调速系统转速反馈系数的整定
- 格式:doc
- 大小:7.60 MB
- 文档页数:60
装订实验报告课程名称:电力电子技术指导老师:年珩赵建勇成绩:实验名称:双闭环晶闸管不可逆直流调速系统实验类型:一、实验目的和要求(必填)二、实验内容和原理(必填)三、主要仪器设备(必填)四、操作方法和实验步骤五、实验数据记录和处理六、实验结果与分析(必填)七、讨论、心得一、实验目的和要求1.了解双闭环不可逆直流调速系统的原理、组成及各主要单元部件的原理。
2.掌握双闭环不可逆直流调速系统的调试步骤、方法及参数的整定。
3.研究调节器参数对系统动态特性的影响。
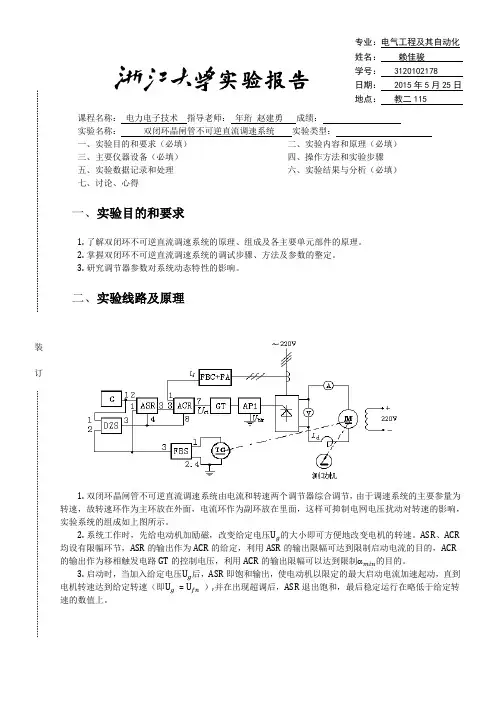
二、实验线路及原理1.双闭环晶闸管不可逆直流调速系统由电流和转速两个调节器综合调节,由于调速系统的主要参量为转速,故转速环作为主环放在外面,电流环作为副环放在里面,这样可抑制电网电压扰动对转速的影响,实验系统的组成如上图所示。
2.系统工作时,先给电动机加励磁,改变给定电压U g的大小即可方便地改变电机的转速。
ASR、ACR均设有限幅环节,ASR的输出作为ACR的给定,利用ASR的输出限幅可达到限制启动电流的目的,ACR的输出作为移相触发电路GT的控制电压,利用ACR的输出限幅可以达到限制 min的目的。
3.启动时,当加入给定电压U g后,ASR即饱和输出,使电动机以限定的最大启动电流加速起动,直到电机转速达到给定转速(即U g= U fn),并在出现超调后,ASR退出饱和,最后稳定运行在略低于给定转速的数值上。
专业:电气工程及其自动化姓名:赖佳骏学号: 3120102178日期: 2015年5月25日地点:教二115三、实验内容1.各控制单元测试。
2.测定开环机械特性及高、低速时完整的系统闭环静态特性n=f(Id),测定闭环控制特性n=f(Id)。
3.研究系统突加给定,以及突加负载、突降负载时的系统静态及动态特性。
4.观察、记录系统动态波形。
四、实验设备1.MCL现代运动控制技术实验台主控屏。
2.给定、零速封锁器、速度变换器、速度调节器、电流调节器组件挂箱。

《运动控制系统》实验指导书逄海萍刘建芳编青岛科技大学自动化与电子工程学院电气工程教研室实验一晶闸管不可逆直流调速系统主要单兀调试,,1实验二不可逆单闭环直流调速系统静特性的研究,,4实验三双闭环晶闸管不可逆直流调速系统,,,,,8实验四双闭环可逆直流脉宽调速系统,,,,,,15实验一晶闸管不可逆直流调速系统主要单元调试一、实验目的1 •熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。
2 •掌握直流调速系统主要单元部件的调试步骤和方法。
二、实验内容1. 转速调节器ASR和电流调节器调节器ACR的调试2 .触发单元的调试3 .主电路的调试三、实验设备及仪器1 . MCL系列教学实验台主控制屏。
2. MCL--31 组件(适合MCL--111)3. MCL--34 组件。
4. MEL-11 挂箱5. 双踪示波器6 .万用表四、注意事项1 .双踪示波器的两个探头地线通过示波器外壳短接,故在使用时必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。
2 .电流表要与电动机的电枢串联,严禁并联。
3 .改接线路前断开电源。
4 .脉冲观察孔不能于晶闸关门极相连。
五、实验方法及步骤1. 速度调节器(ASR)的调试(1) 调整ASR的输出限幅值①“ 5”、“ 6”端接MEL-11挂箱电容(7卩),使ASR调节器为PI调节器,将Ug接到ASR 的1端,零速封锁(DZS)的3端接到ASR的4端,零速封锁开关打到“解除”。
②接通“低压直流电源”,增加给定,调节ASR的RP1,RP2,使ASR的输出限幅值为± 3V。
③给定调到0,断开“低压直流电源”。
(2) 测定输入输出特性①将反馈网络中的电容短接(“ 5”、“6”端短接),使ASR调节器为P调节器。
(1)主电路未通电, 板上的直流低压电源引到用示波器观察 MCL — 33的六个脉冲观察孔,应有双窄脉冲,且间隔均匀,幅值 ② 接通“低压直流电源”,调节给定电位器,向调节器输入端逐渐加入正负电压,测 出相应的输出电压,直至输出达到限幅值,并画出输入输出特性曲线。
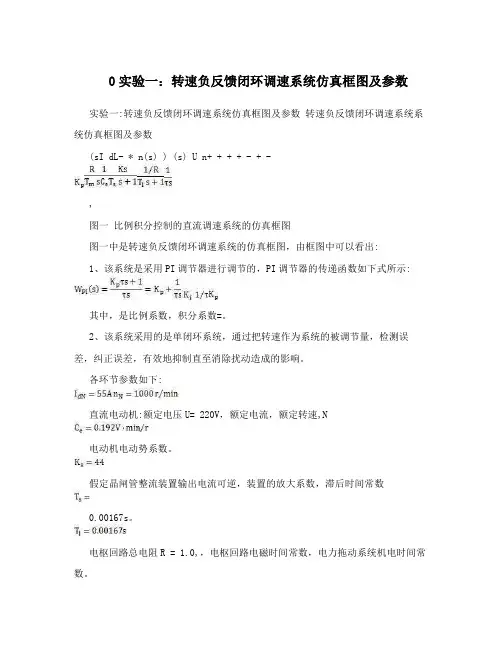
0实验一:转速负反馈闭环调速系统仿真框图及参数实验一:转速负反馈闭环调速系统仿真框图及参数转速负反馈闭环调速系统系统仿真框图及参数(sI dL- * n(s) ) (s) U n+ + + + - + -,图一比例积分控制的直流调速系统的仿真框图图一中是转速负反馈闭环调速系统的仿真框图,由框图中可以看出:1、该系统是采用PI调节器进行调节的,PI调节器的传递函数如下式所示:其中,是比例系数,积分系数=。
2、该系统采用的是单闭环系统,通过把转速作为系统的被调节量,检测误差,纠正误差,有效地抑制直至消除扰动造成的影响。
各环节参数如下:直流电动机:额定电压U= 220V,额定电流,额定转速,N电动机电动势系数。
假定晶闸管整流装置输出电流可逆,装置的放大系数,滞后时间常数0.00167s。
电枢回路总电阻R = 1.0,,电枢回路电磁时间常数,电力拖动系统机电时间常数。
转速反馈系数, , ,,,,。
对应额定转速时的给定电压。
转速负反馈闭环调速系统的仿真1. 仿真模型的建立比例积分控制的无静差直流调速系统的仿真模型进入MATLAB,并打开SIMULINK模块浏览器窗口,建立一个新的模型,并复制入相应模块,修改模块的参数.当其中PI调节器的至暂定为,1/, = 11.43时,把从10.0修改为0.6后控制参数的仿真结果:图1 电枢电流随时间变化的规律图2电机转速随时间变化的规律由图1可知电流的最大值为230A左右,显然不满足实际要求,故后面需对此进行处理,采用带电流截止负反馈环节的直流调速系统。
其中,由图2 scope输出结果中可以得出该控制系统的最大超调量M、上升时间 ,调p整时间,取值分别为:M= 108r/min, = 0.12s, = 0.28s(估计值) p2. PI调节器参数的调整改变PI调节器的参数,并在启动仿真,分别从仿真曲线中得到的最大超调量及调整时间,相互间进行比较,如下表所示最大超调量比例系数积分系数调整时间(s) M(r/min) p0.25 3 0 >0.6 0.56 3 0 >0.6 0.56 11.43 108 0.28 0.8 11.43 63 0.28 0.8 15 152 0.23由表中可以看出,改变PI调节器的参数,可以得到转速响应的超调量不一样、调节时间不一样的响应曲线。
习题四4.1双闭环调速系统的ASR 和ACR 均为PI 调节器,设系统最大给定电压*nmU =15V ,转速调节器限幅值为*im U =15V , n N =1500r/min ,N I =20A ,电流过载倍数为2,电枢回路总电阻R =2Ω,s K =20,e C =0.127V·min/r ,求:(1)当系统稳定运行在*n U =5V ,dL I =10A 时,系统的n 、n U 、*i U 、i U 和c U 各为多少?(2)当电动机负载过大而堵转时,*i U 和c U 各为多少?解: (1)150.01min/1500/minnm N U VV r n r α=== 5500/min 0.01min/nU Vn r V rα===*150.375/40im dm U V V A I Aβ===*0.37510 3.75i d U I V β==⨯= 0.37510 3.75i d U I V β==⨯=0.1275001024.17520e d c s C n I R U V K +⨯+⨯=== (2)堵转时,V I U dm i 15*==β, 0.1270402420e d c s C n I R U V K +⨯+⨯=== 4.2 在转速、电流双闭环调速系统中,两个调节器ASR ,ACR 均采用PI 调节器。
已知参数:电动机:N P =3.7kW ,N U =220V ,N I =20A ,N n =1000 r/min ,电枢回路总电阻R =1.5Ω,设cm im nmU U U ==** =8V ,电枢回路最大电流dm I =40A,电力电子变换器的放大系数s K =40。
试求:(1)电流反馈系数β和转速反馈系数α。
(2)当电动机在最高转速发生堵转时的,0d U c i i U U U ,,*值。
解:1)*80.32/40im dm U VV A I Aβ===80.008min/1000/minnm N U VV r n r α=== 2) 040 1.560d d dm U E I R I R V ∑∑=+⨯=⨯=⨯=这时: *8,0n n U V U ==,ASR 处于饱和,输出最大电流给定。
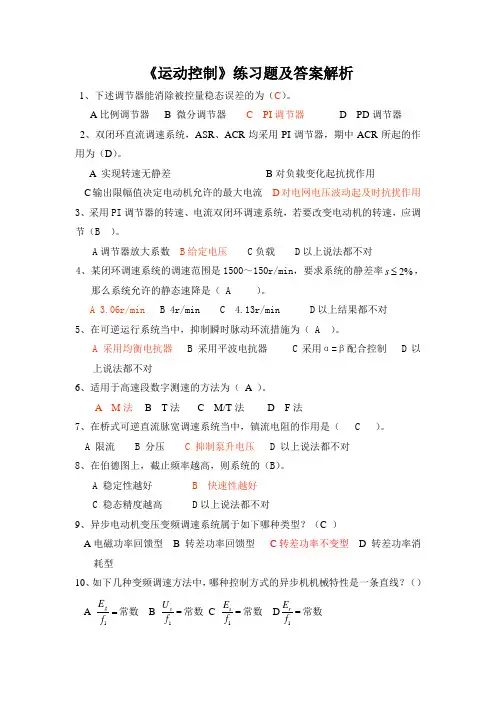
《运动控制》练习题及答案解析1、下述调节器能消除被控量稳态误差的为(C )。
A 比例调节器B 微分调节器C PI 调节器D PD 调节器2、双闭环直流调速系统,ASR 、ACR 均采用PI 调节器,期中ACR 所起的作用为(D )。
A 实现转速无静差B 对负载变化起抗扰作用C 输出限幅值决定电动机允许的最大电流D 对电网电压波动起及时抗扰作用3、采用PI 调节器的转速、电流双闭环调速系统,若要改变电动机的转速,应调节(B )。
A 调节器放大系数B 给定电压C 负载D 以上说法都不对4、某闭环调速系统的调速范围是1500~150r/min ,要求系统的静差率2%s ≤,那么系统允许的静态速降是( A )。
A 3.06r/minB 4r/minC 4.13r/minD 以上结果都不对5、在可逆运行系统当中,抑制瞬时脉动环流措施为( A )。
A 采用均衡电抗器B 采用平波电抗器C 采用α=β配合控制D 以上说法都不对6、适用于高速段数字测速的方法为( A )。
A M 法B T 法C M/T 法D F 法7、在桥式可逆直流脉宽调速系统当中,镇流电阻的作用是( C )。
A 限流B 分压C 抑制泵升电压D 以上说法都不对8、在伯德图上,截止频率越高,则系统的(B )。
A 稳定性越好B 快速性越好C 稳态精度越高D 以上说法都不对9、异步电动机变压变频调速系统属于如下哪种类型?(C )A 电磁功率回馈型B 转差功率回馈型C 转差功率不变型D 转差功率消耗型10、如下几种变频调速方法中,哪种控制方式的异步机机械特性是一条直线?() A 1gE f =常数 B 1s U f =常数 C 1s E f =常数 D 1r E f =常数11、不属于抑制电流脉动的措施的是(。
DA 增加整流电路相数B 采用多重化技术C 设置平波电抗器D 设置环流电抗器12、 输入为零时输出也为零的调节器是(A )。
A P 调节器B I 调节器C PI 调节器D PID 调节器13、在同样的负载扰动下,闭环系统的转速降落cl n 与开环下的op n 之比为( D )。
2012~2013年(本)1、平波电抗器的大小是如何选择的?答:一般按低速轻载时保证电流连续的条件来选择,通常首先给定最小电流I(以A为单位),再利用它计算所需的总电感(以mH为单位).减去电枢电感,即得平波电抗应有的电感值。
2、转速负反馈单闭环有静差调速系统中,电枢电阻、转速反馈系数,这些参数变化时系统是否有调节作用?为什么?答:在电压负反馈单闭环有静差调速系统中,当放大器的放大系数Kp发生变化时系统有调节作用再通过反馈控制作用,因为他们的变化最终会影响到转速,减小它们对稳态转速的影响。
当电动机励磁电流、电枢电阻Ra发生变化时仍然和开环系统一样,因为电枢电阻处于反馈环外。
当供电电网电压发生变化时系统有调节作用。
因为电网电压是系统的给定反馈控制系统完全服从给定。
当电压反馈系数γ发生变化时,它不能得到反馈控制系统的抑制,反而会增大被调量的误差.反馈控制系统所能抑制的只是被反馈环包围的前向通道上的扰动。
(无调节作用.因为反馈控制系统所能抑制的只是被反馈包围的前向通道上的扰动。
)3、对于经常正、反运行的调速系统,理想的起动过渡过程应什么样?答:始终保持电流(电磁转矩)为允许的最大值,使调速系统以最大的加(减)速度运行。
当到达稳态转速时,最好使电流立即降下来,使电磁转矩与负载转矩相平衡,从而迅速转入稳态运行.(起动电流呈矩形波,转速按线性增长)4、什么是软起动器?答:当电压降低时,起动电流将随电压成正比地降低,从而可以避开起动电流冲击的高峰。
起动转矩与电压的平方成正比,起动转矩的减小将比起动电流的降低更多,降压起动时又会出现起动转矩不够的问题。
降压起动只适用于中、大容量电动机空载(或轻载)起动的场合。
5、对于通用变频器,所谓的“通用”有什么含义?答:一是可以和通用的笼型异步电动机配套使用;二是具有多种可供选择的功能,适用于各种不同性质的负载.6、什么是正弦脉宽调制技术?答:由它们的交点确定逆变器开关器件的通断时刻,从而获得幅值相等、宽度按正弦规律变化的脉冲序列,这种调制方法称作正弦波脉宽调制7、比例积分控制中比例和积分部分各有什么特点?答:比例部分能迅速响应控制作用,积分部分则最终消除稳态偏差。
实验一晶闸管直流调速系统参数和环节特性的测定一、实验学时:3学时二、实验类型:验证性三、开出要求:必修四、实验目的:1.了解电力电子及电气传动教学实验台的结构及布线情况。
2.熟悉晶闸管直流调速系统的组成及其基本结构。
3.掌握晶闸管直流调速系统参数及反馈环节测定方法。
五、实验原理:晶闸管直流调速系统由晶闸管整流调速装置,平波电抗器,电动机——发电机组等组成。
本实验中,整流装置的主电路为三相桥式电路,控制回路可直接由给定电压Ug作为触发器的移相控制电压,改变U g的大小即可改变控制角,从而获得可调的直流电压和转速,以满足实验要求。
六、实验条件:1.教学实验台主控制屏MCL-32T。
2.MCL—33组件3.MEL—03组件4.电机导轨及测速发电机(或光电编码器)5.直流电动机M036.双踪示波器7.万用表七、实验步骤:(一)安全讲解实验指导人员讲解自动控制系统实验的基本要求,安全操作和注意事项。
介绍实验设备的使用方法。
(二)操作步骤1.电枢回路电阻R的测定电枢回路的总电阻R包括电机的电枢电阻R a,平波电抗器的直流电阻R L和整流装置的内阻R n,即R=R a+R L+R n为测出晶闸管整流装置的电源内阻,可采用伏安比较法来测定电阻,其实验线路如图1-1所示。
将变阻器R D(可采用两只900Ω电阻并联)接入被测系统的主电路,并调节电阻负载至最大。
测试时电动机不加励磁,并使电机堵转。
NMCL-31的给定电位器RP1逆时针调到底,使U ct=0。
调节偏移电压电位器RP2,使Ud=0。
合上主电源,即按下主控制屏绿色“闭合”开关按钮,这时候主控制屏U、V、W端有电压输出,调节U g使整流装置输出电压U d=(30~70) U ed(可为110V),然后调整R D使电枢电流为(80~90)%I ed ,读取电流表A 和电压表V 的数值为I 1,U 1,则此时整流装置的理想空载电压为U do =I 1R+U 1调节R D ,使电流表A 的读数为40% I ed 。
实验四双闭环不可逆直流调速系统实验一、实验目的(1)了解闭环不可逆直流调速系统的原理、组成及各主要单元部件的原理。
(2)掌握双闭环不可逆直流调速系统的调试步骤、方法及参数的整定。
(3)研究调节器参数对系统动态性能的影响。
二、实验所需挂件及附件三、实验线路及原理许多生产机械,由于加工和运行的要求,使电动机经常处于起动、制动、反转的过渡过程中,因此起动和制动过程的时间在很大程度上决定了生产机械的生产效率。
为缩短这一部分时间,仅采用PI调节器的转速负反馈单闭环调速系统,其性能还不很令人满意。
双闭环直流调速系统是由速度调节器和电流调节器进行综合调节,可获得良好的静、动态性能(两个调节器均采用PI调节器),由于调整系统的主要参量为转速,故将转速环作为主环放在外面,电流环作为副环放在里面,这样可以抑制电网电压扰动对转速的影响。
实验系统的原理框图组成如下:启动时,加入给定电压U g,“速度调节器”和“电流调节器”即以饱和限幅值输出,使电动机以限定的最大启动电流加速启动,直到电机转速达到给定转速(即U g=U fn),并在出现超调后,“速度调节器”和“电流调节器”退出饱和,最后稳定在略低于给定转速值下运行。
系统工作时,要先给电动机加励磁,改变给定电压U g的大小即可方便地改变电动机的转速。
“速度调节器”、“电流调节器”均设有限幅环节,“速度调节器”的输出作为“电流调节器”的给定,利用“速度调节器”的输出限幅可达到限制启动电流的目的。
“电流调节器”的输出作为“触发电路”的控制电压U ct,利用“电流调节器”的输出限幅可达到限制αmax的目的。
在本实验中DJK04上的“调节器I”做为“速度调节器”使用,“调节器II”做为“电流调节器”使用;若使用DD03-4不锈钢电机导轨、涡流测功机及光码盘测速系统和D55-4智能电机特性测试及控制系统两者来完成电机加载请详见附录相关内容。
四、实验内容(1)各控制单元调试。
(2)测定电流反馈系数β、转速反馈系数α。
运动控制系统实验一、实验目的:1) 熟悉和掌握逻辑无环流可逆调速系统的调试方法和步骤;2) 通过实验,分析和研究系统的动、静态特性,并研究调节的参数对动态品质的影响; 3) 通过实验,提高自身实际操作技能,培养分析和解决问题的能力。
二、实验内容:(2)各控制单元调试;(3)整定电流反馈系数β,转速反馈系数α,整定电流保护动作值; (4)测定开环机械特性及高、低时速的静特性)(d I f n =; (5)闭环控制特性)(d I f n =的测定;(6)改变调节器参数,观察、记录电流和速度走动、制动时的动态波形。
三、实验调节步骤:1 双闭环可逆调速系统调试原则: ① 先单元,后系统; ② 先开环,后闭环; ③ 先内环,后外环 ④ 先单向(不可逆),后双向(可逆)。
2 系统开环调试(1) 系统开环调试整定:定相分析:定相目的是根据各相晶闸管在各自的导电范围,触发器能给出触发脉冲,也就是确定触发器的同步电压与其对应的主回路电压之间的正确相位关系,因此必须根据触发器结构原理,主变压器的接线组别来确定同步变压器的接线组别。
(2) Α=90°的整定 (3) 制定移相特性(4) 带动电机整定α和β 3 系统的单元调试(1) ASR 、ACR 和反相器的调零、限幅等(2) 逻辑单元(DLC )的转矩特性和零电流检测的调试 4 电流闭环调试(i R ,i C ,oiC等相关参数的整定)5 转速闭环调试(n R ,n C ,on C 等相关参数的整定)四、触发器的整定(1) 先将DJK02的触发脉冲指示开关拨至窄脉冲位置,合DJK02中的电源开关,用 示波器观察A 相、B 相、C 相的三相锯齿波,分别调节所对应的斜率调节器,使三相锯齿波的斜率一致。
(2) 观察DJK02中VT1~VT6孔的六个双窄脉冲,使间隔均匀,相位间隔60度。
(3) 触发器移相控制特性的整定;如图6-1所示,系统要求当V U ct 0=时,︒=90α,电机应停止不动。
实验九 电流环及电流截止负反馈环节调试、转速环调试一、实验目的l.理解双闭环直流调速系统的结构特点、工作原理和保护环节的作用。
2.掌握双闭环直流调速系统各单元的联接。
3.学会双闭环直流调速系统的调试、性能分析和故障排除。
二、实验设备高自EAD —I 型电力电子与自控系统实验装置万用表双踪示波器直流电动机组三、实验电路1.主电路见图9-l 。
2.整流变压器及同步变压器电路见图9-2。
3.S3B 三相集成触发电路见图9-3。
4.电流调节器与速度调节器见图9-1所示。
四、实验电路的工作原理主电路、整流变压器及同步变压器电路。
S3B 三相集成触发电路工作原理见实验七。
1.双闭环直流调速系统原理双闭环直流调速系统的示意图如图9-2所示。
由图9-2可见,速度和电流双闭环调速系统是由速度调节器ASR 和电流调节器ACR 串接后分成两级去进行控制的,即由ASR 去“驱动”ACR ,再由ACR 去“驱动”触发器。
电流环为内环,速度环为外环。
ASR 和ACR 在调节过程中起着各自不同的作用:电流调节器 ACR 的作用:1)稳定电流,使电流保持在β*i d U I 的数值上,式中β为电流反馈系数。
从而依靠 ACR 的调节作用,可限制最大电流,*im U 为电流调节器给定电压的最大值,调节RP4,即可调节*im U 的大小,亦即调节最大电流dm I 的数值。
2)当电网波动时,ACR 维持电流不变的特性,使电网电压的波动,几乎不对转速产生影响。
3)起动时保证获得允许的最大电流。
4)在转速调节过程中,使电流跟随其给定电压*i U 变化。
图9-1 电流调节器与速度调节器图9-2 双闭环直流调速系统的示意图速度调节器 ASR 的作用:稳定转速,使转速保持在 α/sn U n ≈的数值上。
式中sn U 为速度调节器的给定电压,α为转速反馈系数,调节RP6,即可整定α的数值,因此在负载变化(或参数变化或各环节产生扰动)而使转速出现偏差时,则靠ASR 的调节作用来消除速度偏差,保持转速恒定。
实验二转速、电流双闭环直流调速系统实验二转速、电流双闭环直流调速系统一、实验目的1.了解转速、电流双闭环直流调速系统的组成。
2.掌握双闭环直流调速系统的调试步骤,方法及参数的整定。
3.测定双闭环直流调速系统的静态和动态性能及其指标。
4.了解调节器参数对系统动态性能的影响。
二、实验系统组成及工作原理双闭环调速系统的特征是系统的电流和转速分别由两个调节器控制,由于调速系统调节的主要参量是转速,故转速环作为主环放在外面,而电流环作为副环放在里面,可以及时抑制电网电压扰动对转速的影响。
实际系统的组成如实验图2-1所示。
~FBCFASWTA RgLIdRMGSL DZSSG GUn*ASRUi*UiACRGTUcVTUd0AMSF 220VUnFBSTG实验图2-1 转速、电流双闭环直流调速系统主电路采用三相桥式全控整流电路供电。
系统工作时,首先给电动机加上额定励磁,改*变转速给定电压Un可方便地调节电动机的转速。
速度调节器ASR、电流调节器ACR 均设有*限幅电路,ASR的输出Ui*作为ACR的给定,利用ASR的输出限幅Uim起限制起动电流的作用;ACR的输出Uc作为触发器TG的移相控制电压,利用ACR的输出限幅Ucm起限制α作用。
min的**当突加给定电压Un时,ASR立即达到饱和输出Uim,使电动机以限定的最大电流Idm加*速起动,直到电动机转速达到给定转速(即Un?Un)并出现超调,使ASR退出饱和,最后稳定运行在给定转速(或略低于给定转速)上。
三、实验设备及仪器 1.主控制屏NMCL-322.直流电动机-负载直流发电机-测速发电机组3. NMCL-18挂箱、NMCL-333挂箱及电阻箱 4.双踪示波器5.万用表四、实验内容1.调整触发单元并确定其起始移相控制角,检查和调整ASR、ACR,整定其输出正负限幅值。
2.测定电流反馈系数β和转速反馈系数α,整定过电流保护动作值。
3.研究电流环和转速环的动态特性,将系统调整到可能的最佳状态,画出Id?f(t)和n?f(t)的波形,并估算系统的动态性能指标(包括跟随性能和抗扰性能)。
一.实验目的1.通过对KZ-D系统开环机械特性和闭环机械特性的实测及研究,加深对负反馈控制的基本原理的理解。
2.掌握操作实际系统的方法和必要参数的测定方法。
3.研究系统各参数间的基本关系及各参数变化对系统的影响。
4.加深对比例积分调节器动态传输特性的认识,了解其在无静差自动控制系统中的作用。
5.通过实践掌握工程实践中常见的双闭环无静差调速系统参数设计计算和ST调试方法。
二.实验所需挂件及附件三.实验线路及原理晶闸管直流调速系统由整流变压器、晶闸管整流调速装置、平波电抗器、电动机-发电机组等组成。
在本实验中,整流装置的主电路为三相桥式电路,控制电路可直接由给定电压Ug 作为触发器的移相控制电压Uct,改变Ug的大小即可改变控制角α,从而获得可调的直流电压,以满足实验要求。
实验系统的组成原理图如图1-1所示。
图1-1 实验系统原理图四.实验内容1.测定晶闸管直流调速系统主电路总电阻值R,电感值L,sK, 测定直流电动机电势常数Ce 测定晶闸管直流调速系统机电时间常数TM2.转速调节器的调试,电流调节器的调试3.设计调速系统。
调速指标为D=10,S<10%;测定系统开环机械特性和∆nnom,判断能否满足调速指标;如果不能满足,可采用转速负反馈;计算及整定比例调节器参数、反馈系数;测定闭环系统的机械特性。
4.设计及调试双闭环无静差KZ -D 调速系统要求额定转速时S ≤2%,电流超调量σi %<5%,转速起动到额定转速时,超调量σn ed n %<10%,负载扰动恢复时间小于05.s ,电动机过载倍数λ=12.,电流反馈系数A V 615.4=β。
5.要求完成电流、转速两个调节器的参数设计,并调试系统。
五.预习要求学习教材中有关晶闸管直流调速系统各参数的测定,设计方法。
六.实验方法为研究晶闸管-电动机系统,须首先了解电枢回路的总电阻R 、总电感L 以及系统机电时间常数T M ,这些参数均需通过实验手段来测定,具体方法如下:1.电枢回路总电阻R 的测定电枢回路的总电阻R 包括电机的电枢电阻R a 、平波电抗器的直流电阻R L 及整流装置的内阻R n ,即R = R a 十R L 十R n (1-1)由于阻值较小,不宜用欧姆表或电桥测量,因是小电流检测,接触电阻影响很大,故常用直流伏安法。
调速系统转速反馈系数的整定(副本)专业:自动化班级:2012级2班姓名:***目录引言3 1 直流电机调速系统6 1.1 直流电机调速系统发展 61.2 转速反馈控制的概念82 转速反馈调速系统的基本构成10 2.1DJDK-1型电力电子技术及电机控制实验台10 2.2 实验所需挂箱、电机等设备112.3 导线193 转速反馈调速系统的实验过程20 3.1 开环直流调速系统实验20 3.2 基于P调节器的闭环调速系统实验313.3 基于PI调节器的闭环调速系统实验384 实验结果与分析44 4.1 开环调速系统实验结果分析44 4.2 基于P调节器的转速反馈调速系统实验结果分析45 4.3 基于PI调节器的转速反馈调速系统实验结果分析48结论51 致谢53参考文献56摘要直流电机在起动和制动上有着很好的表现,它适用于在宽范围内平滑调速,并且在先进的、需要快速起动和制动的调速系统中应用广泛。
由于在简单的开环直流调速系统中,电动机负载增加引起的转速降落是由直流电动机的参数决定的,无法改变,为了获得具有高动静态性能指标的直流调速系统,一般情况下,大都会引入反馈环节,形成闭环控制系统,减小转速降落,降低静差率,扩大调速范围。
为了获得更加稳定,响应快速的调速系统,根据自动控制原理,利用天煌DJDK-1型电力电子技术及电机控制实验装置搭建由转速反馈控制的单闭环直流调速系统,与转速变化成正比的电压信号就是此系统的反馈信号,将其与给定电压相比较并放大,作为控制整流桥的触发电路,这样就构成了速度负反馈的闭环系统,可以有效地抑制甚至消除扰动造成的影响。
电机的转速由给定控制,随给定增大而增加,电机的最大转速是被速度调节器输出的最大值所限制的。
对于速度调节器,我们先采用P(比例)调节器,再使用PI(比例积分)调节器,用来解决P调节器对阶跃输入产生的稳态误差。
系统“给定”恒定时,转速变化受到闭环系统抑制,当电机负载变化时,系统能显示出一定的稳定性。
同时,通过记录不同转速反馈系数下,增大电动机负载后转速的变化情况,整定出使用P和PI调节器情况下,使系统更加稳定、快速响应的转速反馈系数均为0.002。
关键词:直流调速;反馈系数;转速;PI调节器;单闭环;控制AbstractDC motor has a good starting and braking performance which is decided by its structural characteristics, and it is appropriate in a wide range of smooth speed, and is widely used in the advanced field of electric drive when it needs speed fast forward and backward. But in the open-loop DC speed control system, the motor speed drop caused by the load increase is determined by the specifications of the DC motor, and it cannot be changed, in order to obtain a DC speed control system with high dynamic and static performance, in normal circumstances, the feedback loop is introduced to form a closed loop control system to reduce speed landing, and to reduce static error rate and expand speed range.In order to obtain a more stable and accurate speed control system, according to the principle of automatic control, Tianhuang DJDK-1 electric motor control electronics and DC speed control system experimental apparatus is adopted to establish the single closed loop DC speed control system, the response of speed changes as a feedback voltage signal is compared with a given voltage signal and be amplified as a control of the rectifier bridge trigger circuit, which constitutes a Speed negative feedback loop system,and it is able to effectively inhibit or even eliminate the influence of the disturbance. The motor speed is determined by a given voltage, the maximum speed of the motor is determined by the speed controller’s limiting output. The speed controller first use P (proportional) controller, and then use the PI (proportional-integral) regulator to eliminate the P-regulator's steady-state error for step input device, making the system "given" constant, the closed-loop system depress speed changes, and when the motor load or supply voltage fluctuations, the system shows a certain degree of stability. At the same time, by recording the feedback coefficient at different speeds, and changes of speed when increasing motor load in P and PI regulator system, to find out a suitable speed feedback coefficient both 0.002 which makes the system more stable and quick response. Keywords:DC speed control;feedback coefficient; speed; PI regulator;single closed loop; control;引言现代运动控制技术均是以各类电动机为基础,通过微机和逻辑电路控制电动机,用电力电子装置作为弱电控制强电的纽带,以自动控制系统和电力电子技术为基础的。
直流调速系统作为运动控制系统最基本的内容,在当代生产生活中起着无法替代的作用[1]。
随着近些年来我国经济的迅速发展和加速现代化,工业,农业生产,人们的日常生活水平提高导致的高需求的出现,使得电机调速系统的精确度要求也越来越高。
如何设计出高效,稳定,节能,成本低廉的直流电机控制系统,成为了工业生产中的重要环节[2]。
目前,直流调速系统已经在几代人的研究和发展之下具有比较完整的理论和相对成熟的实践。
在一些调速性能指标要求不高的场合,开环调速系统就能满足要求,但是开环系统并不具备自我调节的功能,遇到扰动时,会因其系统局限性引起比较大的转速的变化,其机械特性比较“软”,调速范围也较窄,静差率比较差。
因此,对于有着较高要求的传动装置或机械化生产设备,开环调速是无法满足要求的,运行过程中会产生这样或那样的误差,结果总是不尽人意。
因此我们需要采取某些措施以提高系统的静特性和调速性能,使系统响应变得更加快速,更加稳定地运行[3]。
为了设计出可以稳定运行的直流调速系统,更加深入理解其原理以及从发展中创新,针对工程中需要高性能的控制系统,就必须要引入反馈控制环节,这里,稳定转速的话就需要引入转速负反馈,使机械特性变“硬”[4]。
此次设计的思路是,根据自动控制原理,分析得出设计思路。
由于反馈闭环控制系统是按照被控制对象的实际状态与期望状态的偏差被放大后进行控制的系统,因此只要系统出现偏差,其电路就会自动根据偏差进行相应的自我调节。
转速变化的原因是负载的变化,这些变化直接造成系统的波动,表现为转速偏差,显然闭环调速系统能够减少转速降落[5]。
本系统中发电机与电动机同轴连接,从而形成与电动机转速成正比的负反馈电压,并将之与给定电压按照一定途径进行比较后得出所谓的偏差电压,此偏差电压经过放大器放大后作为触发装置的控制电压,从而使转速间接控制整流装置的输出电压,实现输出间接控制输入的闭环控制的特点。
这种系统可以减小负载引起的转速降落,可有效抑制甚至消除扰动对系统产生的影响,维持系统电动机转速稳定[6]。
本实验在人类生产生活的很多领域都具有重要意义。
因直流电动机的结构决定了其可以实现快速启动和快速制动,其非常适合在较宽广的范围内平滑地调速,在电动汽车、矿厂挖掘机、隧道钻机、切割机、3D打印机、多功能电梯等需要高性能自动控制系统的领域中均得到了普遍的应用[7]。
而自改革开放以来,外来技术的引入使直流电机传动装置的发展经历了重大的变革,首先实现了整流器等陈旧落后设备的更新换代,比如晶闸管整流装置慢慢取代了长久以来占据国内直流调速系统市场的水银整流装置,使直流电机调速系统完成了一次大的跃进。
同时,调速系统中的控制器电路也已经慢慢实现高集成化、小型化、高可靠性及低成本[8]。
以上这些先进技术的应用,使直流调速系统的各项性能指标大幅度提高,同时也使其应用范围扩展到国民经济生产中的各个领域。