激光二维扫描传感器ZLDS200用于IC芯片的引脚
- 格式:doc
- 大小:149.00 KB
- 文档页数:2


ZLDS200焊缝跟踪测量__的应用__焊缝跟踪测量焊接过程中存在着强烈的热、烟尘和弧光,工作环境非常恶劣(如图1),导致工人效率较低,因此工业机器人和自动焊机有非常广阔的应用前景。
目前弧焊机器人大多是第一代示教再现式机器人,其适应能力差、对工装和定位装置的精度依赖性高。
图1 焊接现场通过使用传感器跟踪测量焊缝可以增强弧焊机器人适应性。
传感器的作用是实现对焊接过程的自动跟踪和焊接质量的实时控制,所谓焊缝跟踪是指在焊接时实时检测出焊缝的偏差,并相应调整焊接路径和焊接参数,保证焊接质量。
常用的焊缝检测方法有:机械式、声学式、电磁式和光学传感式等,如图2图2 焊接方式而光学传感器不仅能检测出焊缝的中心位置,还能获得焊缝的形状和尺寸等特征参数,并且是无接触的,0755 - __-__ / __-__/__-__是很有前途的一种方法。
真尚有__激光二维扫描传感器就是一款代表性产品,__-__/__-__如图3和图4。
详情请致电深圳真尚有公司,号码在这段里上两行,这里的上传文档要求太严格了,没办法,还请读者原谅,其中上面一行为电话,下面一行为传真。
__的应用图3 __实物图4 __原理__焊缝跟踪测量方案整体方案:__传感器扫描系统沿着工件边缘需焊接的位置扫描一遍,得出还没焊接之前的拼接轮廓,从而调节焊枪的焊接方向和高低定位。
焊接完之后,传感器再扫描一遍,检查焊接的情况,是否有断焊、过焊的情况,如图5。
图5 __测量示意图焊缝检测:利用高速和高精度的__激光传感器扫描焊缝表面,可以得到焊缝表面的轮廓图像,如图6。
通过一定的算法可以测量焊缝成形的几何参数如焊缝宽度、余高、焊趾角度等,还可探测咬边、焊瘤和表面气孔等缺陷,并且通过数字输出至PC直观地显示出焊缝的轮廓图,如图7。
图6 __成像示意图__的应用图7 焊缝测量系统示意图传感器随焊机滑架导轨运动,将有形状的焊缝看做目标,扫描焊缝,得到测量数据,通过软件运算取出焊缝特征,对焊缝轨迹数据做取中处理,可得出轨迹直线数据,如图8。

北华航天工业学院课程设计报告(论文)设计课题:基于51单片机智能循迹小车设计专业班级:B12242学生姓名:***指导教师:**设计时间:2014年6月15日北华航天工业学院电子工程系基于51单片机智能循迹小车课程设计任务书指导教师:王晓教研室主任:王晓2014年06 月15 日注:本表下发学生一份,指导教师一份,栏目不够时请另附页。
课程设计任务书装订于设计计算说明书(或论文)封面之后,目录页之前。
内容摘要本设计主要有单片机模块、地面寻线模块、发光二极管模块,电机驱动模块以及电源模块组成,小车具有自主寻迹的功能。
本次设计采用ATMEL公司的AT89C2051单片机作为控制芯片,传感器模块采用红外接收管和比较器实现,能够轻松识别黑白两色路面,同时具有抗环境干扰能力,电机模由LM393芯片和两个直流电机构成,组成了智能车的动力系统,电源采用5V的直流电池,经过系统组装,从而实现了小车的自动循迹的功能。
索引关键词:智能小车AT89C2051 单片机LM393 红外接收管目录一概述 (1)二方案设计与论证 (8)三单元电路设计及各模块具体电路 (3)3.1. 电路中51单片机芯片介绍 (13)3.2 最小系统部分电路 (19)3.3控制模块电路电路 (20)3.4电机驱动及二极管模块电路 (20)3.5寻线检测模块部分电路 (21)3.6软件设计 (22)四总原理图及元器件清单4.1总原理图 (23)4.2元器件清单 (23)五安装与调试5.1.电子元器件的装配 (24)5.2.机械装配 (25)5.3.总装 (25)六性能测试与分析6.1测试方法及注意事项 (26)6.2源程序 (26)七结论 (27)八心得体会 (28)九参考文献 (29)一、概述目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
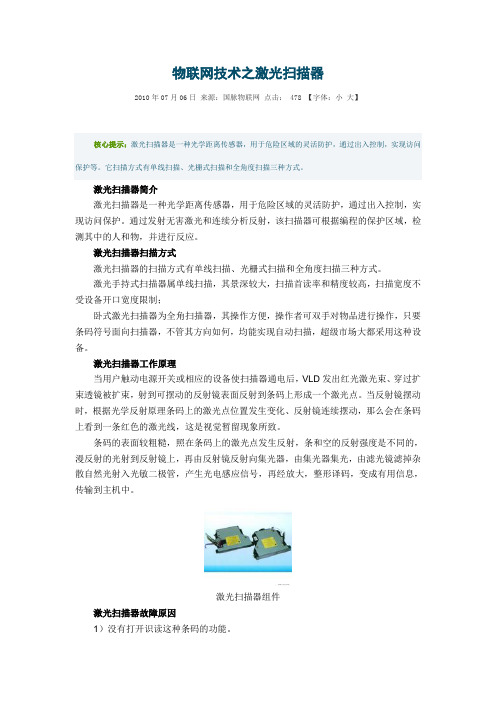
物联网技术之激光扫描器2010年07月06日来源:国脉物联网点击:478 【字体:小大】核心提示:激光扫描器是一种光学距离传感器,用于危险区域的灵活防护,通过出入控制,实现访问保护等。
它扫描方式有单线扫描、光栅式扫描和全角度扫描三种方式。
激光扫描器简介激光扫描器是一种光学距离传感器,用于危险区域的灵活防护,通过出入控制,实现访问保护。
通过发射无害激光和连续分析反射,该扫描器可根据编程的保护区域,检测其中的人和物,并进行反应。
激光扫描器扫描方式激光扫描器的扫描方式有单线扫描、光栅式扫描和全角度扫描三种方式。
激光手持式扫描器属单线扫描,其景深较大,扫描首读率和精度较高,扫描宽度不受设备开口宽度限制;卧式激光扫描器为全角扫描器,其操作方便,操作者可双手对物品进行操作,只要条码符号面向扫描器,不管其方向如何,均能实现自动扫描,超级市场大都采用这种设备。
激光扫描器工作原理当用户触动电源开关或相应的设备使扫描器通电后,VLD发出红光激光束、穿过扩束透镜被扩束,射到可摆动的反射镜表面反射到条码上形成一个激光点。
当反射镜摆动时,根据光学反射原理条码上的激光点位置发生变化、反射镜连续摆动,那么会在条码上看到一条红色的激光线,这是视觉暂留现象所致。
条码的表面较粗糙,照在条码上的激光点发生反射,条和空的反射强度是不同的,漫反射的光射到反射镜上,再由反射镜反射向集光器,由集光器集光,由滤光镜滤掉杂散自然光射入光敏二极管,产生光电感应信号,再经放大,整形译码,变成有用信息,传输到主机中。
激光扫描器组件激光扫描器故障原因1)没有打开识读这种条码的功能。
2)条码不符合规范,例如缺少必须的空白区,条和空的对比度过低,条和空的对的宽窄比例不合适。
3)阳光直射,感光器件进入饱和区。
4)条码表面复盖有透明材料,反光度太高,虽然眼睛可以看到条码,但是采集器识读条件严格,不能识读。
5)硬件故障,和经销商联系进行维修。
在笔记本电脑上,键盘接口的扫描器工作不正常,或扫描器正常而键盘不能工作。

LSPD mini 型安全激光扫描仪使用说明书避障+测量二合一型(2018年5月)山东科力光电技术有限公司⏹指令和标准LSPDmini型安全激光扫描仪(简称LSPD mini)符合下列标准的要求欧盟指令机械安全指令2006/42/EC EMC指令2004/108/EC欧洲标准EN61496-1(Type3)EN61496-3(Type3)EN60825-1(1类激光产品)EN13849-1(PL d)国际标准EN61496-1(Type3)EN61496-3(Type3)EN13849-1(PL d)国家标准GB/T19436.1GB19436.3GB4208(IP65)⏹安全注意事项以下安全警示标志,用以警告潜在的人身伤害危险,请务必遵从所有带有此标志的安全信息,以避免可能的伤害。
注意这是关键信息提示标志。
标志内容很重要。
作业人员必须了解并按内容要求严格执行,避免可能出现意外的安全事件。
警告这是安全警示标志。
标志内容非常重要。
作业人员必须严格执行标志提示的安全信息,避免可能出现意外的安全事件⏹安全使用注意事项注意在使用LSPD mini前,仔细阅读本说明书,了解安装、操作及设置的程序和要求。
LSPD mini应当由专业人员进行选型、安装、检修和保养。
专业人员是指经过专业培训并取得认可资格的人员,或者有着丰富的知识、培训和经验且已经被证明拥有解决此类问题能力的人员。
为避免光路打在地面上,LSPD mini的安装高度应≧200mm。
安装时尽量使LSPD mini远离振动区域。
当USB接口打开时,应防止水汽、灰尘等进入LSPD mini。
为了在使用中达到IP65防护等级,请将USB接口上黑色的密封盖压紧盖好。
不可跌落LSPD mini。
LSPD mini使用时应符合当地的相关标准和法律法规。
用户应当建立安全操作管理的规章制度并有效执行。
⏹应用场合LSPD mini 主要应用于工业现场,典型应用包括固定危险区域的防护和自动导引运输车(AGV)的导航、防碰撞。
产品使用说明书V1.0SY210声明本说明书版权属苏州能斯达电子科技有限公司(以下称本公司)所有,未经书面许可,本说明书任何部分不得复制、翻译、存储于数据库或检索系统内,也不可以电子、翻拍、录音等任何手段进行传播。
感谢您使用能斯达科技的系列产品。
为使您更好地使用本公司产品,减少因使用不当造成的产品故障,使用前请务必仔细阅读本说明书并按照所建议的使用方法进行使用。
如果您不依照本说明书使用或擅自去除、拆解、更换传感器内部组件,本公司不承担由此造成的任何损失。
您所购买产品的颜色、款式及尺寸以实物为准。
本公司秉承科技进步的理念,不断致力于产品改进和技术创新。
因此,本公司保留任何产品改进而不预先通知的权力。
使用本说明书时,请确认其属于有效版本。
同时,本公司鼓励使用者根据其使用情况,探讨本产品更优化的使用方法。
请妥善保管本说明书,以便在您日后需要时能及时查阅并获得帮助。
苏州能斯达电子科技有限公司苏州能斯达电子科技有限公司检测原理产品特点:✓ 数字输出粉尘浓度信号输出,单位 µg/m³;✓ 内置微处理器 MCU 优化了精准的算法;标准串口输字输出 ; ✓ 数字量PWM 脉宽输出和标准串口(USART );✓ 内建软件自校准功能,调试简单、高效准确,一致性好; ✓ 光粒子计数原理、数字量输出、应用简单、通用接口; ✓ 灵敏度高可检测直径 1µm 以上的粒子;✓ 紧凑结构,质量轻(W48xH15.7XD32 mm ),嵌入式安装; ✓ 采用主动进风气流结构,数据实时特性;⏹产品原理概述:SY210 是一款利用激光光学折射法,检测空气中粉尘颗粒数,并内置 M CU 运行系统直接输出,实时环境粉尘浓度数值检测的数字型粉尘传感器,输出数据 单位 µg/m³。
在 L aser(激光)光源和一个图像传感器光轴相交,当带粉尘的气流 通过交叉区域产生反射光。
图像传感器检测到粉尘反射的 Laser 光线,根据精密 高速运放放大及内调制电路及 MCU 计数和算法、 运算系统颗粒数与重量转换, 直接输出粉尘浓度的数字信号,此款传感器能灵敏检测直径 1.0µm 以上的粒子,, 通过内置微处理器 MCU 反复优化了及精准的数据处理,精度得到大幅度提升, 直接输出当前环境中的颗粒物 PM2.5 浓度数值信号,单位 µg/m³。
目录镭神LS10A系列激光传感器 (3)镭神LS10B系列高速高精度激光传感器 (5)镭神LS11A系列激光位移传感器 (7)镭神LS11B系列高速激光位移传感器 (9)镭神LS50系列TOF激光测距传感器 (11)镭神相位法激光传感器 (12)镭神三维激光扫描仪 (13)镭神LS10A系列激光传感器LS10A基本概况LS10A系列激光传感器是深圳市镭神智能系统有限公司研发的近距离高精度的非旋转扫描测距产品。
该传感器运用激光三角法测量物体三维尺寸,可完成物体检查、定位、测量等多种工作任务,帮助客户提高生产力,实现生产控制和质量控制。
LS10A系列激光传感器的扫描频率30Hz,采用USB接口输出数据,根据测量尺寸的不同,可划分为不同的产品型号,具体参数如下表所示。
产品参数LS10A-050 LS10A-095 LS10A-245 LS10A-350 量程起点50mm 70mm 170mm 200mm量程中点55mm 95mm 245mm 350mm量程终点60mm 120mm 320mm 500mm 高度方向测量范围10mm 50mm 150mm 300mm±0.17%FSO ±0.10%FSO ±0.13%FSO ±0.40%FSO5μm 20μm 50μm 1200μm 量程起点10mm 14mm 34mm 40mm量程中点11mm 19mm 49mm 70mm量程终点12mm 24mm 64mm 100mm360测量点/扫描线标准655nm 655nm 655nm 655nm可选405nm 405nm 405nm 405nm2M5mW 8 mW 10 mW 15 mW30° 30° 30° 30°10000lx 10000lx 5000lx 5000lx30Hz 30Hz 30Hz 30HzUSBUSB不锈钢5VDC,±10%IP65阳极氧化铝/不锈钢PMMA/安全玻璃15g2g/20~500Hz0℃~40℃-20℃~+70℃产品应用物体检查形状测量镭神LS10B系列高速高精度激光传感器LS10B基本概况LS10B系列激光传感器是深圳市镭神智能系统有限公司研发的高速高精度的扫描测距产品。
激光二维扫描传感器ZLDS200用于IC芯片的引脚
应用背景
IC芯片的焊接往往是非常精细的工作,虽然现在高度自动化的生产大大提升了效率,但是没有一家设备供应商敢100%的承诺其设备不会出现问题,所以质量控制显得尤为重要。
有没有一款传感器能满足被测物多样、高精度和高采样频率的传感器供客户选用呢?
应用方案
在对IC芯片的引脚的检测时,我们推荐使用激光二维扫描传感器,这种传感器可以适应大部分IC芯片的检测,非接触式检测比以往的电检测效率更高,同时高精度的分辨率更容易识别问题所在。
具体的图示请见下图:
ZLDS200检测IC芯片的引脚
多功能的二维检测软件,可以帮助您处理大量的二维数据信息,得到您想要的数据。
同时我们提供最低层的开发协议,让我们的传感器更加容易融入到您的系统当中去,成为你系统中最有力的一个检测单元,真尚有有一直经验丰富的研发团队,让你打消开不能开发的顾虑。
ZLDS200激光位移传感器
工作原理
传感器的工作是基于光学三角测量原理。
半导体激光发生器①发出的光,经透镜②形成X 平面光幕,并在物体⑦上形成一条轮廓线③,镜片④收集被物体反射回来的光并将其投影到一个二维CMOS阵列⑤,这样形成的目标物体剖面图形被信号处理器⑥分析处理,轮廓线的长
度用X轴计量,轮廓线的高低用Z轴计量。