足机器人;运动学模型;步态;运动仿真;ADAMS实验中图分类号:TP242.6 文獻标识码:A 文章编号:2095-1302(2019)12-00-050 引言随着人类对未知活动空间的不断探索,机器人已成为一种强大而有效的工具。
从人类进步与发展的角度看,这种可自由移动、自动执行工作的机器装置,或将成为21世纪最具活力与创造力的领域之一,它将带来巨大的社会与经济效益[1]。
在众多可移动机器人系列中,足式机器人能够更好地适应多种地形条件,在不规则地形下的平稳性更好,有能力隔离不规则地形。
此外,相对于轮式及履带式移动方式而言,足式对环境的破坏较小,机动性能及燃油经济性更好[2-3]。
在庞大的足式机器人家族中,根据足数的不同可分为单足、双足、三足及四足、六足、八足机器人等。
在足式机器人运动过程中,必须进行运动学分析,保证其按照规定路线移动,同时维持本身动平衡[4]。
因此,机器人身体上的每一个运动结构均需要精准的控制算法和调节方式。
六足机器人的每条单足均由三个关节(股部、大腿、小腿)通过转动副的形式串联而成,构成具有三个自由度的空间连杆机构[5]。
传统利用几何关系法推导执行器与控制端的位移关系,或在大地坐标系内建立方程,表示每个关节相对于基坐标的运动规律。
第5章六足爬行机器人的运动仿真机构仿真是机械系统现代设计方法中的一门新的应用技术,机构仿真具有模拟样机数值仿真。
缩短设计周期和成本、在实物产生前预先评估设计作用和功效,是现代机械设计技术的经典所在。
Pro E是基于单一数据库、参数化、全相关及工程数据再利用等概念的基础上开发出的一个功能强大的CAD/CAE/CAM软件,是目前国内外机械制造业中应用广泛的软件。
Pro E集成了多种模块,可以提供从工业设计到NC加工同步工程的产品开发方法。
现在一般的机械设计都采用其作为仿真软件,此次六足爬行机器人的设计也采用了Pro E仿真,并且可以用Pro E对机械结构进行有限元分析,提高设计的合理性。
使用软件对设计模型进行运动仿真和有限元分析,能够模拟出在真实环境工作状况并对其进行分析和研究,尽早发现设计中的缺陷,并验证产品功能和性能的可靠性,提前进行修改和优化,从而减少制造中发现问题而付出昂贵的代价,提高设计的可行性和缩短周期。
Pro E版本更新较快,最新的Pro E 5.0除了界面变化外,其功能也增加很多,此次采用Pro E 5.0作为设计软件,在绘制草图时,系统将会自动加入约束条件,使几何关系满足自己的实际要求。
5.1零件模型的建立1、选取新建命令在工具栏中单击新建文件图标(红色框内图标)。
2、选取文件类型、子类型、输入文件名、取消使用装配默认模版在弹出的文件“新增”对话框中,进行下列操作:1)选择“类型”选项组下的零件;2)选择“子类型”选项下的实体;3)在“名称”问本框中输入要制作零件的英文文件名;4)通过取消的“√”号,来取消“使用默认模版”;5)在模板下面的选择框内选择mmns_part_solid;6)单击“确定;3、在绘图区域,绘制玩零件后保存,至此零件已做好。
由于此次设计的六足爬行机器人零件非常多,所以限于篇幅的限制,在这里不做太多的讲解。
以下几个图是机器人身体上比较重要的几个零件。
图5.1 六足爬行机器人机体底板建模机器人的腿部结构是这次设计的重点,在满足设计尺寸的要求下,我设计的模拟仿真图如下。
六足仿生机器人研究报告摘要:多足仿生机器人拥有的出色的地形适应能力使其在特种机器人领域闪耀夺目,成为近年来机器人领域的一颗无法忽视的新星。
本课题所研制六足仿生机器人由18个舵机组成6条腿,每条腿有1个水平旋转及2个垂直升降共3个自由度。
该六足仿生机器人由ATmega16单片机精确控制到每个舵机,可实现机器人模仿昆虫三三足行走。
本文将从六足仿生机器人的设计、六足仿生机器人的功能实现、六足仿生机器人的功能扩展三大方面展示研究成果。
关键词:六足仿生机器人;昆虫行走;地形适应能力;跨障一、六足仿生机器人的设计六足仿生机器人集仿生学原理、机构学理论、计算机软件开发技术、自动控制原理与技术、传感器检测技术和电机驱动技术于一体。
对于传统的行动结构,其优势在于其具有的优越的跨障碍能力,以及在复杂地形条件下的地形适应能力。
本课题基于六足仿生机器人的行走方式、行动机构结构设计、伺服器的驱动进行研究。
1.仿生学原理分析该六足仿生机器人基于模仿昆虫的运动原理设计而成,故本课题首先对昆虫如何运动进行了研究。
昆虫有3对共6条足,分别分布于前、中、后胸,由所处位置相应被称为前足、中足、后足,每条足可分为六节,由基部向末端依次为基节、转节、腿节、胫节、跗节和前跗节。
昆虫的足的主要自由度可视为3个,分别由转节、胫节、跗节完成,实现足的自由活动。
昆虫行走时每次以三条足为一组,两组足交替运动。
在昆虫的实际运动过程中,昆虫前进、后退、转向时其足皆按此方法三三足行走,只是由每条足移动的位置不同而实现不同的动作。
2.六足仿生机器人运动学分析(1)三角步态行走法昆虫运动时,它的三对足分为两组交替运动,每三足构成一个三角形支架结构,这便是三角步态行走法。
在六足仿生机器人的实际运动中,其步态多种多样,而三角步态行走法为六足仿生机器人实现行走的典型步态。
(2)六足仿生机器人的行走分析①昆虫的足主要有3个自由度,因此在机器人的每条足上我们安装了3个可实现角度精确控制的舵机来实现3个自由度,其中1个水平旋转自由度、2个垂直升降自由度。
五邑大学毕业设计说明书毕业设计题目:六足机器人的运动分析及路径规划院系机电工程学院专业机械工程及自动化学号 AP*******学生姓名诸焕城学生电话131****9195指导教师李昌明副教授完成日期 2012年5月20日摘要六足步行机器人机动性强,适应能力高,能代替多种机器人完成工作,其研究具有重要的科学意义和实际应用价值。
本文针对六足步行机器人的机体设计、步态规划、运动学分析、足端轨迹规划中的空间插值方法及避障路径规划算法等理论和技术问题,开展了较为系统的研究工作。
首先,对六足昆虫进行机械建模,确定选用椭圆形身体布局后,进一步对六足步行机器人在三角形步态下的爬行稳定性进行详细地分析;然后,求解机器人步行足运动学的正逆解问题,利用求解结果辅助规划机器人的足端轨迹。
MATLAB的分析仿真发现,在六次多项式函数的足端轨迹曲线下,步行足具有较好的运动特性;最后,先简单介绍了人工势场和蚁群算法,再合理地对两种算法进行了有效地融合与改进,扬长避短,得到了一种更高效智能的路径轨迹规划算法。
MATLAB的仿真实验结果证明了该算法的有效性。
关键词:六足步行机器人;步态规划;运动学;轨迹规划;人工势场;蚁群算法AbstractDue to the great mobility and adaptability of hexapod walking robot, and their high performances in various robotic tasks, the research on it is of momentous scientific significance and practical application value. This thesis addresses body design, gait planning and kinematics analysis, polynomial interpolation method of foot trajectory planning, and obstacle path planning algorithm for hexapod walking robot. In order to solve these problems, a systematic study for the robots is presented. Firstly, the oval body configuration is chosen based on the structure and motion characteristic of insect, and then drive deeper into the stability of crawl locomotion under the tripod gait movement. Secondly, after solving forward and inverse kinematics of swinging leg, polynomial interpolation method is adopted to find a better curve of foot trajectory. MATLAB is used to do this simulation. The solution shows that swinging leg possesses the excellent kinetic characteristic under the six-order polynominal function curve. Finally, a brief description of artificial potential field method(PFM) and ant colony algorithm(ACO) exposes the imperfection of them. A new algorithm is proposed by combining PFM with ACO effectively.Simulation results testify the validity of this method for robot path planning.Key words:Hexapod walking robot Gait planning Kinematics Trajectory planning Artificial potential field Ant colony algorithm目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 课题的来源及研究的目的与意义 (1)1.2 文献综述 (1)1.2.1 国外仿生多足机器人研究概况 (1)1.2.2 国内仿生多足机器人研究概况 (4)1.3 本课题研究的主要内容 (5)1.4 本章小结 (5)第2章仿生六足机器人机构建模 (6)2.1 仿生六足机器人机构模型 (6)2.2 基于螺旋理论的机构自由度分析 (6)2.3 机器人机体结构 (8)2.4 本章小结 (9)第3章六足机器人静态步态规划分析 (9)3.1 步态的相关概念 (9)3.2 六足机器人的步态分析 (10)3.3 三角形步态 (11)3.3.1 三角形步态的稳定性分析 (11)3.3.2 六足机器人的步长设计 (12)3.3.3 六足机器人着地点的优化 (13)3.4 本章小结 (15)第4章六足机器人的运动学分析 (15)4.1 D-H变换 (15)4.2 步行足坐标系的建立 (16)4.3 运动学正解 (17)4.4 运动学逆解 (18)4.5 基于微分变换法的雅可比矩阵 (19)4.6 本章小结 (20)第5章机器人的足端轨迹规划 (21)5.1 步行足的摆动轨迹分析 (21)5.2 步行足的摆动轨迹生成 (22)5.3 足端轨迹仿真分析 (24)5.4 本章小结 (27)第6章六足机器人避障路径轨迹规划 (28)6.1 人工势场法路径规划 (28)6.1.1 人工势场法原理 (28)6.1.2 受力分析 (30)6.2 蚁群算法路径规划 (31)6.2.1 蚁群算法原理 (31)6.2.2 基本蚁群算法的数学模型 (32)6.3 势场和蚁群算法结合与改进 (34)的构造 (34)6.3.1 启发信息ij6.3.2 期望启发式因子β的改进 (35)6.4 算法步骤 (35)6.5 基于势场蚁群算法路径规划的仿真实现 (35)6.6 本章小结 (37)结论 (38)参考文献 (39)致谢 (42)附录A 运动分析的相关程序 (43)1 计算两组支撑三角形最大重叠面积 (43)2 转换矩阵生成程序 (43)3 足端轨迹的生成和计算程序 (44)4 求运动逆解问题 (47)附录B 路径规划的相关程序 (47)1 路径规划的主程序 (47)2 计算引力、斥力与x轴的角度 (49)3 计算引力大小 (49)4 计算斥力大小 (49)5 计算合力在在八个可行方向上的分量 (51)6 计算由合力引起的启发信息 (52)7 地图生成程序 (55)8 势场蚁群算法程序 (56)第1章绪论1.1 课题的来源及研究的目的与意义机器人自问世以来,伴随着电子计算机的发展,整合多科学领域里的新成果,已经成为一种现代科学技术的典型产物,在工业、农业、娱乐、军事等行业中均扮演着举足轻重的角色。
六足机器人行走与运动仿真分析
作者:詹广强赵基伟谢磊超
来源:《无线互联科技》2014年第06期
摘要:虚拟仿真设计方法在现代机械设计中占有重要地位,针对目前虚拟仿真软件存在的不足之处,在设计时往往需要选用多个仿真软件组合使用才能达到所需的仿真目的。
本文设计了一个六足双斗机器人,应用建模和仿真功能较齐全的Inventor对其进行虚拟分析,检查机器人在行走和爬坡过程中的行走步态,获得机器人在不同工作状态下重心的变化曲线,分析机器人设计的合理性,为更好的设计新型六足机器人提供设计依据。
并制造了小型物理样机,检验仿真设计的可靠性,通过物理样机试验,验证Inventor仿真的可靠性和正确性。
关键词:虚拟仿真设计;六足机器人;Inventor;运动仿真Inventor是一种全面的可视化设计工具,用于创建和验证完整的数字样机,可以检验机械产品的外型、结构和功能,也可以对其进行运动仿真和应力分析,设计师应用这种软件可对数字化样机进行优化,并预测机械产品在未来的实际工作情况[1]。
本文设计了六足双斗机器人,机器人采用足式移动方式优点在于控制简单,移动比较迅速,同时可以相对较容易地跨过比较大的障碍,但是当机器人在行走时,整个物体的重心会发生变化,各个关节受到的速度及加速度也不同,在不行走,进行挖掘工作,不同部位受到的力也不一样。
本文应用Inventor对六足机器人在平地行走和爬坡过程中重心的位置、速度加速度变化进行仿真分析,Inventor集设计、建模和仿真于一体,且操作简单,这给设计工作带
来了许多方便,节约了研究时间和研制费用,实现了高质量、高速度、高效率、低成本的整体设计。
本文所应用的软件为虚拟设计方法又提供了一个方便可行的办法,同时,设计的六足机器人为足类机器人的设计也提供了一些思路。
在Inventor的虚拟仿真下,得到所设计的六足机器人的一些有用信息,为更好的设计新型六足机器人提供了参考依据。
小型物理样机试验,行走和利用双斗夹取物体。
1六足机器人整体结构
Inventor非常注重产品外观设计,同时其渲染功能也易于操作,效果良好,应用Inventor 对六足机器人进行整体结构造型和渲染,结果如图1所示,其中腿部结构放大图如图2所示。
图2(a)图是腿部结构运动简图,输入旋转运动,在滑块和曲柄的作用下转化为腿部摇摆运动[2],腿部机构的摇摆幅度为[-24°~+24°],由于该机器人的腿部关节是铰接和滑动副,因而在步行时即使出现失稳现象也具有较强的姿态恢复能力[3],足部使用减震和缓冲作用的橡胶材料。
2机器人步态分析
在机器人研究领域,支撑相和摆动相随时间变化的顺序集合称为步态。
对匀速行走的机器人来说,其足相呈周期变化规律,由于这时步态是周期性变化的,故称为周期步态,在一个周期T内,支撑相的时间为t,则该足的有荷因数β按下式计算[4]:
一个步态周期中,步行机器人机体重心向前移动的距离称为步距s,各足处于支撑相时相对于机体的移动距离称为足的行程R,两者的关系为[4]:
三角步态是六足仿生步行机器人实现步行的典型步态[4]。
其核心思想是把机器人的六足分为两组(躯体一侧的前、后足和另一侧的中足构成一组,其余足构成另一组),三足支撑机体并推动机器人前进(称为支撑相),另三足摆动为下一步支撑做准备(称为摆动相),整个机器人的运动过程就是支撑相与摆动相交替、循环的过程。
如图3所示,1、5、4为一组(后文称为实心组),2、3、6为另一组(后文称为空心组),实心组和空心组在相位上相差180°。
起初实心组作为支撑相,而空心组作为摆动相向前移动;之后空心组作为支撑相,实心组作为摆动相向前移动,这样完成一个交替循环。
六足机器人爬坡行走状态及整体受力分析如图4所示,腿部形成的摩擦力克服重力的一个分力达到向前行走的目的。
在爬坡时双斗的位置严重影响机器人的稳定性和爬坡能力,设计双斗的最佳放置位置,有利于机器人的爬坡动作。
3基于Inventor的机器人运动仿真
3.1 重心变化情况分析
六足机器人重心位置、速度、加速度对机器人整体的稳定性有重要影响[5],通过仿真得到在不同爬坡角度下重心的变化曲线,分析机器人的稳定性。
如图5所示,机器人在平面上行走时的重心变化曲线,由前面设计的腿部结构可知,机器人每走一步,在竖直方向上重心都有一个上升和下降的过程,竖直方向波动幅值越大说明机器人步距也越大,太大的步距影响机器人的稳定性。
水平方向上的波动越小越好,如图5(b)所示,Y方向上的速度波动非常小,加速度对机器人零部件有一个动载荷的作用,求出行走每一步的加速度后还可以计算出零部件上的动载荷。
从图中可以看出,重心在各种情况下的变化曲线有很强的周期性,这与前面的分析一致。
通过虚拟仿真分析,所设计的六足机器人最大爬坡角度为22°,重心变化曲线如图7所示,图6为爬坡角度为15°时的重心变化曲线。
5结论
本文基于Inventor环境设计了六足双斗机器人,机器人的主要功能是行走、爬坡和夹持物体。
通过在Inventor环境中的虚拟建模和仿真,得到六足机器人的整体结构,并对机器人进行
了运动学仿真与分析。
通过仿真分析,得出了不同爬坡角度下机器人重心的变化曲线,同时也验证了所设计的三角步态的稳定性和适用性,得到了所设计的六足机器人的最大爬坡角度为22°。
应用Inventor的虚拟仿真设计手段大大缩短了设计周期,提高了六足仿生步行机器人的设计效率、设计可靠性和研制水平,在机器人设计技术领域具有一定的指导意义。
[参考文献]
[1]陈伯雄.Inventor R8应用培训教程:机械设计[M].清华大学出版社,2004.9.
[2]孙恒,陈作模,葛文杰.机械原理[M].高等教育出版社,2006.
[3]闫尚彬,韩宝玲,罗庆生.仿生六足步行机器人步态轨迹的研究与仿真[J].计算机仿
真.2007.10.156~160.
[4]许睦旬.Inventor2009三维机械设计应用基础[M].高等教育出版社.2009.7.
[5]陈殿生,黄宇,王田苗.轮式腿型机器人的越障分析与仿真[J].北京航空航天大学学
报.2009.3.371~375.。