基于虚拟样机技术的防爆电缆卷筒产品开发
- 格式:pdf
- 大小:522.30 KB
- 文档页数:9

500m口径球面射电望远镜柔性馈源支撑系统仿真李辉;孙京海;朱文白;潘高峰【摘要】为给500m口径球面射电望远镜(Five-hundred-meter Aperture Spherical radio Telescope,FAST)提供设计优化方案,对其柔性馈源支撑系统进行1:1原型虚拟样机的全程仿真.设计整个仿真模型的控制框架和控制算法;分析系统的运动学、动力学和在干扰载荷下的控制精度.整个仿真工作主要分为对舱-索悬挂系统的动力学分析和系统其他机构、单元的控制仿真分析,前者通过有限元法实现,后者通过多体系统动力学方法和机电控制实现.通过对馈源定位的控制精度评估,可更好地为天文观测提供设计优化方案,降低硬件设计和实验的盲目性与成本,加快研究进程.【期刊名称】《计算机辅助工程》【年(卷),期】2011(020)001【总页数】7页(P106-112)【关键词】500m口径球面射电望远镜;柔性馈源支撑系统;虚拟样机;运动学;动力学【作者】李辉;孙京海;朱文白;潘高峰【作者单位】中国科学院国家天文台,北京,100012;中国科学院国家天文台,北京,100012;中国科学院国家天文台,北京,100012;中国科学院国家天文台,北京,100012【正文语种】中文【中图分类】TN16;TB115.20 引言500 m口径球面射电望远镜(Five-hundredmeter Aperture Spherical radio Telescope,FAST)是“十一五”期间国家重大科学装置工程之一,也是支撑天文学基础前沿研究和多学科交叉前沿研究的一个重要公共平台.其反射面由总数约为4 600片、边长达11 m的三角形单元组成,在中性状态为曲率半径达300 m的巨大球冠,不能像传统的地面全可动望远镜那样通过整体转动来对准观测天体.在观测状态下,FAST的部分反射面单元可主动变形为一个口径约300 m的瞬时旋转抛物面,聚焦来自太空天体的射电波信号,使处于焦点位置的望远镜观测设备——馈源接收机能接收并进行处理.由于地球的自转,射电波的入射角度会随着天体东升西落而发生变化,瞬时旋转抛物面会在反射面球冠上移动,导致焦点位置也随之连续改变.[1-2]在观测状态下,FAST要求馈源接收机按照预定的轨迹实时跟踪焦点的位置变化,并且应该具有高精度的位置和指向要求,在换算成位置误差的均方根值后应不大于10 mm.[3]FAST所特有的柔性馈源支撑是由多级机构组成的、刚柔结合的并联机器人系统,可保障馈源舱内的馈源接收机实时跟踪反射面焦点在轨迹焦面内的运动,并实现对观测天体的高精度指向和定位[4-6],见图1.其中,一级粗调定位机构由6根并联的柔性支撑钢索及其对应的支撑塔和卷索伺服机构(卷扬机)组成,通过协调控制6根钢索的收放,可驱动馈源舱沿预定轨迹运动.二级精调机构位于馈源舱内,由舱上平台、x-y转轴机构(万向节)、Stewart并联机构和馈源接收机平台等组成.同时,FAST采用大范围、高精度、高采样率的测量与相应控制技术,完成望远镜的反射面主动变形和精确的指向跟踪.图1 FAST及其柔性馈源支撑系统示意Fig.1 FAST and its flexible feed support system由于FAST尺寸巨大,无法进行1∶1的原型试验,基于虚拟样机技术的全程数值仿真是可行的方法之一.在国外,全程数值仿真技术已得到广泛运用并成为不可或缺的望远镜工程分析和设计手段之一.本文通过建立FAST柔性馈源支撑系统的虚拟样机,尽可能模拟该系统从输入操作人员指定的观测轨迹开始,到馈源接收机终端的定位精度输出为止的全部工作运转过程,研究分析其中的力学和控制问题,并评估馈源定位的控制精度,更好地为天文观测提供设计优化方案,降低硬件设计和实验的盲目性,节省有限的人力、物力和财力,加快研究的进程.1 柔性馈源支撑的全程仿真模型总成FAST馈源支撑系统的控制系统构成及全程仿真模型框图见图2.图2 FAST馈源支撑系统的控制系统构成及全程仿真模型框图Fig.2 Control system of FAST feed support system and block diagram of end-to-end simulation modelFAST 柔性馈源支撑的控制体系可划分为一级柔性索支撑控制子系统和二级精调控制子系统.前者通过驱动卷扬机牵引支撑索完成馈源舱对预定观测轨迹和反射面焦点的初步动态跟踪,其定位精度能达到厘米级;而后者的任务是将馈源接收机平台调整至所要求的指向,并补偿前者的残余定位误差.必要时,还可在馈源舱内增加基于主动控制的阻尼器以提高舱索系统的阻尼,从而形成振动控制子系统.图2中系统主控制器既是一级索支撑控制器,同时又负责与其他各子系统之间的协调控制.主控制器接收馈源舱的位置、姿态反馈信息和索张力反馈信息,并输入预先规划好的天文观测轨迹曲线,根据望远镜的运行工况和控制算法确定各子系统的工作状态和调控量,并将控制指令发送到下一级的子系统控制器.2 全程仿真模型构建2.1 舱-索悬挂系统的动力学建模与分析在FAST柔性馈源支撑中,馈源舱、6条支撑钢索、塔顶滑轮和塔底卷扬机绞盘组成舱-索悬挂系统,并决定馈源支撑的动力学性能.在舱-索悬挂系统中,6根支撑索是最具柔性、可控性难度最大的部分,而其他部分均可简化为刚体.馈源舱的移动会导致支撑索的索长和索张力改变,从而使得舱-索悬挂系统的振动模态也处于不断变化中,整个系统表现出一定的时变性和几何非线性特征.考虑到馈源舱的振幅远小于支撑悬索的跨度和高度,对于舱-索系统的动力学分析可在其静力平衡位置附近进行线性简化.由于在观测时舱的运动速度很低,最大不超过12 mm/s,对于FAST舱-索悬挂系统的分析可进一步采用瞬时结构假定法[7].在该假定下可认为系统的质量、刚度和阻尼仅与馈源舱的位置有关,而与舱体和支撑索的运动速度无关.基于这2种简化方式,通过有限元模态分析可知定点位置的舱-索悬挂系统的振动特性.在进行仿真分析时,为得到从电机扭矩输入到馈源舱的位置输出之间的系统传递特性,可假定6个塔底卷扬机绞盘不自锁.馈源舱在馈源焦面最低点时舱索系统的前20个固有频率见表1,可知这些固有频率明显分为3类:前3个振动模态固有频率为0,对应于系统的刚体模态,这是由塔底卷扬机绞盘不自锁所引起的,表明卷扬机可驱动馈源舱进行大范围移动;后17个振动模态为系统的弹性振动,频率普遍较低,频率最小值在0.18 Hz左右,接近于具有相同跨度和高度的单索振动固有频率,表明FAST舱-索悬挂系统的动力学性能主要取决于6根支撑悬索.其中,系统前13个振动模态之间相邻频率值相差不大,且在其相应振型中索振形态大致为半个波长的驻波,可划分为第1类振动模态;后4个振动模态的相应振型中索振形态大致为一个波长的驻波,可划分为第2类弹性振动模态.依次类推可划分系统的无穷个高阶振动模态.表1 馈源舱在馈源焦面最低点时舱-索悬挂系统的前20个固有频率Tab.1 The first 20 natural frequencics of cabin-cable system with the feed cabin at the lowest point of the feed focus surface阶数序号固有频率/Hz 1 0 0 2 0 30 4 0.179 739 498 739 7 5 0.182 013 441 891 6 6 0.182 454 846 154 0 7 0.196 852 383 332 5 8 0.196 988 229 485 6 9 0.208 850 982423 7 1 100.212 708 371 968 3 11 0.212 721 889 948 8 12 0.212 735 444 508 9 13 0.215 157 755 319 5 14 0.215 177 298 199 0 15 0.216 624 424 635 2 16 0.275 987 328 854 7 17 0.348 923 357 289 5 18 0.349 020 913 740 9 2 19 0.424 686 722 288 4 20 0.424 714 830 191 2图3为当馈源舱处于馈源焦面最低点时的舱-索悬挂系统频响传递函数.图3 当馈源舱处于馈源焦面最低点时舱-索悬挂系统频响传递函数Fig.3 Frequency-response transfer function of the cabincable system with the feed cabin at the lowest point of the feed focus surface该函数以其中1个支撑塔所属卷扬机绞盘扭矩为单位输入,以3个馈源舱位置响应为输出的力学传递函数关系.传递函数可清楚地展示刚体模态、第1类弹性振动模态(约0.2 Hz)、第2类弹性振动模态(约0.3~0.5 Hz)和其他高阶振动模态对舱-索悬挂系统输入、输出传递函数的贡献.2.2 卷扬机仿真模型卷扬机机构包括驱动电机转子、减速箱、离合器和钢索绞盘等.在仿真模型中,减速箱可简化为具有一定扭转弹簧刚度的惯性质量,其他均按具有一定惯性质量的刚体处理.为更好地模拟卷扬机性能,仿真中引入反映减速箱齿轮间隙的回程效应和各接触机构之间摩擦效应的模型,见图4.图4(a)中,iG为减速比;所有T均为扭矩;S为索张力;φ为转角;ω为角速度;J为惯性矩;CM为模拟电机转轴的扭转弹簧刚度系数;KM为模拟电机在单位电流下输出的扭矩.在回程效应模型中,其齿轮间隙取值小于输入轴齿轮的一个齿宽;在摩擦效应模型中,其黏聚摩擦力扭矩设为小于最大电机扭矩的10%,滑移摩擦力扭矩设为小于最大电机扭矩的5%.图4 卷扬机仿真模型Fig.4 Simulation model of capstan2.3 舱内机构仿真模型x-y转轴机构由2个可分别绕相互正交水平轴旋转的承重圆环框架和相应驱动机构组成,承重圆环框架按刚体简化,其x环轴与舱上平台固结,y环轴与x环轴相连接,见图5(a).假设旋转前内环轴的初始单位方向矢量为P={0, 0,-1}T,外环框架绕外环轴旋转角度α,内环框架绕内环轴旋转角度β,由x-y转轴机构的运动学容易推导旋转后内环轴的单位方向矢量为图5 x-y转轴机构和6杆并联Stewart驱动器Fig.5 x-y shaft mechanisms and Stewart actuator with six poles6杆并联Stewart驱动器分别与上部的x-y转轴机构内环(基平台)和下部的馈源接收机平台(稳定平台)连接构成6杆并联机器人,用于馈源支撑系统的最后精调定位,具有很高的刚度和控制精度.其中,每个驱动器顶端与基平台通过胡克铰(universal joint)连接,底端与稳定平台通过球铰(spherical joint)连接,见图 5(b).设坐标系OA-xAyAzA和OB-xByBzB分别固连于基平台和稳定平台,胡克铰相对于基平台的坐标可用矢量OAUi表示,球铰相对于稳定平台的坐标可用矢量OBSi表示.假设稳定平台的指向可用3×3旋转矩阵R表示,则对于一个给定上、下平台中心位置(OAOB)和相对于基平台的稳定平台指向R,Stewart驱动器矢量可表示为当驱动器长度变化时,稳定平台位姿相对于基平台在六自由度方向变化,并且可控.2.4 控制器设计控制器的设计包括主控制器的设计和二级精调控制器的设计.主控制器主要包含2个功能:首先需要计算由预定观测轨迹和索张力优化所确定的馈源舱参考位姿与测量系统反馈回的馈源舱实际位姿之间的误差,并通过传统的比例/积分/微分(PID)控制算法计算馈源舱的位姿调整量,然后通过基于舱-索悬挂系统的静力平衡和索张力优化分析将调整量分配到6台卷扬机,并转换为各个绞盘的转角量,使其协同工作;其次,主控制器需随馈源舱位姿的变化不断调整6条悬索的静态索张力并将其换算为绞盘和电机上的静态扭矩,实时传送给卷扬机模型,否则卷扬机模型会因动态扭矩过高/低导致控制不稳.馈源舱内x-y转轴机构和Stewart 6杆并联机构驱动器均采用伺服电机加滚珠丝杆驱动,驱动器共有8个,可共用一块PMAC卡进行控制.图6为全程仿真模型中的二级精调控制器框图.图6 全程仿真模型中的二级精调控制器框图Fig.6 Block diagram of the secondary fine tuning controller in end-to-end model由图6可知,二级精调控制回路主要由基于电流控制的内环和基于转角控制的外环组成.外环仍然采用PID算法,其实际反馈的位姿数据由激光全站仪测量的舱上平台数据通过式(1)或(3)中的运动学解算得到,然后与参考的位姿数据进行比较.位姿误差经过PID算法处理后进入内环,驱动电机运转.2.5 风载荷仿真模型对FAST柔性馈源支撑系统而言,风是最主要的干扰载荷.根据目前在望远镜洼地现场有限测点测得的数据,在离地面10 m高度的平均风速按正常工作情况可取10=4 m/s,按最大极限情况平均风速可取 10=8 m/s.为模拟脉动风速的变化,在全程仿真中采用Davenport风谱假设.[8]对于任一高度z处的平均风速,式中:α=0.16,为地形影响因数.对于脉动风速,其功率谱分布函数式中:Lv和κ=0.01分别代表尺度因子和地面粗糙度的影响;f为脉动风的频率.由于式(5)的函数较为复杂,在全程仿真时可采用多项式进行曲线拟合近似,其中的脉动风谱可通过一定的随机噪声生成算法转换为时域的风速时程曲线.将平均风速和脉动风速进行叠加,采用伯努利原理将其转化为动态风压分布,得再根据馈源舱(简化为球形)和支撑悬索(简化为圆柱体)的受风面积计算动态风载荷,并施加到舱和索上.3 全程仿真模型运行结果分析全程仿真模型的运行结果依赖于建模时的基本参数,见表2和3.在望远镜运行时,馈源舱实际上在整个焦面内移动.为使舱-索悬挂系统的动力学模型能得到有效简化,在全程仿真中只选择数个位置点及附近的轨迹进行仿真模拟,假定在此范围内关于舱-索悬挂系统可用线性时不变模型代替.其典型位置点可选取焦面中心点、焦面边缘且离一塔最近位置点和焦面边缘且在相邻两塔中间位置点,分别代表索张力分配最均匀和最极端的情况.仿真结果表明,馈源接收机平台的位姿误差均方根值均小于技术指标所规定的10 mm,达到设计要求,见表4.表2 全程仿真中所采用的一次索支撑模型参数Tab.2 Model parameters of the primary cabin suspension in end-to-end simulation名称取值范围支撑塔分布圆半径/m 300馈源焦面曲率半径名称取值范围馈源舱自重约30 t支撑索单位自重约/m 160馈源焦面口径68 N/m支撑索弹性模量约150 GPa/m 206支撑塔高度(距反射面开口)/m 150支撑索公称直径约50 mm馈源舱直径(舱索铰接点分布圆) 约10 m馈源舱重心相对于铰接点平面位置下方,约246 mm支撑索长度/m 140~420卷扬机绞盘直径/m 2舱-索悬挂系统阻尼比/%0.22支撑塔1阶固有频率约1 Hz表3 全程仿真中所采用的舱内机构模型参数Tab.3 Model parameters of the cabin mechanisms in endto-end simulation名称取值范围名称取值范围舱上平台(含x-y转轴机构基座及舱罩)重量约16 t 外环框架直径约8 m x-y机构内、外环框架自重约4 t 内环框架直径约6 m驱动器(8个)重量约1.5 t 内环至接收机平台净高约2 m馈源接收机平台重量约3 t 馈源接收机平台直径约4 m上平台附属设备约5.5 t 上平台至下平台净高约5 m表4 全程仿真得到的位姿误差均方根值统计Tab.4 Position and attitude errorsin root mean square value by end-to-end simulation馈源舱位置舱内机构舱上平台接收机平台(稳定平台)空间定位误差/mm 指向误差/rad 空间定位误差/mm 指向误差/rad焦面中心8.314 4.008 7.100E-4馈源焦面边缘且离一塔最近13.020 6.424 6.200E-4馈源焦面边缘且在相邻两塔中间11.693 6.900 8.901E-4图7为在焦面中心点位置时,通过全程仿真得到的馈源接收机平台定位误差控制曲线.图7 焦面中心点位置馈源接收机平台的定位控制误差Fig.7 Control errors of the cabin receiver platform at the center of focus surface由图7可知,在一次索支撑控制下,舱上平台的位置误差均方根值为8.314 mm,经过二级精调控制后,稳定平台的定位精度进一步提高至均方根值误差只有4.008 mm.此外,二级精调能有效补偿低于0.18 Hz的准静态位置误差,但对于基于舱-索悬挂系统主频率0.18 Hz的位置误差却基本没有补偿作用.该问题涉及处于悬挂的二级精调定位系统的控制稳定性问题,需进一步深入研究.4 结束语对FAST柔性馈源支撑系统的工作性能进行1∶1的全程仿真研究,建立初步的全程仿真模型,仿真结果表明馈源接收机平台的位姿误差能达到技术指标要求.鉴于系统的复杂性,对其中的舱-索悬挂系统动力学进行近似简化建模分析.此外,仿真模型中的振动控制系统在目前的仿真中并未加入,该项工作需在未来的研究中进一步发展、完善.全程仿真工作的结果依赖于各个机构模型参数的取值,目前仍处于不断的设计优化中.全程仿真结果有助于为设计优化提供评估依据,二者可以互动,推动各项研究工作的深入开展.参考文献:【相关文献】[1]NAN Rendong.Five-hundred-meter aperture spherical radio telescope(FAST)[J].Sci China:Ser G:Phys Mech & Astron,2006,49(2):129-148.[2]QIU Y H.A novel design for a giant Arecibo-type spherical radio telescope with an active main reflector[J].Mon Not R Astron Soc,1998,301(3):827-830.[3]NAN Rendong,REN Gexue,ZHU Wenbai,et al.Adaptive cable-mesh reflector for the FAST[J].Acta Astronomica Sinica,2003,44(S1):13-18.[4]DUAN B Y,QIU Y Y,ZHANG F S,et al.On design and experiment of the feed cable-suspended structure for super antenna[J].Mechatronics,2009,19(4):503-509. [5]REN Gexue,LU Qiuhai,ZHOU Zhou.On the cable car feed support configuration for FAST[J].Astrophys & Space Sci,2001,278(1-2):243-247.[6]ZHU Wenbai,NAN Rendong,REN Gexue.Modeling of a feed support system for FAST[J].Exp Astron,2004,17(1-3):177-184.[7]孙欣.大射电望远镜悬索式馈源支撑系统的非线性静力学、运动学和动力学理论及方法的研究[D].西安:西安电子科技大学,2001.[8]DAVENPORT A G.The generalization and simplification of wind loads and implications for computational methods[J].J Wind Eng & Ind Aerodynamics,1993,46-47(1):409-417.。

第30卷第2期2009年 2月煤 矿 机 械CoalM ine MachineryVol .30No .2Feb .20093中国矿业大学青年科研基金项目(OH060106、OH060103)、中国矿业大学大学生科研训练计划(070610)涡旋压缩机虚拟样机运动仿真的研究3胡跃华1,范海明2,李海生1,陈英华1,李 迎1(1.中国矿业大学化工学院,江苏徐州221008;2.中国石油第二建设公司,兰州730060) 摘 要:利用Pr o /Engineer 进行零部件的三维建模,根据涡旋压缩机的结构特点,构建虚拟样机模型,利用Pr o /E 的机构分析模块Pr o /Mechanis m 实现运动仿真,并分析了仿真结果的合理性。
结果表明:所设计的虚拟样机的运动过程与物理样机一致,应用虚拟设计的方法对涡旋压缩机进行设计,极大地提高了设计效率和精度,缩短了新产品的研发周期。
关键词:涡旋压缩机;Pr o /Engineer;运动仿真中图分类号:T H45 文献标志码:A 文章编号:1003-0794(2009)02-0054-03M oti on Si m ul ati on for Vi rtual Prototype Machi n e ofScroll Co mpressorHU Y ue -hua 1,FAN Ha i -m i n g 2,L I Ha i -sheng 1,CHEN Y i n g -hua 1,L IY i n g1(1.College of Chem ical Engineering Technol ogy,China University of M ining and Technol ogy,Xuzhou 221008China;2.The Second Construti on Company of CNPC,Lanzhou 730060,China )Abstract:U se Pr o /Engineer t o design three -di m ensi onal models of the parts,establish virtual p r ot otype model based on the characteristic of the scr oll comp ress or structure,carry out moti on si m ulati on for it u 2sing the Pr o /Mechanis m module of Pr o /E,and analyze the results of the si m ulati on .A s the results shows :the moti on p r ocess of the virtual p r ot otype is consistent with the physical machine .This virtual design scr oll comp ress or method,greatly i m p r ove the design efficiency and p recisi on,and shorten the re 2search cycle of the ne w p r oducts .Key words:scr oll comp ress or;Pr o /Engineer;moti on si m ulati on0 引言Pr o /E NGI N EER 软件系统提供了机构运动仿真功能,可以帮助用户更好地完成机构设计,使原来在二维图纸上难于表达和设计的运动易于修改,并且能够大大简化机构的设计开发过程,缩短其开发周期,减少开发费用,同时提高产品质量。

大型矿用挖掘机电缆卷简装置改进作者:许玉明,王晓明,张永明来源:《科技创新与生产力》 2014年第9期许玉明,王晓明,张永明(太原重工股份有限公司,山西太原 030024)摘要:通过对大型矿用挖掘机电缆卷筒的使用情况以及在现场出现的问题进行汇总,分析研究矿用挖掘机电缆卷筒,寻求合理的改进方案,实现电缆卷筒装置合理地收放外部电缆,保证挖掘机的使用要求。
关键词:挖掘机;电缆卷筒;排缆机构中图分类号:TD42 文献标志码:A DOI:10.3969/j.issn.1674-9146.2014.09.057随着大型露天矿山的不断开采,大型矿用挖掘机的需求量也逐渐增多,同时用户对挖掘机的性能及人机安全性都提出了更高的要求,以前用户为了降低采购成本,不采用电缆卷筒装置,而是自行设计制作一个爬犁,挖掘机在现场作业时,将外部电缆托在爬犁上,6 kV或10 kV外部电缆在现场拖过来移过去,电缆磨损比较严重,危险性极高,为解决此问题,太原重工股份有限公司生产的WK系列挖掘机选配电缆卷筒装置[1]。
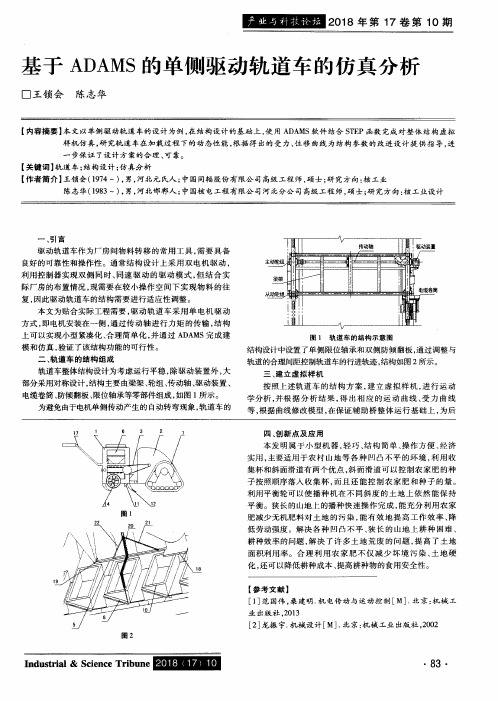
1 电缆卷筒的组成及工作原理1.1 电缆卷筒的组成电缆卷筒由安装支座、钢结构、卷筒装置、马达驱动装置、排缆机构、顶盖及保护罩、轴承润滑装置、电气控制系统等组成(见图1)。
1.2 电缆卷筒的工作原理1)安装支架将电缆卷筒与主机进行连接,上部的连接杆中间带有正反设计的螺纹,拧动中间的连接杆,可以调整电缆卷筒相对主机的水平程度,外部设有锁紧螺母,当位置调整好后将螺母锁紧。
下部为支点销式连接,焊在履带架的法兰外表面。
2)钢结构的主要作用是支撑卷筒并安装辅助元件,保证各传动件之间能平稳运转,同时也是各部件安装的平台,保证其他运行机构正常工作。
3)卷筒用于缠绕或排放电缆,通过两端部轴承座的螺栓整体固定在钢结构上,轴承座内设置有轴承。
理论上卷筒每转一圈,排缆机构横向移动一个电缆节距[2]。
4)排缆机构主要包括排缆装置、传动机构及轨道。
排缆机构的作用是使电缆的缠绕和排放有序进行,让缆绳能够均匀有序地在卷筒上缠绕和排放。
虚拟样机中电缆的建模与仿真
魏发远
【期刊名称】《工程物理研究院科技年报》
【年(卷),期】2004(000)001
【摘要】电缆的建模与仿真在产品开发中具有重要的应用价值,也是目前虚拟样机技术急需解决的难题。
针对电缆属于柔性件的特点,提出了一种基于几何建模和物理建模的综合建模与仿真方法,其基本思路是:几何建模一长度估算一物理建模一行为仿真,如图l所示。
几何建模以电缆连接列表为依据、以产品结构模型为空间约束、按照电缆布线规范,利用人机交互方式进行电缆卡箍位置规划和电缆路径规划,进而建立电缆几何模型。
长度估算利用空间积分方法对几何模型进行积分得到电缆长度。
物理建模将电缆几何模型离散成多个质点单元,各质点单元间通过弹簧连接,弹簧刚度和质点质量根据电缆材料和长度确定,在此基础上建立“质点一弹簧系统”的力学控制方程。
行为仿真根据“质点一弹簧系统”的力学控制方程模拟电缆真实形状及插接过程。
【总页数】2页(P104-105)
【作者】魏发远
【作者单位】无
【正文语种】中文
【中图分类】TP393
【相关文献】
1.ADAMS/rail虚拟样机技术在车辆系统建模及仿真分析中的应用 [J], 朱浩;刘少军;黄中华;饶大可;李龙
2.建模与仿真在空调压缩机虚拟样机开发中的应用 [J], 杨晨;何祖威;黄兰晴;柴红阳
3.防御战车行进间发射虚拟样机建模与仿真 [J], 尚宇晴;付丽强;刘广;涂静;吴烁
4.基于虚拟样机高频破碎锤仿真建模优化 [J], 郑雁南;杨国平;邹超;宋琴琴;江奎
5.防御战车行进间发射虚拟样机建模与仿真 [J], 尚宇晴;付丽强;刘广;涂静;吴烁因版权原因,仅展示原文概要,查看原文内容请购买。
基于虚拟样机技术的防爆电缆卷筒产品开发王桂梅,杨立洁,段楠河北工程学院 (056038)摘 要:地下以电为动力源的移动设备如果安装了防爆电缆卷筒则可以提高其机动灵活性,并增强设备的安全性,目前国内外还未见类似产品。
因此有必要开发防爆电缆卷筒产品。
为使电缆卷筒的设计制造更加快速、可靠,本文首先利用Pro/Engineer进行防爆电缆卷筒的设计,创建其整体模型,然后将其模型转换到ADAMS中,进行仿真和运动学动力学分析,从而完成了防爆电缆卷筒的虚拟样机设计。
在设计过程中依据《煤矿安全规程》对防爆电缆卷筒进行了防爆检验。
结果表明,运用上述方法,可以大大缩短新产品的研发时间,设计结果安全可靠。
本文的方法还可以进一步应用到其他产品设计中。
关键词:电缆卷筒,防爆,虚拟设计,Pro/Engineer,ADAMS1、前言以电为驱动源的地下设备不得不拖带很长的电缆,使得电缆长期在复杂的采场地面拖拽,有时操作人员不注意,可能碾压电缆,电缆被拖拽受到磨损,极易发生导电、漏电现象,从而引发人身、设备事故,同时也使车辆的机动性受到很大限制。
解决这一问题的途径可以有两个方案:一是加装卷缆装置;二是采用其它无需从井下电网取电的设备,如使用防爆柴油机或用蓄电池向电机提供电源 [1]。
目前国内外大型防爆柴油机产品已经较为成熟,在许多大型矿山的地下开采及运输中已广泛采用,但小型防爆柴油机产品还未成熟;用蓄电池向电机提供电源则不需要向电网取电,因而也不存在电缆的收放问题,但蓄电池能够提供的电力及其持续时间非常有限。
故针对地下以电为动力源的小型移动设备,安装电缆卷筒较合适。
安装了防爆电缆卷筒则可以提高其机动灵活性,并增强设备的安全性,目前国内外还未见类似产品。
因此有必要开发防爆电缆卷筒产品。
虚拟样机(Virtual prototype)技术是指在产品设计开发过程中,将分散的零部件设计和分析技术揉合在一起,在计算机上建造出产品的整体模型,并针对该产品在投入使用后的各种工矿进行仿真分析,预测产品的整体性能,进而改进产品设计、提高产品性能的一种新技术[2]。
为使防爆电缆卷筒的设计制造更加快速、可靠,本文首先利用Pro/Engineer进行电缆卷筒设计,并建立其整体模型,然后将其转换到ADAMS中,进行仿真和运动学动力学分析,从而完成了防爆电缆卷筒的虚拟样机设计[3][4]。
在设计过程中依据《煤矿安全规程》对防爆电缆卷筒进行了防爆检验。
结果表明,运用上述方法,可以大大缩短新产品的研发时间,设计结果安全可靠。
且本文的设计方法还可以进一步应用到其他产品设计中。
2、软件简介Pro/Engineer是美国参数技术公司(Parametric Technology Corporation,简称PTC)的产品。
Pro/Engineer用户界面简洁,概念清晰,符合工程人员的设计思想与习惯。
整个系统建立在统一的数据库上,具有完整而统一的模型,系统独立于硬件,便于移植[5]。
Pro/Engineer的主要功能有:(1)真正的全相关性,任何地方的修改都会自动反映到所有相关地方;(2)具有真正管理并发进程、实现并行工程的能力;(3)具有强大的装配功能,能够始终保持设计者的意图;(4)容易使用,可极大的提高设计效率。
ADAMS (Automatic Dynamic Analysis of Mechanical System) 即为机械系统动力学分析软件,该软件是世界上占有率最高的机械系统仿真MSS (Mechanical System Simulation)软件[6],也是世界上应用最广泛且最具有权威的机械系统运动力学仿真软件[2]。
工程师、设计人员利用ADAMS软件能够建立和测试虚拟样机,实现在计算机上仿真分析复杂机械系统的运动学和动力学性能。
ADAMS可以在多个领域内应用,如航空航天,汽车工程,铁路车辆及装备,工业机械,工程机械等。
ADAMS 软件由若干模块组成,分为核心模块、功能扩展模块、专业模块、工具箱和接口模块5类。
其主要功能有:(1)提供多个通用求解器的基础上,提供丰富的样本库、专用模块。
(2)开放的软件环境为研究人员集成 CAD/CAM/CAE 软件、开发用户专用模块提供了方便。
(3)充分考虑工程应用实际,提供功能齐全的工程分析和优化设计功能。
(4)提供了与控制软件和绘图软件如:MATLAB 和Pro/Engineer 等软件的接口。
(5)提供实体动画显示功能与运动干涉检查。
3、建模及装配3.1 零件建模在Pro/Engineer 环境下进行防爆电缆卷筒的设计。
首先创建了电缆卷筒的零件模型。
具体零件的建模过程不进行详细阐述,大致过程如图1。
电缆卷筒的零件有卷筒、卷筒支架、马达支架、传动轴、空心轴、端盖、电刷、集电环、电刷支架等等。
3.2 总体装配及检验Pro/Engineer 提供了相当丰富的装配类型,装配功能强大。
电缆卷筒的零件模型建立后,进行整体装配,整个装配过程完全是按照设计思路进行,富有人性化,便于人机交互。
图2即为在Pro/Engineer 环境下电缆卷筒的装配模型。
装配完成后对电缆卷筒进行了干涉检验和防爆检验。
其流程见图3。
4、防爆检验及实验结果,对于板外壳,理论上最小厚度为3-4mm,铸铁为不传爆性可通过外壳装配结合面宽度L、临界间隙d kp 来保证(参见表1)[7][8]。
据上述原则,电缆卷筒的外壳设计为820mm [9]完全达到防爆标准,检验合格。
图1 零件建模表1隔爆结合面宽度与临界间隙关系结合面宽度(mm) 25 15 5临界间隙(mm) 1.15-1.17 1.05 0.8图2装配模型(Pro/engineer)5、转换由Pro/Engineer建立的样机模型不能直接导入到ADAMS 中,两个软件之间需安装接口文件,以实现其转换[10]。
转换过程为:在 Pro/Engineer的MECH/Pro菜单选择“Set Up Mechanism-Rigid Body-Automatic”命令,装配体下的各个子装配体会各自生成刚体。
在Pro/Engineer中生成刚体后,继续选择 MECH/Pro菜单下的“Interface-ADAMS/VIEW-Only Write Files”命令,完成两种软件之间的模型转换,在此我们选择转换的类型为Render格式,转换精度设置为最高值10[11]。
图4即为转换到ADAMS 中的三维样机模型。
图4卷筒模型(ADAMS)6、仿真及运动学动力学分析ADAMS采用世界上广泛流行的多刚体系统动力学理论中的拉格朗日方程方法,建立系统的动力学方程。
它选取系统内每个刚体质心在惯性参考系中的三个直角坐标和确定刚体方位的三个欧拉角作为笛卡尔广义坐标,用带乘子的拉格朗日方程处理具有多余坐标的完整约束系统或非完整约束系统,导出以笛卡尔广义坐标为变量的运动学方程。
ADAMS的计算程序应用了吉尔(Gear)的刚性积分算法以及稀疏矩阵技术,大大提高了计算效率[12]。
6.1.1运动学方程的建立ADAMS 程序采用拉格朗日乘子法建立系统运动方程:..()()T T T q d T T q dt q qϕρµθ∂∂0−++=∂∂ 完整约束方程(,)0q t ϕ= 非完整约束方程(6-1) .(,,)0q q t θ=其中 T──── 系统动能; ──── 系统广义坐标列阵; q ──── 广义力列阵; Q ρ──── 对应于完整约束的拉氏乘子列阵;µ──── 对应于非完整约束的拉氏乘子列阵。
6.1.2动力学方程求解把(6-1)式写成更一般的形式:.(,,,,)0F q u u t λ=..(,)0G u q u q =−=(,)0q t φ= (6-2)其中 ────广义坐标列阵; ,u ────广义速度列阵;q .q λ────约束反力及作用力列阵;F ────系统动力学微分方程及用户定义的微分方程(如用于控制的微分方程、非完整约束方程);φ────描述约束的代数方程列阵。
在进行运动学分析时,ADAMS 采用两种算法:(1) 提供三种功能强大的变阶、变步长积分求解程序:GSTIFF 积分器、DSTIFF 积分器和BDF 积分器来求解稀疏耦合的非线性微分代数方程,这种方法适于模拟刚性系统(特征值变化范围大的系统)。
(2) 提供ABAM 积分求解程序,采用坐标分离算法来求解独立坐标的微分方程,这种方法适于模拟特征值经历突变的系统或高频系统。
6.1.2运动学分析运动学分析研究零件自由度系统的位置、速度、加速度和约束反力,因此只需求解系统的约束方程:(,)0n q t φ= (6-2)任一时刻位置的确定,可由约束方程的Newton-Raphson 迭代求得:n t|(j j j n q q q,)t φφ∂∆=−∂ (6-3) 其中,,1j j q q q +∆=−j j 表示第j 次迭代。
n t 时刻速度、加速度的确定,可由约束方程求一阶、二阶时间导数得到:.()q q tφφ∂∂=−∂∂ (6-4) 22......211(){()()n n k l k l k lq q q q q t q q t t q t φφφφφ==∂∂∂∂∂∂∂=−+++∂∂∂∂∂∂∂∂∑∑}q (6-5) n t 时刻约束反力的确定,可由带乘子的拉格朗日方程得到:.(){()()T T d T T Q q dt qq T φλ∂∂∂=−++∂∂∂ (6-6)针对转换为ADAMS 中的电缆卷筒模型,首先利用ADAMS 软件中提供的约束库、力库等建模模块,给电缆卷筒添加约束、力及力矩。
完成这些设置之后,在马达上添加驱动,设置转速为默认值。
利用主工具箱中的Simulation 进行运动仿真。
设置仿真类型(Simulation type)为Default,设置仿真的终止时间(End Time)为5.0,仿真工作步长(Step Size)为0.1,开始进行仿真。
仿真完成后,进行运动学动力学分析。
图5即为在默认驱动转速为30rad/s 下,电缆卷筒上的马达上转动副JOINT_15和卷筒质心ROLLER_GROUP_CM 的角加速度随时间的变化曲线。
(a ) 转动副JOINT_15的扭矩(b)卷筒质心ROLLER_GROUP_CM的加速度图57、结论本文在Pro/Engineer中对防爆电缆卷筒进行了设计、建模及装配[13],在ADAMS中对其模型进行了仿真和运动学动力学分析[14],其测试结果达到了预期目的。
本文通过实例说明了利用三维建模软件Pro/Engineer以及动力学仿真软件ADAMS的无缝连接[15],对机构进行设计,有利于节省设计时间,提高设计效率,保证设计质量。
这种方法大大提高了设计效率,对电缆卷筒进行虚拟设计研究,是一个良好的开端,我们将从电缆卷筒开始将虚拟设计延伸到更加广泛的领域内。