超静定结构力法
- 格式:pptx
- 大小:2.89 MB
- 文档页数:137
用力法求解超静定结构概述超静定结构是指结构中的支座和约束条件多于结构自由度的情况。
用力法是一种经典的结构分析方法,常用于求解超静定结构。
本文将介绍用力法求解超静定结构的基本原理和步骤,并通过实例加以说明。
一、基本原理用力法的基本原理是根据平衡条件和变形约束,通过假设未知力的大小和方向,建立力的平衡方程和变形方程,解出未知力和结构的变形。
用力法适用于各种类型的结构,包括梁、柱、桁架等。
二、步骤用力法求解超静定结构的步骤如下:1. 选择合适的剖面根据结构的几何形状和约束条件,选择合适的剖面,将结构分割为若干个部分。
2. 假设未知力的方向和大小根据结构的特点和约束条件,假设未知力的方向和大小。
通常,未知力的方向可以根据结构的几何形状和外力的作用方向来确定,而未知力的大小则需要通过力的平衡方程来求解。
3. 建立力的平衡方程根据假设的未知力和结构的几何形状,建立力的平衡方程。
平衡方程包括力的平衡条件和力的矩平衡条件。
4. 建立变形方程根据结构的变形情况和约束条件,建立变形方程。
变形方程可以根据结构的刚度和约束条件来确定。
5. 解方程将力的平衡方程和变形方程联立,解方程组得到未知力和结构的变形。
6. 检验结果将求解得到的未知力和结构的变形代入原平衡方程和变形方程中,检验结果的准确性。
如果结果符合平衡和变形的要求,则求解成功;如果结果不符合要求,则需要重新假设未知力并重新求解。
三、实例分析为了更好地理解用力法求解超静定结构的步骤和原理,下面以一个简单的梁结构为例进行分析。
假设有一根悬臂梁,在梁的自重和外力作用下,需要求解支座反力和梁的变形。
1. 选择合适的剖面选择悬臂梁的剖面,将梁分割为两个部分:悬臂部分和支座部分。
2. 假设未知力的方向和大小假设支座反力的方向向上,大小为R。
3. 建立力的平衡方程根据力的平衡条件,可以得到悬臂部分的平衡方程:R - F = 0,其中F为梁的自重。
4. 建立变形方程根据梁的几何形状和约束条件,可以建立悬臂部分的变形方程,得到悬臂部分的弯矩和挠度。
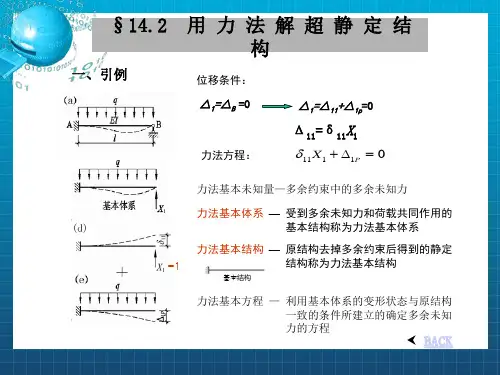
力法求解超静定结构的步骤:
1、先判定其超静定次数,(含多余联系数),去掉原结构的所有多余联系,用相应的多余力代替,得一静定的基本结构(形式可能很多,尽量简单);
2、根据基本结构在原荷载及所有多余力共同作用下,在每一个去掉的多余联系处位移和原结构相应位置的已知位移相同,建立力法典型方程;
3、求方程所有系数和自由项,(静定结构的位移计算)积分法或图乘法,写出基本结构X i∑=在单位力及原荷载分别单独作用下的内力表达式或作出内力图;
4、解方程,求出所有多余力;
5、作最后内力图(静定结构的计算问题)梁、刚架:M N P 组合结构:
6、校核,两方面:平衡条件(截取结构中+ X i N i ∑=M P →Q→N 桁架:N +M i M=0 )∑Y=0 ∑ X=0 ∑刚结点、杆件或某一部分,应满足;变形协调条件(多余约束处位移是否与已知位移相等)
注:选取基本结构的原则:
(1)基本结构为静定结构;
(2)选取的基本结构应使力法方程中系数和自由项的计算尽可能方便,并尽量使较多的副系数和自由项为0
(3)较易绘M 图及MP 图。
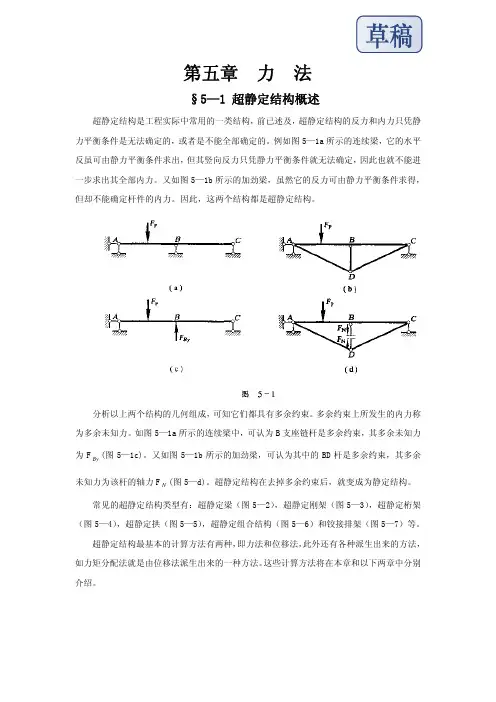
第五章 力 法§5—1 超静定结构概述超静定结构是工程实际中常用的一类结构,前已述及,超静定结构的反力和内力只凭静力平衡条件是无法确定的,或者是不能全部确定的。
例如图5—1a所示的连续梁,它的水平反虽可由静力平衡条件求出,但其竖向反力只凭静力平衡条件就无法确定,因此也就不能进一步求出其全部内力。
又如图5—1b所示的加劲梁,虽然它的反力可由静力平衡条件求得,但却不能确定杆件的内力。
因此,这两个结构都是超静定结构。
分析以上两个结构的几何组成,可知它们都具有多余约束。
多余约束上所发生的内力称为多余未知力。
如图5—1a所示的连续梁中,可认为B支座链杆是多余约束,其多余未知力(图5—1c)。
又如图5—1b所示的加劲梁,可认为其中的BD杆是多余约束,其多余为FBy未知力为该杆的轴力F(图5—d)。
超静定结构在去掉多余约束后,就变成为静定结构。
N常见的超静定结构类型有:超静定梁(图5—2),超静定刚架(图5—3),超静定桁架(图5—4),超静定拱(图5—5),超静定组合结构(图5—6)和铰接排架(图5—7)等。
超静定结构最基本的计算方法有两种,即力法和位移法,此外还有各种派生出来的方法,如力矩分配法就是由位移法派生出来的一种方法。
这些计算方法将在本章和以下两章中分别介绍。
§5—2 力法的基本概念在掌握静定结构内力和位移计算的基础上,下面来寻求分析超静定结构的方法。
先举一个简单的例子加以阐明。
设有图5—8a 所示一端固定另一端铰支的梁,它是具有一个多余约束的超静定结构。
如果以右支座链杆作为多余约束,则去掉该约束后,得到一个静定结构,该静定结构称为力法的基本结构。
在基本结构上,若以多余未知力代替所去约束的作用,并将原有荷载q 作用上去,则得到如图5—8b 所示的同时受荷载和多余未知力作用的体系。
该体系称为力法的基本体系。
在基本体系上的原有荷载是已知的,而多余力是未知的。
因此,只要能设法先求出多余未知力,则原结构的计算问题即可在静定的基本体系上来解决。
一次超静定结构的力法典型方程在我们生活的这个世界里,结构物无处不在,房子、桥梁、甚至那看似简单的秋千,都跟结构有着千丝万缕的关系。
说到超静定结构,哎呀,这可是一个既神秘又让人抓狂的概念。
你可能会想,什么是超静定?是不是跟超人有关系?其实不是,超静定结构的意思就是,它的稳定性和受力情况并不是那么简单,通过一些力法的经典方程,我们能一探究竟。
想象一下,你的朋友跟你说他要建个大房子,你的第一反应肯定是:这得稳得住呀,风一吹可别塌了。
说到这里,超静定结构就显得尤为重要了。
好了,咱们来聊聊力法,听起来挺高大上的,但其实呢,就是用简单的力的平衡来搞定这些复杂的结构。
想象一下,你在玩积木,拼拼凑凑,突然发现有个地方歪了,这可怎么办?这时候,你得用一些巧妙的办法来调整。
力法的经典方程就像是你的调节工具,它帮助你找出哪些地方受力不均,哪里需要加固。
就像人喝酒,喝多了总得找个地方坐下,太累了可不行。
大家知道吗,超静定结构其实可以用几个基本的力法方程来描述。
我们得了解个基本的概念,结构的自由度。
自由度听起来高深,其实就是结构能在什么情况下发生变形。
就像一只小鸟,想飞就飞,想栖就栖,但超静定结构可没这么容易。
这里有个小诀窍,咱们常用的牛顿第二定律就可以派上用场,这可是万金油,万能的。
简单来说,就是力等于质量乘以加速度,哎,这可真是个简单粗暴的真理。
再说了,力法的方程其实就是在用一些简单的数学式子,来帮我们找出各个构件的受力情况。
你想啊,建筑结构就像一个大家庭,每个成员都有自己的责任和角色。
如果有人分担过多的压力,那家里可就不太平了。
想象一下,家里的洗衣机坏了,大家伙儿都在忙,结果呢,阳台的窗户也跟着受到了影响,哎,这可就麻烦了。
力法就是要确保每个成员都在适当的负荷下,不然可就得重新分配任务了。
你看,在这些方程中,有时候会出现一些神秘的符号,比如力的方向、大小,甚至是一些角度。
这就像打麻将,牌面上的每一张都要考虑清楚。
你不能只想着自己要胡,得看看别人怎么出牌。
力法、位移法求解超静定结构讲解
超静定结构是指在结构中存在多余的支座或者杆件,使得结构的自由度小于零,即结构无法通过静力学方法求解。
在这种情况下,我们需要采用力法或者位移法来求解结构的内力和位移。
力法是指通过假设结构内力的大小和方向,来求解结构的内力和位移的方法。
在力法中,我们需要假设结构内力的大小和方向,然后通过平衡方程和变形方程来求解结构的内力和位移。
力法的优点是计算简单,适用于简单的结构,但是对于复杂的结构,力法的假设可能会导致误差较大。
位移法是指通过假设结构的位移,来求解结构的内力和位移的方法。
在位移法中,我们需要假设结构的位移,然后通过平衡方程和变形方程来求解结构的内力和位移。
位移法的优点是适用于复杂的结构,可以准确地求解结构的内力和位移,但是计算较为繁琐。
在实际工程中,我们通常采用力法和位移法相结合的方法来求解超静定结构。
首先,我们可以通过力法来确定结构的内力大小和方向,然后再通过位移法来求解结构的位移。
这种方法可以充分利用力法和位移法的优点,减小误差,提高计算精度。
超静定结构的求解需要采用力法和位移法相结合的方法,通过假设结构的内力和位移,来求解结构的内力和位移。
在实际工程中,我们需要根据具体情况选择合适的方法,以保证计算精度和效率。
力法求解超静定结构
超静定结构是指其支反力个数大于等于结构模式自由度的结构,
也就是说,该结构中的支撑点不够,会产生多余的支反力,这就导致
了该结构的解题难度非常大。
但是,采用力法求解可以有效地解决这
个问题。
首先,可以采用静力平衡方程来确定结构中的支反力。
静力平衡
方程是通过平衡结构中的所有受力和力矩,来确定支反力的方程。
它
的基本形式为ΣF=0和ΣM=0,其中ΣF表示所有力的总和,ΣM表示
所有力的总力矩。
然后,要使用结构分析的基本原理,即支点位移法。
支点位移法
通过改变结构中某些支点的位置,并计算相应的支反力和位移量,来
求解结构中的位移和反力。
在计算反力时,要注意支点位移前后对结
构的影响,以及反力大小的变化等因素。
此外,在解决超静定结构时,还要注意结构中梁、柱等构件的弹
性变形。
这些变形对结构的位移和反力也会产生影响,因此需要考虑
其中的因素。
最后,要注意力法求解的精度问题。
由于超静定结构中存在多余
的支反力,因此求解过程中难免会产生误差。
为了提高计算精度,可
以采用迭代的方法,在多次迭代中逐步优化计算结果,提高求解精度。
总之,采用力法求解超静定结构需要掌握一定的理论基础和实践技巧,同时要注意结构中的弹性变形、支点移动等因素,并采用迭代的方法进行计算,以提高计算精度。
这些掌握了的技巧和方法将在实际工程中具有指导意义。
第八章力法本章主要内容1)超静定结构的超静定次数2)力法的解题思路和力法典型方程(显然力法方程中所有的系数和自由项都是指静定基本结构的位移,可以由上一章的求位移方法求出(图乘或积分))3)力法的解题步骤以及用于求解超静定梁刚架桁架组合结构(排架)4)力法的对称性利用问题,对称结构的有关概念四点结论5)超静定结构的位移计算和最后内力图的校核6)§8-1超静定结构概述一、静力解答特征:静定结构:由平衡条件求出支反力及内力;超静定结构的静力特征是具有多余力,仅由静力平衡条件无法求出它的全部(有时部分可求)反力及内力,须借助位移条件(补充方程,解答的唯一性定理)。
二、几何组成特征:(结合例题说明)静定结构:无多余联系的几何不变体超静定结构:去掉其某一个或某几个联系(内或外),仍然可以是一个几何不变体系,如桁架。
即:超静定结构的组成特征是其具有多余联系,多余联系可以是外部的,也可能是内部的,去掉后不改变几何不变性。
多余联系(约束):并不是没有用的,在结构作用或调整结构的内力、位移时需要的,减小弯矩及位移,便于应力分布均匀。
多余求知力:多余联系中产生的力称为三、超静定结构的类型(五种)超静定梁、超静定刚刚架、超静定桁架、超静定拱、超静定组合结构四、超静定结构的解法综合考虑三个方面的条件:1、平衡条件:即结构的整体及任何一部分的受力状态都应满足平衡方程;2、几何条件:也称变形条件、位移条件、协调条件、相容条件等。
即结构的变形必须符合支承约束条件(边界条件)和各部分之间的变形连续条件。
3、物理条件:即变形或位移与内力之间的物理关系。
精确方法:力法(柔度法):以多余未知力为基本未知量位移法(刚度法):以位移为基本未知量。
力法与位移法的联合应用:力法与位移法的混合使用:混合法近似方法:力矩分配法、矩阵位移法、分层总和法、D值法、反弯点法等本章主要讲力法。
五、力法的解题思路(结合例子)把不会算的超静定结构通过会算的基本结构来计算。
力法求解超静定结构的步骤在结构力学中,超静定结构是指不仅能同时满足静力学平衡条件,而且还有多余的约束力,因此外加一个作用力时其约束力不会被破坏。
力法求解超静定结构是求解这类结构体系的一种有效方法,下面是力法求解超静定结构的步骤。
步骤1:建立超静定结构的外部受力与内力等效关系超静定结构的约束力有多余的约束力,即力学平衡条件所无法求解的约束力。
因此,我们需要建立超静定结构的外部受力与内力等效关系,通过已知的受力条件推导约束力的作用,确定超静定结构的内力状态。
步骤2:建立超静定结构的位移方程或应力方程建立超静定结构的位移方程或应力方程,是力法求解超静定结构的关键步骤之一。
位移方程的建立可以基于杆件测量法或截面受力法,应力方程的建立可以基于材料本构关系和边界条件等。
步骤3:解超静定结构的位移方程或应力方程解超静定结构的位移方程或应力方程,可以采用数值解法和解析解法两种方法。
数值解法主要包括矩阵法、有限元法、边界元法等,解析解法则借助微积分和常微分方程等数学方法进行求解。
步骤4:计算超静定结构的内力与应变通过已解出的位移或应力,可以计算得到超静定结构的内力状态和应变分布。
同时,超静定结构的内力状态也可以用于检验该结构的可靠性以及对超静定结构进行所需的修理和维护。
步骤5:检验超静定结构的可靠性超静定结构的可靠性检验,是通过计算得到的内力状态来评估该结构是否满足设计和使用要求的一项重要工作。
该步骤可以基于强度理论、变形理论等方法,利用计算机强度分析软件来实现。
,力法求解超静定结构是求解这类结构体系的一种常用方法。
通过以上步骤的实施,我们可以获得超静定结构的内力状态,进而检验该结构的可靠性。
第十章超静定结构计算力法一.超静定次数确定1、 超静定结构的特性:与静定结构比较,超静定结构有如下特性:静定结构 超静定结构 几何特性 无多余约束的几何不变体系 有多余约束的几何不变体系静力特性满足平衡条件内力解答是唯一的,即仅由平衡条件就可求出全部内力和反力。
超静定结构满足平衡条件内力解答有无穷多种,即仅由平衡条件求不出全部内力和反力,还必须考虑变形条件。
非荷载外因的影响 不产生内力 产生了自内力内力与刚度的关系 无关荷载引起的内力与各杆刚度的比值有关,非载载外因引起的内力与各杆刚度的绝对值有关。
内力超静定,约束有多余,是超静定结构区别于静定结构的基本特点。
2、超静定次数的确定: 结构的超静定次数为其多余约束的数目,因此上,结构的超静定次数等于将原结构变成静定结构所去掉多余约束的数目。
在超静定结构上去掉多余约束的基本方式,通常有如下几种:(1)断一根链杆、去掉一个支杆、将一刚接处改为单铰联接、将一固定端改为固定铰支座,相当于去掉一个约束。
(2)断一根弯杆、去掉一个固定端,相当于去掉三个约束(3)开一个单铰、去掉一个固定铰支座、去掉一个定向支座,相当于去掉两个约束。
3、几点注意:①由图10-1结构的分析可得出结论:一个无铰闭合框有三个多余约束,其超静定次数等于三。
对于无铰闭合框结构其超静定次数=3×闭合框数。
如图10-2 所示结构的超静定次数为3×5=15次;对于带铰闭合框结构其超静定次数=3×闭合框数-结构中的单铰数(复铰要折算成单铰)如图10-3所示结构的超静 定次数为3×5-(1+1+3)=15次。
D点是连接四个刚片的复铰,相当于(4-1)=3个单铰。
②一结构的超静定次数是确定不变的,但去掉多余约束的方式是多种多样的。
如图10-1结构。
③在确定超静定次数时,要将内外多余约束全部去掉。
如图10-4结构外部1次超静定,内部6次超静定,结构的超静定次数是7。
1超静定结构的解法超静定结构是指结构的支座反力数目多于静力平衡方程的数目,即结构的自由度多余零,不能通过直接求解静力平衡方程得到结构的内力、位移等参数。
因此,需要使用超静定结构的解法来求解结构的响应。
超静定结构的解法主要有两种:力法和位移法。
在这里,我将分别介绍这两种方法的基本原理。
1.力法力法是指通过引入虚功原理,利用未知内力的线性平衡方程组与已知荷载、位移或位移力系数之间的关系,构建方程并求解未知内力的方法。
使用力法解决超静定结构的基本步骤如下:(1)确定支座反力。
根据结构的约束条件,计算支座反力数目;(2)选择剪力或弯矩作为未知内力。
在超静定结构中,选择剪力或弯矩作为未知内力比较常见;(3)建立线性平衡方程组。
将剪力或弯矩作为未知量,根据结构的几何条件和约束条件,建立线性平衡方程组;(4)引入荷载、位移或位移力系数。
根据结构的受力情况,将已知荷载、位移或位移力系数引入线性平衡方程组;(5)求解未知内力。
通过求解线性平衡方程组,得到未知内力。
2.位移法位移法是指通过引入位移的概念,利用位移与剪力/弯矩之间的关系,将超静定结构的内力求解问题转化为线性代数方程组的求解问题。
使用位移法解决超静定结构的基本步骤如下:(1)确定支座反力。
根据结构的约束条件,计算支座反力数目;(2)选择支座位移为未知量。
在超静定结构中,支座位移比较容易确定;(3)建立位移-力关系方程。
根据结构的几何条件和材料性质,建立位移-力关系方程,将剪力或弯矩表示为位移的函数;(4)引入荷载或位移。
根据结构的受力条件,将已知荷载或位移引入位移-力关系方程;(5)求解未知位移。
通过求解位移-力关系方程,得到未知位移;(6)求解未知内力。
将未知位移代入位移-力关系方程,求解出未知内力。
需要注意的是,在力法和位移法中,由于超静定结构的自由度数目大于零,未知内力或未知位移存在无穷多个解。
因此,需要加入合理的边界条件,如位移边界条件、力边界条件等,来确定唯一的解。
力法、位移法求解超静定结构讲解超静定结构是指在静力学计算中具有过多约束的结构体系,其问题在于不能通过传统的静力学方法直接计算出结构体系的内力以及位移的分布情况,需要利用力法或者位移法来求解超静定结构。
力法是指将结构体系的内力分配给各个构件,然后根据各个构件的受力情况和变形情况,逐步推导出结构体系的内力和位移分布情况的一种方法。
其基本思想是通过外部荷载作用下的内力分配,将超静定结构分解成多个静定结构分析,同时通过协调各个分析时的界面条件,进行内力和位移的匹配,最终得到了超静定结构的内力和位移分布情况。
具体实现步骤如下:1. 选定一个自由图,并对该自由图进行划分,将超静定结构分成多个静定结构,其中每个静定结构的节点数均满足有一个自由度。
分割完毕后,确定每个静定结构的支座反力,然后由每个静定结构自己采用传统的静力学原理分析,并得到各自的内力和位移。
2. 对于静定结构之间的相互配合,需要根据结构体系的受力变形情况建立相互之间的协调关系。
最常用的协调方法是确定静定结构之间的界面条件,如节点位移和节点荷载的相等,以及弹簧刚度之和等于零。
3. 在确定了静定结构之间的界面条件后,就可以获得超静定结构的结构内力分布,接下来需要计算出结构的位移分布。
这一步可以通过位移影响系数法进行求解,具体来说,先在静定结构中确定一个位移分量,然后根据约束条件求得其余节点的位移分量,最终获得超静定结构的位移分布。
相比于力法,位移法的思路更加简洁明了,具体步骤如下:1. 建立超静定结构的初始刚度方程,包括构件中的整体刚度和节点位移自由度的边界条件等。
2. 将超静定结构受到的外载按照一定的规律进行分配,使得该结构从受力变形的点出发经过一系列刚度修正后,其总体刚度等于原结构的刚度。
这个修正过程是迭代的,一般采用迭代矩阵求逆的方式进行求解。
3. 当总体刚度修正后,结构的总位移就变为了一个已知量。
根据节点位移自由度的边界条件,可以直接解出各节点的位移分量。