各向异性磁阻传感器
- 格式:ppt
- 大小:1.20 MB
- 文档页数:9
第31卷第4期大学物理实验Vol.31No.42018年8月PHYSICALEXPERIMENTOFCOLLEGEAug.2018收稿日期:2018 ̄04 ̄19∗通讯联系人文章编号:1007 ̄2934(2018)04 ̄0009 ̄04基于各向异性磁阻传感器灵敏度与分辨率的探讨黄少楚ꎬ冯晓明ꎬ卢丽卿ꎬ谭诗谣ꎬ陈嘉华ꎬ曾育锋∗(华南师范大学ꎬ广东广州㊀510006)摘要:阐述了一种针对ZKY ̄CC各向异性磁阻(AMR)传感器灵敏度与分辨率的测量方法ꎮ通过改变传感器周围磁场来探究毫特斯拉计显示数值和AMR传感器电压显示值之间的关系ꎬ确定出AMR传感器在不同放大倍数下的灵敏度与分辨率ꎬ同时测定出参考的数值表ꎮ由此ꎬ使用者能够在未知放大倍数的条件下使用仪器进行磁场的测量ꎬ从而提高了AMR传感器的使用效果ꎬ保证仪器能够更好地服务于相关的科技活动ꎮ关键词:AMR磁阻传感器ꎻ灵敏度ꎻ分辨率中图分类号:O4 ̄34文献标志码:ADOI:10.14139/j.cnki.cn22 ̄1228.2018.04.003㊀㊀各向异性磁阻(AMR)传感器是以磁电阻效应为原理的新型磁敏元件ꎬ是传感器技术的一个重要组成部分ꎬ它具有微型化㊁高灵敏度㊁体积小㊁低功耗㊁可靠性高㊁易集成㊁易批量生产等优点[1ꎬ2]ꎮ目前ꎬAMR传感器被广泛应用于磁场测量㊁电流测量㊁角度测量和导航定向ꎬ其应用的领域包括航天㊁航空㊁卫星通信等[3ꎬ4]ꎮ可见ꎬAMR传感器有较高的研究应用价值ꎮZKY ̄CC各向异性磁阻传感器与磁场测量仪可以针对不同的磁场进行测量并且会以电压大小的形式显现出来ꎬ其测量同样具有高灵敏度ꎮ而在对ZKY ̄CC各向异性磁阻传感器与磁场测量仪实验原理的研究中发现ꎬ仪器的灵敏度和分辨率会随着使用人员选择的放大倍数不同而产生变化ꎮ现有的仪器需要选到特定的放大倍数下才会有已知的电压输出值与磁场测量值的关系ꎬ使用者需根据说明书进行繁杂的调整过程后才能得到具体的电压输出值与磁场测量值关系ꎬ需要消耗一定的时间ꎮ因此ꎬ本文提出了一种针对该仪器在不同的放大倍数下的灵敏度和分辨率测量方法ꎮ通过该方法ꎬ可以测量出该仪器在不同的放大倍数下的灵敏度与分辨率ꎬ寻找出不同放大倍数下仪器感应到的磁场的大小值和仪器电压输出值的关系ꎮ同时ꎬ本文还针对放大倍数最大值与放大倍数最小值下二者的关系进行测定ꎬ给出具体的关系数值ꎮ1㊀实验原理1.1㊀各向异性磁阻传感器的原理AMR各向异性磁阻的基本单元是用一种长而薄的沉坡莫合金(Ni80 ̄Fe20)并且使用半导体工艺沉积在硅衬底上制成的[5]ꎮ它是一种可接受磁信号ꎬ并可按一定规律转换成可用输出信号的器件或装置[6]ꎮ如果沉积时存在外加的磁场ꎬ则会形成易磁化轴方向ꎮ铁磁材料的电阻受电流和磁化方向的夹角影响ꎮ当电流方向和磁化方向互相平行时ꎬ铁磁材料的电阻为最大值Rmaxꎬ当它们互相垂直时ꎬ铁磁材料的电阻为最小值Rminꎬ当它们成θ角时ꎬ铁磁材料的电阻表示为:R=Rmin+(Rmax-Rmin)cos2θ在磁阻传感器中ꎬ为了避免温度变化等因素对电桥输出产生影响ꎬ在传感器的组成上由4个相同的磁阻元件构成惠斯通电桥ꎮ如图1所示ꎬ在电桥中电流方向与易磁化轴方向的夹角为45ʎꎮ理论分析和实验表明ꎬ当采用45ʎ偏置磁场并且沿与易磁化轴垂直的方向施加外磁场时ꎬ电桥的输出与外加磁场强度呈线性关系ꎮ图1㊀惠斯通电桥示意图当无外加磁场或外加磁场方向与易磁化轴方向平行时ꎬ电桥的4个桥臂电阻阻值相同ꎬ电桥输出为零ꎮ当在磁敏感方向施加如图1所示方向的磁场时ꎬ合成磁化方向将在易磁化方向的基础上进行逆时针方向的旋转ꎮ当左上和右下桥臂电流方向与磁化方向的夹角增大ꎬ电阻减小ΔRꎻ当右上与左下桥臂电流与磁化方向的夹角减小ꎬ电阻增大ΔRꎮ在对电桥的基本原理分析后可知ꎬ电桥的输出电压表示值为:U=VbˑΔR/R式中Vb为电桥工作电压ꎬ为一恒定值ꎬR为电桥的桥臂电阻ꎬΔR/R为磁阻阻值的相对变化率ꎮ而磁阻阻值的相对变化率ΔR/R为与外加磁场强度B成正比ꎬ即:ΔRRɖB由此可以看出ꎬAMR磁阻传感器的输出电压U与外加磁场强度B成正比ꎬ因此可利用磁阻传感器测量磁场ꎮU=KˑB其中K为常数ꎬ即仪器的灵敏度ꎬ与仪器中放大器的放大倍数有关ꎮ当仪器放大倍数旋钮拧至最右端时ꎬ有放大倍数最大值ꎬ对应K的最大值ꎻ当仪器放大倍数旋钮拧至最左端时ꎬ有放大倍数最小值ꎬ对应K的最小值ꎮ1.2㊀仪器灵敏度与分辨率[7 ̄10]传感器灵敏度是指传感器对被测量变化的反应能力ꎬ是传感器的基本指标ꎮ传感器输出的变化量Δy与引起该变化量的输入变化量Δx之比即为其灵敏度Kꎬ其表达式为:K=Δy/Δx通过上述分析ꎬ在AMR磁阻传感器中ꎬ由于使用者可能会根据实际情况选用不同的放大倍数ꎬ因此会带来不同的仪器灵敏度Kꎮ当放大倍数调整至最大或者最小时ꎬ仪器可得到一个最高或最低的灵敏度ꎬ但对应的数值是未知的ꎬ因此需要进行测量ꎮ而传感器的分辨率表示传感器能检测到输入量的最小变化能力ꎬ当传感器的输入量缓慢变化ꎬ超过某一增量时ꎬ传感器才能够检测到输入量的变化ꎮ在AMR磁阻传感器中ꎬ其分辨率表示能检测到的最小磁场变化量ꎮ由于灵敏度乘以输出量的最小值等于分辨率ꎬ因此需要先根据定义算出灵敏度ꎬ再根据这个关系得到分辨率ꎮ2㊀探究过程与结果针对ZKY ̄CC各向异性磁阻传感器(AMR)的放大器为最大放大倍数㊁最小放大倍数㊁仪器说明书参考倍数这3情况下进行探究ꎮ实验中使用磁铁来提供磁场ꎬ并且结合毫特斯拉计进行辅助使用ꎬ使毫特斯拉计探头与AMR磁阻传感器探头测量位置与测量方向一致ꎬ其装置图见图2ꎮ图2㊀装置示意简图将磁铁放在迈克尔逊干涉仪的拖板上ꎬ调节粗调手轮使拖板进行微小位移的移动ꎬ以改变磁铁与磁阻传感器之间的距离ꎬ进而改变磁阻传感器感应到的磁场大小ꎮ在磁场测量仪输出端的电压显示值U发生变化的瞬间ꎬ记录此时毫特斯拉01基于各向异性磁阻传感器灵敏度与分辨率的探讨计显示的数值Bꎬ重复实验并记录数据ꎬ分析得到两者的关系ꎮ在多次测量取平均值后ꎬ将AMR传感器放大倍数为最大值时的数据于MATLAB软件中使用曲线拟合工具箱(CurveFittingToolbox)做曲线拟合[11]ꎬ以U为横轴ꎬ以B为纵轴ꎬ拟合出B ̄U曲线ꎬ见图3ꎮ图3㊀放大倍数最大值下的B ̄U图㊀㊀该曲线的拟合方程为B=0.3621U+0.0104ꎻ相关系数为0.999ꎬ可知其拟合的效果特别好ꎮ通过对拟合方程的斜率进行分析ꎬ可知在放大倍数为最大值的情况下ꎬ传感器的灵敏度为0.3621mT/mVꎻ而由于仪器电压的输出最小值为0.001mVꎬ所以可知在该放大倍数下传感器的分辨率为3.621ˑ10-4Tꎮ而在选用不同的放大倍数下ꎬ亦可选用此方法寻找出传感器的灵敏度与分辨率ꎬ确定出该传感器电压输出值U和感应到的磁场B之间的关系ꎮ在同样条件下ꎬ对放大倍数为说明书参考值㊁最大值㊁最小值的3种情况再次实验ꎬ得到如下结果ꎬ见表1ꎮ表1㊀不同放大倍数下灵敏度测定值放大倍数最小值说明书参考倍数(50倍)最大值灵敏度/mT/mV0.14020.25040.3621分辨率/ˑ10-4T1.4022.5043.621在该方法的基础上ꎬ在说明书参考倍数下的所得结果与说明书提供参考值相同ꎬ因此可知该方法的测量结果具有很高的准确度ꎮ由此ꎬ仪器使用者可以通过将放大倍数旋钮拧至最大值或最小值后参考此表直接使用仪器进行测量ꎬ避免了调节仪器带来的不便ꎮ3㊀结㊀论本文研究了AMR磁阻传感器的原理以及针对该传感器提出一种确定传感器灵敏度与分辨率的方法ꎮ该方法可以在仪器选用不同的放大倍数时ꎬ确定出仪器输出电压值U和感应到的磁场值B之间的关系ꎮ通过此方法ꎬ仪器使用者不需要再遵循仪器指导书不断调整仪器参数至固定的放大倍数后再确定U和B的关系ꎬ而是可以在未知的放大倍数下直接得到U和B的具体关系ꎮ此外ꎬ本文还测定出放大倍数为最大值或最小值下的仪器输出电压值U和感应到的磁场值B之间的关系ꎬ使得后续的仪器使用者可以通过查阅表格后快速进行测量ꎬ从而提高效率ꎮ因此ꎬ该方法有助于AMR磁阻传感器的拓展应用ꎬ为后续的仪器使用提供便利ꎮ参考文献:[1]㊀张晓明ꎬ杨国欢ꎬ赖正喜ꎬ等.各向异性磁电阻传感器高精度测试技术[J].测试技术学报ꎬ2015(1):73 ̄77.[2]㊀曹育锋ꎬ卢丽卿ꎬ谭诗谣ꎬ等.基于AMR测直流电流的探究[J].大学物理实验ꎬ2018(1):9 ̄12.11基于各向异性磁阻传感器灵敏度与分辨率的探讨[3]㊀周勋ꎬ梁冰清ꎬ唐云俊ꎬ等.磁电阻效应的研究进展[J].物理实验ꎬ2000ꎬ20(9):13 ̄16.[4]㊀王帅英.用于地磁测量的各向异性磁阻传感器研究[D].华中科技大学ꎬ2008.[5]㊀裴轶ꎬ虞南方ꎬ刘奇ꎬ等.各向异性磁阻传感器的原理及其应用[J].仪表技术与传感器ꎬ2004(8):26 ̄27+32.[6]㊀陈雁.各向异性磁电阻传感器的研究[D].中国科学院研究生院:电子学研究所ꎬ2006.[7]㊀赵福海.桥臂电阻对惠斯通电桥灵敏度的影响[J].绵阳师范学院学报ꎬ1999(5):30 ̄33. [8]㊀孙传友ꎬ吴爱平.感测技术基础[M].电子工业出版社ꎬ2015:78 ̄93.[9]㊀李希胜ꎬ刘艳霞ꎬ康瑞清ꎬ等.各向异性磁阻传感器灵敏度在线辨识技术[J].北京科技大学学报ꎬ2011ꎬ33(7):895 ̄898.[10]谢晓芳.测量仪器的特性评定以及计量报告的使用[J].玻璃钢ꎬ2012(4):25 ̄27.[11]胡庆婉.使用MATLAB曲线拟合工具箱做曲线拟合[J].电脑知识与技术ꎬ2010(21):5822 ̄5823.ResearchonSensitivityandResolutionofAMRHUANGShao ̄chuꎬFENGXiao ̄mingꎬLULi ̄qingꎬTANShi ̄yaoꎬCHENJia ̄huaꎬZENGYu ̄feng∗(SouthChinaNormalUniversityꎬGuangdongGuangzhou510006)Abstract:ItdescribesamethodformeasuringthesensitivityandresolutionofZKY ̄CCanisotropicmagnetoresistive(AMR)sensors.BychangingthemagneticfieldaroundthesensortoexploretherelationshipbetweenthedisplayedvalueofthemillstoneandthedisplayvalueoftheAMRsensorvoltageꎬwedeterminedthesensi ̄tivityandresolutionoftheAMRsensoratdifferentmagnifications.Thismethodenablestheuseroftheinstru ̄menttomeasurethemagneticfieldusingthesensorunderunknownmagnificationꎬwhichimprovestheuseofAMRsensorsandhelpinstrumentbetterserverelatedscientificandtechnologicalactivities.Keywords:AMRreluctancesensorꎻsensitivityꎻresolution21基于各向异性磁阻传感器灵敏度与分辨率的探讨。
华中科技大学硕士学位论文用于地磁测量的各向异性磁阻传感器研究姓名:王帅英申请学位级别:硕士专业:微电子学与固体电子学指导教师:杨晓非20080530华中科技大学硕士学位论文摘要地球磁场作为地球的基本资源之一,与人类生活、生产息息相关,它在地球科学、航空航天、资源探测、交通通讯、国防建设、地震预报等方面都有着重要的应用。
鉴于地磁场的重要应用价值,人们对地磁场的测量提出了更高的要求和希望。
选择或者设计一种符合地磁测量要求的弱磁传感器是问题的关键。
由于各向异性磁阻传感器具有高灵敏度、高可靠性、良好线性性、低功耗、易于微型化等优点,因而改进或者优化各向异性磁阻传感器的性能使其满足地磁测量的要求具有一定的现实意义。
本文以各向异性磁阻传感器(AMR sensor)作为研究对象,结合地磁测量的相关要求,对各向异性磁阻效应原理以及各向异性磁阻传感器的薄膜制备、器件结构设计、器件制备工艺等方面的内容进行了研究和探讨,主要内容包括以下几个方面:首先,在分析了各向异性磁阻效应原理的基础上,综述了各向异性磁阻材料的研究现状,并结合地磁场的特点,讨论了各向异性磁阻传感器的特性参数以及用于地磁测量的优势和挑战。
其次,在传感器材料方面,本文采用磁控溅射的方法制备了AMR薄膜,分别对膜层结构、薄膜厚度、退火温度等因素进行了研究。
利用NiFeCr或Al2O3作为辅助种子层、退火工艺对薄膜性能进行了优化,分析并讨论了材料本身和工艺方面对实验结果的影响。
实验制备出磁阻曲线光滑且峰值明显的磁阻材料,最大磁阻系数为1.5%。
最后,在器件结构方面,本文分别对惠斯通电桥、barber 电极、置位/复位电流带和偏置电流带等结构的设计思路进行了研究和探讨,然后利用L-edit设计了磁阻单元、惠斯通电桥和置位/复位电流带的掩膜版,讨论并梳理了器件制备的工艺流程。
关键词:地磁场各向异性磁阻传感器坡莫合金(Ni83Fe17)89Cr11 Al2O3华中科技大学硕士学位论文AbstractAs one of the important earth resources, the geomagnetic field is closely linked with the modern production and life. It is needed for many aspects such as the geosciences, aeronautics, astronautics, resource probing, transportation, national defense construction, earthquake prediction and so forth. However all the above mentioned are based on weak magnetic sensors to detect the geomagnetic field which changes with time and space. The anisotropic magnetoresistive sensor (AMR sensor) has the merits of high sensitivity, high reliability, good linearity, low power consumption, easy miniaturization and so on. Therefore, it is very important to improve or optimize the performances of the AMR sensor to satisfy the requirements of geomagnetic measurement. In regard to the requirements to detect the geomagnetic field, the principles, the material and the structures of the anisotropic magnetoresistive sensors were studied in the thesis. The main contents are as follows:Firstly, with the principle of the anisotropic magnetoresistance effect, current research progress of the anisotropic magnetoresistance material was introduced. Then based on the characteristics of geomagnetic field, the pros and cons of the application of AMR sensors in the geomagnetic field measurement were discussed.Secondly, the anisotropic magnetoresistance films (Permalloy films) were prepared with magnetron sputtering method. And their structure, thickness and annealing temperature were studied. The Permalloy films were optimized with NiFeCr or Al2O3 as assisted seed layers and annealing technique. Measurement showed that the magnetoresistance curve of the material was quite smooth, and obvious peaks were found. The best magnetoresistance coefficient (R/ R) of the material reached a maximum of 1.5%.In the last chapter, the structure of the AMR sensor, including the wheatstone bridge, barber pole and current strap was investigated, and the lithography masks were designed with L-edit, also the process for the devices preparation and lithography process were stated.Keywords: Geomagnetic field Anisotropic magnetoresistive sensorPermalloy film (Ni83Fe17)89Cr11Al2O3独创性声明本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。
基于OOMMF的各向异性磁阻传感器参数仿真
蒋琪;姜岩峰
【期刊名称】《传感器与微系统》
【年(卷),期】2024(43)1
【摘要】为了提高各向异性磁阻(AMR)传感器的性能,通过仿真模拟的方案来对传感器内部坡莫合金感应层的结构参数进行优化。
利用OOMMF软件仿真坡莫合金薄膜的磁滞回线,使用控制变量法分别对薄膜取不同的厚度和长宽比时的性能进行分析。
从仿真结果中的矫顽力、磁滞损耗等方面对比其磁学性能,并结合实际制备的薄膜表面粗糙度测试结果进行理论分析。
最终,得到较为完整的坡莫合金薄膜结构参数来为AMR传感器性能优化提供理论依据。
【总页数】4页(P65-68)
【作者】蒋琪;姜岩峰
【作者单位】江南大学物联网工程学院
【正文语种】中文
【中图分类】TP212
【相关文献】
1.基于各向异性磁阻传感器灵敏度与分辨率的探讨
2.基于双轴各向异性磁阻传感器电流测量系统的研究
3.一种基于各向异性磁阻(AMR)技术的角位移传感器的原理及设计方案
4.基于各向异性磁阻效应的EPS角度传感器研究
5.基于各向异性磁阻传感器的电子指南针系统
因版权原因,仅展示原文概要,查看原文内容请购买。
北航基础物理实验研究性报告各向异性磁阻传感器(AMR)与地磁场测量第一作者: 13271138 卢杨第二作者: 13271127 刘士杰所在院系:化学与环境学院2015年5月27日星期三摘要物质在磁场中电阻率发生变化的现象称为磁阻效应,磁阻传感器利用磁阻效应制成。
磁场的测量可利用电磁感应,霍耳效应,磁阻效应等各种效应。
其中磁阻效应法发展最快,测量灵敏度最高。
磁阻传感器可用于直接测量磁场或磁场变化,如弱磁场测量,地磁场测量,各种导航系统中的罗盘,计算机中的磁盘驱动器,各种磁卡机等等。
也可通过磁场变化测量其它物理量,如利用磁阻效应已制成各种位移、角度、转速传感器,各种接近开关,隔离开关,广泛用于汽车,家电及各类需要自动检测与控制的领域。
磁阻元件的发展经历了半导体磁阻(MR),各向异性磁阻(AMR),巨磁阻(GMR),庞磁阻(CMR)等阶段。
本实验研究AMR的特性并利用它对磁场进行测量。
关键词:磁阻传感器;磁电转换;赫姆霍兹线圈;车辆检测;罗盘目录一、实验目的 (4)二、实验原理 (4)三、实验仪器介绍 (6)四、实验内容 (8)1.测量前的准备工作 (8)2.磁阻传感器特性测量 (8)a.测量磁阻传感器的磁电转换特性 (8)b.测量磁阻传感器的各向异性特性 (9)3.赫姆霍兹线圈的磁场分布测量 (9)a. 赫姆霍兹线圈轴线上的磁场分布测量 (9)b.赫姆霍兹线圈空间磁场分布测量 (11)4.地磁场测量 (12)五、实验数据及数据处理 (13)1.磁阻传感器特性测量 (13)a.测量磁阻传感器的磁电转换特性 (13)b.测量磁阻传感器的各向异性特性 (14)2.赫姆霍兹线圈的磁场分布测量 (15)a.赫姆霍兹线圈轴线上的磁场分布测量 (15)b.赫姆霍兹线圈空间磁场分布测量 (16)3.地磁场测量 (17)六、误差分析与思考题 (17)1、误差分析 (17)2、思考题 (18)七、实验中注意事项及改进方法 (19)1、注意事项 (19)2、实验改进 (19)八、总结与收获 (20)九、原始数据照片 (20)一、实验目的1.熟悉和了解AMR的原理2.测量磁阻传感器的磁电转换特性和各向异性特性3.测量赫姆霍兹线圈的磁场分布4.测量地磁场磁场强度,磁倾角,磁偏角二、实验原理各向异性磁阻传感器AMR(Anisotropic Magneto-Resistive sensors)由沉积在硅片上的坡莫合金(Ni80 Fe20)薄膜形成电阻。
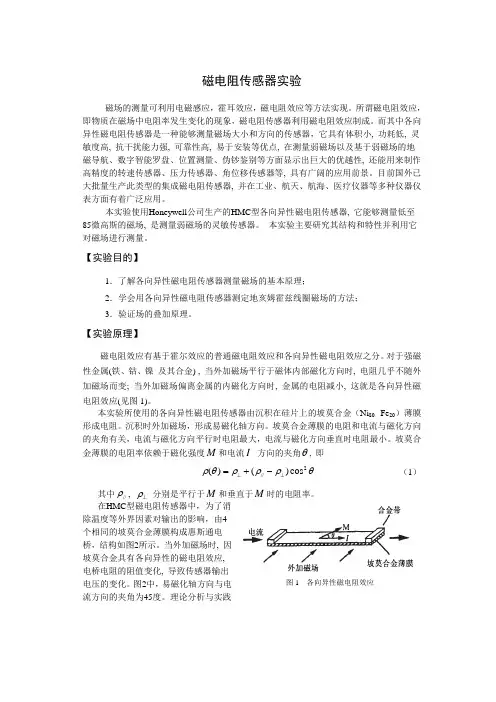
图1 各向异性磁电阻效应 磁电阻传感器实验磁场的测量可利用电磁感应,霍耳效应,磁电阻效应等方法实现。
所谓磁电阻效应,即物质在磁场中电阻率发生变化的现象,磁电阻传感器利用磁电阻效应制成。
而其中各向异性磁电阻传感器是一种能够测量磁场大小和方向的传感器,它具有体积小, 功耗低, 灵敏度高, 抗干扰能力强, 可靠性高, 易于安装等优点, 在测量弱磁场以及基于弱磁场的地磁导航、数字智能罗盘、位置测量、伪钞鉴别等方面显示出巨大的优越性, 还能用来制作高精度的转速传感器、压力传感器、角位移传感器等, 具有广阔的应用前景。
目前国外已大批量生产此类型的集成磁电阻传感器, 并在工业、航天、航海、医疗仪器等多种仪器仪表方面有着广泛应用。
本实验使用Honeywell 公司生产的HMC 型各向异性磁电阻传感器, 它能够测量低至85微高斯的磁场, 是测量弱磁场的灵敏传感器。
本实验主要研究其结构和特性并利用它对磁场进行测量。
【实验目的】1.了解各向异性磁电阻传感器测量磁场的基本原理;2.学会用各向异性磁电阻传感器测定地亥姆霍兹线圈磁场的方法; 3.验证场的叠加原理。
【实验原理】磁电阻效应有基于霍尔效应的普通磁电阻效应和各向异性磁电阻效应之分。
对于强磁性金属(铁、钴、镍 及其合金) , 当外加磁场平行于磁体内部磁化方向时, 电阻几乎不随外加磁场而变; 当外加磁场偏离金属的内磁化方向时, 金属的电阻减小, 这就是各向异性磁电阻效应(见图1)。
本实验所使用的各向异性磁电阻传感器由沉积在硅片上的坡莫合金(Ni 80 Fe 20)薄膜形成电阻。
沉积时外加磁场,形成易磁化轴方向。
坡莫合金薄膜的电阻和电流与磁化方向的夹角有关,电流与磁化方向平行时电阻最大,电流与磁化方向垂直时电阻最小。
坡莫合金薄膜的电阻率依赖于磁化强度M 和电流I 方向的夹角θ, 即θρρρθρ2//cos )()(⊥⊥-+= (1)其中//ρ, ⊥ρ 分别是平行于M 和垂直于M 时的电阻率。
科技与创新┃Science and Technology&Innovation ·58·2017年第19期文章编号:2095-6835(2017)19-0058-03基于各向异性磁阻的车型识别算法*孙晓,夏运贵(湖南工业大学电气与信息工程学院,湖南株洲412007)摘要:在分析已有的各种车辆检测技术和车型识别算法的基础上,为了提高车型识别的高效性和准确度,提出采用各向异性磁阻传感器检测技术。
首先,利用动态基值法来抑制AMR的漂移,然后对原始波形进行小波转换来滤波降噪,再从处理后平稳光滑的波形中提取特征向量,最后代入模糊识别算法计算得出车型。
实验结果表明,基于各向异性磁阻的车型模糊识别算法对车型识别准确率达99%.关键词:各向异性磁阻检测器;小波转换处理;特征提取;模糊识别中图分类号:U495文献标识码:A DOI:10.15913/ki.kjycx.2017.19.058当前,我国的交通信息检测技术主要有超声波、红外、视频传感器以及地磁线圈探测仪[1],但存在易受环境影响或安装维护不便等缺陷,而各向异性磁阻传感器(Anisotropic Magneto Resistive,AMR)作为一种先进的、稳定准确的传感系统,以体积小、低功耗、低成本、安装维护方便灵活、可靠性高等优点,能较好地弥补以上检测技术的不足。
车型识别方法有计算车长归类法、模式匹配法、人工神经网路算法等,这些方法要么粗糙,要么实时性不好,其识别的准确率均偏低。
现介绍一种能充分利用AMR检测波形各种信息的模糊识别算法,实现车型快速、准确识别。
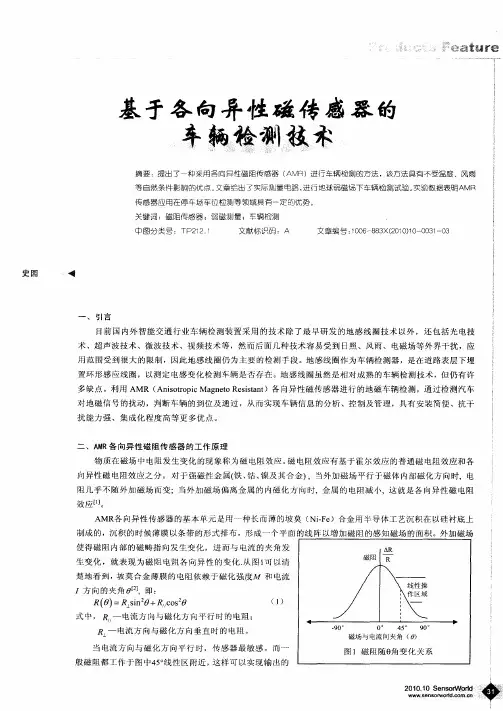
1AMR传感器检测技术1.1检测原理AMR磁阻传感器是利用镍铁导磁合金的磁阻效应,镍铁导磁合金的电阻值与偏置电流(I)和磁场矢量(M)之间的夹角存在函数关系,由镍铁合金薄膜片沉积于硅晶片表面的电阻组成惠斯通电桥,从而将磁场的变化转换为差分电压的形式输出[2]。
AMR传感器能准确检测出地磁场强度和方向上万分之一的变化。
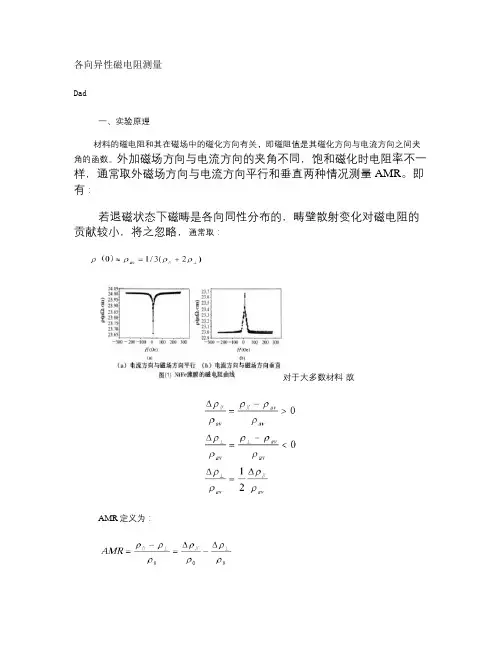
各向异性磁电阻测量Dad一、实验原理材料的磁电阻和其在磁场中的磁化方向有关,即磁阻值是其磁化方向与电流方向之间夹角的函数。
外加磁场方向与电流方向的夹角不同,饱和磁化时电阻率不一样,通常取外磁场方向与电流方向平行和垂直两种情况测量AMR。
即有:若退磁状态下磁畴是各向同性分布的,畴壁散射变化对磁电阻的贡献较小,将之忽略,通常取:对于大多数材料故AMR定义为:如果,则说明该样品在退磁状态下有磁畴结构,即磁畴分布非完全各项同性。
图(1)是曾用作磁盘读出磁头和磁场传感器材料的Ni81Fe19的磁电阻曲线,很明显ρ∥>ρ(0),ρ⊥<ρ(0),各向异性明显。
图中的双峰是材料的磁滞引起的。
图2是一些铁磁金属与合金薄膜的各向异性磁电阻曲线。
二、实验仪器亥姆霍兹线圈、大功率恒流电源、大功率扫描电源、精密恒流源、数字万用表三、实验注意事项1.经试验发现,多次测量时数据会有较大的偏差,因此最好一次性完成完整的测量,即使漏掉个别点也没关系,不必反向改变电流找漏掉的点。
2.实验结束时要将各个电源归零,关闭数字万用表,因实验中电流较大,应注意安全。
3.在记录过程中,在样品电压变化缓慢的区域,线圈电流可以变化的快一些,在样品电压变化快的区域,线圈电流要缓慢变化。
四、实验内容A.方法1.将样品切成窄条,这在测AMR时是必需的。
对磁性合金薄膜,饱和磁化时,样品电阻率有如下关系:其中θ是磁场方向与电流方向的夹角。
为保证电流有一确定方向,常用的方法是:(1)将样品刻成细线,使薄膜样品的宽度远远小于长度。
(2)用平行电极,当电极间距远小于电极长度时,忽略电极端效应,认为两电极间的电流线是平行的。
2.用非共线四探针法测电阻值,如图12.1-10所示。
这种方法当数字微伏表内阻很大时,可以忽略探针接触电阻的影响,已在半导体、铁氧体、超导体等的电测量中广泛使用。
B.测量测量Fe-Ni薄膜的AMRa.将大功率恒流源与亥姆霍兹线圈连接。
北航基础物理实验研究性报告各向异性磁阻传感器(AMR)与地磁场测量第一作者: 13271138 卢杨第二作者: 13271127 刘士杰所在院系:化学与环境学院2014年5月27日星期三摘要物质在磁场中电阻率发生变化的现象称为磁阻效应,磁阻传感器利用磁阻效应制成。
磁场的测量可利用电磁感应,霍耳效应,磁阻效应等各种效应。
其中磁阻效应法发展最快,测量灵敏度最高。
磁阻传感器可用于直接测量磁场或磁场变化,如弱磁场测量,地磁场测量,各种导航系统中的罗盘,计算机中的磁盘驱动器,各种磁卡机等等。
也可通过磁场变化测量其它物理量,如利用磁阻效应已制成各种位移、角度、转速传感器,各种接近开关,隔离开关,广泛用于汽车,家电及各类需要自动检测与控制的领域。
磁阻元件的发展经历了半导体磁阻(MR),各向异性磁阻(AMR),巨磁阻(GMR),庞磁阻(CMR)等阶段。
本实验研究AMR的特性并利用它对磁场进行测量。
关键词:磁阻传感器;磁电转换;赫姆霍兹线圈;车辆检测;罗盘目录一、实验目的 (4)二、实验原理 (4)三、实验仪器介绍 (5)四、实验内容 (8)1.测量前的准备工作 (8)2.磁阻传感器特性测量 (8)a.测量磁阻传感器的磁电转换特性 (8)b.测量磁阻传感器的各向异性特性 (9)3.赫姆霍兹线圈的磁场分布测量 (9)a. 赫姆霍兹线圈轴线上的磁场分布测量 (9)b.赫姆霍兹线圈空间磁场分布测量 (11)4.地磁场测量 (12)五、实验数据及数据处理 (13)1.磁阻传感器特性测量 (13)a.测量磁阻传感器的磁电转换特性 (13)b.测量磁阻传感器的各向异性特性 (14)2.赫姆霍兹线圈的磁场分布测量 (15)a.赫姆霍兹线圈轴线上的磁场分布测量 (15)b.赫姆霍兹线圈空间磁场分布测量 (16)3.地磁场测量 (17)六、误差分析与思考题 (17)1、误差分析 (17)2、思考题 (18)七、实验中注意事项及改进方法 (19)1、注意事项 (19)2、实验改进 (19)八、总结与收获 (20)九、原始数据照片 (20)一、实验目的1.熟悉和了解AMR的原理2.测量磁阻传感器的磁电转换特性和各向异性特性3.测量赫姆霍兹线圈的磁场分布4.测量地磁场磁场强度,磁倾角,磁偏角二、实验原理各向异性磁阻传感器AMR(Anisotropic Magneto-Resistive sensors)由沉积在硅片上的坡莫合金(Ni80 Fe20)薄膜形成电阻。
物理实验报告2014物理学专业实验题目:_ 各项异性磁阻效应及磁场测量姓名: 柯铭沣学号:____135012014071___________日期:__2015_年__9___月__28___日实验 各向异性磁阻传感器及磁场测量[实验目的]1、掌握各向异性磁阻传感器的原理和特性;2、掌握各向异性磁阻传感器测量磁场的基本原理和测量方法。
[实验仪器]磁场测试仪,主要包括底座、转轴、带角刻度的转盘、磁阻传感器的引线、亥姆霍兹线圈、磁场测试仪控制主机(数字式电压表、5 V 直流电源等)。
[实验原理]1、各向异性磁阻传感器一定条件下,导电材料的电阻值R 随磁感应强度B 变化的规律称为磁阻效应。
当半导体处于磁场中时,导体或半导体的载流子将受洛伦兹力的作用而发生偏转,因而沿外加电场方向运动的载流子数量将减少,使得沿电场方向的电流密度减小,电阻增大。
(具体原理详见实验39“半导体材料的磁电阻效应研究”)。
各向异性磁阻传感器(Anisotropic Magneto-Resistive sensors, AMR) 是由沉积在硅片上的坡莫合金( Ni 80Fe 20) 薄膜形成的电阻,如图1所示。
除了具有磁阻效应,由于在沉积时外加磁场,AMR 形成易磁化方向,即当外加磁场偏离合金的内部磁化方向时,材料电阻减小,这就是各向异性磁阻效应。
AMR 的电阻与材料所处环境磁化强度M 和电流I 方向间的夹角有关,电流和磁化方向平行时电阻最大为R max ,而电流与磁化方向垂直时电阻最小为R min ,则电流和磁化方向成θ时, 电阻可表示为:()θ2min max min cos R R R R -+= (1)图1磁阻传感器的构造示意图 图2磁阻传感器内部结构为了消除温度等外界因素的影响,本实验所用的磁阻传感器是一种单边封装的磁场传感器,传感器由四条铁镍合金磁电阻组成一个非平衡电桥,非平衡电桥输出部分接集成运算放大器,将信号放大输出,内部结构如图2所示。
磁阻传感器/地磁场测量一、 关于磁阻传感器磁阻效应传感器是根据磁性材料的磁阻效应制成的一种传感器。
广泛应用于工业,汽车制造,以及可用于地磁场测量。
二、 磁阻传感器原理(如图1)磁性材料(如坡莫合金)具有各向异性,对它进行磁化时,其磁化方向将取决于材料的易磁化轴、材料的形状和磁化磁场的方向。
当给带状坡莫合金材料通电流时,材料的电阻取决于电流的方向与磁化方向的夹角。
如果给材料施加一个磁场B(被测磁场),就会使原来的磁化方向转动。
如果磁化方向转向垂直于电流的方向,则材料的电阻将减小;如果磁化方向转向平行于电流的方向,则材料的电阻将增大。
磁阻效应传感器一般有四个这样的电阻组成,并将它们接成电桥。
在被测磁场B 作用下,电桥中位于相对位置的两个电阻阻值增大,另外两个电阻的阻值减小。
在其线性范围内,电桥的输出电压与被测磁场成正比。
三、 磁阻传感器/地磁场测量的实验过程(如图2)1.将磁阻传感器放在赫姆霍兹线圈公共轴线中点,使管脚和磁感应强度方向平行。
2. 从0开始每隔10mA 改变励磁电流,分别测量出励磁电流为正向和反向时磁阻传感器的输出电压1U 和2U ,2/)(21U U U -=。
测正向和反向两次,目的是消除地磁沿亥姆霍兹线圈方向(水平)分量的影响。
3.用亥姆霍磁线圈产生的磁场磁感应强度作为已知量,采用最小二乘法拟合,测量磁阻传感器的灵敏度K 。
4.将磁阻传感器平行固定在转盘上,调整转盘至水平(可用水准器指示)。
水平旋转转盘,找到传感器输出电压最大方向,这个方向就是地磁场磁感应强度的水平分量∥B 的方向。
记录此时传感器输出电压1U 后,再旋转转盘,记录传感器输出最小电压2U ,由∥KB U U =-2/21,求得当地地磁场水平分量∥B 。
5.将带有磁阻传感器的转盘平面调整为铅直,并使装置沿着地磁场磁感应强度水平分量∥B 方向放置,只是方向转900。
转动调节转盘,分别记下传感器输出最大和最小时转盘指示值和水平面之间的夹角1β和2β,同时记录此最大读数'1U 和'2U 。