2直流电动机转速负反馈单闭环调速的静特性(精)
- 格式:doc
- 大小:93.00 KB
- 文档页数:2
南昌大学实验报告学生姓名:学号:专业班级:自动化121班实验类型:■验证□综合□设计□创新实验日期:实验成绩:实验一不可逆单闭环直流调速系统静特性的研究一.实验目的1.研究晶闸管直流电动机调速系统在反馈控制下的工作。
2.研究直流调速系统中速度调节器ASR 的工作及其对系统静特性的影响。
3.学习反馈控制系统的调试技术。
二.预习要求1.了解速度调节器在比例工作与比例—积分工作时的输入—输出特性。
2.弄清不可逆单闭环直流调速系统的工作原理。
三.实验线路及原理见图6-7。
四.实验设备及仪表1.MCL 系列教学实验台主控制屏。
2.MCL—18 组件(适合MCL—Ⅱ)或MCL—31 组件(适合MCL—Ⅲ)。
3.MCL—33(A)组件或MCL—53 组件。
4.MEL-11 挂箱5.MEL—03 三相可调电阻(或自配滑线变阻器)。
6.电机导轨及测速发电机、直流发电机M01(或电机导轨及测功机、MEL—13 组件)。
7.直流电动机M03。
8.双踪示波器。
五.注意事项1.直流电动机工作前,必须先加上直流激磁。
2.接入ASR 构成转速负反馈时,为了防止振荡,可预先把ASR 的RP3 电位器逆时针旋到底,使调节器放大倍数最小,同时,ASR 的“5”、“6”端接入可调电容(预置7μF)。
3.测取静特性时,须注意主电路电流不许超过电机的额定值(1A)。
4.三相主电源连线时需注意,不可换错相序。
5.电源开关闭合时,过流保护发光二极管可能会亮,只需按下对应的复位开关SB1 即可正常工作。
6.系统开环连接时,不允许突加给定信号U g 起动电机。
7.起动电机时,需把MEL-13 的测功机加载旋钮逆时针旋到底,以免带负载起动。
8.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给定为零。
9.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。
运动控制期末必考题⼀、填空题1、直流电动机有三种调速⽅案:(1)调节电枢供电电压U;(2)减弱励磁磁通Φ;(3)改变电枢回路电阻R。
2、当电流⼤到⼀定程度时才出现的电流负反馈,叫做电流截⽌负反馈。
3、额定励磁状态下的直流电动机电枢电流与直流电动机的电磁转矩成正⽐。
4、他励直流电动机的调速⽅法中,调压调速是从基速(额定转速)往下调,在不同转速下容许的输出恒定,所以⼜称为恒转矩调速。
调磁调速是从基速往上调,励磁电流变⼩,也称为弱磁调速,在不同转速时容许输出功率基本相同,称为恒功率调速。
5、直流调速系统的静态性能指标主要包括静差率和调速范围。
6、在⽐例积分调节调节过程中,⽐例部分的作⽤是迅速响应控制,积分部分的作⽤是消除稳态误差。
7、采⽤积分速度调节器的闭环调速系统是⽆静差的。
8、直流调速系统中常⽤的可控直流电源主要有旋转变流机组、静⽌式可控整流器和直流斩波器或脉宽调制变换器三种。
9、所谓稳态是指电动机的平均电磁转矩与负载转矩相平衡的状态。
10、在额定负载下,⽣产⼯艺要求电动机提供的最⾼转速和最低转速之⽐叫做调速范围。
11、负载由理想空载增加到额定值时所对应的转速降落与理想空载转速之⽐叫做静差率。
12、⼀个调速系统的调速范围,是指在最低转速时还能满⾜所需静差率的转速的可调范围。
13、反馈控制的作⽤是抵抗扰动、服从给定。
14、脉宽调制的⽅法是把恒定的直流电源电压调制成幅值相同、频率⼀定、宽度可变脉冲序列,从⽽可以改变平均输出电压的⼤⼩,以调节转速。
15、调速系统的要求有调速、稳速、加,减速。
16、直流电动机在调速过程中,若额定转速相同,则转速越低时,静差率越⼤。
17、在转速、电流双闭环直流调速系统中转速调节器的输出作为电流调节器的输⼊,再⽤电流调节器的输出去控制电⼒电⼦变换器。
18、双闭环调速系统在正常运⾏时, ACR 调节器是不会达到饱和的。
19、反馈控制系统所能抑制的知识被反馈环包围的前向通道上的扰动。
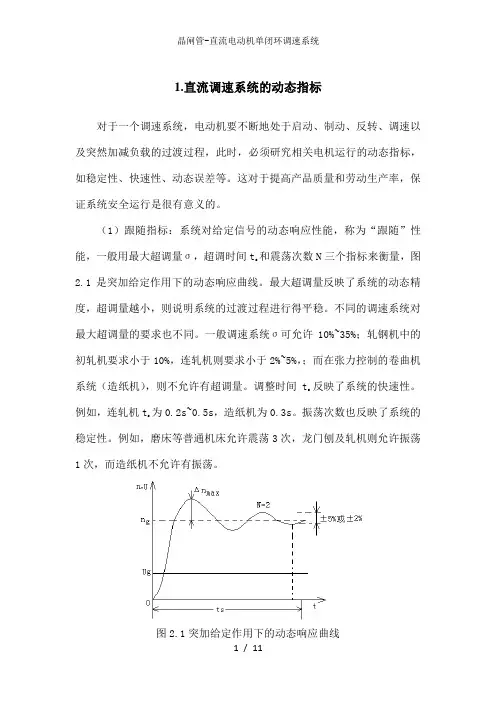
1.直流调速系统的动态指标对于一个调速系统,电动机要不断地处于启动、制动、反转、调速以及突然加减负载的过渡过程,此时,必须研究相关电机运行的动态指标,如稳定性、快速性、动态误差等。
这对于提高产品质量和劳动生产率,保证系统安全运行是很有意义的。
(1)跟随指标:系统对给定信号的动态响应性能,称为“跟随”性能,一般用最大超调量σ,超调时间t和震荡次数N三个指标来衡量,图s2.1是突加给定作用下的动态响应曲线。
最大超调量反映了系统的动态精度,超调量越小,则说明系统的过渡过程进行得平稳。
不同的调速系统对最大超调量的要求也不同。
一般调速系统σ可允许10%~35%;轧钢机中的初轧机要求小于10%,连轧机则要求小于2%~5%,;而在张力控制的卷曲机反映了系统的快速性。
系统(造纸机),则不允许有超调量。
调整时间ts为0.2s~0.5s,造纸机为0.3s。
振荡次数也反映了系统的例如,连轧机ts稳定性。
例如,磨床等普通机床允许震荡3次,龙门刨及轧机则允许振荡1次,而造纸机不允许有振荡。
图2.1突加给定作用下的动态响应曲线(2)抗扰指标:对扰动量作用时的动态响应性能,称为“抗扰”性能。
一般用最大动态速降Δnmax ,恢复时间tf和振荡次数N三个指标来衡量。
用图2.2是突加负载时的动态响应曲线。
最大动态速降反映了系统抗扰动能力和系统的稳定性。
由于最大动态速降及扰动量的大小是有关的,因此必须同时注明扰动量的大小。
恢复时间反映了系统的抗扰动能力和快速性。
振荡次数N同样代表系统的稳定性及抗扰动能力图2.2突加负载时的动态响应曲线2.晶闸管电动机直流调速系统存在的问题图2.3 V-M系统的运行范围晶闸管整流器也有它的缺点。
首先,由于晶闸管的单向导电性,它不允许电流反向,给系统的可逆运行造成困难。
由半控整流电路构成的V-M 系统只允许单象限运行(图2.3a),全控整流电路可以实现有源逆变,允许电动机工作在反转制动状态,因而能获得二象限运行(图2.3b)。
《电力拖动自动控制系统》部分习题解答第一章1. 什么叫调速范围、静差率?它们之间有什么关系?怎样才能扩大调速范围? 答:①调速范围——电动机在额定负载下调速时,允许的最高转速max n 与最低转速minn 之比叫做调速范围,用D 表示,即min max n nD =②静差率——当系统在某一转速下运行时,负载由理想空载增加到额定值所对应的转速降落N n ∆与理想空载转速0n 之比,称作静差率S ,即0N n nS ∆=③直流变压调速系统中调速范围、静差率和额定速降之间的关系为)1(s n s n D N N -∆=④采用闭环控制方式,使转速降落N n ∆能够大幅度下降,才能保证在静差率S 不变的前提下扩大调速范围。
2. 某一调速系统,测得的最高转速特性为n 0max =1500 r/min ,带额定负载时的速降N n ∆=15 r/min ,最低速特性为n 0min =100 r/min ,额定速降不变,试问系统能达到的调速范围有多大?系统允许的静差率是多少?解:已知N n ∆=15 r/min ,有n max =n 0max -N n ∆=1500 r/min -15 r/min =1485 r/min n min =n 0min -N n ∆=100 r/min -15 r/min =85 r/min 于是调速范围47.17851585minmax ===n n D静差率%15%10010015%100min0=⨯=⨯∆=n n s N答:系统能达到的调速范围是17.47;允许的静差率是15%。
3. 为什么加负载后直流电动机的转速会降低,它的实质是什么?答:当负载电流增大后,电枢电阻上压降增大,使E 减小,导致转速n 必然下降。
实质是电枢电阻的存在导致压降增大。
4. 某调速系统的调速范围是1500 ~ 150 r/min ,要求静差率为s =2% ,那么系统允许的静态速降是多少?如果开环系统的静态速降是100 r/min ,则闭环系统的开环放大系数应有多大?解:①已知101501500==D ,又)1(s n s n D N N -∆=06.3)02.01(1002.01500)1(N N =-⨯=-=∆s D s n n r/min也可以这样计算n n n n n s NNN ∆+∆=∆=min 0 min r/06.302.0102.01501min N =-⨯=-=∆s s n n ②因为 K1op cl +∆=∆n n所以 68.31106.31001K clop =-=-∆∆=n n答:要求静差率为s =2%时,系统允许的静态速降是3.06r/min ;如果开环系统的静态速降是100 r/min ,则闭环系统的开环放大系数应有31.68。
目录摘要 (2)1主电路的设计 (2)1.1变压器参数的设计与计算 (2)1.2平波电抗器参数的设计与计算 (3)1.3晶闸管元件参数的计算 (4)1.4保护电路的设计 (4)2反馈调速及控制系统 (5)2.1闭环调速控制系统 (5)2.2带电流截止负反馈闭环控制系统 (5)2.3调节器设定 (9)2.4控制及驱动电路设计 (10)3参数计算 (11)3.1基本参数计算 (11)3.2电流截止负反馈环节参数计算与设计 (13)3.3调节器的参数设计与计算 (14)3.4调节器串联校正设计 (17)4总电气图 (18)5心得体会 (20)参考资料 (20)带电流截止负反馈转速单闭环直流调速系统设计摘要直流电动机具有良好的起、制动性能,宜于在大范围内平滑调速,并且直流调速系统在理论和实践上都比较成熟,是研究其它调速系统的基础。
在直流电动机中,带电流截止负反馈直流调速系统应用也最为广泛,其广泛应用于轧钢机、冶金、印刷、金属切割机床等很多领域的自动控制。
本次课设就带电流截止负反馈转速单闭环直流调速系统进行参数的设计。
1主电路的设计1.1变压器参数的设计与计算变压器副边电压采用如下公式进行计算: ⎪⎪⎭⎫ ⎝⎛-+=N sh Td I I CU A nU U U 2min max cos αβVU C I I U A n V U V U Nsh T d 110)105.05.09848.0(9.034.2122205.0105.0109.034.221,220222min max =⨯⨯-⨯⨯+==========则取已知αβ因此变压器的变比近似为:45.311038021===U U K 一次侧和二次侧电流I 1和I 2的计算 I 1=1.05×287×0.861/3.45=75A I 2=0.861×287=247A 变压器容量的计算S 1=m 1U 1I 1=3×380×75=85.5kVA S 2=m 2U 2I 2=3×110×247=81.5kVAS=0.5×(S 1+S 2)=0.5×(85.5+81.5)=83.5kVA因此整流变压器的参数为:变比K=3.45,容量S=83.5kVA1.2平波电抗器参数的设计与计算U d =2.34U 2cos αU d =U N =220V, 取α=0° U 2=V U d 0171.9434.22200cos 34.2==I dmin =(5%-10%)I N ,这里取10% 则 L=0.693mH I U d 2308.375.171.00171.94693.0min 2=⨯⨯=⨯0067.0150010*===N nm n U α1.3晶闸管元件参数的计算晶闸管的额定电压通常选取断态重复峰值电压U DRM和反向重复峰值电压U RRM中较小的标值作为该器件的额定电压。
《电力拖动自动控制系统》部分习题解答第一章1. 什么叫调速范围、静差率它们之间有什么关系怎样才能扩大调速范围 答:①调速范围——电动机在额定负载下调速时,允许的最高转速max n 与最低转速minn 之比叫做调速范围,用D 表示,即minmaxn n D =②静差率——当系统在某一转速下运行时,负载由理想空载增加到额定值所对应的转速降落N n ∆与理想空载转速0n 之比,称作静差率S ,即0Nn n S ∆=③直流变压调速系统中调速范围、静差率和额定速降之间的关系为)1(s n s n D N N -∆=④采用闭环控制方式,使转速降落N n ∆能够大幅度下降,才能保证在静差率S 不变的前提下扩大调速范围。
2. 某一调速系统,测得的最高转速特性为n 0max =1500 r/min ,带额定负载时的速降N n ∆=15 r/min ,最低速特性为n 0min =100 r/min ,额定速降不变,试问系统能达到的调速范围有多大系统允许的静差率是多少解:已知N n ∆=15 r/min ,有n max =n 0max -N n ∆=1500 r/min -15 r/min =1485 r/min n min =n 0min -N n ∆=100 r/min -15 r/min =85 r/min于是调速范围47.17851585 minmax ===n n D静差率%15%10010015%100min0=⨯=⨯∆=n n s N答:系统能达到的调速范围是;允许的静差率是15%。
3. 为什么加负载后直流电动机的转速会降低,它的实质是什么答:当负载电流增大后,电枢电阻上压降增大,使E 减小,导致转速n 必然下降。
实质是电枢电阻的存在导致压降增大。
4. 某调速系统的调速范围是1500 ~ 150 r/min ,要求静差率为s =2% ,那么系统允许的静态速降是多少如果开环系统的静态速降是100 r/min ,则闭环系统的开环放大系数应有多大解:①已知101501500==D ,又)1(s n s n D N N -∆=06.3)02.01(1002.01500)1(N N =-⨯=-=∆s D s n n r/min也可以这样计算n n n n n s NNN ∆+∆=∆=min 0 min r/06.302.0102.01501min N =-⨯=-=∆s s n n ②因为 K1op cl +∆=∆n n所以 68.31106.31001K clop =-=-∆∆=n n答:要求静差率为s =2%时,系统允许的静态速降是min ;如果开环系统的静态速降是100 r/min ,则闭环系统的开环放大系数应有。
学号:中州大学电机及拖动课程设计题目:转速负反馈的单闭环直流调速系统的设计姓名:专业:电气自动化班级:指导老师:赵静2014年6月10号摘要该设计是转速负反馈的单闭环直流调速系统,目前调速系统分为交流调速和直流调速系统,由于直流调速系统的调速范围广、静差率小、稳定性好以及具有良好的动态性能,因此在相当长的时间内,高性能的调速系统几乎都采用直流调速系统,为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统,对调速指标要求不高的场合,采用单闭环系统,按反馈的方式不同可分为转速反馈,电流反馈,电压反馈等。
在单闭环系统中,转速负反馈单闭环使用较多。
在设计中用MATLAB 软件对电流环和转速环的设计举例进行了仿真,通过比较说明了直流调速系统的特性。
关键字:转速负反馈动态性能ABSTRACThe design speed negative feedback is single closed-loop dc speed regulating system, the current speed regulation system is divided into ac speed regulation and dc speed control system, due to the wide scope of speed control of dc speed regulating system, small static rate, good stability and has a good dynamic performance, so in a long time, almost all high performance speed control system using dc speed regulating system, in order to improve the dynamic and static performance of dc speed regulating system, usually adopts closed loop control system, the control of motor speed index requirements is not high, the single closed loop system, according to the feedback in different ways can be divided into the speed feedback, current feedback, voltage feedback, etc.In a single closed-loop system, speed closed-loop used more negative feedback ing MATLAB software in your design, for example, the design of current loop and speed loop are simulated, through comparing the characteristics of thedc speed control systeKEYWORDS:SPEED BACK MATLAB D 目录摘要 (I)Abstract..........................................II I 1转速负反馈单闭环直流调速系的电路.. (1)1.1单闭环直流调速系统原理 (2)1.2调节器的设计 (4)1.3 调节器的计算 (5)2转速控制的要求和调速指标 (6)2.1单闭环调速系统的调速范围以及静差率 (5)2.2反馈控制规律 (6)3转速负反馈单闭环直流调速的特性分析 (11)3.1静态性能分析 (9)3.2动态性能分析 (11)4 电路设计 (12)4 .1 触发电路的选择 (13)5心得体会 (14)6致谢词 (15)7参考文献 (16)1转速负反馈单闭环直流调速系的电路1.1单闭环直流调速系统原理.根据本设计要求,设计的系统为转速负反馈单闭环直流调速系统,其中转速为负反馈量。
2012~2013年(本)1、平波电抗器的大小是如何选择的?答:一般按低速轻载时保证电流连续的条件来选择,通常首先给定最小电流I(以A为单位),再利用它计算所需的总电感(以mH为单位)。
减去电枢电感,即得平波电抗应有的电感值。
2、转速负反馈单闭环有静差调速系统中,电枢电阻、转速反馈系数,这些参数变化时系统是否有调节作用?为什么?答:在电压负反馈单闭环有静差调速系统中,当放大器的放大系数Kp发生变化时系统有调节作用再通过反馈控制作用,因为他们的变化最终会影响到转速,减小它们对稳态转速的影响。
当电动机励磁电流、电枢电阻Ra发生变化时仍然和开环系统一样,因为电枢电阻处于反馈环外。
当供电电网电压发生变化时系统有调节作用。
因为电网电压是系统的给定反馈控制系统完全服从给定。
当电压反馈系数γ发生变化时,它不能得到反馈控制系统的抑制,反而会增大被调量的误差。
反馈控制系统所能抑制的只是被反馈环包围的前向通道上的扰动。
(无调节作用。
因为反馈控制系统所能抑制的只是被反馈包围的前向通道上的扰动。
)3、对于经常正、反运行的调速系统,理想的起动过渡过程应什么样?答:始终保持电流(电磁转矩)为允许的最大值,使调速系统以最大的加(减)速度运行。
当到达稳态转速时,最好使电流立即降下来,使电磁转矩与负载转矩相平衡,从而迅速转入稳态运行。
(起动电流呈矩形波,转速按线性增长)4、什么是软起动器?答:当电压降低时,起动电流将随电压成正比地降低,从而可以避开起动电流冲击的高峰。
起动转矩与电压的平方成正比,起动转矩的减小将比起动电流的降低更多,降压起动时又会出现起动转矩不够的问题。
降压起动只适用于中、大容量电动机空载(或轻载)起动的场合。
5、对于通用变频器,所谓的“通用”有什么含义?答:一是可以和通用的笼型异步电动机配套使用;二是具有多种可供选择的功能,适用于各种不同性质的负载。
6、什么是正弦脉宽调制技术?答:由它们的交点确定逆变器开关器件的通断时刻,从而获得幅值相等、宽度按正弦规律变化的脉冲序列,这种调制方法称作正弦波脉宽调制7、比例积分控制中比例和积分部分各有什么特点?答:比例部分能迅速响应控制作用,积分部分则最终消除稳态偏差。
转速负反馈单闭环直流调速系统的静特性
转速负反馈单闭环调速系统的静特性为一直线,其特性硬度较开环系统机械特性为大。
硬度的大小取决于闭环系统的结构及有关参数的选取。
为了分析方便起见,对系统作如下假定:
(1)忽略系统中各种非线性因素,假定系统为纯线性系统;
(2)假定晶闸管变流器提供的电流是连续的;
(3)忽略电位器的等效内阻。
在以上的假定下 , 转速负反馈系统中各环节的静态(稳态)方程式如下:
电压比较环节 fn gd U U U -=∆
放大器 U K U p c ∆=
晶闸管变流器 c v d U K U =0 晶闸管—电动机系统的开环机械特性φ
C R R I U n n d )(0+-= 测速发电机 n K U fn fn ⋅=
式中 c U ——触发器的移相控制电压
0d U ——晶闸管变流器的空载电压
fn K ——测速发电机的转速反馈系数
消去上式中的中间变量U ∆,c U ,0d U ,fn U ,并经过整理后,即可求得转速负反馈单闭环调速系统的静特性方程为 b b d n gd
v p n n K C I R R K C U K K n ∆-=++-+=0)
1()()1(φφ (1.2) 式中 φ
C K K K K fn v p /=——闭环系统开环放大倍数 由上式可见,闭环系统的静特性方程是斜率为)1()(K C I R R d n ++φ、截距为)
1(K C U K K gd v p +φ的直线方程,当gd U 变化时,截距改变,但斜率恒定。
故改变给定电压gd U 进行调速时,静特性将平行移动。
当断开反馈回路,系统为开环工作状态是,其机械特性方程应为
k k d n gd
v p n n C I R R C U K K n ∆-=+-=0)(φ
φ (1.3) 比较式(1.2)及式(1.3)可看出:
⑴ 在gd U 相同时,开环系统机械特性的理想空载转速0n 为闭环系统静特性的理想空载转速b n 0的(1+K)倍。
这是由于负反馈电压fn U 抵消了大部分给定电压,使加在放大器输入端的电压为fn gd U U U -=∆,这是—个较小的电压,为了保证闭环时电动机工作转速仍能按要求转速基本不变,即使k b n n 00≈,这就需要增大闭环系统给定电压。
然而gd U 是由专门设置的稳压电源提供的,一般都在15V 以下,无法使U 更高。
因此,提高b n 0的任务就落在放大器身上了。
事实上,在gd U 不变的情况下,通过提高P K 值就可以达到提高b n 0的目的。
⑵ 当负载相同时,闭环系统的静态降速b n ∆仅为开环系统静态降速k n ∆的K
+11倍,即闭环系统静特性的硬度大大提高了,这是闭环系统的突出优点。
闭环系统开环放大系数K 越大,b n ∆就越小,则静特性硬度越大。
(注意:K 值的上限受闭环系统稳定性的限制。
为了提高K ,应在系统中引入校正环节)。
⑶ 如果开环系统和闭环系统的电动机的最高转速都是n ,而要求最低静差率相同,那么闭环系统的调速范围可达开环时调速范围的(1+K)倍。
总之,闭环控制可以获得比开环控制硬得多的特性,从而可以保证在限定的静差率要求下,提高调速范围。
值得提出的是:转速负反馈系统不仅能抑制因负载变化对转速带来的影响,而且因闭环系统前向通道中的各种扰动(如:电网电压波动、参数变化…等)对转速的影响均有抑制作用。
这是负反馈闭环系统的基本性能。
共原理在自动控制理论中已有分析,此处不再重复。