臂架变幅式船用起重机技术特点及设计创新
- 格式:pdf
- 大小:729.41 KB
- 文档页数:3

双变幅桅杆起重机设计分析与优化一、引言双变幅桅杆起重机是一种用于起卸货物的重型机械设备。
它通过起重机臂的升降和伸缩,可以完成对各种重量货物的起重。
双变幅桅杆起重机在工程建设、港口装卸等行业中有着广泛的应用,因此其性能和结构设计显得尤为重要。
本文将对双变幅桅杆起重机的设计进行分析和优化,以期提高其工作效率和安全性。
二、双变幅桅杆起重机的结构与工作原理双变幅桅杆起重机主要由基座、起重机臂、变幅机构、起重机架、液压系统、控制系统等组成。
其工作原理是通过液压系统提供动力,使起重机臂伸缩、升降,以及变幅,从而完成货物的起卸。
起重机臂的伸缩和升降是通过液压缸来实现的,而变幅则是通过齿轮传动和液压缸协同完成的。
整个起重机的运行需要由控制系统来进行指挥和监控。
三、双变幅桅杆起重机的设计分析1. 结构设计双变幅桅杆起重机的结构设计要满足其工作条件下的稳定性和承载能力要求。
首先需要保证起重机的基座和起重机架的稳固,以及起重机臂的刚度和强度。
变幅机构也需要设计成稳定可靠的结构,以确保其能够承受起重机臂在各个变幅位置下的工作负荷。
2. 动力系统设计双变幅桅杆起重机的动力系统主要由液压系统和电气控制系统组成。
液压系统需要满足起重机不同工况下的动作要求,包括起重机臂的伸缩、升降和变幅。
液压系统的设计还需要考虑能源利用效率和系统的可靠性。
电气控制系统需要能够对起重机的各项动作进行精确控制,并具有足够的安全保护功能。
3. 性能优化在双变幅桅杆起重机的设计过程中,需要考虑到其工作性能的优化。
包括提高起重机的工作效率和精度,降低起重机的能耗和维护成本等。
为此,需要对起重机的结构和动力系统进行综合分析,并进行优化设计。
四、双变幅桅杆起重机设计的优化方案1. 结构优化在起重机的结构设计中,可以采用优化设计的方法,通过材料的选用和结构的优化,来提高整体的强度和稳定性。
采用高强度材料来制作起重机的部件,优化结构的连接方式和布局,提高整体的受力性能。
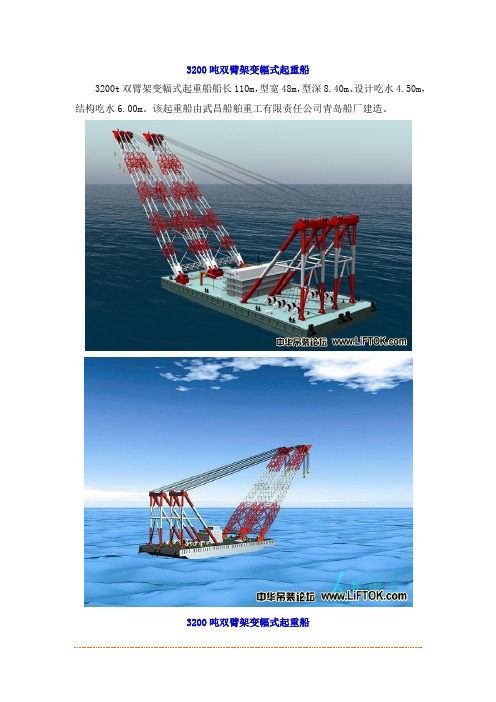
3200吨双臂架变幅式起重船3200t双臂架变幅式起重船船长110m,型宽48m,型深8.40m、设计吃水4.50m,结构吃水6.00m。
该起重船由武昌船舶重工有限责任公司青岛船厂建造。
3200吨双臂架变幅式起重船1.项目概述随着海洋石油开发和大型海上工程建设的发展,海上起重船已成为当代不可缺少的大型工程船舶之一。
近年来,我国海上大型桥梁工程建设渐入佳境,洋山深水港、东海大桥、杭州湾跨海大桥、舟山连岛跨海大桥、上海崇明岛大桥等相继建成,本船的依托工程——港澳珠大桥开建在即,这些大型海上桥梁工程建设中,最重要的装备就是大型海上起重船。
为满足港珠澳大桥以及今后一段时间沿海项目的施工需要,广东省长大公路工程有限公司拟研制一艘3200吨双臂架变幅式起重船,该船主要技术性能指标如下:该船为非自航双臂架变幅式起重机船,采用锚泊定位,单点锚泊抗风10级,八点锚泊作业,抗风6级,浪高2m。
静水航行速度不小于3~4节。
过桥高度不大于水面之上45m。
设计吃水不超过6.0m。
该船入中国船级起重性能:该船单臂架额定起重量为1600t,双臂架额定起重量为3200t,每臂架配量800t主钩2只,150t副钩1只,主钩最大起升高度100m,副钩最大起升高度120m。
起重机采用交流变频电动机驱动控制。
通航要求:过桥高度不大于水面之上48m。
2.主要研究内容(1)精选船舶主尺度,船舶的主尺度是根据船舶的用途和要求,以经济合理的原则进行分析,论证优选的。
影响起重船主尺度的主要技术指标是吊重、吊高、吊距及船舶稳性、耐波性、强度等诸多因素。
(2)严格控制空船重量重心。
特别是控制船体结构和起重机等主要设备的重量。
(3)起重机设计优化。
首先是以减轻重量为目标的结构优化(包括结构尺度、桁架结构及构件截面优化,以及采用新型材料等)。
3.主要技术指标该船为非自航双臂架变幅式起重机船,采用锚泊定位,单点锚泊抗风10级,八点锚泊作业,抗风6级,浪高2m。

臂架式起重机吊重水平移动的优化设计臂架式起重机是一种常见的工业设备,它可以在不稳定的地形上进行起重操作。
通常,这种起重机通常由一组伸缩臂、一个吊钩和一个支架组成,它们能够在水平和垂直方向上进行移动。
然而,许多臂架式起重机在吊重水平移动时存在一些问题,例如摇摆、不平衡等。
因此,在本文中,我们将介绍如何优化臂架式起重机的吊重水平移动设计,以提高其稳定性和安全性。
首先,我们将探讨臂架式起重机的基本结构和工作原理。
通常,起重机的支架可以进行360度旋转,并配有液压吊杆和液压缸。
伸缩臂可以伸出5-30米,可以根据所需的高度进行调整。
借助支架和液压系统的辅助,起重机可以进行重量高达数吨的吊装工作。
然而,在移动过程中,臂架式起重机往往会出现摇摆,容易导致货物倾斜或不稳定地移动。
为了解决这个问题,我们可以采取一系列措施来优化臂架式起重机的吊重水平移动设计。
第一,我们可以使用软启动技术来控制起重机的水平运动。
这种技术可以缓慢地将起重机加速到运动速度,以避免起重机突然加速或停止,并在移动过程中减小摇晃和颠簸的可能性。
第二,我们可以加强起重机的平衡性和稳定性。
为了确保起重机在吊重度假正常,其支点和吊挂点应该在同一平面上,这可以通过使用高质量的弹簧和牵引器件来实现。
另外,控制吊钩上下移动的速度也很重要,应该采用精确控制技术,以防止起重机在移动过程中出现颠簸或晃动。
第三,我们可以对起重机进行定期维护和保养。
安全绳索、吊钩、液压缸和其他关键部件都应经常检查,以确保它们保持良好的工作状态。
在操作起重机之前,应先进行基础检查,避免因疏忽而发生事故。
总之,臂架式起重机是一种广泛使用的工业设备,对于许多行业来说都是不可或缺的。
然而,在吊重水平移动时,它们也往往存在一些问题。
我们可以采取软启动技术、加强平衡性和稳定性,以及定期维护和保养的方法来优化起重机的吊重水平移动设计,提高其稳定性和安全性。

大型起重船的关键技术与创新研究进展大型起重船是一种专门用于进行大型物体吊装和运输的船舶,广泛应用于海洋工程、港口建设、海上风电等领域。
随着技术的不断发展和需求的增加,大型起重船的关键技术和创新研究也在不断推进。
本文将围绕大型起重船的关键技术和创新研究进展展开阐述。
1. 起重能力提升技术大型起重船的主要任务是进行吊装作业,因此起重能力是评价其性能的重要指标。
为了提升起重能力,研究人员在大型起重船设计中采用了一系列创新技术。
首先,采用高强度钢材和先进的焊接技术,提升起重船结构的强度和刚度。
其次,采用多点支撑技术,增加起重船的稳定性和抗倾覆能力。
此外,利用计算机仿真技术、智能控制系统等手段,实现起重过程的精确控制和协调,提高起重效率和安全性。
2. 远程操作与自动化技术随着无人化技术的发展,远程操作与自动化技术逐渐应用于大型起重船。
通过远程操控系统,操作员可以在船舶上远程监控和操控吊臂,实现远程作业。
同时,引入自动化技术,可以提高作业效率和安全性,减少人为错误。
例如,采用自动定位系统和传感器技术,起重船可以自动控制位置和姿态,实现自动对准目标物体。
另外,还可以利用卫星导航系统,实现全球定位和导航,提高航行和作业的准确性。
3. 高海态性能技术大型起重船常常需要在恶劣的海洋环境中进行作业,因此高海态性能是其设计中需要解决的关键问题之一。
为了提高起重船在海上的稳定性和抗风浪性能,研究人员通过多学科交叉研究,提出了一系列创新技术。
例如,采用动力定位技术,使起重船能够稳定停留在预定位置,不受风浪的影响。
此外,通过改进船体结构和船舶姿态控制系统,提高起重船的防倾覆和抗浪性能。
另外,研究人员还利用数值模拟方法,研究起重船在不同海况下的工作状态,优化设计方案,提高海上作业效率。
4. 省能减排技术随着全球环保意识的增强,大型起重船的省能减排技术也得到了广泛关注。
传统的大型起重船通常使用柴油发动机作为主要动力源,这种动力系统存在能源浪费和环境污染的问题。

双变幅桅杆起重机设计分析与优化一、双变幅桅杆起重机的工作原理双变幅桅杆起重机是一种通过在斜拉杆上设置滚动轭和伸缩式的吊装系统,来实现高效起重作业的起重机。
它的工作原理主要是通过伸缩式吊装系统的伸缩机构,使得起重臂在工作时可以根据工况要求伸缩变幅,并且在整个变幅范围内都能保持较好的平衡性和稳定性。
通过斜拉杆的设置,可以提供起重机的稳定性和安全性。
二、双变幅桅杆起重机的设计分析1. 结构设计分析双变幅桅杆起重机主要由主梁、斜杆、伸缩臂、滚轭、主卷扬机等部分组成。
主梁和斜杆是起重机主体的支撑结构,伸缩臂和滚轭则是起重机变幅和吊装工作的关键部件。
在设计过程中,需要充分考虑这些部件的结构强度、稳定性、安全性等方面的要求,以确保起重机在工作时能够稳定、安全地完成各种起重作业。
2. 传动系统设计分析双变幅桅杆起重机的伸缩臂和滚轭的伸缩机构是通过传动系统来实现的。
传动系统的设计需要考虑到起重机的变幅要求和控制要求,选择合适的传动方式和传动结构,以确保伸缩臂和滚轭能够在工作时实现快速、稳定的伸缩变幅,并且能够满足起重作业的要求。
3. 控制系统设计分析双变幅桅杆起重机的控制系统是起重机操作和变幅控制的关键部分。
控制系统设计需要充分考虑起重机的工作环境和工作要求,选择合适的控制方式和控制元件,以实现起重机的精确操作和变幅控制,确保起重作业的安全性和高效性。
三、双变幅桅杆起重机的优化方案1. 结构优化方案通过采用轻量化材料和优化结构设计,减小起重机自重,提高机械强度和稳定性,从而提高起重机的工作效率和使用寿命。
2. 传动系统优化方案采用先进的传动方式和传动结构,提高传动系统的传动效率和可靠性,减小传动系统的能量损耗,实现起重机的快速、稳定的变幅操作。
3. 控制系统优化方案采用先进的控制方式和控制元件,实现起重机的精确控制和智能化操作,提高起重机的工作精度和安全性,减小人为误操作对起重机的影响。
四、结语通过对双变幅桅杆起重机的设计分析和优化方案的研究,可以进一步提高起重机的性能和效率,满足不同工程项目的起重要求,为工程建设提供更好的技术支持和服务保障。
一种动臂可伸缩式的桅杆起重机的创新设计高志华【摘要】具有动臂的桅杆起重机是一类常用的起重设备,其主要构件制作较简单,安装和拆除方便,起吊重量大,在使用中对安置的地点要求不高,场地适应能力强,因此在起重作业中得到广泛应用.然而这类起重机由于其动臂长度固定,变幅范围小,在水平幅度与举升高度均受到限制,作业适应能力差,仅能用于近距离大载荷吊装作业.本文创新设计了一种动臂可伸缩式的桅杆起重机,结构轻巧、作业灵活,除具有重载起吊能力外,既扩大了水平作业幅度,同时还具有高空举升能力,克服了常规桅杆起重机的起吊半径小、作业适应能力差的问题,适合于起吊、搬运、高空作业、应急救援等作业需求.【期刊名称】《湖北农机化》【年(卷),期】2018(000)011【总页数】1页(P55)【关键词】动臂可伸缩;桅杆起重机【作者】高志华【作者单位】随州职业技术学院【正文语种】中文0 引言具有动臂的桅杆起重机由桅杆、动臂、卷扬机等组成,其结构简单,是一类常用的起重设备。
其主要构件制作较简单,安装和拆除方便,起吊重量大,在使用中对安置的地点要求不高,场地适应能力强,因此在起重作业中得到广泛应用。
1 传统桅杆起重机存在的问题传统桅杆起重机,虽然结构简单,使用条件要求不高,但是缺点突出。
由于其动臂长度固定,变幅范围小,在水平幅度与举升高度均受到限制,作业适应能力差,仅能用于近距离大载荷吊装作业。
在现场作业时,通常有重载起吊、大幅度水平输送、举高等多种作业需求,如在应急救援中,面临危险物品快速吊离、灭火剂举高喷射、人员空中输送等要求,往往需要调用不同设备完成。
因此,解决桅杆式起重机作业范围小、灵活性差的问题,对扩大现有起重机应用范围及能力具有重要的意义。
2 动臂可伸缩式的桅杆起重机设计面对以上问题,本文设计了一种具备重载荷起吊、大半径作业和高空举升作业功能的起重机。
图1 单组缆绳动臂可伸缩式桅杆起重机1.桅杆;2.伸缩动臂;3.缆绳;4.缆绳张紧装置;5.油缸本文设计的动臂可伸缩式桅杆起重机由桅杆、伸缩动臂、缆绳及其张紧装置等组成。
技术创新50 2015年15期1000吨单臂架变幅式起重船起重机总体设计李畅哲武桥重工集团股份有限公司,湖北武汉 430056摘要:介绍1000吨单臂架变幅式起重船起重机的主要构造及参数,通过对起重机的总体、结构及机构进行优化设计,同时满足起重船起重机海上及内陆河的施工要求,完成海上打捞、海上石油和海上风电工程安装设备特殊工况的吊装工作。
关键词:通航;总体设计;结构设计;机构设计中图分类号:U674.35 文献标识码:A 文章编号:1671-5780(2015)15-0050-021 概述世界陆上常规能源正在面临着耗尽的危机,各国都开始大力开发海上石油和海上风电,而海上风电是当前最具规模开发和商业发展前景的低碳新能源之一,随着世界海上风电技术日趋成熟,海上风电在中国有着巨大的发展空间。
臂架式起重船因其起重能力强、起升高度高、起吊幅度大,造价便宜,已成为海上打捞、海上石油和海上风电工程安装设备的主力军。
2 起重机主要构造及技术参数1000吨单臂架变幅式起重机,主臂架配置500t主钩2只, 300t副钩 1只,主钩起升高度70m,副钩起升高度88m。
另外配置一个起升能力为150吨备用臂架,备用臂架吊钩起升高度120m。
主臂架臂头和备用臂架之间采用可拆卸式连接,起重机正常作业、拖航、过桥不安装备用臂架,当主臂副钩起升高度不满足作业高度要求时安装备用臂架。
主臂架300吨副钩和备用臂架150吨吊钩共用同一套起升机构。
整机配置一组双联变幅卷扬机、二组双联主钩卷扬机、一组双联副钩卷扬机、二台索具钩卷扬机和二台稳索绞车;起重和变幅均采用交流变频电动机驱动,并具有同步调平控制。
起重机主要由主臂架、备用臂架、吊臂铰座、人字架、主钩起升机构、副钩起升机构、索具钩起升机构、变幅机构、稳索绞车、电气系统及安全装置组成。
起重机按吊臂仰角为65°设计吊高、额定起重量、舷外幅度等参数:主钩技术参数:额定起重量: 2×500t船舷外工作幅度: 32.87m起升高度:主钩水面以上70m300吨副钩技术参数:额定起重量: 300t船舷外工作幅度: 38m起升高度:副钩水面以上88m150吨副钩技术参数:额定起重量: 150t船舷外工作幅度: 51.2m起升高度:吊钩水面以上120m3 起重机的设计条件(1)航区起重机适应港口或遮蔽水域环境条件或相当上述环境条件时的近海区域起重作业,近海航区拖航调遣。
臂架式起重机吊重水平移动的优化设计臂架式起重机作为一种常见的起重设备,在工业生产和施工现场都有广泛的应用。
与传统的塔吊相比,臂架式起重机具有灵活方便、占地面积小等优势。
然而,在实际使用中,臂架式起重机的吊重水平移动存在一些问题,需要进行优化设计。
一、问题分析臂架式起重机的吊重水平移动主要依靠臂架的伸缩和平移机构。
然而,在实际使用中,这一机构往往存在一些不足之处:1、伸缩机构设计不合理。
部分臂架式起重机伸缩机构的设计过于简单,无法经受长期的高负荷使用,导致机构失灵。
2、平移机构不够灵活。
目前市场上的部分臂架式起重机平移机构结构较为简单,只能实现直线运动,无法满足复杂工况下的需求。
3、操纵系统响应速度慢。
部分臂架式起重机操纵系统响应速度慢,影响了吊重效率和安全性。
二、优化设计方案针对以上问题,可以采用以下优化设计方案:1、伸缩机构升级。
将现有的伸缩机构升级换代,采用高强度材料和先进的运动控制技术,确保机构在高负荷条件下的可靠性和耐用性。
2、平移机构改进。
采用多轴平移机构,结合传感器和控制器实现机构在平面内的任意位置和方向移动,提高起重机的灵活性和适用性。
3、操纵系统升级。
采用高速响应的液压或电气系统,实现操纵手柄操作时系统的即时响应,提高吊重效率和安全性。
三、应用效果经过优化设计后的臂架式起重机具有以下优点:1、吊重水平移动更加灵活。
采用多轴平移机构,可以实现机构在平面内的任意位置和方向移动,适用于复杂工况下的需求。
2、机构运动更加稳定。
采用高强度材料和先进的运动控制技术,确保机构在高负荷条件下的可靠性和耐用性,降低了机构失灵的风险。
3、操纵系统更加响应迅速。
采用高速响应的液压或电气系统,实现操纵手柄操作时系统的即时响应,提高吊重效率和安全性,减少了操纵误操作的可能性。
四、总结臂架式起重机的吊重水平移动优化设计,需要考虑几个方面的问题。
在设计伸缩和平移机构时,要采用高强度材料和先进的运动控制技术,确保机构在高负荷条件下的可靠性和耐用性;在设计操纵系统时,要采用高速响应的液压或电气系统,实现操纵手柄操作时系统的即时响应。