调门标定步骤
- 格式:doc
- 大小:317.00 KB
- 文档页数:2
气动(电动)调整门操作说明(补充版)气/电动门操作说明一、气动调整门(气动隔离门)操作方法:气动门调整门可以根据进气方式不同,失气后也会出现三种不同情况,大致分成:如上部进气的为失气全开,下部进气为失气全关,上下均有进气的为失气(短时)可自保持。
大部气动门均有强制手轮,可进行阀门手动操作,如遇紧急情况可根据下列情况进行操作。
(一般气动调整门前后均有手动门及旁路门,可进行调节操作)有压疏水气动门需会手动操作。
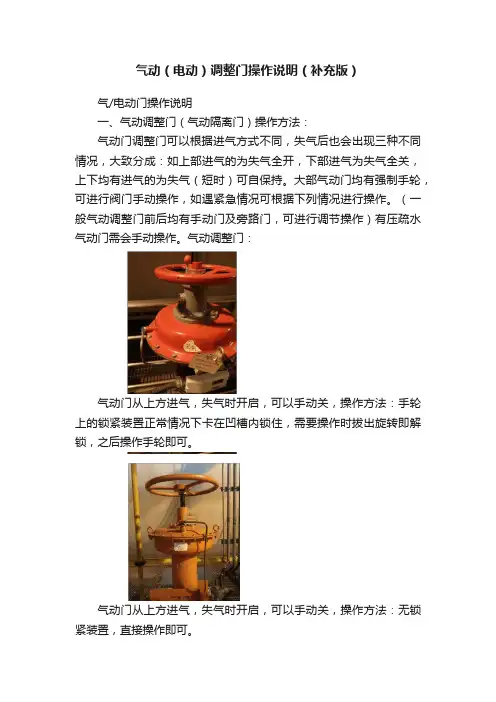
气动调整门:气动门从上方进气,失气时开启,可以手动关,操作方法:手轮上的锁紧装置正常情况下卡在凹槽内锁住,需要操作时拔出旋转即解锁,之后操作手轮即可。
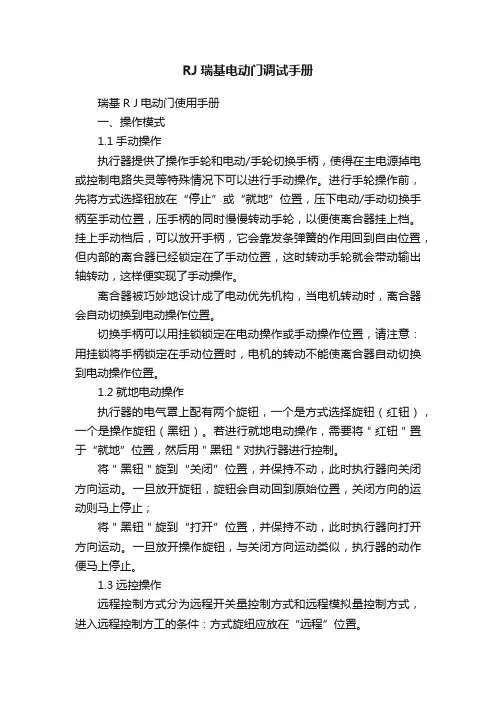
气动门从上方进气,失气时开启,可以手动关,操作方法:无锁紧装置,直接操作即可。
气动门从下方进气,失气时关闭,可以手动开,操作方法:旋松阀门门杆套上螺丝,之后操作手轮。
气动门上下方均进气,失气时保位(如除氧器主、副调整门),可以手动开启、关闭。
操作方法:正常运行中销子卡在手轮凹槽中,起到锁紧作用,阀门门杆套上有限位装置,在OPENING位置阀门无法关,在CLOSING位置时阀门无法开,在中间NEUTRAL位置时可正常开关,需操作时拨开销子,操作手轮即可。
高压主汽门前疏水气动门,操作方法:阀门上有2个连杆,左侧短的为解锁装置,正下方的为啮合装置,正前方为操作手轮,需要操作时拔出解锁装置,同时旋转啮合装置,确认啮合后手动操作手轮即可。
二、电动门/电动调整门:1、ROTORK电动门操作(如:密封风机进口电动门、减温水电动门):现场照片:操作方法:1)手动就地操作:将旋转红色旋钮至停止位置,压下手动/自动手柄,使其处于手动位置。
然后手动开启/关闭阀门操作(正对电动头,一般顺时针为开;逆时针为关)。
注意:旋转手轮挂上离合器, 使阀门处于手动位置时,若松开手柄,手柄将自动弹回初始位置,不能进行手动操作,且手轮将保持啮合状态, 直到执行器被电动操作, 手轮将自动脱离,回到电机驱动状态。
RJ瑞基电动门调试手册瑞基R J电动门使用手册一、操作模式1.1手动操作执行器提供了操作手轮和电动/手轮切换手柄,使得在主电源掉电或控制电路失灵等特殊情况下可以进行手动操作。
进行手轮操作前,先将方式选择钮放在“停止”或“就地”位置,压下电动/手动切换手柄至手动位置,压手柄的同时慢慢转动手轮,以便使离合器挂上档。
挂上手动档后,可以放开手柄,它会靠发条弹簧的作用回到自由位置,但内部的离合器已经锁定在了手动位置,这时转动手轮就会带动输出轴转动,这样便实现了手动操作。
离合器被巧妙地设计成了电动优先机构,当电机转动时,离合器会自动切换到电动操作位置。
切换手柄可以用挂锁锁定在电动操作或手动操作位置,请注意:用挂锁将手柄锁定在手动位置时,电机的转动不能使离合器自动切换到电动操作位置。
1.2就地电动操作执行器的电气罩上配有两个旋钮,一个是方式选择旋钮(红钮),一个是操作旋钮(黑钮)。
若进行就地电动操作,需要将"红钮"置于“就地”位置,然后用"黑钮"对执行器进行控制。
将"黑钮"旋到“关闭”位置,并保持不动,此时执行器向关闭方向运动。
一旦放开旋钮,旋钮会自动回到原始位置,关闭方向的运动则马上停止;将"黑钮"旋到“打开”位置,并保持不动,此时执行器向打开方向运动。
一旦放开操作旋钮,与关闭方向运动类似,执行器的动作便马上停止。
1.3远控操作远程控制方式分为远程开关量控制方式和远程模拟量控制方式,进入远程控制方工的条件:方式旋纽应放在“远程”位置。
1.3.1远程开关量控制在菜单H-01中,设定远控方式为开关量控制方式(=0,该值为出厂时的缺省值),详细的设定步骤见2.4.3使用菜单设定执行器工作参数之远控方式设定远程开关量控制方式的操作:见3-2远程开关量控制1.3.2 远程自动控制在菜单H-01中,设定远控方式为模拟量控制方式(=1),详细的设定步骤见2.4.3使用菜单设定执行器工作参数之远控方式设定远程模拟量控制方式的操作:见3-3远程模拟量控制二、执行器的工作参数设置2.1按键定义1、方式钮代表的按键:确认键:方式钮从“停止”位置—>“就地”位置,以下简称按下确认键;返回键:方式钮从“停止”位置—>“远程”位置,以下简称按下返回键;2、操作钮代表的按键下移键或减键:操作钮—>“关闭”位置,以下简称按下下移键或减键;上移键或加键:操作钮—>“打开”位置,以下简称按下上移键或加键;2.2液晶显示该执行器的电气罩上配有一字段式液晶显示屏。
阀门校准施工方法
导言
本文档旨在介绍阀门校准施工的方法和步骤。
阀门校准是确保阀门正常运行并保持其精确性和可靠性的重要工作。
方法和步骤
1. 准备工作
- 在进行阀门校准之前,确保所有必要的工具和设备都准备齐全。
- 清洁阀门及其周围区域,以确保操作的安全性。
- 确认校准所需的规格和要求。
2. 校准前检查
- 检查阀门外观和密封状况,如有磨损或泄漏,需要及时进行维修或更换。
- 确认阀门的操作方式和校准方法,根据制造商提供的相关资料进行操作。
3. 校准过程
- 关闭阀门并且记录阀门初始位置。
- 使用合适的工具,根据要求逐步调整阀门,使其达到预定的校准标准。
- 在调整过程中,密切观察阀门的变化并记录下来。
- 校准完成后,再次检查阀门的外观和密封状况,并进行必要的测试来确认校准效果。
4. 校准后处理
- 根据校准结果,制定相应的记录和报告。
- 对校准后的阀门进行标识和标注,以便后续维护和管理。
安全注意事项
1. 在进行阀门校准时,务必遵守相关安全规范和操作要求。
2. 避免在高压或危险环境下进行校准。
3. 使用正确的工具和个人防护装备,确保操作人员的安全。
结论
本文档简要介绍了阀门校准施工的方法和步骤。
校准阀门是确保其正常工作和可靠性的重要步骤,通过按照制造商提供的操作指南和校准标准进行操作,可以保证阀门的准确性和稳定性。
在操作
过程中,务必注意安全,遵守相关规范和要求,以确保操作人员的安全和工作的顺利进行。
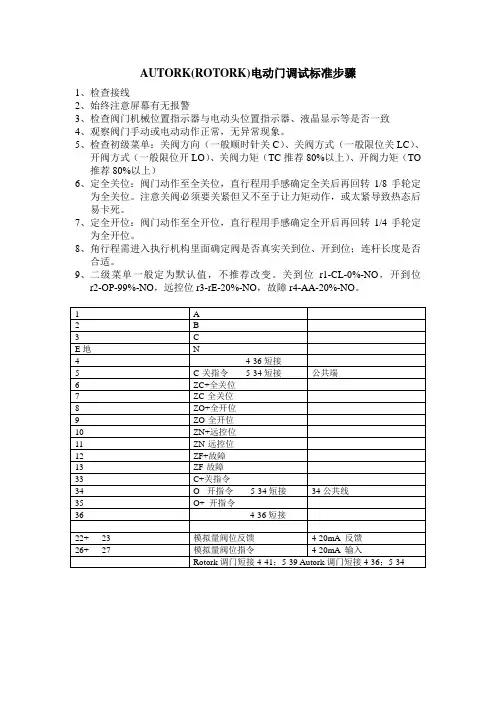
AUTORK(ROTORK)电动门调试标准步骤1、检查接线2、始终注意屏幕有无报警3、检查阀门机械位置指示器与电动头位置指示器、液晶显示等是否一致4、观察阀门手动或电动动作正常,无异常现象。
5、检查初级菜单:关阀方向(一般顺时针关C)、关阀方式(一般限位关LC)、开阀方式(一般限位开LO)、关阀力矩(TC推荐80%以上)、开阀力矩(TO 推荐80%以上)6、定全关位:阀门动作至全关位,直行程用手感确定全关后再回转1/8手轮定为全关位。
注意关阀必须要关紧但又不至于让力矩动作,或太紧导致热态后易卡死。
7、定全开位:阀门动作至全开位,直行程用手感确定全开后再回转1/4手轮定为全开位。
8、角行程需进入执行机构里面确定阀是否真实关到位、开到位;连杆长度是否合适。
9、二级菜单一般定为默认值,不推荐改变。
关到位r1-CL-0%-NO,开到位r2-OP-99%-NO,远控位r3-rE-20%-NO,故障r4-AA-20%-NO。
ROTORK开关阀的所有的设置步骤:第一步:先检查接线是否正确,以及现场阀门情况。
ROTORK开关阀一般情况接线方式:接电源:1,2,3;E:地线。
短接:4,36短接:5,34 (为点动:触点,即按钮按下接通;)短接,长信号(即按钮一直按下,只需将线接到5号端子上,34号端子空着不接线)不短接。
注:点动:如果铭牌是总线控制的当作开关型用就不需要短接。
如果要将总线型改为开关型,则必须将OD(远程控制源)设定成RE。
关阀:5,33 开阀:5,355公共端反馈:①关到位:6、7;②开到位:8、9。
42,43(或42、44):接远程或者就地线。
(远程和就地,只需要接一组)可以旋动红设按钮(例如红色按钮打到就地,若再用万用表测量42、43,万用表有蜂鸣声,说明这一组是就地。
)10、11,12、13:接故障报警,这两组可任意接一组线(根据用户要求)。
所有参数设定完毕后用万用表指针短接一下34和33号端子,就可实现远程控制。
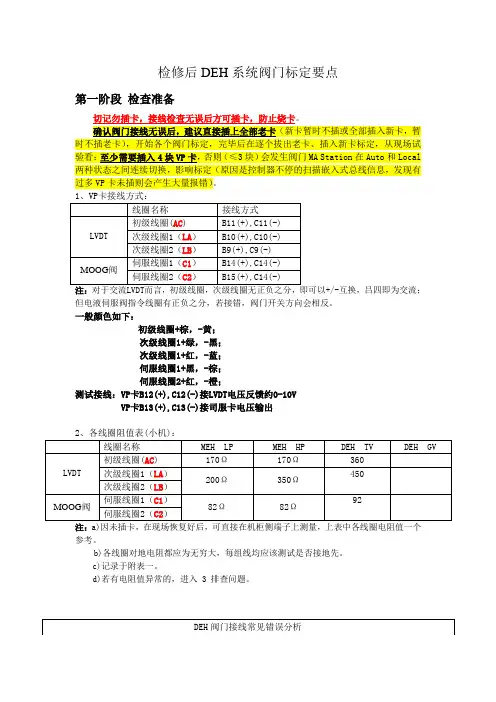
检修后DEH系统阀门标定要点第一阶段检查准备切记勿插卡,接线检查无误后方可插卡,防止烧卡。
确认阀门接线无误后,建议直接插上全部老卡(新卡暂时不插或全部插入新卡,暂时不插老卡),开始各个阀门标定,完毕后在逐个拔出老卡、插入新卡标定,从现场试验看:至少需要插入4块VP卡,否则(≤3块)会发生阀门MA Station在Auto和Local 两种状态之间连续切换,影响标定(原因是控制器不停的扫描嵌入式总线信息,发现有过多VP卡未插则会产生大量报错)。
+/-互换,吕四即为交流;但电液伺服阀指令线圈有正负之分,若接错,阀门开关方向会相反。
一般颜色如下:初级线圈+棕,-黄;次级线圈1+绿,-黑;次级线圈1+红,-蓝;伺服线圈1+黑,-棕;伺服线圈2+红,-橙;测试接线:VP卡B12(+),C12(-)接LVDT电压反馈约0-10VVP卡B13(+),C13(-)接司服卡电压输出注:a)因未插卡,在现场恢复好后,可直接在机柜侧端子上测量,上表中各线圈电阻值一个参考。
b)各线圈对地电阻都应为无穷大,每组线均应该测试是否接地先。
c)记录于附表一。
d)若有电阻值异常的,进入 3 排查问题。
注:a)检修完毕后,如果时间充裕,可在就地接线盒处先检查一遍进线(也是通过测量各线圈阻值)正确无误后将线接上。
b)检查完毕后,再到电子间控制柜侧测量各线圈阻值.c)确认对地电阻是否无穷大后,再将卡件插上。
第二阶段 VP卡调试1、伺服线圈的正负极性确认原则:依据负电压开门,正电压关门。
此步与LVDT等其它设备无任何关系,只要伺服线圈有电压阀门即可动作。
两种方法:法1- - 干电池法:此法可一人就地单独作业a) 备一节1号1.5V新干电池(可用万用表检验电压),就地将接线盒进线的2个伺服线圈接线全甩开。
(注:不要在一对伺服线圈接着,而另一对用电池驱动,这样会烧卡件的。
)b) 用电池驱动其中任一对伺服线圈,若门开,则电池“+”为伺服线圈的“-”;电池“-”为伺服线圈“+”。

FISHERDVC2000智能定位器参数设置方法一,接线图图2二,参数设置:1.先拆下外壳如图2,再按照图1进行接线,接着打开电流发生器电源送入4mA~20mA电流信号,使LCD显示屏打开,然后进行语言选择。
操作方法:上下左右四键同时按住3秒,再用上下键在七种语言中选择您所需要的语种。
之后,按一下向右键以确认。
2.然后根据阀体的执行机构是气开式还是气闭式进行对参数设置。
如图3就是气闭式。
操作方法:按向下键找到“详细设置”选项,再按右键确认进入如果阀体的执行机构是:气开式(FC):按右键查找“零控制信号”项,再按上下键选择“阀关”按右键确认再按右键查找“行程变送器输出4mA”项,按上下键选择“阀关”按右键确认气闭式(FO):按右键查找“零控制信号”项,再按上下键选择“阀开”按右键确认再按右键查找“行程变送器输出4mA”项,按上下键选择“阀关”按右键确认3.行程自动标定设置操作方法:按向下键找到“行程标定”项,按右键确认进入,再按上下键选择“自动”按右键确认,LCD显示“按右键3秒钟阀门将动作”然后按照它的提示操作,它便可以自动搜索走完整个行程0%、100%、50%。
完成后按右键确认。
注:搜索途中不可退出,按任何键都不起作用,必须等走完整个行程才可以。
4.整定设置增益代码(C~M),C时阀门动作最慢,M时阀门动作最快。
选择合适的,一般设置为“L”,以阀门不振荡为准。
操作方法:按向下键找到“整定”项,按右键确认进入,再按上下键选择“自动”按右键确认,LCD显示“按右键3秒钟阀门将动作”然后按照它的提示操作,进入自动整定,接着等待,完成后按右键确认。
以后阀门在使用中出现振荡那就选择“手动”按右键确认,LCD显示“按右键3秒钟阀门将动作”然后按照它的提示操作,进行整定值(增益代码)修改,至阀门不振荡为止。
5.其他参数设置值出厂时都已设置好无须改动,请参见FISHERDVC2000参数设置表。
常见故障及排除方法:若没有输出气压或一直有气压输出,均有I/P堵引起,拆下吹扫干净即可。
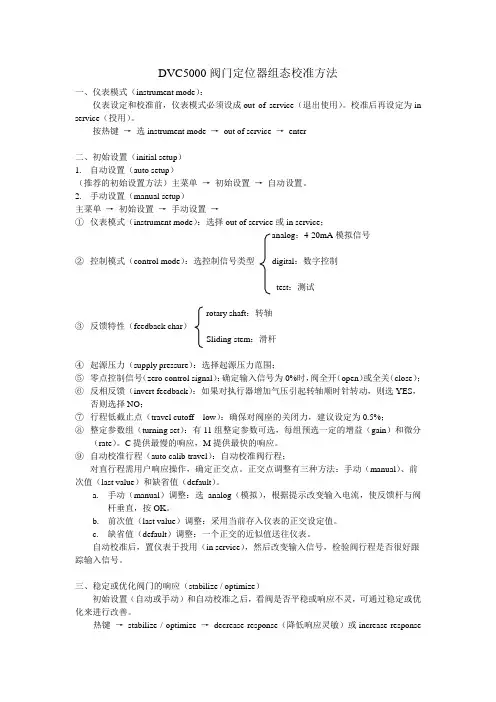
DVC5000阀门定位器组态校准方法一、仪表模式(instrument mode):仪表设定和校准前,仪表模式必须设成out of service(退出使用)。
校准后再设定为in service(投用)。
按热键→选instrument mode →out of service →enter二、初始设置(initial setup)1.自动设置(auto setup)(推荐的初始设置方法)主菜单→初始设置→自动设置。
2.手动设置(manual setup)主菜单→初始设置→手动设置→①仪表模式(instrument mode):选择out of service或in service;analog:4-20mA模拟信号②控制模式(control mode):选控制信号类型digital:数字控制test:测试rotary shaft:转轴③反馈特性(feedback char)Sliding stem:滑杆④起源压力(supply pressure):选择起源压力范围;⑤零点控制信号(zero control signal):确定输入信号为0%时,阀全开(open)或全关(close);⑥反相反馈(invert feedback):如果对执行器增加气压引起转轴顺时针转动,则选YES,否则选择NO;⑦行程低截止点(travel cutoff low):确保对阀座的关闭力,建议设定为0.5%;⑧整定参数组(turning set):有11组整定参数可选,每组预选一定的增益(gain)和微分(rate)。
C提供最慢的响应,M提供最快的响应。
⑨自动校准行程(auto calib travel):自动校准阀行程;对直行程需用户响应操作,确定正交点。
正交点调整有三种方法:手动(manual)、前次值(last value)和缺省值(default)。
a.手动(manual)调整:选analog(模拟),根据提示改变输入电流,使反馈杆与阀杆垂直,按OK。

475阀门标定的步骤一、475阀门标定前的准备咱开始标定475阀门之前呢,得先把要用的工具都找齐了。
比如说一些专门的测量工具呀,还有清洁工具,毕竟阀门要是脏脏的,可能会影响标定结果呢。
然后呢,要确保阀门处于一个比较合适的工作环境,周围不能有太多杂物干扰,也不能有啥危险的东西在旁边。
咱还得检查一下阀门本身有没有啥明显的损坏或者故障,如果有,那肯定得先修好再标定。
二、开始标定475阀门1. 先把阀门开到一个初始的位置,这个位置要记录好哦。
就像是给它做个初始的标记一样,这是很重要的一步。
2. 接着呢,用测量工具来测量阀门的一些关键参数。
比如说阀门的开度啦,压力啦之类的。
这些数据可得仔细测量,不能马虎,因为这些数据就是阀门标定的关键所在。
测量的时候呢,要多测量几次,取个平均值,这样数据才更准确。
3. 然后调整阀门的设置,按照标准的数值或者根据实际需求来调整。
这个调整的过程要慢慢进行,一点点地调,边调边看测量工具的数据变化,就像给阀门做微调一样。
三、标定过程中的检查在标定的过程中,咱们得时不时地停下来检查一下。
看看阀门有没有出现什么异常的声音或者震动,如果有,那可就得小心了,得找出原因来。
也许是调整得太猛了,也许是阀门内部有什么小问题。
而且要再次检查测量的数据是不是还在正常的范围内,如果偏离得太多,那可能前面的步骤就得重新做啦。
四、完成475阀门标定当所有的参数都调整到合适的范围,测量的数据也稳定了,那这个475阀门的标定基本上就完成了。
不过呢,还得最后再整体检查一遍,把所有的数据都记录下来,这些记录可是很有用的,以后要是阀门有啥问题,或者需要再次标定的时候,都可以拿出来参考呢。
而且要把阀门周围清理干净,就像给它一个干净整洁的家一样。
这样,475阀门的标定就圆满结束啦。
调节阀行程校准一、调节阀行程校准的概念调节阀行程校准是指通过对调节阀的行程进行校准,使其达到预定的开度或流量,从而保证系统正常运行的过程。
二、调节阀行程校准的意义调节阀是工业生产中不可或缺的设备,它可以控制流体在管道中的流量和压力等参数。
但是,在长时间使用后,由于各种因素的影响,调节阀会出现行程不准确、漏气等问题,这就需要进行调节阀行程校准来保证其正常运行。
三、调节阀行程校准前的准备工作1.检查设备:在进行调节阀行程校准之前,需要检查设备是否完好无损,并且清理干净。
2.确定标准:在进行调节阀行程校准之前,需要确定标准值。
这个值通常由设计人员提供。
如果没有标准值,则需要通过实验来确定。
3.选择工具:在进行调节阀行程校准之前,需要选择合适的工具。
通常使用千分尺、游标卡尺等精密测量仪器。
4.安装支架:在进行调节阀行程校准之前,需要安装支架,以保证调节阀的稳定性。
四、调节阀行程校准的步骤1.拆卸调节阀:首先需要将调节阀拆卸下来,以便进行行程校准。
2.测量行程:使用千分尺或游标卡尺等精密测量仪器测量调节阀的行程。
3.校准行程:通过旋转螺丝或其他方式来校准调节阀的行程,使其达到标准值。
4.检查漏气:在进行完行程校准之后,需要重新安装调节阀,并检查是否有漏气现象。
5.测试流量:在进行完以上步骤之后,需要进行流量测试,以确保调节阀已经达到预定的开度或流量。
五、常见问题及解决方法1. 调节阀无法拧动:可能是因为螺纹部分生锈或者损坏。
可以使用润滑油和螺纹刀来清理和修复。
2. 行程不稳定:可能是由于密封件老化或者松动导致。
可以更换密封件或者紧固松动部分来解决问题。
3. 漏气现象:可能是由于密封不严或者密封件老化导致。
可以更换密封件或者重新调整密封部分来解决问题。
六、注意事项1. 在进行调节阀行程校准之前,需要先了解调节阀的结构和工作原理。
2. 在进行调节阀行程校准之前,需要确认是否有安全措施,并且遵守相关安全规定。
3. 在进行调节阀行程校准之后,需要对设备进行保养和维护,以延长使用寿命。
几种常见阀门定位器的调校方法阀门定位器概述 (1)电-气阀门定位器VP200(横河)的调校说明 (2)智能阀门定位器 AVP系列(山武)调校说明 (3)智能阀门定位器 SIEMENS(西门子)调校说明 (7)智能阀门定位器DVC系列(费希尔)调试说明 (27)一、阀门定位器概述:阀门定位器:是调节阀的主要附件,通常与气动调节阀配套使用,它接受调节器的输出信号,然后以它的输出信号去控制气动调节阀,当调节阀动作后,阀杆的位移又通过机械装置反馈到阀门定位器,阀位状况通过电信号传给上位系统。
一般可分为以下三种:气动阀门定位:此阀门定位器无电路部分,一般和电-气转换器配合使用,才能实现自动控制功能。
比如Pignone(化肥装置尿素单元PV-1026)、PARCOL(化肥装置尿素单元PV-1026),由于其无法单独实现自动控制,气路繁琐,控制精度低等缺点,逐渐被淘汰。
电-气阀门定位:由于其价格低廉,调校方便,输出稳定等特点,目前仍被广泛使用。
比如VP200(合成氨装置甲醇洗单元和液氮洗单元)等。
智能阀门定位:是目前使用最为广泛的阀门定位器,控制过程中利用智能阀门定位器可实现高品质调节,增加过程控制的精确性和稳定性。
比如SIEMENS、DVC2000-6000系列、AVP100-300系列等。
二、电-气阀门定位器VP200(横河)的调校步骤:1、检查气路、电路是否满足定位器工作要求;2、给定12mA信号,将反馈杆调整至水平位置,并紧固;3、给定8mA信号,通过零位调节螺母将零位调节至对应值;4、给定16mA信号,通过量程调节螺母将量程调节至对应值;5、给定4mA信号,检查阀门全关位置,必要时进行微调;6、给定20mA信号,检查阀门全开位置;必要时进行微调;7、给定4mA(或20mA)、8mA(或16mA)、12mA、4mA(或 20mA)、16mA(或8mA)、20mA(或4mA)进行刻度验证,必要时进行微调。
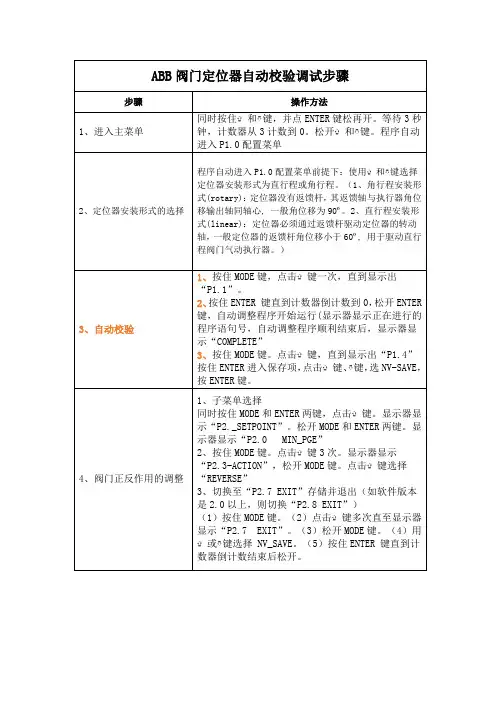
ABB气动调节门调试步骤
1、接上气源,压力在0.4至0.6间.
2、输入4到20MA信号
3、检查安装位置
(1)按下并保持MODE键,利用上升和下降箭头直到出现1.3模式,
松开MODE键,再按上升或下降箭头,使机械限位停止.检查全
开和全关,看数值是否在28---负28之间.
4、进入参数调整
同时按住上升和下降箭头,并保持.完后再按确认键,直到从3到0完成后,松开上升和下降键,装置自动进入P1组参数。
5、选择执行器种类,用上升和下降键选择角行程还是直行程我厂
的门应选择LINEAR。
6、启动自动调整功能
(1)按下并保持MODE键,按住上升键,直到P1.1显示出来,松开MODE键.
(2)按确认键并保持住直到倒计时开始,松开确认键,若显示CONPLTB,表示已经完成自动调整.
7、误差调整调整
8、按住MODRR键,通过上升和下降键,出现P1.4,松开MODE 键,通过上上升或下降箭头选择NV---SA VE,保存,按下保持确认键,直到一直降到0,并松开此键.。
莱城电厂一期工程中的除氧器大小阀采用了带有FISHER-ROSEMOUT公司最新推出的FIELDVUE®DVC5000系列数字式阀门控制器的气动调阀。
运用此种数字式阀门控制器通过HART通讯器可以实现在集控室内对现场阀门进行操作、诊断、标定、组态。
HART 通讯协议是80年代中期由ROSEMONT公司开发的一种可寻址的远程传感器数据公路通讯协议(HIGHW AY ADDRESSABLE REMOTE TRANSDUCER)。
在BELL 202通讯标准基础上,采用移频键控制方式FSK(FREQUENCY SHIFT KEYING),使用 1.2KHZ和2.2KHZ载波在4-20mA模拟信号上完成数字信号传送。
一、简介除氧器大小阀的校验是通过275型HART通讯器完成的。
通讯器的外观如图一。
下面简单介绍一下其各部件的用途。
1.当显示屏上的条目未显示完时,屏幕上会出现↑或↓以提示,可?ü 颉 泄龆 ≡瘛?2.通过→键可以进入下一级子目录。
3.现在正在应用上标键。
4.心型标志不停跳动时,表示通讯器正在与就地设备通讯中。
5.当此符号出现时,表示电池需更换。
6.当此符号出现时,表示在子目录中,按←键可返回上一级目录。
< br>7.功能键F1~F4。
在操作过程中,在功能键的上方屏幕上会自动出现提示性字符,告诉你功能键此时的用途.常见的有:1) HELP 帮助了解正在显示的部分.2) SEND 将设定好的信息发送至就地设备.3) BACK 返回上一级目录.4) HOME 返回在线菜单.5) EXIT 从只读的信息中退出.6) ABORT 不保存信息或数据,退出.7) OK 进入下一目录.8) ENTER 将选定的信息送至就地设备。
9) DEL 删除以输入的信息。
10) ESC 不保存信息或数据,退回原目录.8.操作键。
1)I/O键:开关键。
2)↑键、↓键、→键、←键:方向键。
梅索尼兰MASONIELANSV-II 阀门定位器调校步骤第一种方法:1.在**DEVICESETUP** 〔设备设置〕菜单模式选择第3项**SETUPWIZARD** 〔设备向导〕选项菜单并进入**AIRACTIONCONFIGURARTION** 菜单。
2.在AIRACTIONCONFIGURARTION 菜单项选择择第1项SKIPTHISTASK 〔跳过〕进入FINDVALVESTOPS 菜单。
3.在FINDVALVESTOPS菜单下选择第2项RUNAUTOSTOPS作为定位器的全开全关校验,完成后进入AUTOTUNE 菜单。
4.在AUTOTUNE 菜单下选择第2项RUNAUTOTUNE 做定位器PID参数校验,完成后进入RESETTOFACTORYDEFAULT 菜单。
5.在RESETTOFACTORYDEFAULT 菜单下选择第1项SKIPTHISTASK〔跳过〕返回初始菜单。
注意:SVIIIAP定位器用HART375校验时,HART375必须经过升级后才能使用。
第二种方法:1.将定位器安装到阀门,接上正常的电气信号,连接HART375与定位器,进入NORMALMODE菜单模式。
2.在NORMALMODE 菜单下选择第4项MANUALMODEMENU 〔手动模式菜单〕并进入。
3.在MANUALMODEMENU 〔手动模式菜单〕下选择第3项CALIBRATEMENU 〔校验菜单〕,并进入。
4.在CALIBRATEMENU 〔校验菜单〕下选择第1项RANGE并进入CHOOSE菜单。
5.在CHOOSE菜单下选择AUTOSTOPS作定位器快开快关校验。
6.完成后返回CALIBRATE MENU〔校验菜单〕,选择第2项TUNING 并进入TUNING CHOOSE选项菜单。
7.在TUNINGCHOOSE 选项菜单下选择第2项AUTOTUNE 自动校验PID。
8.完成后按以上步骤返回到最初菜单。
1梅索尼兰MASONIELANSV-II阀门定位器调校步骤通讯器与电气定位器连接后,开机显示:HARTAPPLICATION(HART协议应用)FOUNADTIONFIELDBUSAPPLICATION(现场总线协议应用)SETTINGS(375内部设置)LISTENFORPC(浏览PC机)SCRATCHPAD〔翻开文本编辑器〕选择第一项HARTAPPLICATION后按Delete键后显示:1、OFFLINE(离线设置)2、ONLINE(在线设置)3、UTILITY(公用信息)4、HARTDIAGNOSTICS(HART协议诊断)选择第2项ONLINE后显示:1、MODE(模式)2、INPUTSIGNAL(输入信号)3、VALVEPOSITION(阀门定位器)4、MANUALSETPOINT(手动设置点)5、READPRESSURES(读取压力)6、DEVICESETUP(设备组态)7、STATUS/DIAGNOSITICS(状态/诊断)选择第6项DEVICESETUP后显示:2NON-ZEROSTATUSCODE〔S〕FOUNDIGNORENEXT50OCCURRENCESOFSTATUS?〔非零状态码建立无视下个50状态事件〕RESET〔重新调试〕YES NO按YES键后显示:1、MODE(模式)2、CHANGEMODE(改变模式)3、SETUP WIZARD(设置向导)4、MANUALSETUP(手动设置)5、CONFIGURATION(构造)6、CALIBRATION(校验)7、COMMISSIONINGSER(试车)选择第3项SETUP WIZARD后显示:Thismodeisnotappropriateforthesetupwizard.ClickOKtochangemodeorAborttoexitsetupwizard.〔这个模式没有从设置向导拨出。
MJ3系列门窗物理性能试验机位移、压力、风量测量计量标定操作说明一 位移传感器标定(宇光表,位移传感器量程75mm )(1) 将待标定的位移传感器安装在标定台上,固定好,位移传感器尽量升长,保持零位;记录此时仪表显示值为初始值;(2) 然后用60mm 的量块安装到位移传感器下,记录此时仪表显示值为校正值:计算修正值公式:修正值K 值= 60/(校正值-初始值)(3) 按住持续时间大致四秒钟左右,进入二级参数设置屏;“PV ”栏显示“LOCK”;(4) 一下一下按,直到“PV ”栏显示“SLH ”,观察“SV ” 栏原来的量程值(出厂默认为75计算位移表量程修正公式:位移表修正后的量程 =修正值K 值*原来的量程值(5) 然后按“ SV ” 栏的值修改成“位移表修正后的量程”(6) ”,直到退出二级参数设置屏,回到原始的测量状态。
(7) 如果修改正确,此时应该显示测量值为“60.00±0.02”,如果偏差大,必须重新计算,重新修改。
(8) 然后按“1mm\2mm\5mm\10mm\20mm\30mm\40mm\50mm\60mm ”的量块进行计量标定。
(9) 位移传感器的标准要求“精度为满量程的0.25%”,即75mm 量程的位移传感器的绝对误差不超过0.19mm, 100mm 量程的位移传感器的绝对误差不超过0.25mm 为合格。
二 压力传感器标定2.1 零点修正(±6000Pa 与±300Pa 的两个压力表分别修正)(1) 首先将静压箱全部入口密封,压力变送器的“+”与“-”取样口与大气相连,确保压力差为“0”;(2) ;(10)按住 持续时间大致四秒钟左右,进入二级参数设置屏;“PV ”栏显示“LOCK ”;”,直到“PV”栏显示“SC ”,观察“SV ” 栏原来的零点值(出厂默认为0);计算压力表零点修正公式:压力表修正后的零点值=原来的零点值-测量初始值(11)然后按“ SV ” 栏的值修改成“压力表修正后的零点值”(12”,直到退出二级参数设置屏,回到原始的测量状态。
SFW-S(C)型单通道阀门伺服控制卡(用于T940/T2550 DDV阀)调试说明
(1).面板上电位器说明:
显示调零:显示零位调整电位器
显示调满:显示满位调整电位器
颤振调幅:颤振输出幅度调整电位器
反馈调零:反馈输出零位调整电位器
反馈调满:反馈输出满位调整电位器
输出调零:变送输出VO1零位调整电位器
输出调满:变送输出VO1满位调整电位器
注:VO1(VO1+、VO1-):输出0~100mv到控制器
VO2(VO2+、VO2-):输出0~5V供远传显示
伺服电流输出AO(AO+、AO-):输出-10mA~10mA
(2).底板上跳线器、电位器说明:
k×1跳线器短接:比例增益1倍
k×2跳线器短接:比例增益2倍
k×3跳线器短接:比例增益3倍
k×4跳线器短接:比例增益4倍
注意:k×1~k×4跳线器全部短接时,比例增益最小,约为0.2倍。
k×1~k×4跳线器全部断开时,比例增益最大,约为12倍。
k5跳线器短接:伺服卡内给定控制信号;
断开:控制器给定控制信号(出厂时为断开)
w5: 伺服卡内给定控制信号4~20mA调节电位器
w6: 变送输出VO2零位调整电位器
w10: 变送输出VO2满位调整电位器
k1跳线器短接:输出颤振(出厂时为短接)
伺服卡使用说明书断开:无颤振输出
KOPC跳线器:
短接I+:OPC动作时伺服输出正向最大电流;(出厂时短接I+)
短接I-:OPC动作时伺服输出反向最大电流
静态调试步骤:
A.汽轮机静态拉阀试验:
首先,开交流润滑油泵和高压油泵。
将手拍危急遮断器拉出,然后手拉挂闸装置手柄保持一段时间,使安全油建立,主汽门能缓慢打开。
(也可以在DEH画面中点击远方挂闸使挂闸电磁铁带电开启主汽门)
然后,拔掉DDV阀插头,旋转DDV阀块上的手调节流孔使油动机能打开或关闭(顺时针旋转油动机打开,逆时针旋转油动机关闭)。
调节节流孔在油动机全关时调节伺服卡上的“显示调零”电位器使数码管显示为零,然后调节输出调零电位器,使VO1为0V;VO2为0V;调节节流孔在油动机全开时调节伺服卡上的“显示调满”电位器使数码管显示为135,然后调节输出调满电位器,使VO1为100mV;VO2为5V;然后调整手调节流孔使油动机缓慢向关闭方向移动,这时锁紧节流孔锁紧螺母。
接着,插上DDV阀插头,在DEH拉阀试验画面中,指令给定0%时,调节伺服卡上的“反馈调零”电位器使数码管显示为零。
指令给定100%时,调节伺服卡上的“反馈调满”电位器使数码管显示为135。
B.OPC开关量调试:
1, 将端子DI+/DI-短接
2, 判断端子AO+/AO-的输出电流极性是否满足要求。
如与要求的电流极性相反,则将跳线器S2-1 ,S2-2重新设置(出厂设置为电流由AO+流向AO-))
S2-1: ON;S2-2:OFF,则伺服输出AO+/AO-电流输出为负(电流由AO-流向AO+)
S2-1: OFF;S2-2:ON,则伺服输出AO+/AO-电流输出为正(电流由AO+流向AO-)(出厂默认设置)C,颤振的调试
1,在端子AO+/AO-接60欧姆左右的电阻
2, 位移传感器滑杆调至零刻度,同时在AI输入4 mA,此时伺服输出AO应为直流0V左右。
3, 旋转颤振调节电位器WAC,同时观察伺服输出交流电压,应当可以由0V连续升至交流4V左右。
4,伺服输出交流电压调至交流5V,将跳线器S3-1断开(OFF),伺服输出交流电压应为0V。
5,重新将跳线器S3-1接通(ON),将伺服输出交流电压调至交流1V
D,放大环节调试
通过选择增益跳线器S1可以将回路增益设为:1倍,2倍,3倍,4倍(注意,出厂增益设为:1)。
南京科远控制工程有限公司 1。